






1.Introduction
In the field of industrial board counting, in the past, long time continuous observation by human eyes is not only expensive, but also very low efficiency, and there are subjective differences [1]. With the rise of artificial intelligence, the field of computer vision is constantly innovating, image recognition is more and more accurate, a variety of algorithms have emerged, through the design of automatic image recognition algorithm to solve the problem of human eye recognition. In the field of computer vision and image analysis, straight line detection has always been a hot research issue [2]. As a relatively traditional image recognition technology, it can be used as the basis for higher-level image feature analysis. In 2d, compared with curves and points with features [3], straight lines contain more information, such as the center point, slope, starting point, end point and angles of multiple straight lines. If it is a three dimensions object, it can be photographed from different angles, and then the algorithm is used for image recognition. If it is in the dark scene, such as the stratified wood boards are not obvious enough, or the indoor Windows are more reflective, the extraction of image features is relatively rare, and the effect will be relatively poor, you can solve the dark reflective problem by turning on the lights, drawing the curtains and other ways. Linear detection is also widely used in road detection [4-6], image analysis and matching [7-9], detection of vanishing points [10-12], three dimensions graph reconstruction [13-15], remote sensing image analysis [16-19]and other detection.

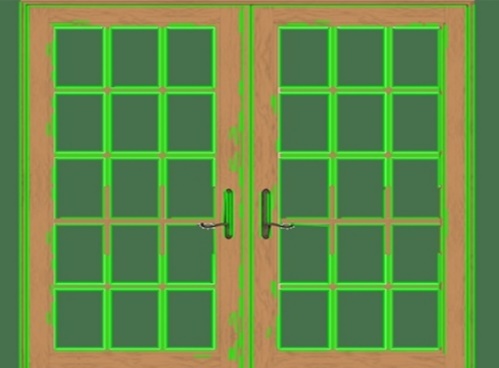
(a) Road detection (b) Image analysis and matching
Figure 1. Application for line detection
In this paper, the existing research progress of line detection is sorted out, and it is applied to the image recognition of wooden panels. The main purpose is to make a comparative study of Hough Transform, FLD and LSD line detection algorithms, so as to see which line detection algorithm can identify the number of wooden panels more accurately and solve practical problems. Finally, the development and application of traditional linear detection algorithm in various fields and industries are prospected, which provides a reference for realizing accurate recognition, improving work efficiency and enhancing intelligence level.
2.Hough transform line detection
At present, Hough Transform linear detection has been studied by universities, research institutes and some domestic research institutes all over the world. Many scholars in mainland China are also committed to this research. For example, Hofer [20] et al. from abroad first proposed the technology of straight line detection, which can also be used to detect objects with regular shapes such as circles. However, at this time, the technology of straight line detection is not mature enough. Problems such as the inability to represent infinite slopes in computers still plague researchers. In this regard, Duda [21] et al. made a new breakthrough in line detection technology by replacing rectangular coordinate system with polar coordinate system, let\( (p,q)=(rcosθ,rsinθ) \), the slope of the perpendicular line is\( tan{(}θ) \)\( tanθ \), the angle between the original line and the X-axis is\( (9{0^{0}}+θ) \)\( {90^{0}}+θ \), then the slope is:
\( tan{9}{0^{0}}+θ=-\frac{1}{tan{θ}}=\frac{-cos{θ}}{sin{θ}} \)(1)
If any point on the straight line is (x, y), the slope is:
\( \frac{y-p}{x-q}=\frac{y-rsin{θ}}{x-rcos{θ}} \)(2)
According to eq (1) and (2):
\( r=xcos{θ}+ysin{θ} \)(3)
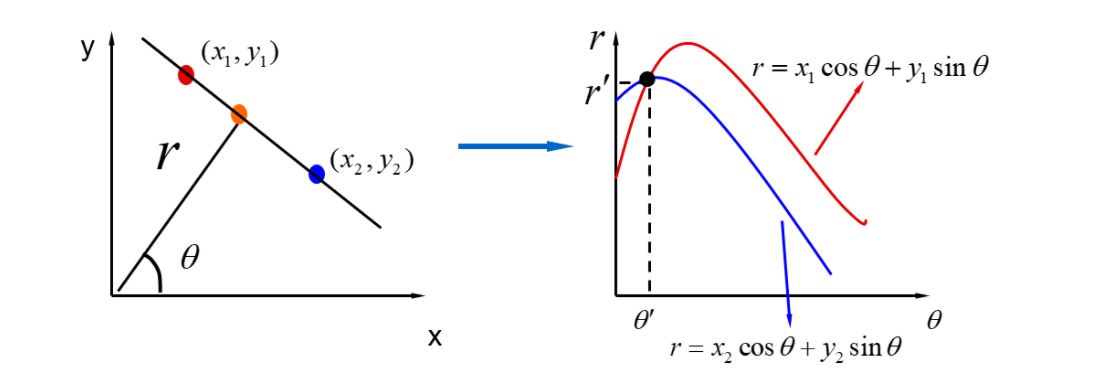
Figure 2. polar coordinate conversion process
After conversion, it can be seen that each point (x, y) in the image space corresponds to a sinusoidal curve in the polar coordinate space\( (r,θ) \), and corresponding to collinear points in image space\( (r,θ) \)all sinusoids in space intersect a point\( ({r^{ \prime }},{θ^{ \prime }}) \), it solves the problem of too large value range and the problem that the slope infinity cannot be expressed in the computer, that's the standard Hough transform.
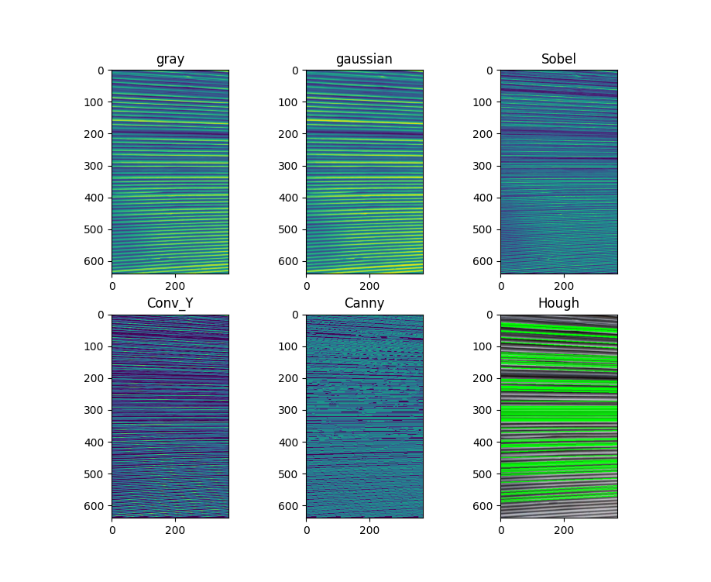
Figure 3. Hough Transform straight line detection
The figure above shows the application process of Hough Transform straight line detection in the actual problem board counting. First, the picture is transformed into a grayscale image, and then the grayscale image is processed with Gaussian. The results of gaussian processing are used to continue the Sobel operator processing, and then the convolution operation for the Y direction is carried out separately. Finally, Huogh Transform were used for detection and the image was drawn. The target recognition rate was sixty percent. Because the layering between boards is not obvious enough and the arrangement is not neat enough, the board of the upper layer will protrude and block the board of the next layer, resulting in the dark light of some parts of the picture taken, affecting the detection. Hough Transform line detection is a technology proposed earlier. It is quite remarkable that image recognition can reach the present level under the interference of a variety of factors, which provides guidance for the development of line detection technology in the future.
3.FLD line detection algorithm
FLD algorithm was first mentioned in the article straight line identification in urban outdoor environment, the paper tried to use the straight line features to replace the original feature points to some construction of outdoor scene recognition and detection, with some features of point and point, the characteristics of the straight line has a more easily find the robustness. Some features of a straight line are largely unaffected by changes in the external environment, such as light intensity, being obscured by other objects, changing multiple perspectives, etc. The supervised strategy is: after the projection, samples within the class should be aggregated together as much as possible, and samples between classes should be separated as much as possible. The degree of aggregation and separation can be measured by the Euclidean distance between the sample and the mean value, the solution method is a matrix composed of feature vectors of the first k spectral radius of\( S_{w}^{-1}{S_{B}} \)\( S_{w}^{-1}{S_{B}} \). X is the sample matrix, W is the projection matrix, y is the projected matrix,\( y={W^{T}}x \)\( y={W^{T}}x \)is the projection process, dichotomies J (W) = degree of hashing between classes / degree of in-class hash:
\( J(W)=\frac{|{\widetilde{u}_{1}}-{\widetilde{u}_{2}}{|^{2}}}{\widetilde{s}_{1}^{2}+\widetilde{s}_{2}^{2}} \)(4)
Among:
\( {\widetilde{u}_{i}}=\frac{1}{{N_{i}}}={w^{T}}{u_{i}} \)(5)
\( s_{i}^{~2}= \)\( \widetilde{s}_{i}^{2}== \)(6)
According to eq (4) and (5) and (6):
\( J(W)=\frac{{W^{T}}{S_{B}}W}{{W^{T}}{S_{W}}W} \)(7)
According to the above simplification results:
\( J(W)=\frac{|{\widetilde{S}_{B}}|}{|{\widetilde{S}_{W}}|}=\frac{|{W^{T}}{S_{B}}W|}{|{W^{T}}{S_{W}}W|} \)(8)
have to:
\( S_{w}^{-1}{S_{B}}w=λw \)(9)
w is the matrix of eigenvectors of the first K spectral radius.
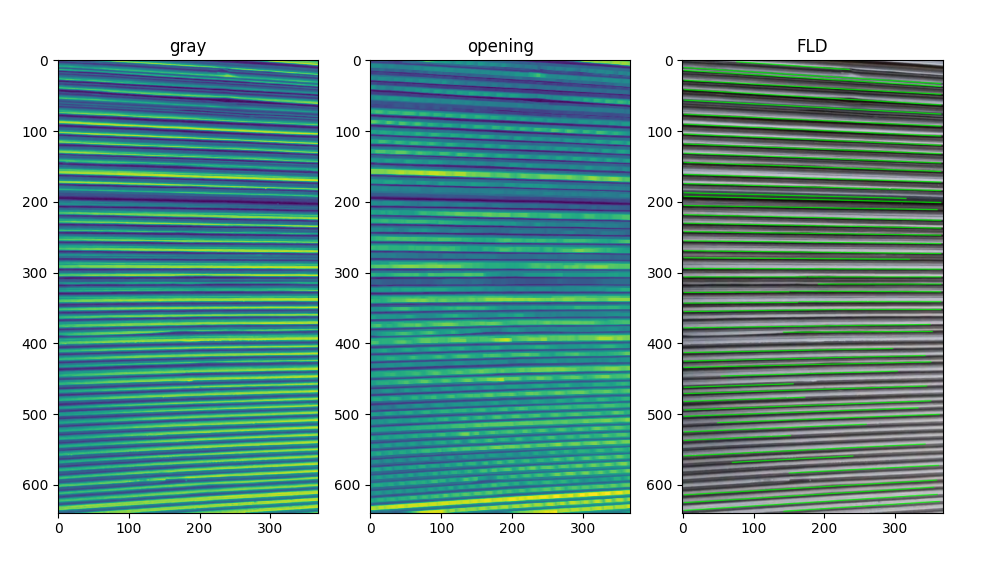
Figure 4. FLD straight line detection
The figure above shows the application process of FLD straight line detection in board counting in practical problems. First, the image is transformed into a gray scale image, then the convolution kernel is set for open operation processing, and an FLD object is created. The FLD object is used to call DETECT to execute detection results and return line data. As can be seen from the figure above, FLD's recognition effect is much better than Hough's, and the target recognition rate is as high as eighty-five percent. FLD is a line detection algorithm which has been improved greatly after Hough Transform, providing a new idea for intelligent recognition and scientific counting, and opening a new door in the field of line detection algorithm.
4.LSD line detection algorithm
LSD algorithm was proposed by Rafael Grompone et al in LSD: A Line Segment Dectctor. The time complexity of LSD algorithm is much lower than that of Hough, which saves a lot of time and improves efficiency. LSD algorithm is a local exploration and recognition of an image, calculate the set of pixels of a straight line, and then verify the solution by assuming each parameter, and then combine the set of pixels with the set of control errors, which can control the number of error detection adaptively. Generally, when it is necessary to identify an image and detect a straight line, the most intuitive idea is to identify and detect the collection of pixels in each part of the image with relatively large gradient changes. LSD algorithm is to detect the straight line of the image through the information of the gradient and the lines of the row and column. The purpose of LSD is to detect the part of the image where the pixel value jumps relatively large, which is generally the straight contour area, which is also one reason why we call it straight line segmentation. So gradients and row column lines are different, as shown here:
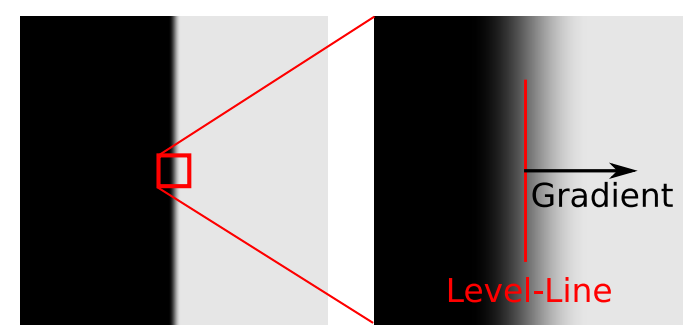
Figure 5. gradient and row column line
LSD will be calculated each pixel point around the degree of the ranks of the line, to produce a procession line area, in this region, each vector and a datum line tangent, so this area is divided into multiple parts can be connected, and under certain conditions they would have the same point of view of the ranks of the line. The connected area is called the line feasible region, as shown in the figure.
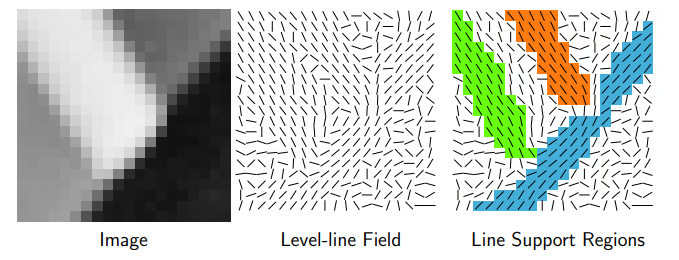
Figure 6. line feasible region
The line feasible region is a candidate region for linear segmentation, which requires a rectangular contour to correspond to it. The central axis of the feasible region of the line is used as a principal orientation of the rectangle that covers the entire region. A point in a rectangular area where the line and line angles and the principal axis angles are the same within a certain tolerance range is called a homogeneous point. In general, the number of all pixels in the homogeneous point and rectangular area will be calculated as an alternative area. LSD input must be a greyscale image, segmentation result set after the output is linear, the design idea of it is an automatic, intelligent image recognition and detection method, this method does not need to adjust the parameters, only need a few parameters can adjust the final performance of the algorithm, the several parameters is written after careful consideration, so as to adapt to a variety of actual situation. The following figure shows the process of LSD straight line segmentation
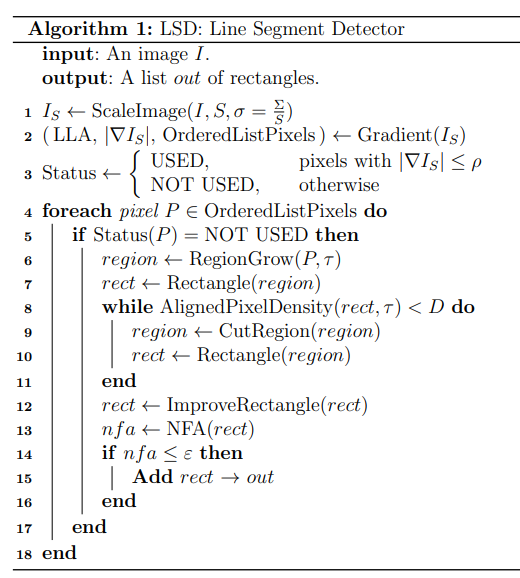
Figure 7. LSD straight line segmentation flow chart
At the beginning of LSD algorithm, the input grayscale image is changed to eighty percent of the original, and the purpose of image reduction is to reduce the influence of the sawtooth in the image. Blur operation can also reduce the influence of the sawtooth in the image, but some white noise may be wrongly detected, which requires open operation. The image is reduced by gaussian down sampling. Gradient calculation can be expressed by the following formula:
\( {f_{x}}(a,b)=\frac{p(a+1,b)+p(a+1,b+1)-p(a,b)-p(a,b+1)}{2} \)(10)
\( {f_{y}}(a,b)=\frac{p(a,b+1)+p(a+1,b+1)-p(a,b)-p(a+1,b)}{2} \)(11)
Here, p(a,b) is the pixel value of grayscale image, and the angle calculation formula of row and line is as follows:
\( arctan(\frac{{f_{x}}(a,b)}{-{f_{y}}(a,b)}) \)\( arctan(\frac{{f_{x}}(a,b)}{-{f_{y}}(a,b)}) \)(12)
Gradient amplitude:
\( F(a,b)=\sqrt[]{f_{x}^{2}(a,b)+f_{y}^{2}(a,b)} \)(13)
LSD straight line segmentation is directional, there is a gradient difference of 180 degrees from white to black and from black to white, that is to say, the starting point and end point of LSD segmentation can not be arbitrarily changed. LSD line segmentation generally starts from pixels with high gradient amplitude, because the edges of pixels with high gradient amplitude are relatively strong, and the quicksort algorithm requires\( O(nlog{n}) \)operations, and pseudo sorting can be realized in linear time. As for the threshold value of the gradient, the region with little change of pixels, that is, the pixel with gradient amplitude less than a certain value, will not be put into the line feasible region. For region growth, select any unused point in the sorting as the test point. Region growth will create a line feasible region. Unused region points will be updated.
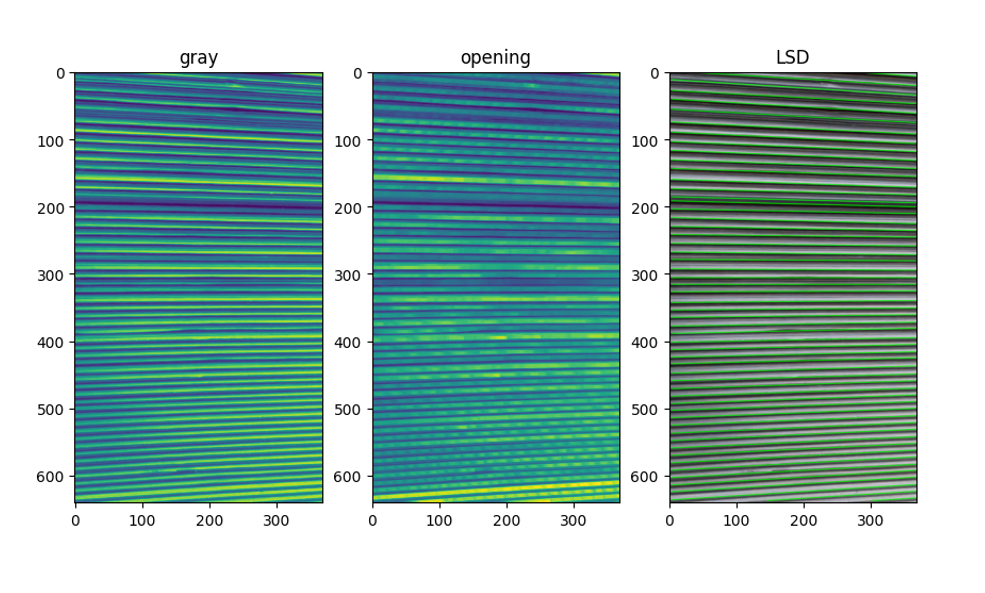
Figure 8. LSD straight line detection
The figure above shows the application process of LSD straight line detection in the actual problem board counting. First, the image is converted to gray scale, a convolution kernel is set for open operation, an LSD object is created, detect is used to execute detection results, and all the detected line data is returned, and then the line is drawn on the original image. It can be seen from the figure above that LSD has a much better recognition effect than Hough Transform and FLD, and the target recognition rate is as high as ninety-nine percent, which can be said to be a perfect algorithm in the field of practical problem board counting. Using only a pretreatment process of open operation and achieved the effect of better than expected, save a lot of time, improves the accuracy of recognition, LSD is great after Hough Transform and FLD ascension linear detection algorithm, its rapid and efficient characteristics favored by many researchers, for the intelligent identification, counting science provides an efficient algorithm, The rise of the era of artificial intelligence. The following table shows the mechanism, advantages and disadvantages of the three line detection algorithms.
Table 1. Cparison of line detection algorithms
|
Algorithm |
mechanism |
advantage |
shortcoming |
|
Hough Transform line detection |
Edge points are used to detect lines |
Simple implementation, easy to understand, more convenient |
Short line segment cannot be detected, breakpoint detection is not accurate enough, and the dense edge part is prone to problems |
|
FLD line detection |
Replace original SURF point features with straight line features |
Compared with the previous algorithm, the recognition effect is better and the speed is faster |
In the case of external environment interference, the recognition effect is not particularly good |
|
LSD line detection |
Based on local image analysis, the pixel point set is calculated, and the solution is verified by assuming parameters |
Faster, more accurate identification and detection |
The line segments identified in some places are incoherent, resulting in over-segmentation |
5.Existing problems
Although early years has a large number of researchers engaged in the research of various linear detection algorithm, a variety of algorithm emerge in endlessly, the accuracy and effect of detection and recognition method has significantly improved, reducing the cost of time, but these algorithms to solve practical problems in real life there are still some shortcomings, mainly has the following several aspects.
1) When taking photos to collect experimental data, there will be serious reflection phenomenon if there is glass in the room, which will affect the recognition and detection of the algorithm. If there is no glass in the room and the light is dark, the collected data will appear that the layering between each board is not obvious, affecting the detection of straight lines, you can turn on the lamp to increase the light to solve the problem of low light. If the boards are placed too neatly, and each one is exactly the same color, there will be no gap between the boards, and the algorithm will determine that there is no boundary, resulting in false detection. Different shooting angles can also have an impact, as can shooting things other than the detection target.
2) In a real large factory environment, there are high requirements on shooting materials, with strict requirements on shooting angle, location, clarity, etc. The factory has a large space, and multiple sets of data need to be shot, specific analysis of specific scenes will consume certain human resources.
3) So far, researchers have designed most of the straight line detection algorithm is suitable for detection of specific environment or objects, each one has its own recognition principle, each have advantages and disadvantages, in the face of complex practical problems, will not be able to flexibly respond to various changes, intelligent remains to be improved, testing does not have universality.
6.Expectation
Straight line detection is widely used in computer vision, promote the development of the intelligent identification, for industrial intelligent identification, detection plays a very important role in the development of wisdom, in order to make the linear detection algorithm of identification is more accurate, further optimized, in the near future linear detection algorithm can from the following several aspects to explore and research.
1)Ultra clear image data without interference. Ultra clear image data without interference is very important to the recognition of line detection algorithm. Ultra clear image data without interference can improve the accuracy of line detection algorithm recognition, so as to improve the final recognition effect. It can develop more intelligent data acquisition technology of actual scene image, research and manufacture equipment and instruments that can flexibly cope with external environmental interference, so as to overcome problems such as reflection, shadow and interference of things unrelated to the detection target.
2) Optimization and improvement of line detection algorithm. By integrating the ideas of various algorithms and taking various factors into account, a better algorithm can be constructed, which can flexibly cope with and better solve practical problems, and improve the timeliness of the application of linear detection algorithm in real life.
With the development of artificial intelligence, computer vision is becoming more and more rapidly, the development of the new algorithm emerge in endlessly, in the actual problem is becoming more and more widely, the application of algorithm combined with the algorithm and optimization will be a new direction of the development of the later, the researchers in the future, with the help of algorithm will be more mature, will be more flexible to solve practical problems in real life, Will usher in a new era of intelligence.
7.Acknowledgment
The research was partly supported by National Natural Science Foundation of China (No.61775139) and Zhejiang Provincial Key R & D Plan (No.2020C02020) .
References
[1]. DAVIS A D,NOSEWORTHY M D. Motion and distortion correction of skeletal muscle echo planar images. Magnetic Resonance Imaging, 2016,21(7): 196-202.
[2]. HENG Hang jia, ZHONG Baojiang. Overview and evaluation of image straight line segment detection algorithms. Com-puter Engineering and Applications, 2019, 55(17) 9-19.
[3]. Micusik B,Wildenauer H.Descriptor free visual indoor localization with line segments//IEEE Conference on Computer Vision and Pattern Recognition,Boston,USA,2015: 3165-3173
[4]. Pumarola A,Vakhitov A,Agudo A,et al.PL- SLAM:real-time monocular visual SLAM with points and lines// IEEE Conference on Robotics and Automation,Singa-pore,2017: 4503-4508.
[5]. Zhou H,Zou D, Pei L, et al.Structslam: visual SLAM with building structure lines.IEEE Transactions on Vehicular Technology, 2015, 64(4): 1364-1375.
[6]. Bista S R,Giordano P R,Chaumette F.Appearance-based indoor navigation by IBVS using line segments. IEEE Robotics and Automation Letters, 2016, 1 (1) : 423-430.
[7]. Lian Lin, Li Guohui, Zhang Jun, et al. Automatic registration algorithm of infrared and visible images based on step-by-step parameter estimation. Acta electronica Sinica,2012,40(9): 1829-1838.
[8]. Xue N,Xia G S,Bai X,et al.Anisotropic-scale junction detection and matching for indoor images.IEEE Trans-actions on Image Processing,2018,27(1):78-91.
[9]. Wang L,Neumann U,You S.Wide-baseline image matching using line signatures//IEEE Conference on Computer Vision,Kyoto,Japan,2009:1311-1318
[10]. Kroeger T,Dai D,Gool L V.Joint vanishing point extraction and tracking//IEEE Conference on Computer Vision and Pattern Recognition,Boston,USA,2015:2449-2457
[11]. Lezama J,Grompone Von Gioi R,Randall G,et al.Finding vanishing points via point alignments in image primal and dual domains//IEEE Conference on Computer Vision and Pattern Recognition,Columbus,USA,2014:509-515
[12]. Yoo J H,Lee S W,Park S K,et al.A robust lane detection method based on vanishing point estimation using the relevance of line segments.IEEE Transactions on Intelligent Transportation Systems,2017,18(12):3254- 3266.
[13]. Ramalingam S,Brand M.Lifting 3d manhattan lines from a single image//IEEE International Conference on Computer Vision,Sydney,Australia,2013:497-504.
[14]. Sugiura T,Torii A,Okutomi M.3D surface reconstruction from point- and-line cloud//International Conference on 3D Vision,Lyon,France,2015:264-272.
[15]. Micusik B,Wildenauer H.Structure from motion with line segments under relaxed endpoint constraints.International Journal of Computer Vision,2016,124(1):65-79.
[16]. Miao qiguang, Weng Wenqi, Xu Pengfei. A new algorithm for water free bridge recognition in remote sensing images. Acta electronica Sinica,2011,39(7):1698-1701.
[17]. Tang Gefu,Xiao Zhifeng,Liu Qing,et al.A novel airport detection method via line segment classification and texture classification.IEEE Geoscience and Remote Sensing Letters,2015,12(12):2408-2412.
[18]. Budak U,Halici U,Sengur A,et al.Efficient airport detection using line segment detector and fisher vector representation[J].IEEE Geoscience and Remote Sensing Letters,2016,13(8):1079-1083.
[19]. Li Xuan, Liu Yunqing, Bian Chunjiang, et al. Detection of alongside ships in optical remote sensing images under local salient features. Chinese Journal of image and graphics,2016,21(5): 657-664.
[20]. Hofer M,Maurer M,Bischof H.Efficient 3d scene abstraction using line segments.Computer Vision and Image Understanding,2017,157:167-178.
[21]. Duda R O,Hart P E.Use of the hough transformation to detect lines and curves in pictures.Communications of the ACM,1972,15(1):11-15.
Cite this article
Meng,D.;Long,W.;Hu,L.;Jiang,L. (2024). Review on line detection of wood panel images. Advances in Engineering Innovation,5,24-32.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Journal:Advances in Engineering Innovation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. DAVIS A D,NOSEWORTHY M D. Motion and distortion correction of skeletal muscle echo planar images. Magnetic Resonance Imaging, 2016,21(7): 196-202.
[2]. HENG Hang jia, ZHONG Baojiang. Overview and evaluation of image straight line segment detection algorithms. Com-puter Engineering and Applications, 2019, 55(17) 9-19.
[3]. Micusik B,Wildenauer H.Descriptor free visual indoor localization with line segments//IEEE Conference on Computer Vision and Pattern Recognition,Boston,USA,2015: 3165-3173
[4]. Pumarola A,Vakhitov A,Agudo A,et al.PL- SLAM:real-time monocular visual SLAM with points and lines// IEEE Conference on Robotics and Automation,Singa-pore,2017: 4503-4508.
[5]. Zhou H,Zou D, Pei L, et al.Structslam: visual SLAM with building structure lines.IEEE Transactions on Vehicular Technology, 2015, 64(4): 1364-1375.
[6]. Bista S R,Giordano P R,Chaumette F.Appearance-based indoor navigation by IBVS using line segments. IEEE Robotics and Automation Letters, 2016, 1 (1) : 423-430.
[7]. Lian Lin, Li Guohui, Zhang Jun, et al. Automatic registration algorithm of infrared and visible images based on step-by-step parameter estimation. Acta electronica Sinica,2012,40(9): 1829-1838.
[8]. Xue N,Xia G S,Bai X,et al.Anisotropic-scale junction detection and matching for indoor images.IEEE Trans-actions on Image Processing,2018,27(1):78-91.
[9]. Wang L,Neumann U,You S.Wide-baseline image matching using line signatures//IEEE Conference on Computer Vision,Kyoto,Japan,2009:1311-1318
[10]. Kroeger T,Dai D,Gool L V.Joint vanishing point extraction and tracking//IEEE Conference on Computer Vision and Pattern Recognition,Boston,USA,2015:2449-2457
[11]. Lezama J,Grompone Von Gioi R,Randall G,et al.Finding vanishing points via point alignments in image primal and dual domains//IEEE Conference on Computer Vision and Pattern Recognition,Columbus,USA,2014:509-515
[12]. Yoo J H,Lee S W,Park S K,et al.A robust lane detection method based on vanishing point estimation using the relevance of line segments.IEEE Transactions on Intelligent Transportation Systems,2017,18(12):3254- 3266.
[13]. Ramalingam S,Brand M.Lifting 3d manhattan lines from a single image//IEEE International Conference on Computer Vision,Sydney,Australia,2013:497-504.
[14]. Sugiura T,Torii A,Okutomi M.3D surface reconstruction from point- and-line cloud//International Conference on 3D Vision,Lyon,France,2015:264-272.
[15]. Micusik B,Wildenauer H.Structure from motion with line segments under relaxed endpoint constraints.International Journal of Computer Vision,2016,124(1):65-79.
[16]. Miao qiguang, Weng Wenqi, Xu Pengfei. A new algorithm for water free bridge recognition in remote sensing images. Acta electronica Sinica,2011,39(7):1698-1701.
[17]. Tang Gefu,Xiao Zhifeng,Liu Qing,et al.A novel airport detection method via line segment classification and texture classification.IEEE Geoscience and Remote Sensing Letters,2015,12(12):2408-2412.
[18]. Budak U,Halici U,Sengur A,et al.Efficient airport detection using line segment detector and fisher vector representation[J].IEEE Geoscience and Remote Sensing Letters,2016,13(8):1079-1083.
[19]. Li Xuan, Liu Yunqing, Bian Chunjiang, et al. Detection of alongside ships in optical remote sensing images under local salient features. Chinese Journal of image and graphics,2016,21(5): 657-664.
[20]. Hofer M,Maurer M,Bischof H.Efficient 3d scene abstraction using line segments.Computer Vision and Image Understanding,2017,157:167-178.
[21]. Duda R O,Hart P E.Use of the hough transformation to detect lines and curves in pictures.Communications of the ACM,1972,15(1):11-15.