


Volume 161
Published on June 2025Volume title: Proceedings of CONF-MSS 2025 Symposium: Automation and Smart Technologies in Petroleum Engineering
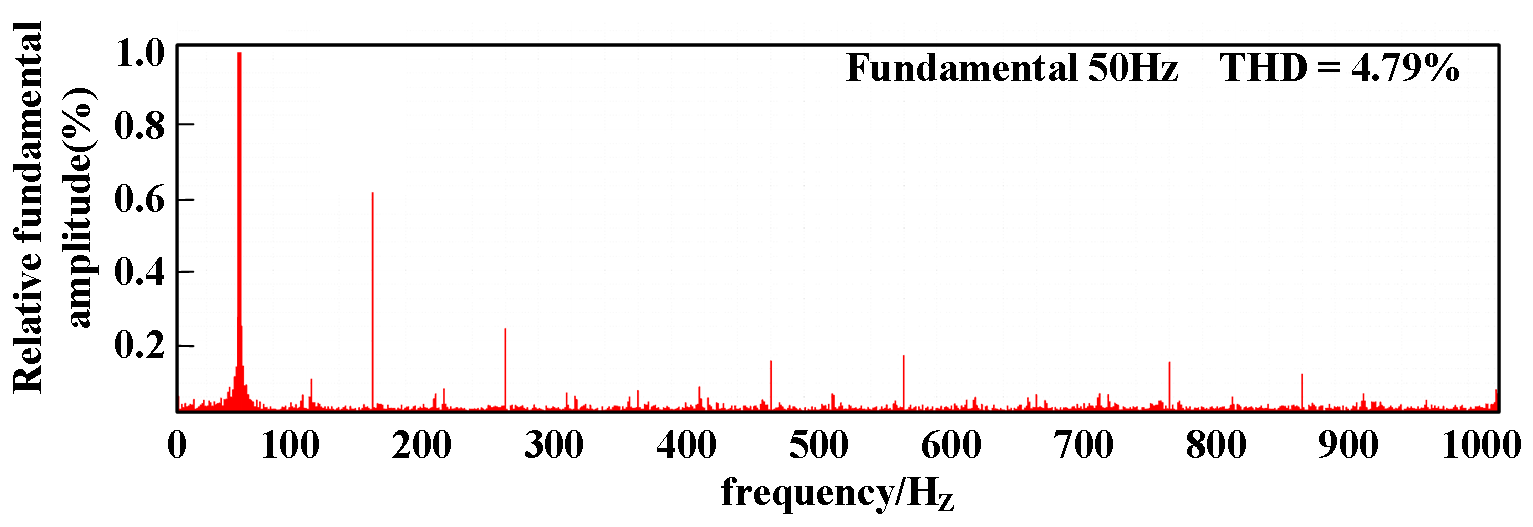
To address issues of lagging dynamic response and complex parameter tuning in traditional double-loop control of single-phase voltage source PWM rectifiers, this research proposes a hierarchical intelligent control strategy integrating reinforcement learning (RL). Firstly, the mathematical model in the d-q rotating coordinate system is established by analyzing the circuit topology of a single-phase VSR. Subsequently, a double-loop control structure comprising a voltage outer loop and a current inner loop is developed: the current inner loop adopts DQ feedforward decoupling control to achieve independent conditions; the voltage outer loop innovatively employs a single-neuron PI controller based on reinforcement learning, which optimizes control parameters in real-time via a deep deterministic policy gradient (DDPG) algorithm, thus forming an adaptive hierarchical control system. Finally, the effectiveness of the strategy is validated through simulation models built on the Matlab/Simulink platform. Simulation results demonstrate superior dynamic performance of the proposed method under load mutation conditions, significantly improving dynamic response quality and steady-state performance.



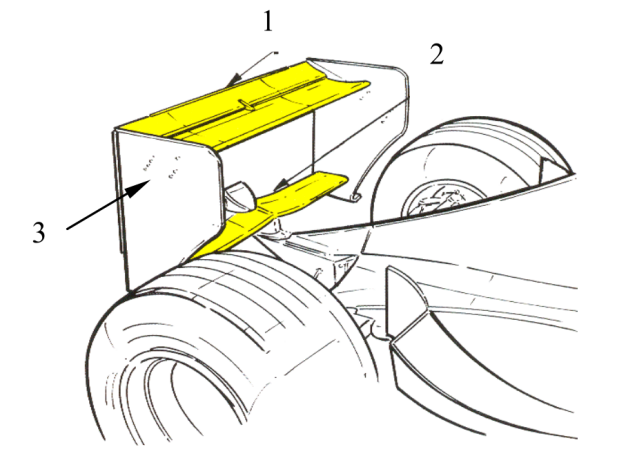
With the rise of motorsport in recent years, an increasing number of people have turn their attention to this sport. A racing competition is not just a contest of physical strength and strategy. More importantly, it involves the continuously innovative racing car technologies. These technologies not only have an impact on motorsport but also play a significant role in the design and innovation of civilian vehicles. The paper, through a method of literature review, explores the impact of the Drag Reduction System on Formula One cars under different conditions. The paper finds that a Drag Reduction System can improve the performance of a racing car. Specifically, it enhances the vehicle’s straight-line speed by reducing aerodynamic drag, which is particularly crucial in high-speed racing environments where every fraction of a second can make a difference. This improvement in speed not only makes overtaking maneuvers more feasible but also significantly enhances the competitiveness and spectacle of the races. Moreover, the study highlights the strategic importance of DRS in modern Formula One, where its use is governed by specific rules and regulations to ensure fair competition. The findings suggest that while DRS provides a significant performance boost, its effectiveness is contingent upon the driver’s skill and the car’s overall setup, making it a complex yet essential tool in the arsenal of Formula One teams.
The importance of underwater robots is evident in ocean exploration, resource development, and environmental monitoring. However, the harsh underwater environment requires higher efficiency, stability, and intelligence from their propulsion systems. The challenges faced by operational underwater robots today include low propulsion efficiency, poor adaptability to extreme environments, and a lack of sufficient autonomous control capabilities. To address these issues, this paper reviews the definition, requirements, core technologies, and key performance indicators of underwater robot propulsion systems by analyzing relevant literature from 2016 to 2024. It emphasizes optimization strategies aimed at enhancing propulsion efficiency, fault diagnosis and identification, reliability, durability, and adaptive control. Besides, it summarizes the current technical challenges and provides a reference for subsequent research. The results show that optimizing the propulsion system of operational underwater robots relies primarily on bionic design, new materials, adaptive control, deep learning, and fault diagnosis technologies to enhance propulsion efficiency, stability, durability, and environmental adaptability. However, optimizing the propulsion system involves challenges such as energy control, cost, and multi-objective optimization. Future research should prioritize efficient, low-energy propulsion, multi-modal perception, and intelligent adaptive control to advance underwater robot technology.
This study proposes a novel hybrid framework that integrates deep generative models and generalized linear models. Considering the limitation that generative models such as GAN and VAE can create realistic images but lack interpretation, we combine the statistical modeling capability of GLM with the abstract representation of deep learning by sharing the latent space. In the model architecture, the GLM branch ensures the consistency of the image structure, and the generative network is responsible for reconstructing semantic features. The two work collaboratively. The three types of random missing, center masking, and Gaussian noise degradation experiments conducted on the CelebA, cifar 10, and MNIST datasets show that this framework outperforms the single-model benchmark in terms of FID, PSNR, and SSIM metrics. Especially in medical imaging and cultural heritage restoration scenarios, the feature interpretation advantage provided by the GLM module is significant, and the influence of key parameters during the restoration process can be clearly traced. The experimental results confirm that the organic integration of statistical models and deep learning can not only improve the generation quality, but also open a new path for building reliable visual intelligence systems.