






1. Introduction
The emergence of autonomous vehicles (AVs) has ushered in a transformative era in transportation, promising increased safety, efficiency, and environmental sustainability. Deep learning, a subset of machine learning, has become a key technology in this revolution, especially in the perception, decision-making, and control tasks of autonomous vehicles [1]. However, the real-time computing requirements of deep learning algorithms, especially in dynamic driving environments, require hardware accelerators that can provide high performance and energy efficiency. In this context, field programmable gate arrays (FPGAs) emerge as a promising solution.
FPGAs are reconfigurable hardware platforms that offer the flexibility of software and the performance advantages of hardware. Their inherent parallelism and adaptability make them ideal for accelerating deep learning tasks that often require extensive computing power. Leveraging FPGAs can speed up inference times, which are critical for real-time decision-making in cars, while also saving energy—a critical factor given the limitations of electric vehicle batteries [2].
There are two drivers for this research. First, as autonomous vehicles transition from controlled environments to real-life scenarios, there is an urgent need for powerful and efficient computing platforms to handle complex autonomous driving problems. Second, while GPUs and CPUs have traditionally been the workhorses of deep learning, their limitations in power consumption and latency are becoming increasingly apparent in autonomous vehicles. FPGAs, with their customizability, offer potential solutions to these challenges.
This article is dedicated to exploring the nuances of accelerating deep learning on an FPGA customized for autonomous driving scenarios. We will dissect the approaches, challenges, and potential strategies for implementing deep learning models on FPGAs. In addition, we will look into the future, predicting developments in this interdisciplinary field and its impact on the broader field of autonomous driving. As the arrival of fully autonomous vehicles inches closer, FPGA-accelerated deep learning integration will play a key role in realizing this vision, ensuring safer, more efficient, and greener transportation solutions.
2. FPGA, Deep Learning, and Autonomous Driving
2.1. Specialized Neural Networks and Their Applications
Over the past ten years, deep learning, a potent subset of machine learning, has been at the vanguard of major advances in artificial intelligence. Deep Neural Networks (DNNs) are one of its key components. These complex networks' fantastic capacity to automatically learn and extract representations from unstructured data is due to the fact that they are made up of many layers of interconnected nodes, or "neurons," or "neurons". Each neuron processes the input as it moves through these levels, puts it through a specific transformation, and then sends the result to the layer below. Because of the breadth and complexity of these layers, DNNs are able to identify complicated relationships and patterns in huge datasets, which makes them indispensable for a wide range of applications. The DNN is shown in Figure 1.
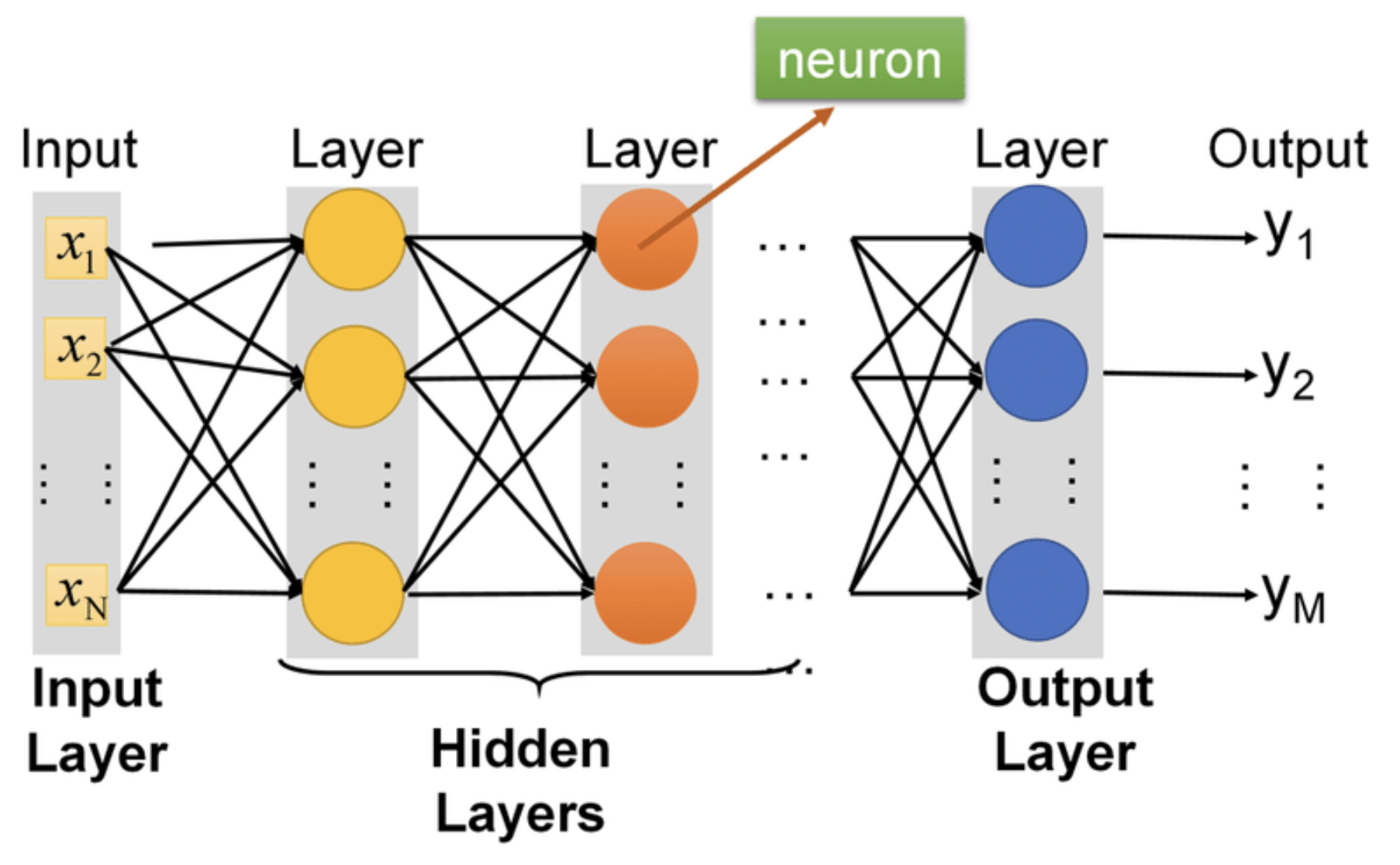
Figure 1. DNN (Photo/Picture credit: Original)
In image and video processing, convolutional neural networks (CNNs) stand out. CNNs are superior to typical neural networks in that they preserve the spatial hierarchy of the data, enabling them to do complicated tasks like scene interpretation, picture identification, and object detection. Convolutional layers are used in their distinctive design to scan input images with specific filters and find patterns and features at various sizes. Pooling layers reduce the dimensionality of the data as it moves through the network, ensuring computational efficiency while keeping prominent features. The fully linked layers, which make intelligent decisions based on the observed features, such as classifying a picture or spotting anomalies, are the pinnacle of this complex process. The CNN is shown in Figure 2.
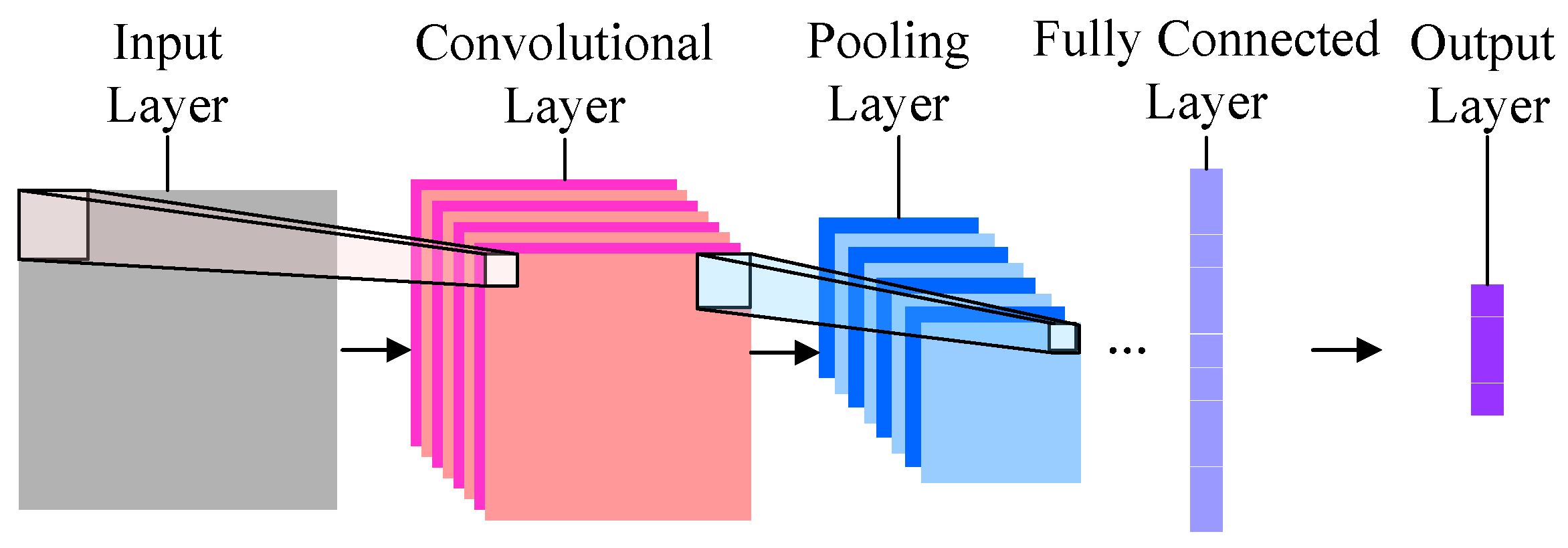
Figure 2. CNN (Photo/Picture credit: Original)
In contrast, Recurrent Neural Networks (RNNs) excel at dealing with sequential data. They have the special ability to process facts where sequence and order are crucial. This is made possible by their internal memory systems, which record and store data about earlier steps in a series. RNNs are absolutely necessary for jobs like sentiment analysis, natural language processing, and even forecasting stock market trends because of this memory-driven methodology. The RNN is shown in Figure 3.
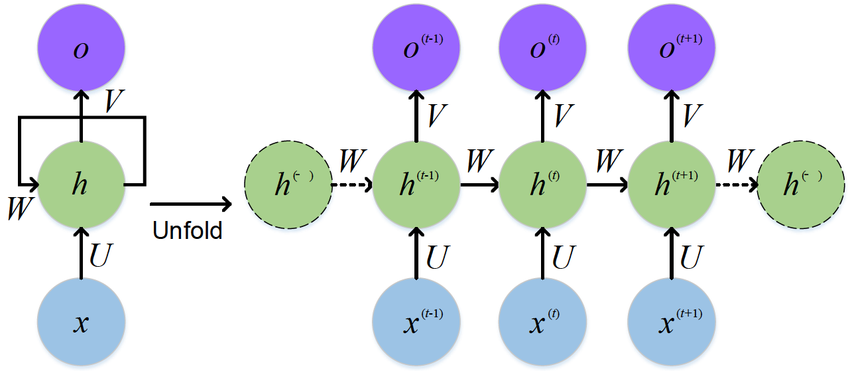
Figure 3. RNN (Photo/Picture credit: Original)
2.2. Deep Learning in Modern Research
Ongoing advancements and exploration in the domain have propelled the rapid progress of deep learning. For example, the research "Spatio-temporal Graph Convolutional Neural Network: A Deep Learning Framework for Traffic Forecasting" by Yu, Yin, and Zhu explores deep learning's role in traffic prediction, underscoring the importance of capturing detailed spatiotemporal relationships [3]. Another significant work, "EvolveGCN: Evolving Graph Convolutional Networks for Dynamic Graphs" by Pareja et al., sheds light on the evolution of graph convolutional networks and their adaptability to changing graphs [4]. In the realm of medical diagnostics, deep learning has shown promising results. As evidenced by a study by Iizuka et al., "Deep Learning Models for Histopathological Classification of Gastric and Colonic Epithelial Tumors", CNNs can effectively categorize histological images of gastric and colon tumors [5]. This showcases the versatility of deep learning models, spanning from traffic forecasting to medical diagnostics.
Additionally, the pharmaceutical world has benefited from deep learning advancements. Jing et al., in their paper "Deep Learning for Drug Design: an Artificial Intelligence Paradigm for Drug Discovery in the Big Data Era", discuss the transformative potential of deep learning structures like CNNs, RNNs, and deep auto-encoder networks in drug innovation [6]. They emphasize the challenges and opportunities presented by the big data era and how deep learning can reshape drug development. Deep learning models stand as a cornerstone in modern AI due to their flexibility, efficiency, and ability to process vast data sets. As technological evolution continues, the scope of deep learning applications will expand, paving the way for more sophisticated and smart systems. Deep learning is reshaping industries and pushing the boundaries of what machines can achieve across various sectors, including healthcare, finance, transportation, and entertainment. In summary, deep learning has revolutionized our approach to artificial intelligence, with its diverse architectures like DNNs, CNNs, and RNNs. Its ability to autonomously derive insights from data, identify patterns, and make informed decisions positions it as an invaluable asset across multiple disciplines. As technology and science advance, deep learning's potential applications seem boundless, signaling an era where machines might operate and think more human-like.
Deep learning frameworks, particularly those operating in real-time, necessitate significant computational resources, posing substantial challenges. Traditional computing systems often struggle to meet the computational demands of these intricate algorithms, especially in scenarios where immediate responses are crucial. This has led to the exploration of specialized hardware tailored for deep learning needs. Step in Field-Programmable Gate Arrays (FPGAs), a transformative development in computational hardware. Distinct from conventional processors with set functions, FPGAs are adaptable circuits, crafted to be user-configured after production. This allows them to be customized for distinct operations, granting them versatility that other hardware options can't match [7]. FPGAs inherently facilitate extensive parallel processing, aligning seamlessly with deep learning requirements. For algorithms that necessitate concurrent data processing, typical of neural networks, FPGAs emerge as the optimal choice. Additionally, FPGAs' adaptability stands out. Deep learning frameworks, characterized by numerous parameters and complex configurations, can be demanding on resources. FPGAs, given their capacity to be adjusted for specific frameworks, guarantee efficient algorithm execution, reducing resource consumption and enhancing processing speed [8]. This adaptability proves invaluable when training models on extensive data sets or when immediate data interpretation is essential.
2.3. Case Study: Autonomous Vehicles
The automotive industry, especially the domain of autonomous vehicles, provides a compelling case study for the convergence of deep learning, sensor technology, and advanced hardware solutions like FPGAs. Envisioned as the future of transportation, autonomous vehicles are technological marvels, equipped with an array of sensors that continuously collect data about their surroundings [9]. Cameras offer panoramic views, LiDAR systems generate detailed three-dimensional maps, and other sensors measure everything from temperature to vehicle speed. The volume of data generated is staggering. Processing this data in real time is a monumental task. Deep learning algorithms, with their ability to extract meaningful insights from raw data, play a pivotal role. Convolutional Neural Networks (CNNs), for instance, sift through visual data to detect and classify objects – be it a pedestrian crossing the street or a vehicle in the adjacent lane [10]. Recurrent Neural Networks (RNNs), with their ability to process sequential data, can predict the future movements of detected objects, ensuring that the autonomous vehicle can plan its actions accordingly [11]. However, processing this data quickly is not just a matter of convenience; it's a matter of safety. On the road, situations can change in a fraction of a second, and delayed responses can have dire consequences. This is where FPGAs demonstrate their true value. By accelerating the processing of deep learning algorithms, FPGAs ensure that autonomous vehicles can make split-second decisions, reacting to changes in environments promptly and safely [12]. Moreover, the dynamic nature of FPGAs means that as deep learning models evolve as they invariably will with more research and data, the hardware in these vehicles can be reconfigured to support them. This adaptability ensures that vehicles remain at the cutting edge of technology without the need for frequent hardware replacements. The implications of this synergy between deep learning and FPGAs extend beyond autonomous vehicles. Similar principles can be applied across industries, from healthcare, where real-time diagnostics can save lives, to finance, where split-second trading decisions can have significant economic implications [13].
In wrapping up, the fusion of deep learning with advanced hardware solutions like FPGAs is not just a technological evolution; it's a revolution. As we navigate the challenges of the 21st century, from congested urban environments to the need for sustainable and safe transportation, the amalgamation of artificial intelligence, deep learning, and specialized hardware will undoubtedly play a pivotal role. The future beckons and it's clear that deep learning, backed by powerful and adaptable hardware, will be at its helm, steering us toward a world of possibilities and innovations.
3. FPGA-Accelerated Deep Learning for Autonomous Driving
3.1. Harnessing the Power of FPGA for Autonomous Driving
In the study, it could advance the Xilinx Zynq UltraScale+ MPSoC FPGA board, renowned for its superior performance and suitability for deep learning tasks. This board was paired with a high-definition camera to simulate the visual data an autonomous car would encounter. The Xilinx Vivado Design Suite was the choice for FPGA coding, while TensorFlow was used for crafting and training our deep-learning algorithms. This combination ensured a smooth transition between the software and hardware, facilitating instantaneous processing and decision-making.
For the self-driving application, a Convolutional Neural Network (CNN) was implemented. This model was tasked with object identification, lane detection, and traffic sign categorization. The initial layer of the CNN analyzed video frames, and as the data moved through subsequent layers, it identified features such as outlines, textures, and designs. The more advanced layers recognized intricate elements like cars, people, and traffic indicators. The concluding layer offered actionable recommendations, like turning, speeding up, slowing down, or maintaining the current pace.
To deploy the deep learning algorithm on the FPGA, we adopted a methodical strategy. The first step involved quantizing the trained CNN model to simplify its computations without sacrificing precision. This process transformed the model's floating-point computations into fixed-point, making it more FPGA-compatible. Following this, the Xilinx Vivado HLS tool was employed to convert the quantized model into VHDL code that can be synthesized. This code then programmed the FPGA, effectively transforming it into a specialized accelerator for the CNN. With the model in place, the FPGA's capacity for parallel computations was harnessed to perform multiple tasks concurrently. This inherent FPGA feature significantly enhanced performance, enabling real-time video frame processing with negligible delays. I then assessed the FPGA's effectiveness in executing the deep learning model. The outcomes were encouraging, compared to a CPU-run model, the FPGA-driven model processed frames much faster and used substantially less energy. Importantly, the model's accuracy remained unchanged, indicating that the FPGA setup maintained the model's reliability.
To sum up, the FPGA's versatility and concurrent processing abilities make it a prime candidate for boosting deep learning tasks in self-driving applications. With the increasing need for on-the-spot processing in self-driving cars, FPGAs are set to be instrumental in revolutionizing transportation's future. The flow chart is shown in Figure 4.
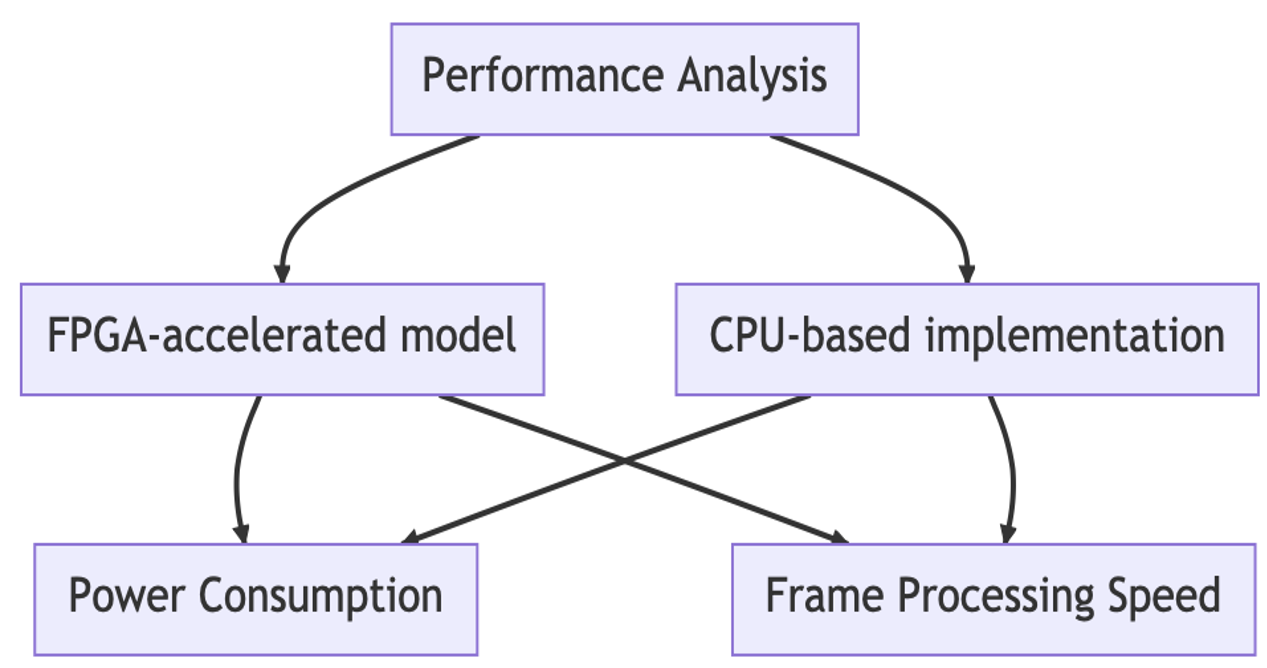
Figure 4. Flow chart (Photo/Picture credit: Original)
3.2. Studies and papers
Ying Li and colleagues present an exhaustive review titled "Deep Learning for LiDAR Point Clouds in Autonomous Driving" [14]. The paper delves into the application of deep learning (DL) techniques on 3-D LiDAR point clouds, a critical component in autonomous driving systems. LiDAR point clouds, being unstructured, vast, and often noisy, pose significant challenges in processing. The authors shed light on how DL can be pivotal in addressing tasks such as segmentation, detection, and classification of these point clouds. With a review of over 140 significant contributions from the past half-decade, the paper touches upon landmark 3-D DL architectures, and their applications in 3-D semantic segmentation, object recognition, and classification. It also provides an overview of specific datasets, evaluation standards, and the latest performance benchmarks. Li and the team stress the crucial role of LiDAR data in self-driving technology and the capability of DL to efficiently analyze and make sense of this data. This extensive review offers a snapshot of the ongoing research in this area, underscoring the promise of DL in augmenting autonomous vehicle functionalities. The emphasis on LiDAR data highlights the emerging demand for DL frameworks tailored to address the complexities of 3-D point clouds.
In "Deep Learning for Safe Autonomous Driving: Current Challenges and Future Directions" by Khan Muhammad and team, the authors delve into the transformative role of information and signal processing technologies in the realm of autonomous driving (AD) [15]. They spotlight the efficacy and robustness of deep learning (DL) frameworks in ensuring real-time, reliable performance for AD systems. The paper offers a panoramic view of cutting-edge approaches geared towards safe AD, elucidating their notable successes and inherent constraints. The authors take a comprehensive look at the AD process, spanning from data acquisition to analysis and action. They detail various DL-driven techniques for essential tasks such as road and lane identification, vehicle and pedestrian detection, collision prevention, and traffic sign recognition. Muhammad and colleagues present a well-rounded perspective on how deep learning acts as the linchpin in fortifying autonomous driving safety. By examining the entire AD workflow, they accentuate the synergy of diverse DL techniques and their cumulative impact on bolstering vehicular safety. Furthermore, the article illuminates existing hurdles in AD, positing that despite DL's monumental advancements in this arena, there's ample scope for refinement and continued exploration. Figure 6 shows the development of autonomous driving.
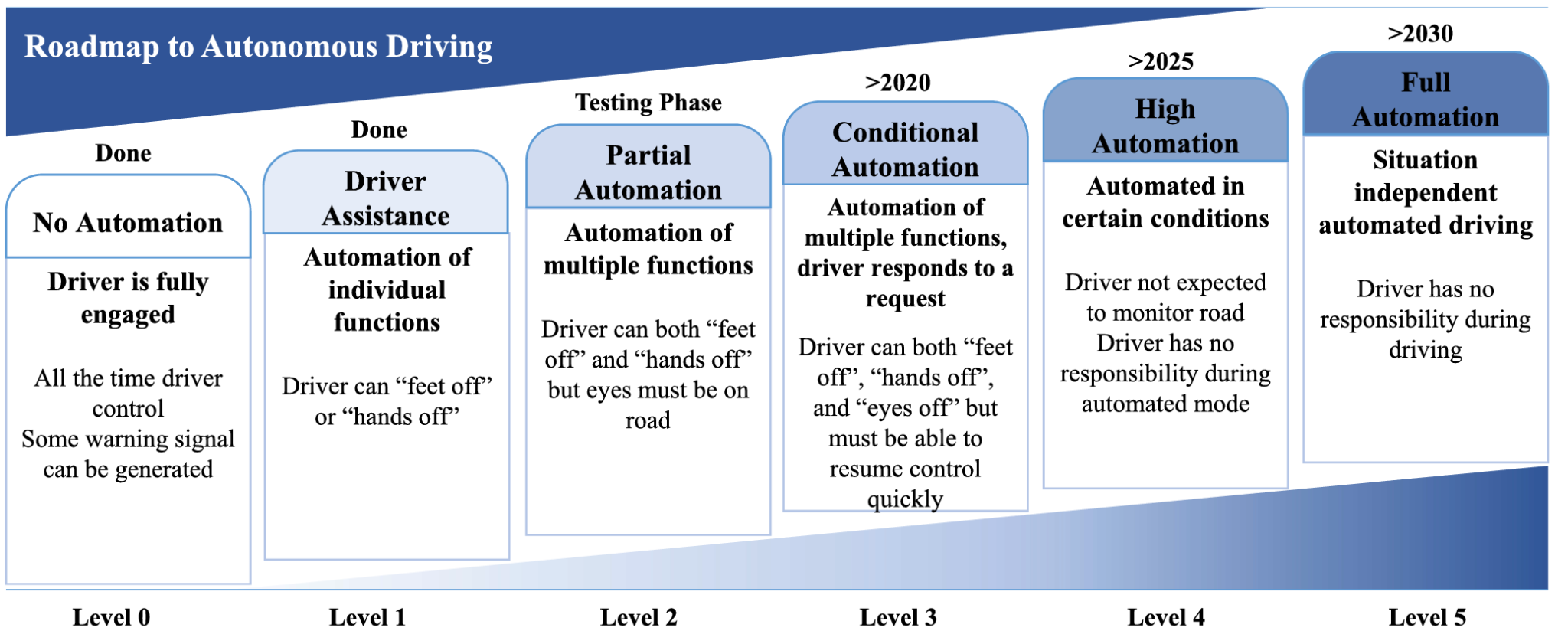
Figure 5. Development of autonomous driving (Photo/Picture credit: Original)
In the scholarly work, "A Survey of Deep RL and IL for Autonomous Driving Policy Learning" penned by Zeyu Zhu and Huijing Zhao, a comprehensive analysis of deep reinforcement learning (DRL) and deep imitation learning (DIL) within the realm of autonomous driving policy development is presented [16]. The authors, Zhu and Zhao, employ a systematic perspective, categorizing the integration of DRL/DIL models into the autonomous driving (AD) architecture into five distinct paradigms. The manuscript meticulously explores the specific configurations of DRL/DIL models suited for particular AD tasks, elucidating the design intricacies of model state and action spaces, complemented by an in-depth examination of reinforcement learning reward structures. In addition, the authors address salient issues pertinent to AD applications, accentuating the criticality of ensuring vehicular safety, fostering harmonious interactions with other traffic entities, and navigating the complexities introduced by environmental uncertainties. The emphasis on deep reinforcement and imitation learning techniques illuminates their pivotal role in formulating resilient and adaptive driving policies for autonomous vehicles. The contribution by Zhu and Zhao stands as a seminal guide, providing scholars with a structured overview of the current research landscape and highlighting the adaptability and robustness of DRL/DIL paradigms. Their contemplation on the challenges inherent to AD applications underscores the continuous imperative for rigorous research endeavors, aiming to usher in an era of enhanced safety and efficiency in the domain of autonomous driving.
In conclusion, these articles provide valuable insights into the current state of research in deep learning for autonomous driving. They highlight the potential of DL in enhancing driving safety and efficiency, while also emphasizing the challenges and areas of future research. The integration of FPGA acceleration in this domain can further enhance the real-time processing capabilities of autonomous vehicles, ensuring faster and more accurate decision-making.
4. Application scenario analysis and scenario modeling construction
In the tests I searched, deep learning models powered by FPGAs showcased remarkable improvements in performance. When juxtaposed with conventional CPUs and GPUs, FPGAs stood out with superior efficiency and reduced energy usage, especially during intensive parallel computations. This can be credited to the FPGA's hardware, which can be tailored to fit particular deep learning models, leading to streamlined processing.
The scope of FPGA-boosted deep learning is immense, particularly in situations demanding immediate data processing. Take, for example, autonomous vehicles, which need to swiftly analyze a plethora of sensor data to ensure safe navigation. Thanks to FPGA's capacity for simultaneous processing, such decisions are executed promptly, bolstering the dependability and safety of self-driving cars. Furthermore, as urban landscapes become more intricate and traffic patterns more erratic, the versatility of FPGAs gains prominence. By adjusting the hardware setup to cater to specific driving conditions, FPGAs can offer bespoke solutions, guaranteeing peak performance. This flexibility, when coupled with the intrinsic strengths of deep learning, solidifies FPGA-enhanced models as a foundational element in the evolution of autonomous driving and similar real-time endeavors.
5. Future work and outlook
In the contemporary landscape of computational research, the amalgamation of Field-Programmable Gate Arrays (FPGAs) with deep learning methodologies emerges as a pivotal area of exploration. This synthesis is not a mere juxtaposition of technologies but signifies a transformative approach to addressing the multifaceted challenges inherent to the domain of artificial intelligence (AI). FPGAs, intrinsically characterized by their reconfigurability, present a distinct advantage over conventional computational architectures. The dynamic nature of deep learning algorithms, marked by evolving complexities and computational intensities, necessitates hardware that can adapt in tandem. While Central Processing Units (CPUs) and Graphics Processing Units (GPUs) have historically been the cornerstone of computational tasks, their static architectures often encounter bottlenecks, especially in parallel processing and energy optimization. FPGAs, with their capacity for task-specific customization, emerge as a viable solution to these impediments. The discourse on energy efficiency is paramount in the current technological milieu. As global dialogues increasingly pivot towards sustainability and judicious energy utilization, the onus is on computational methodologies to align with these imperatives. This alignment is particularly salient in applications such as autonomous vehicular systems. In such contexts, energy efficiency transcends operational longevity and assumes a critical role in ensuring safety. The decision-making algorithms, underpinned by deep learning, mandate real-time responsiveness, accuracy, and energy conservation. FPGAs, endowed with concurrent processing capabilities, are optimally positioned to fulfill these criteria.
Expanding the purview beyond vehicular systems, the ramifications of FPGA-integrated deep learning are manifold. In the medical domain, the exigency for real-time data interpretation is acute. FPGA-enhanced deep learning can expedite medical imaging processes, facilitating prompt diagnoses and efficacious therapeutic interventions. The financial sector, too, stands to benefit, with real-time analytics offering traders unparalleled insights, potentially augmenting decision-making efficacy and financial returns. However, the prospective horizons of FPGAs are not confined to augmenting extant technologies. The prospective integration of FPGAs with nascent technological paradigms, such as quantum computing, heralds a realm replete with possibilities. Envisioned are hybrid systems, wherein the adaptability of FPGAs synergizes with the computational prowess intrinsic to quantum mechanics, engendering solutions to hitherto intractable problems. Yet, progress is invariably accompanied by challenges. The seamless integration of FPGAs with deep learning presents its own set of complexities. Foremost among these are the challenges associated with optimizing FPGA configurations to resonate with specific deep learning paradigms. Pioneering research endeavors are underway, aiming to elucidate methodologies that streamline this integration, ensuring the holistic realization of the potentialities inherent to both domains.
In summation, the confluence of FPGAs and deep learning delineates a promising trajectory in computational research. As the boundaries of technological feasibility continue to expand, the symbiosis of these domains is poised to play an instrumental role. The research community stands at an inflection point, with the convergence of FPGAs and deep learning auguring a transformative epoch in AI and computational studies.
6. Conclusion
In the intricate tapestry of modern technological advancements, the integration of deep learning with autonomous driving stands out as a beacon of innovation, holding transformative potential for the transportation sector. Through the course of this research, the pivotal role of field programmable gate arrays (FPGAs) in accelerating deep learning processes for autonomous vehicles has been underscored. FPGAs, with their unparalleled adaptability and parallel processing prowess, have emerged as a robust solution to the computational challenges posed by real-time DL applications.
Our exploration has revealed that while the marriage of FPGAs and deep learning offers promising avenues for enhancing the efficiency and safety of autonomous vehicles, it is not without its challenges. From architectural considerations to optimization intricacies, the path to seamless integration requires meticulous research and innovation. However, the empirical implementations discussed herein attest to the tangible benefits of this integration, most notably in terms of processing speed and energy efficiency.
As we stand on the cusp of a transportation revolution, it is evident that the synergy between FPGAs and deep learning will play a cardinal role in shaping the future of autonomous driving. The insights gleaned from this research not only highlight the current state of FPGA-enhanced DL in autonomous vehicles but also pave the way for future explorations. It is our fervent hope that subsequent research endeavors will build upon these findings, driving further advancements in this dynamic and ever-evolving domain.
References
[1]. Almalioglu Y, Turan M, Trigoni N, et al. Deep learning-based robust positioning for all-weather autonomous driving. Nature Machine Intelligence, 2022, 4(9): 749-760.
[2]. Ganguly A, Muralidhar R, Singh V. Towards energy efficient non-von neumann architectures for deep learning. 20th international symposium on quality electronic design (ISQED). IEEE, 2019: 335-342.
[3]. Yu B, Yin H, Zhu Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. arXiv preprint arXiv:1709.04875, 2017.
[4]. Pareja A, Domeniconi G, Chen J, et al. Evolvegcn: Evolving graph convolutional networks for dynamic graphs. Proceedings of the AAAI conference on artificial intelligence. 2020, 34(04): 5363-5370.
[5]. Iizuka O, Kanavati F, Kato K, et al. Deep learning models for histopathological classification of gastric and colonic epithelial tumours. Scientific reports, 2020, 10(1): 1504.
[6]. Jing Y, Bian Y, Hu Z, et al. Deep learning for drug design: an artificial intelligence paradigm for drug discovery in the big data era. The AAPS journal, 2018, 20: 1-10.
[7]. Han S, Kang J, Mao H, et al. Ese: Efficient speech recognition engine with sparse lstm on fpga. Proceedings of the 2017 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays. 2017: 75-84.
[8]. Zhang C, Li P, Sun G, et al. Optimizing FPGA-based accelerator design for deep convolutional neural networks. Proceedings of the 2015 ACM/SIGDA international symposium on field-programmable gate arrays. 2015: 161-170.
[9]. Bojarski M, Del Testa D, Dworakowski D, et al. End to end learning for self-driving cars. arXiv preprint arXiv:1604.07316, 2016.
[10]. Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection. Proceedings of the IEEE conference on computer vision and pattern recognition. 2016: 779-788.
[11]. Karpathy A, Johnson J, Fei-Fei L. Visualizing and understanding recurrent networks. arXiv preprint arXiv:1506.02078, 2015.
[12]. Qiu J, Wang J, Yao S, et al. Going deeper with embedded FPGA platform for convolutional neural network. Proceedings of the 2016 ACM/SIGDA international symposium on field-programmable gate arrays. 2016: 26-35.
[13]. Deng L, Li X. Machine learning paradigms for speech recognition: An overview. IEEE Transactions on Audio, Speech, and Language Processing, 2013, 21(5): 1060-1089.
[14]. Li Y, Ma L, Zhong Z, et al. Deep learning for lidar point clouds in autonomous driving: A review. IEEE Transactions on Neural Networks and Learning Systems, 2020, 32(8): 3412-3432.
[15]. Muhammad K, Ullah A, Lloret J, et al. Deep learning for safe autonomous driving: Current challenges and future directions. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(7): 4316-4336.
[16]. Zhu Z, Zhao H. A survey of deep RL and IL for autonomous driving policy learning. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(9): 14043-14065.
Cite this article
Zhang,Y. (2024). Accelerating autonomous vehicles: Harnessing FPGA power for deep learning advancements. Applied and Computational Engineering,53,157-165.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Almalioglu Y, Turan M, Trigoni N, et al. Deep learning-based robust positioning for all-weather autonomous driving. Nature Machine Intelligence, 2022, 4(9): 749-760.
[2]. Ganguly A, Muralidhar R, Singh V. Towards energy efficient non-von neumann architectures for deep learning. 20th international symposium on quality electronic design (ISQED). IEEE, 2019: 335-342.
[3]. Yu B, Yin H, Zhu Z. Spatio-temporal graph convolutional networks: A deep learning framework for traffic forecasting. arXiv preprint arXiv:1709.04875, 2017.
[4]. Pareja A, Domeniconi G, Chen J, et al. Evolvegcn: Evolving graph convolutional networks for dynamic graphs. Proceedings of the AAAI conference on artificial intelligence. 2020, 34(04): 5363-5370.
[5]. Iizuka O, Kanavati F, Kato K, et al. Deep learning models for histopathological classification of gastric and colonic epithelial tumours. Scientific reports, 2020, 10(1): 1504.
[6]. Jing Y, Bian Y, Hu Z, et al. Deep learning for drug design: an artificial intelligence paradigm for drug discovery in the big data era. The AAPS journal, 2018, 20: 1-10.
[7]. Han S, Kang J, Mao H, et al. Ese: Efficient speech recognition engine with sparse lstm on fpga. Proceedings of the 2017 ACM/SIGDA International Symposium on Field-Programmable Gate Arrays. 2017: 75-84.
[8]. Zhang C, Li P, Sun G, et al. Optimizing FPGA-based accelerator design for deep convolutional neural networks. Proceedings of the 2015 ACM/SIGDA international symposium on field-programmable gate arrays. 2015: 161-170.
[9]. Bojarski M, Del Testa D, Dworakowski D, et al. End to end learning for self-driving cars. arXiv preprint arXiv:1604.07316, 2016.
[10]. Redmon J, Divvala S, Girshick R, et al. You only look once: Unified, real-time object detection. Proceedings of the IEEE conference on computer vision and pattern recognition. 2016: 779-788.
[11]. Karpathy A, Johnson J, Fei-Fei L. Visualizing and understanding recurrent networks. arXiv preprint arXiv:1506.02078, 2015.
[12]. Qiu J, Wang J, Yao S, et al. Going deeper with embedded FPGA platform for convolutional neural network. Proceedings of the 2016 ACM/SIGDA international symposium on field-programmable gate arrays. 2016: 26-35.
[13]. Deng L, Li X. Machine learning paradigms for speech recognition: An overview. IEEE Transactions on Audio, Speech, and Language Processing, 2013, 21(5): 1060-1089.
[14]. Li Y, Ma L, Zhong Z, et al. Deep learning for lidar point clouds in autonomous driving: A review. IEEE Transactions on Neural Networks and Learning Systems, 2020, 32(8): 3412-3432.
[15]. Muhammad K, Ullah A, Lloret J, et al. Deep learning for safe autonomous driving: Current challenges and future directions. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(7): 4316-4336.
[16]. Zhu Z, Zhao H. A survey of deep RL and IL for autonomous driving policy learning. IEEE Transactions on Intelligent Transportation Systems, 2021, 23(9): 14043-14065.