






1. Introduction
Massage robots, as innovative therapeutic devices, have garnered significant attention and application due to technological advancements and society's increasing focus on wellness. However, amidst this progress, gaps persist in fully understanding their capabilities and optimizing their functionalities, highlighting the need for further research in this domain. This paper focuses on exploring the intricate technical principles, mechanical structure, sensing technology, and intelligent control systems of massage robots, with the aim of providing both theoretical foundations and practical insights for researchers and practitioners in this field. Specific inquiries encompass the elucidation of working principles, emulation of human massage techniques, mechanical design considerations, applications of sensor technology, and implementations of intelligent control systems within massage robots. Employing a blend of literature review, comparative analysis, and experimental validation, this study aims to not only deepen our understanding of massage robot functionality but also contribute to the advancement and refinement of this technology, fostering innovation and growth within the industry.
2. Technical Principles
2.1. Working Principles of Massage Robots
The working principles of massage robots are based on highly integrated advanced sensor technology and intelligent control systems. Sensor technology encompasses various types of sensors, including but not limited to pressure sensors, force feedback sensors, visual sensors, and temperature sensors. These sensors play a crucial role throughout the massage process, providing real-time feedback on the user's body condition, muscle tension, and skin response, thus supplying necessary input data to the intelligent control system. The intelligent control system comprises carefully designed control algorithms and feedback mechanisms. Recent studies have proposed improved reciprocating path planning algorithms, offering new insights for optimizing intelligent control systems [1]. Real-time analysis and processing of sensor data enable precise control over massage movements and intensity. The selection of control algorithms depends on the functionalities and characteristics required by the massage robot, with common algorithms including PID control, fuzzy logic control, and neural network control. These algorithms not only achieve basic massage actions but also adaptively adjust based on user's personalized needs and feedback, providing more personalized and effective massage services.
2.2. Simulating Human Massage Techniques
Massage robots simulate human massage techniques, including kneading, rubbing, and tapping, through advanced algorithms and technologies. The application of algorithms and technologies allows massage robots to switch between different massage modes and personalize massages based on the user's body features and preferences. For example, considering the muscle tension and sensitivity in different body areas, massage robots can adjust massage intensity and frequency, achieve precise positioning, and provide a high-quality massage experience.
Regarding the accuracy of massage positioning, researchers have developed a magnetic field intensity-based target automatic positioning system [2]. This system consists mainly of soft magnets, linear magnetic sensors, data acquisition and processing modules, three-axis motion modules, and control software. With this system, massage robots can quickly and accurately reach target points, with a positioning error of no more than 5mm, ensuring the accuracy of massage positioning.
Furthermore, massage robots possess self-learning and adaptive adjustment capabilities. Through continuous user feedback and data analysis, massage algorithms and technologies are continually optimized, enhancing massage effectiveness and user satisfaction. This personalized service and intelligent adjustment enable massage robots to better meet users' massage needs, providing a massage experience that aligns with ergonomic and physiological principles.
3. Mechanical Structure
The mechanical structure design of massage robots is one of the key factors in achieving their functionalities. Compared to traditional massage devices, the mechanical structure of massage robots must consider more complex motion and force control to simulate human massage techniques and provide a more personalized massage experience. Therefore, the design of the mechanical structure needs to integrate artificial intelligence technology to achieve higher levels of massage precision and user experience.
3.1. Massage Head Design
The design of the massage head is one of the core components in the mechanical structure of massage robots. The functionality of traditional massage device heads is relatively limited, restricting the diversity and personalization of massage techniques. However, by introducing the design of the RBT-6T/S03S type 6-degree-of-freedom industrial robot's actuator, combined with techniques such as robot position inverse solution and joint angle expression affecting the robot's workspace, various massage techniques can be realized, including kneading, rubbing, and light tapping. Moreover, it can adaptively adjust based on the user's massage preferences and body condition [3]. This design not only enhances the massage precision of the massage robot but also provides users with a more personalized massage experience. Figure 1 shows the machine-level kinematics of the hybrid manipulator, where the main joint markings are labeled as shoulder, elbow, and wrist joint origins, and the six joint axes are labeled as DOF j (where j is a number from 1 to 6) [4].
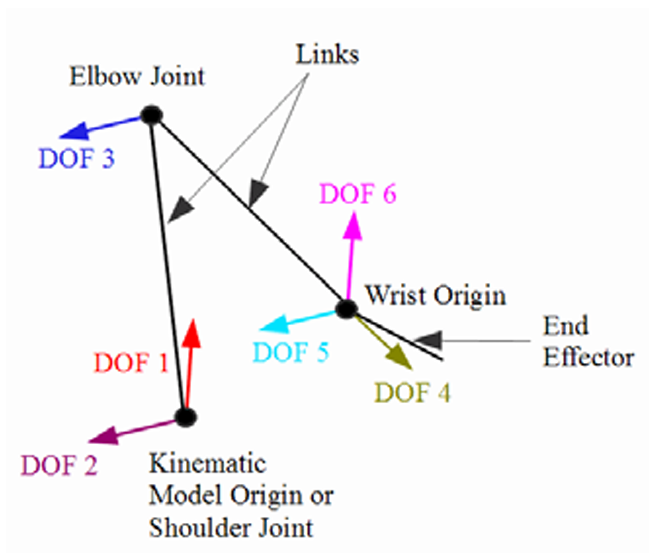
Figure 1. Simplified Kinematic Model
3.2. Transmission Device Optimization
The transmission device plays a crucial role in the mechanical structure of massage robots. The single transmission structure of traditional massage devices limits the flexibility and precision of massage techniques. However, by introducing the design concept of a multi-joint, multi-finger kneading massage mechanical hand, combined with intelligent control algorithms and optimization of multi-axis transmission systems, massage robots can achieve more flexible and precise massage movements. For example, using chain drive as the main transmission method, the massage intensity can be adjusted to more than 5kg. At the same time, based on the arm's design freedom, an outward-guided silent chain is used, and three independent motors are employed to achieve the arm's three degrees of freedom. The allocation of arm degrees of freedom is shown in Figure 2 [5]. These optimization measures not only enable massage robots to simulate more complex and detailed massage techniques, meeting the massage needs of different body parts, but also enhance the therapeutic effect and precision of massage.
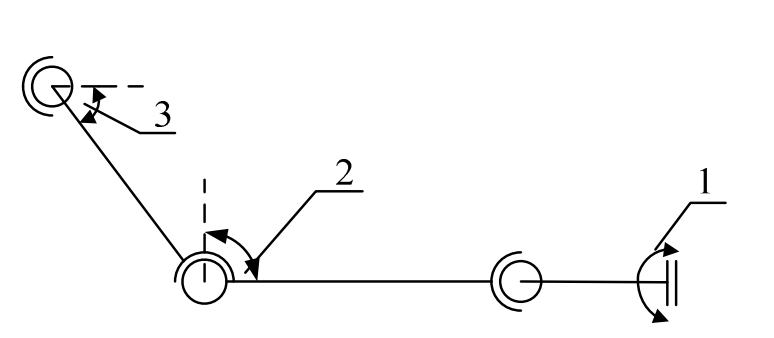
Figure 2. The allocation of degree of freedom (1. the wrist rotation; 2. the forearm pitching; 3. the big arm pitching)
4. Perception Technology
4.1. Visual Recognition Technology
Visual recognition technology plays a significant role in massage robots, capturing real-time body postures and skin features of users through cameras or other visual sensors to adjust massage intensity and position. Research has shown that advanced deep learning algorithms and neural network models can accurately identify key points of the human body, thereby precisely locating massage areas and providing personalized massage services [6][7]. For example, body posture recognition technology based on Convolutional Neural Networks (CNN) can rapidly and accurately identify the user's spinal curve and muscle tension distribution, thus providing customized massage solutions for massage robots.
In addition to deep learning algorithms, new visual recognition technologies are being explored to enhance the functionality of massage robots. Addressing the challenge of acupoint localization, Sun Kailai, Zhao Qianchuan, and others introduced QR codes as a convenient and effective acupoint recognition method. This method involves printing QR codes on A4 paper in a 1x1 cm ratio and using cameras to capture and recognize QR codes. To improve accuracy, they designed a new QR code specifically for acupoint localization and proposed a new QR code detection and recognition algorithm combined with CRC checksum functionality. Experimental results showed that the algorithm can control the depth measurement error within ±1.7 millimeters and the horizontal distance measurement error within ±0.8 millimeters, validating the effectiveness of the algorithm[8].
Furthermore, Fei Honglin and others mentioned the process of transforming the traditional Chinese medicine therapy technology of nationally renowned traditional Chinese medicine experts into Chinese medicine meridian massage robots[9]. This process includes robot force control technology, 3D visual recognition technology, artificial intelligence-assisted positioning technology, and voice interaction technology. This transformation process not only mentions the application of visual recognition technology but also involves the integration of other key technologies to achieve personalized massage services and inherit the traditional Chinese medicine characteristic techniques.
These research and practical results indicate the significant importance of visual recognition technology in the field of massage robots, providing users with more precise and personalized massage experiences, thereby promoting the inheritance and innovation of traditional Chinese medicine therapeutic culture.
4.2. Force Feedback Technology
While researching visual recognition technology, tactile sensing technology is also an indispensable part of massage robots. Tang Chen discussed the key technologies and applications of magneto-rheological elastomer (MRE) tactile sensors in his study, emphasizing their potential in enhancing robot tactile capabilities [10]. This research provides valuable insights into improving the tactile feedback capabilities of massage robots, aligning with the development trend of intelligent and adaptive robot systems.
In recent years, tactile sensing technology has been widely applied and studied in the field of massage robots. For example, utilizing flexible sensor technology and pressure sensors, massage robots can monitor real-time feedback signals from the user's body, including muscle relaxation, comfort perception, etc., and achieve intelligent massage adjustments through feedback control algorithms. Additionally, by integrating principles of ergonomics and physiological characteristics, specialized massage techniques and modes can be designed to provide a massage experience that is more in line with ergonomics.
In addition to the application of single sensors, the integration of multi-sensor fusion technology can be considered, such as visual recognition, voice recognition, etc., to combine information from different sensors for more comprehensive and accurate tactile perception and massage adjustments. For example, combining visual recognition technology can help determine the user's emotional state based on facial expressions and body language, thereby adjusting the massage method and intensity to enhance the comfort and effectiveness of the massage experience.
5. Intelligent Control System
5.1. Design Principles
The intelligent control system plays a crucial role in massage robots, aiming to achieve precise control of the massage process and optimize the user experience. The design principles of this system include real-time monitoring, learning capabilities, and adaptive adjustments.
Firstly, the intelligent control system monitors massage parameters such as intensity, frequency, and range in real-time through sensor technology and feeds the data back to the control system, enabling real-time monitoring and adjustment of the massage process. According to research by Liu Rongxin, this real-time monitoring can achieve high accuracy and precision in acupoint coordinates through HRNet and PFLD acupoint recognition deep learning networks, thereby achieving precise adjustments of massage intensity and range [11].
Secondly, the system has learning capabilities and can gradually learn and optimize massage modes and parameter settings based on user feedback and preferences using machine learning algorithms. Lastly, the system also has adaptive adjustment capabilities, automatically adjusting massage parameters such as intensity and frequency according to changes in the user's body condition and needs, thus providing personalized massage services.
5.2. Control Algorithm Selection and Optimization
The selection and optimization of control algorithms in the intelligent control system are crucial for achieving precise massage. Common control algorithms include PID control, fuzzy control, and neural network control. When choosing and optimizing control algorithms, the specific requirements of the massage robot and user experience need to be considered.
In addition to common control algorithms such as PID control, fuzzy control, and neural network control, advanced algorithms can be introduced to optimize the control effectiveness of massage robots. For example, according to research by Zhai Jingmei and Lu Dongwei, to address the problem of personalized differences in the appearance of massage robot operation targets, the Dynamic Movement Primitives (DMPs) model can be introduced to generalize posture and force trajectories [12]. This optimization teaching strategy can enhance learning capabilities and achieve more precise massage effects by integrating multiple massage information, such as Gaussian mixture regression. Experimental results show significant effects in reducing average position and posture errors, providing new ideas and methods for the selection and optimization of massage robot control algorithms.
Through the selection and optimization of control algorithms, the intelligent control system can better meet the massage needs of users, enhancing the overall performance and user experience of massage robots.
6. Conclusion
Through techniques such as machine learning and deep learning, massage robots can automatically adjust massage intensity, frequency, and techniques based on user feedback and preferences, thereby providing personalized massage services. This personalized service not only enhances user experience but also better meets the diverse health needs of different users. Therefore, the autonomous learning capability of AI will become a key factor in the development of massage robots. In addition, the integration of massage robots with virtual reality (VR) and augmented reality (AR) technologies will open up new application scenarios. By combining with VR technology, users can enjoy massage services in a virtual environment, enhancing relaxation effects both physically and mentally. Integration with AR technology enables real-time monitoring and analysis of user's physical condition, providing more accurate massage solutions and recommendations for massage robots. Furthermore, with the continuous evolution of AI technology, massage robots will play a greater role in the healthcare field. In long-term care and elderly care, massage robots can serve as important auxiliary tools, relieving physical fatigue and discomfort for individuals with prolonged bed rest or limited mobility.
In conclusion, with the continuous progress and application of artificial intelligence (AI) technology, massage robots will witness a trend towards diversification and personalization in the future. However, concurrently, there is a need to strengthen research on the safety, privacy protection, and human-machine interaction of massage robots, ensuring that they can maximize benefits in future applications and contribute to the enhancement of human health and quality of life.
References
[1]. W. Wang, L. He, Q. Jiang, P. Zhang and Y. Shi, "Path planning algorithm of a novel massage robot," 2016 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 2016, pp. 1670-1674, doi: 10.1109/CISP-BMEI.2016.7852984.
[2]. Qiao Peng, Lu Yu, Bai Qingyuan, et al. Design of Target Point Automatic Localization System for Robotic Massage[J]. Journal of Jiamusi University (Natural Science Edition), 2023, 41(04): 22-27.
[3]. Gao Hongwei, Wei Hongbo, Lu Kaijiang. Kinematics Study of Tuina Massage Rehabilitation Robot Based on Six-Joint Mechanical Arm[J]. Journal of Baoji University of Arts and Sciences (Natural Science Edition), 2023, 43(04): 35-39+46. DOI: 10.13467/j.cnki.jbuns.2023.04.007.
[4]. Shaik A A, Tlale N S, Bright G. A new hybrid machine design for a 6 DOF industrial robot arm[J]. International Journal of Intelligent Systems Technologies and Applications, 2012, 11(1-2): 63-80.
[5]. Wang Z L, Liang Q, Zhang B C. Structural design of the robot arm for massage based on the chain drive[J]. Advanced Materials Research, 2013, 605: 1547-1551.
[6]. R. C. Luo, S. Y. Chen and K. C. Yeh, "Human body trajectory generation using point cloud data for robotics massage applications," 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014, pp. 5612-5617, doi: 10.1109/ICRA.2014.6907684.
[7]. Buys K, Cagniart C, Baksheev A, et al. An adaptable system for RGB-D based human body detection and pose estimation[J]. Journal of visual communication and image representation, 2014, 25(1): 39-52.
[8]. K. Sun, Q. Zhao, Z. Yang and X. Xu, "Visual Feedback System for Traditional Chinese Medical Massage Robot," 2019 Chinese Control Conference (CCC), Guangzhou, China, 2019, pp. 6379-6385, doi: 10.23919/ChiCC.2019.8866076.
[9]. Fei Honglin, Huang Lijie, Lu Donghai, et al. Acupoint Localization Method for Lumbar and Back Traditional Chinese Medicine Meridian Robot Based on Vision[J]. Modern Traditional Chinese Medicine, 2023, 43(05): 24-30. DOI: 10.13424/j.cnki.mtcm.2023.05.005.
[10]. Tang Chen(2022). Research and Application of Key Technologies of MRE Tactile Sensing. https://kns.cnki.net/kcms2/article/abstract?v=ttOPOQ75YvJIsrRSFyZVJ1eRjN9nn3-niNMDtAINvvsmMU4xakbK1v--7l_o8RJmlP3kwOxEPp4SV-NrNUEHZxlYrrbK1UG9tK-qB9fJ-jEogHnwYexXFe2d2_gu7eAt_LC42lU6WwN6CIB9RRvMVA==&uniplatform=NZKPT&language=CHS
[11]. Kuang Rongxin(2023). Identification and Localization of Human Back Acupoints Based on Deep Learning. https://kns.cnki.net/kcms2/article/abstract?v=ttOPOQ75YvIWM2guSm-MTdayf-I0VK1diavjbbafeLOqDMnW9tsZHZaAqSgg1z2g2CNrLCaVtQ7wMMF28vFdlQfjWZwSKtJR_HlzIRMzPqwrFyCLbfxs8iSdtsY7VCsS7h5db0QlMJLmt83ostlJiA==&uniplatform=NZKPT&language=CHS
[12]. Zhai Jingmei, Lu Dongwei. Optimization Teaching Strategy and BPNN-DMPs Trajectory Learning Model for Massage Robot[J]. Journal of South China University of Technology (Natural Science Edition), 2023, 51(12): 1-8.
Cite this article
Zhong,Y. (2024). Research on the technical principles and applications of massage robots. Applied and Computational Engineering,77,37-42.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Software Engineering and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. W. Wang, L. He, Q. Jiang, P. Zhang and Y. Shi, "Path planning algorithm of a novel massage robot," 2016 9th International Congress on Image and Signal Processing, BioMedical Engineering and Informatics (CISP-BMEI), Datong, China, 2016, pp. 1670-1674, doi: 10.1109/CISP-BMEI.2016.7852984.
[2]. Qiao Peng, Lu Yu, Bai Qingyuan, et al. Design of Target Point Automatic Localization System for Robotic Massage[J]. Journal of Jiamusi University (Natural Science Edition), 2023, 41(04): 22-27.
[3]. Gao Hongwei, Wei Hongbo, Lu Kaijiang. Kinematics Study of Tuina Massage Rehabilitation Robot Based on Six-Joint Mechanical Arm[J]. Journal of Baoji University of Arts and Sciences (Natural Science Edition), 2023, 43(04): 35-39+46. DOI: 10.13467/j.cnki.jbuns.2023.04.007.
[4]. Shaik A A, Tlale N S, Bright G. A new hybrid machine design for a 6 DOF industrial robot arm[J]. International Journal of Intelligent Systems Technologies and Applications, 2012, 11(1-2): 63-80.
[5]. Wang Z L, Liang Q, Zhang B C. Structural design of the robot arm for massage based on the chain drive[J]. Advanced Materials Research, 2013, 605: 1547-1551.
[6]. R. C. Luo, S. Y. Chen and K. C. Yeh, "Human body trajectory generation using point cloud data for robotics massage applications," 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014, pp. 5612-5617, doi: 10.1109/ICRA.2014.6907684.
[7]. Buys K, Cagniart C, Baksheev A, et al. An adaptable system for RGB-D based human body detection and pose estimation[J]. Journal of visual communication and image representation, 2014, 25(1): 39-52.
[8]. K. Sun, Q. Zhao, Z. Yang and X. Xu, "Visual Feedback System for Traditional Chinese Medical Massage Robot," 2019 Chinese Control Conference (CCC), Guangzhou, China, 2019, pp. 6379-6385, doi: 10.23919/ChiCC.2019.8866076.
[9]. Fei Honglin, Huang Lijie, Lu Donghai, et al. Acupoint Localization Method for Lumbar and Back Traditional Chinese Medicine Meridian Robot Based on Vision[J]. Modern Traditional Chinese Medicine, 2023, 43(05): 24-30. DOI: 10.13424/j.cnki.mtcm.2023.05.005.
[10]. Tang Chen(2022). Research and Application of Key Technologies of MRE Tactile Sensing. https://kns.cnki.net/kcms2/article/abstract?v=ttOPOQ75YvJIsrRSFyZVJ1eRjN9nn3-niNMDtAINvvsmMU4xakbK1v--7l_o8RJmlP3kwOxEPp4SV-NrNUEHZxlYrrbK1UG9tK-qB9fJ-jEogHnwYexXFe2d2_gu7eAt_LC42lU6WwN6CIB9RRvMVA==&uniplatform=NZKPT&language=CHS
[11]. Kuang Rongxin(2023). Identification and Localization of Human Back Acupoints Based on Deep Learning. https://kns.cnki.net/kcms2/article/abstract?v=ttOPOQ75YvIWM2guSm-MTdayf-I0VK1diavjbbafeLOqDMnW9tsZHZaAqSgg1z2g2CNrLCaVtQ7wMMF28vFdlQfjWZwSKtJR_HlzIRMzPqwrFyCLbfxs8iSdtsY7VCsS7h5db0QlMJLmt83ostlJiA==&uniplatform=NZKPT&language=CHS
[12]. Zhai Jingmei, Lu Dongwei. Optimization Teaching Strategy and BPNN-DMPs Trajectory Learning Model for Massage Robot[J]. Journal of South China University of Technology (Natural Science Edition), 2023, 51(12): 1-8.