







1. Introduction
The transition from the Information Age to the Post-Information Age, also known as the Digital Age, marks a pivotal shift in technological innovation. As first proposed by Professor Nicholas Negroponte in Digital Survival, this era emphasizes intelligence over mere information processing [1]. A key technological frontier in this transition is the integration of artificial intelligence (AI) neural networks and self-learning systems into bionic robots.
Bionic robots, designed to emulate biological functions in motor control, cognition, and neural processing, are advancing technological innovation through bio-inspired designs [2]. Evolution has endowed biological organisms with efficient structures and processes, and these are now guiding innovations in robotics [3,4].
End-to-end neural networks, a specialized form of deep learning, allow for the complete automation of problem-solving, from input to output, without manual intervention in feature extraction or pre-processing [5,6]. Complementarily, self-learning systems enable autonomous learning and improvement, a fundamental capability in advancing AI-driven robotics [7].
This review examines the integration of end-to-end neural networks and self-learning systems in bionic robots. It discusses their core concepts, advantages, applications, and future trends, with an emphasis on their potential to revolutionize the robotics field.
2. Literature Trends
Figure 1 illustrates the increasing number of scholarly publications related to “Bionic Robots” from 2010 to 2023, with a significant growth in interest over the past decade. The number of publications has risen from 841 in 2010 to 8,680 in 2023, reflecting the expanding research landscape in this field.
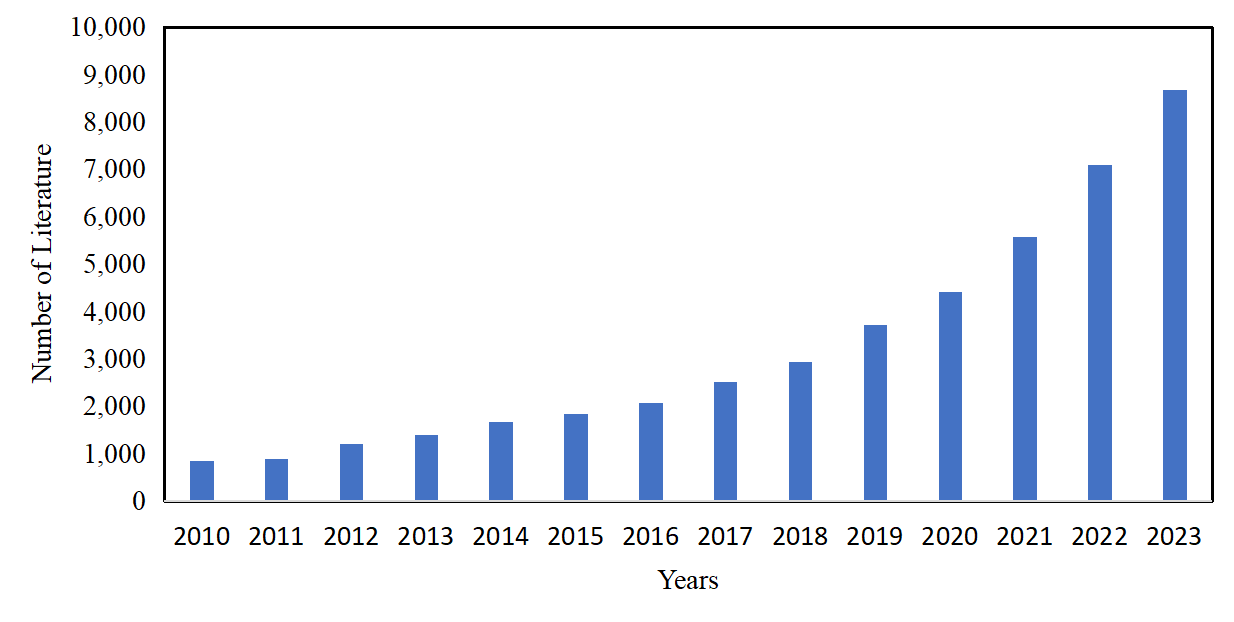
Figure 1. The number of papers searched using "Bionic Robots" per year
3. Foundations of End-to-End AI Neural Networks
3.1. Overview of End-to-End Learning
End-to-end deep learning is a paradigm that automates the entire problem-solving process using deep neural networks, from raw input to final output, without the need for manual preprocessing [8]. This approach has become integral in fields such as image and speech recognition [9,10]. Notable examples include Fei Wang et al.'s work on reconstructing 2D images from 1D signals using an end-to-end model [11] and Lijie Fan et al.'s TVNet, which improved video analysis through an optical-flow-inspired model [12].
The success of end-to-end learning in automating complex tasks highlights its potential across AI applications. As deep learning techniques advance, end-to-end learning is expected to enhance interdisciplinary AI applications, optimizing models and reducing the need for manual intervention.
3.2. Advantages in Robotics
Artificial neural networks (ANNs) are inspired by biological neural systems and have been successfully applied in system identification, control, pattern recognition, and vision in robotics [13,14]. Path planning, a key area in robotics, benefits significantly from AI neural networks. For instance, J. Wen et al. utilized particle swarm optimization for dynamic obstacle avoidance and fuzzy logic-based algorithms for visual robot path planning [15]. Similarly, Adriano B. Pinto et al. demonstrated that neural network control outperforms fuzzy logic in robotic path following tasks [16].
As computing power and algorithms continue to evolve, neural networks are expected to penetrate deeper into areas such as perception, decision-making, and adaptive learning, enabling robots to achieve higher levels of intelligence and autonomy [17].
4. Bionic Robots: Overview and Challenges
4.1. Key Features of Bionic Robots
Bionic robots are designed to mimic the structural, functional, and behavioral traits of living organisms. This biomimicry allows robots to operate with a level of adaptability and efficiency previously unattainable with traditional designs. Bionic robots integrate advanced AI systems, sensor technologies, and mechanical components to replicate the natural abilities of animals, such as locomotion, sensory perception, and autonomous learning [15].
An early example of biomimetic design is the world’s first bionic amphibious robot, Ursula, developed in 1996 for mine detection. The robot's crab-like structure enabled it to operate effectively in surf zones, demonstrating the advantages of mimicking biological systems in robotics [16]. Other notable designs include sea urchin-inspired robots with flexible tube feet for navigating ferrous surfaces, and Boston Dynamics' quadrupedal robot, Spot, known for its stability and agility in dynamic environments [17,18].
These examples illustrate how biomimicry can lead to more versatile and intelligent robots. By imitating the structure and function of natural organisms, researchers can develop robots capable of performing tasks in environments that are difficult or dangerous for humans. The integration of AI technologies, such as neural networks and self-learning systems, further enhances the adaptability and intelligence of these robots, allowing them to autonomously adjust to new challenges.
4.2. Current Challenges
Despite the progress made in the development of bionic robots, several challenges remain. One major obstacle is energy efficiency. Most modern robots rely on electromechanical systems that require multiple energy conversions, resulting in significant energy loss and reduced efficiency [19]. This limits the operational range and autonomy of robots, particularly in resource-constrained environments such as underwater or remote areas[20].
Material innovation is another key area of concern. Traditional robots are often made of rigid materials such as metals and plastics, which lack the flexibility and safety required for human-robot interactions. The development of soft, pliable materials that can mimic the elasticity and adaptability of biological tissues is crucial for creating safer and more efficient robots [21,22].
Additionally, bionic robots face challenges in achieving sensory capabilities comparable to those of living organisms. While AI systems have made significant strides in vision processing and object recognition, robotic sensors still lag behind biological systems in terms of dexterity, adaptability, and real-time decision-making. Overcoming these limitations will require advances in sensor technology, neural network integration, and machine learning algorithms[23].
5. Integrating Self-Learning Systems in Bionic Robots
5.1. Role of Self-Learning in Bionic Robotics
Self-learning systems, a subfield of AI that enables robots to acquire and refine skills independently, are transforming the landscape of bionic robotics. These systems allow robots to learn from their environment through observation and experimentation, without requiring explicit programming or human intervention [24]. Self-learning is particularly valuable in environments where robots must adapt to unpredictable conditions or learn new tasks on the fly.
One notable application of self-learning systems is in balance control. Jianxian Cai's work on operant conditioning-based learning systems demonstrated how self-learning enabled a two-wheeled robot to autonomously achieve balance control [25]. By simulating the way animals learn through trial and error, Cai's system allowed the robot to adapt its behavior based on feedback, ultimately achieving a high degree of stability without the need for manual adjustments.
Another promising application of self-learning systems is in dynamic path planning. In a study by Omid Gheibi, self-adaptive learning algorithms were used to enable a bionic robot to adjust its navigation strategies in real-time, optimizing its performance in unpredictable environments [26]. This approach is particularly useful in search-and-rescue operations, where robots must navigate complex terrains and adjust to changing conditions.
By integrating self-learning systems with end-to-end neural networks, robots can learn and optimize their behaviors in real time, making them more capable of responding to the challenges of dynamic and uncertain environments.
5.2. Benefits of Self-Learning Systems
The practical benefits of self-learning systems are manifold. In addition to improving adaptability and performance, self-learning systems reduce the time and resources required for robot training. Traditional machine learning models often require vast amounts of labeled data and human intervention to improve performance, but self-learning systems can overcome these limitations by autonomously generating data through exploration and interaction with their environment [27]. This significantly reduces the risk of overfitting and improves the generalization capabilities of the models.
Furthermore, self-learning systems can be used to enhance human-robot collaboration. Tesla's humanoid bionic robot, for instance, leverages self-learning capabilities to mimic human activities, allowing it to autonomously classify objects based on human interactions and adapt its behavior to changing conditions [28]. This ability to learn from humans in real-time opens up new possibilities for robots in areas such as healthcare, where they can assist with tasks ranging from elderly care to complex surgical procedures.
Looking forward, the integration of self-learning systems with end-to-end neural networks will enable robots to not only learn from their environments but also to predict and anticipate future challenges. This predictive learning capability will be critical in fields such as autonomous navigation, industrial automation, and defense.
6. Future Directions
6.1. Advancements in Self-Learning Techniques
Self-learning techniques are crucial for empowering robots with autonomy, adaptability, and stability. By integrating end-to-end deep learning, robots will achieve greater operational flexibility and intelligence in unpredictable environments [29]. The efficacy of self-learning techniques is evident in several dimensions:
1. Autonomy: At the heart of self-learning lies its autonomy, wherein algorithms operate independently of human intervention. They leverage data to autonomously learn and refine their performance, fostering a continuous improvement cycle.
2. Adaptability: These algorithms exhibit remarkable adaptability, enabling them to respond dynamically to environmental shifts. Without human oversight, they adjust their behavior to align with the evolving context, ensuring resilience and flexibility.
3. Stability: Furthermore, self-learning algorithms maintain a stable level of performance, ensuring reliable operation even in the absence of direct human intervention. This characteristic underscore their capability to withstand variations and maintain operational integrity.
6.2. Expanding Applications
Bionic robots are evolving in various forms, including multi-legged land robots, flapping-wing robots for flight, and underwater robots for aquatic exploration. Each system draws inspiration from nature, enhancing performance in diverse applications such as search-and-rescue missions and environmental monitoring [19,30].
Biomimetic multi-legged robot: The biomimetic multi-legged robot is an advanced robotic system that emulates the intricate structure and locomotion patterns of creatures with multiple legs. Examples include humanoid bipedal robots, quadrupedal robots reminiscent of tetrapods, and hexapod robots that mimic the agility of spiders. A cornerstone advantage of these multi-legged robots lies in their unparalleled adaptability to diverse terrains, allowing them to navigate through complex environments with remarkable ease. As such, they are ideally suited for demanding tasks such as search-and-rescue missions and environmental monitoring, where their versatility and resilience shine.
Biomimetic flapping-wing robot: The biomimetic flapping-wing robot mimics bird and insect flight, utilizing rapid wing beats for hovering, turns, and dives. Its two key advantages over non-bionic models are: exceptional performance even in small sizes, and superior maneuverability and agility compared to fixed-wing and rotary-wing robots [31].
Biomimetic underwater robot: The physiological adaptations of aquatic organisms, honed by millennia of natural selection, serve as optimal underwater designs. Biomimetic underwater robots, merging biomimicry with robotics, outstrip traditional models in travel efficiency and mobility, offering great promise for underwater rescue and deep-sea exploration [32].
7. Conclusion
This paper highlights the transformative potential of integrating end-to-end neural networks with self-learning systems in bionic robotics. By leveraging deep learning, bionic robots can autonomously refine their abilities, enhancing their adaptability and intelligence. While challenges remain, such as energy efficiency and material innovation, the convergence of AI neural networks and self-learning systems promises a future where robots are integral to fields such as exploration and human-robot collaboration. As technology advances, this synergy will drive further innovation, accelerating the development of intelligent, autonomous robots.
References
[1]. Cortada, J. W., & Cortada, J. W. (2020). Life in a Post-information Age Era?. Living with Computers: The Digital World of Today and Tomorrow, 59-76.
[2]. Harig, P. T. (1996). The digital general: Reflections on leadership in the post-information age. The US Army War College Quarterly: Parameters, 26(3), 8.
[3]. Gao, Z., Shi, Q., Fukuda, T., Li, C., & Huang, Q. (2019). An overview of biomimetic robots with animal behaviors. Neurocomputing, 332, 339-350.
[4]. Mojarrad, M., & Shahinpoor, M. (1997, April). Biomimetic robotic propulsion using polymeric artificial muscles. In Proceedings of International Conference on Robotics and Automation (Vol. 3, pp. 2152-2157). IEEE.
[5]. Kocić, J., Jovičić, N., & Drndarević, V. (2019). An end-to-end deep neural network for autonomous driving designed for embedded automotive platforms. Sensors, 19(9), 2064.
[6]. Kumar, K., & Thakur, G. S. M. (2012). Advanced applications of neural networks and artificial intelligence: A review. International journal of information technology and computer science, 4(6), 57-68.
[7]. Tsypkin, Y. (1968). Self-learning--What is it?. IEEE Transactions on Automatic Control, 13(6), 608-612.
[8]. Zhang, M., Cui, Z., Neumann, M., & Chen, Y. (2018, April). An end-to-end deep learning architecture for graph classification. In Proceedings of the AAAI conference on artificial intelligence (Vol. 32, No. 1).
[9]. Bengio, Y. (2009). Learning deep architectures for AI. Foundations and trends® in Machine Learning, 2(1), 1-127.
[10]. Glasmachers, T. (2017, November). Limits of end-to-end learning. In Asian conference on machine learning (pp. 17-32). PMLR.
[11]. Wang, F., Wang, H., Wang, H., Li, G., & Situ, G. (2019). Learning from simulation: An end-to-end deep-learning approach for computational ghost imaging. Optics express, 27(18), 25560-25572.
[12]. Fan, L., Huang, W., Gan, C., Ermon, S., Gong, B., & Huang, J. (2018). End-to-end learning of motion representation for video understanding. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 6016-6025).
[13]. Park, W. J., & Park, J. B. (2018). History and application of artificial neural networks in dentistry. European journal of dentistry, 12(04), 594-601.
[14]. Rao, D. H. (1995, January). Neural networks in robotics and control: some perspectives. In Proceedings of IEEE/IAS International Conference on Industrial Automation and Control (pp. 451-456). IEEE.
[15]. Wen, J., Chen, J., Jiang, J., Bi, Z., Wei, J. (2023). Application of Computer Vision Technology Based on Neural Network in Path Planning. In: Xu, Z., Alrabaee, S., Loyola-González, O., Cahyani, N.D.W., Ab Rahman, N.H. (eds) Cyber Security Intelligence and Analytics. CSIA 2023.
[16]. Pinto, A.B., Barbosa, R.S., Silva, M.F. (2015). Autonomous Robot Control by Neural Networks. In: Moreira, A., Matos, A., Veiga, G. (eds) CONTROLO’2014 – Proceedings of the 11th Portuguese Conference on Automatic Control. Lecture Notes in Electrical Engineering, vol 321. Springer, Cham.
[17]. van Gerven M and Bohte S (2017) Editorial: Artificial Neural Networks as Models of Neural Information Processing. Front. Comput. Neurosci. 11:114. doi: 10.3389/fncom.2017.00114
[18]. Wang, J., Chen, W., Xu, Y., Li, C., Jia, X., & Meng, M. Q. H. (2021). A survey of the development of biomimetic intelligence and robotics. Biomimetic Intelligence and Robotics, 1, 100001.
[19]. Ren, K., & Yu, J. (2021). Research status of bionic amphibious robots: A review. Ocean Engineering, 227, 108862.
[20]. Jiankun Wang, Weinan Chen, Xiao Xiao, Yangxin Xu, Chenming Li, Xiao Jia, Max Q.-H. Meng, "A survey of the development of biomimetic intelligence and robotics", Biomimetic Intelligence and Robotics, vol.1, pp.100001, 2021
[21]. Yim, M. (2007). Modular self-reconfigurable robot systems: Challenges and opportunities for the future. IEEE Robotics Automat. Mag., 10, 2-11.
[22]. Iida, F., & Laschi, C. (2011). Soft robotics: Challenges and perspectives. Procedia Computer Science, 7, 99-102.
[23]. Zhang, H., & Lee, S. (2022). Robot bionic vision technologies: A review. Applied Sciences, 12(16), 7970.
[24]. Zhang, C., Wang, W., Wang, Y., & Liu, L. (2018). Development and future challenges of bio-syncretic robots. Engineering, 4(4), 452-463.
[25]. Cai, J., & Ruan, X. (2011). Bionic autonomous learning control of a two-wheeled self-balancing flexible robot. Journal of Control Theory and Applications, 9(4), 521-528.
[26]. Gheibi, O., Weyns, D., & Quin, F. (2021). Applying machine learning in self-adaptive systems: A systematic literature review. ACM Transactions on Autonomous and Adaptive Systems (TAAS), 15(3), 1-37.
[27]. Nguyen, D. H., & Widrow, B. (1990). Neural networks for self-learning control systems. IEEE Control systems magazine, 10(3), 18-23.
[28]. Su, Y. (2023). Artificial Intelligence: The Significance of Tesla Bot. Highlights in Science, Engineering and Technology, 39, 1351-1355.
[29]. Yang, N., Yang, C., Ye, D., Jia, J., Chen, D., ... & Zhu, B. (2022). Deep learning‐based SCUC decision‐making: An intelligent data‐driven approach with self‐learning capabilities. IET Generation, Transmission & Distribution, 16(4), 629-640.
[30]. Phan, H. V., & Park, H. C. (2020). Mimicking nature’s flyers: a review of insect-inspired flying robots. Current Opinion in Insect Science, 42, 70-75.
[31]. Wood, R., Nagpal, R., & Wei, G. Y. (2013). Flight of the robobees. Scientific American, 308(3), 60-65.
[32]. Dong, H., Wu, Z., Chen, D., Tan, M., & Yu, J. (2020). Development of a whale-shark-inspired gliding robotic fish with high maneuverability. IEEE/ASME Transactions on Mechatronics, 25(6), 2824-2834.
Cite this article
Zhao,K. (2024). Review of Self-Learning Systems Based on End-to-End Deep Learning in Bionic Robots. Applied and Computational Engineering,97,127-132.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Cortada, J. W., & Cortada, J. W. (2020). Life in a Post-information Age Era?. Living with Computers: The Digital World of Today and Tomorrow, 59-76.
[2]. Harig, P. T. (1996). The digital general: Reflections on leadership in the post-information age. The US Army War College Quarterly: Parameters, 26(3), 8.
[3]. Gao, Z., Shi, Q., Fukuda, T., Li, C., & Huang, Q. (2019). An overview of biomimetic robots with animal behaviors. Neurocomputing, 332, 339-350.
[4]. Mojarrad, M., & Shahinpoor, M. (1997, April). Biomimetic robotic propulsion using polymeric artificial muscles. In Proceedings of International Conference on Robotics and Automation (Vol. 3, pp. 2152-2157). IEEE.
[5]. Kocić, J., Jovičić, N., & Drndarević, V. (2019). An end-to-end deep neural network for autonomous driving designed for embedded automotive platforms. Sensors, 19(9), 2064.
[6]. Kumar, K., & Thakur, G. S. M. (2012). Advanced applications of neural networks and artificial intelligence: A review. International journal of information technology and computer science, 4(6), 57-68.
[7]. Tsypkin, Y. (1968). Self-learning--What is it?. IEEE Transactions on Automatic Control, 13(6), 608-612.
[8]. Zhang, M., Cui, Z., Neumann, M., & Chen, Y. (2018, April). An end-to-end deep learning architecture for graph classification. In Proceedings of the AAAI conference on artificial intelligence (Vol. 32, No. 1).
[9]. Bengio, Y. (2009). Learning deep architectures for AI. Foundations and trends® in Machine Learning, 2(1), 1-127.
[10]. Glasmachers, T. (2017, November). Limits of end-to-end learning. In Asian conference on machine learning (pp. 17-32). PMLR.
[11]. Wang, F., Wang, H., Wang, H., Li, G., & Situ, G. (2019). Learning from simulation: An end-to-end deep-learning approach for computational ghost imaging. Optics express, 27(18), 25560-25572.
[12]. Fan, L., Huang, W., Gan, C., Ermon, S., Gong, B., & Huang, J. (2018). End-to-end learning of motion representation for video understanding. In Proceedings of the IEEE conference on computer vision and pattern recognition (pp. 6016-6025).
[13]. Park, W. J., & Park, J. B. (2018). History and application of artificial neural networks in dentistry. European journal of dentistry, 12(04), 594-601.
[14]. Rao, D. H. (1995, January). Neural networks in robotics and control: some perspectives. In Proceedings of IEEE/IAS International Conference on Industrial Automation and Control (pp. 451-456). IEEE.
[15]. Wen, J., Chen, J., Jiang, J., Bi, Z., Wei, J. (2023). Application of Computer Vision Technology Based on Neural Network in Path Planning. In: Xu, Z., Alrabaee, S., Loyola-González, O., Cahyani, N.D.W., Ab Rahman, N.H. (eds) Cyber Security Intelligence and Analytics. CSIA 2023.
[16]. Pinto, A.B., Barbosa, R.S., Silva, M.F. (2015). Autonomous Robot Control by Neural Networks. In: Moreira, A., Matos, A., Veiga, G. (eds) CONTROLO’2014 – Proceedings of the 11th Portuguese Conference on Automatic Control. Lecture Notes in Electrical Engineering, vol 321. Springer, Cham.
[17]. van Gerven M and Bohte S (2017) Editorial: Artificial Neural Networks as Models of Neural Information Processing. Front. Comput. Neurosci. 11:114. doi: 10.3389/fncom.2017.00114
[18]. Wang, J., Chen, W., Xu, Y., Li, C., Jia, X., & Meng, M. Q. H. (2021). A survey of the development of biomimetic intelligence and robotics. Biomimetic Intelligence and Robotics, 1, 100001.
[19]. Ren, K., & Yu, J. (2021). Research status of bionic amphibious robots: A review. Ocean Engineering, 227, 108862.
[20]. Jiankun Wang, Weinan Chen, Xiao Xiao, Yangxin Xu, Chenming Li, Xiao Jia, Max Q.-H. Meng, "A survey of the development of biomimetic intelligence and robotics", Biomimetic Intelligence and Robotics, vol.1, pp.100001, 2021
[21]. Yim, M. (2007). Modular self-reconfigurable robot systems: Challenges and opportunities for the future. IEEE Robotics Automat. Mag., 10, 2-11.
[22]. Iida, F., & Laschi, C. (2011). Soft robotics: Challenges and perspectives. Procedia Computer Science, 7, 99-102.
[23]. Zhang, H., & Lee, S. (2022). Robot bionic vision technologies: A review. Applied Sciences, 12(16), 7970.
[24]. Zhang, C., Wang, W., Wang, Y., & Liu, L. (2018). Development and future challenges of bio-syncretic robots. Engineering, 4(4), 452-463.
[25]. Cai, J., & Ruan, X. (2011). Bionic autonomous learning control of a two-wheeled self-balancing flexible robot. Journal of Control Theory and Applications, 9(4), 521-528.
[26]. Gheibi, O., Weyns, D., & Quin, F. (2021). Applying machine learning in self-adaptive systems: A systematic literature review. ACM Transactions on Autonomous and Adaptive Systems (TAAS), 15(3), 1-37.
[27]. Nguyen, D. H., & Widrow, B. (1990). Neural networks for self-learning control systems. IEEE Control systems magazine, 10(3), 18-23.
[28]. Su, Y. (2023). Artificial Intelligence: The Significance of Tesla Bot. Highlights in Science, Engineering and Technology, 39, 1351-1355.
[29]. Yang, N., Yang, C., Ye, D., Jia, J., Chen, D., ... & Zhu, B. (2022). Deep learning‐based SCUC decision‐making: An intelligent data‐driven approach with self‐learning capabilities. IET Generation, Transmission & Distribution, 16(4), 629-640.
[30]. Phan, H. V., & Park, H. C. (2020). Mimicking nature’s flyers: a review of insect-inspired flying robots. Current Opinion in Insect Science, 42, 70-75.
[31]. Wood, R., Nagpal, R., & Wei, G. Y. (2013). Flight of the robobees. Scientific American, 308(3), 60-65.
[32]. Dong, H., Wu, Z., Chen, D., Tan, M., & Yu, J. (2020). Development of a whale-shark-inspired gliding robotic fish with high maneuverability. IEEE/ASME Transactions on Mechatronics, 25(6), 2824-2834.