






1. Introduction
Recovery of joint and muscle movement abilities after strokes or other diseases, as well as mechanical injuries, is hopeful with timely rehabilitation treatment. Traditional rehabilitation methods involve rehabilitation therapists providing manual therapy to patients; however, with the increasing number of patients with movement disorders, there is a notable shortage of rehabilitation therapists, coupled with high costs and strict requirements for facilities and equipment. The use of exoskeleton rehabilitation robots to provide assistive treatment for patients has become a common and effective rehabilitation method worldwide.
The research and development of ankle rehabilitation robots and other exoskeleton rehabilitation robots have been underway for approximately a century. Although large-scale popularization and application have not yet been achieved, some companies have begun to commercialize exoskeleton robots. Portable exoskeleton robots are gradually moving toward clinical application, yielding significant therapeutic data that lays a foundation for further development. Currently, various innovative rehabilitation robot designs are continuously evolving, focusing on improving the robots' compliance with new materials and enhancing control precision through efficient transmission structures.
This paper takes ankle rehabilitation robots as an example, reviewing the current research status through a comprehensive literature search from two aspects: summarizing innovative designs, identifying existing problems, and discussing clinical applications. Future research directions are also anticipated, as illustrated in Figure 1.
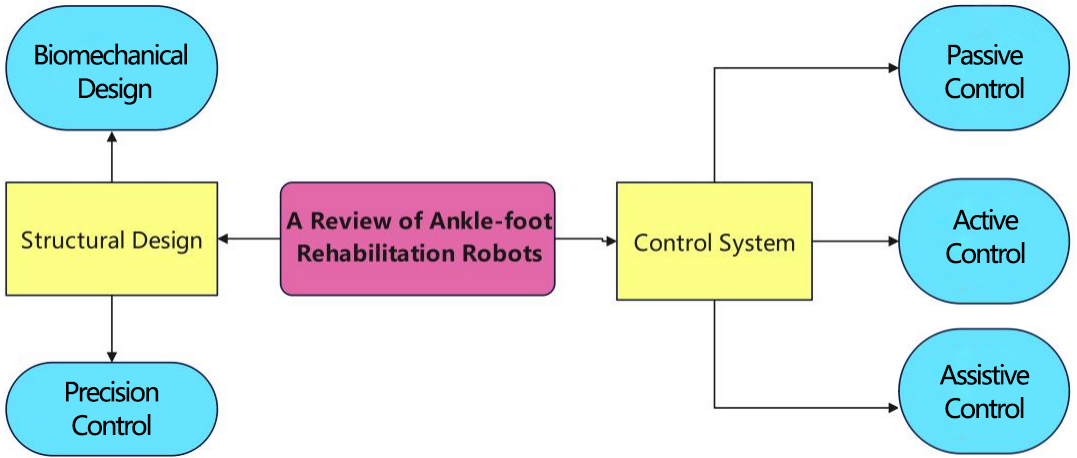
Figure 1: Overview framework of this paper.
2. Kinematic Structural Design of Ankle Rehabilitation Robots
2.1. Biocompatibility Design Issues in Ankle Rehabilitation Robot Mechanical Structures
The ankle joint is a complex structure primarily composed of the fibula, the distal end of the tibia, and the talus. To meet the demands of rehabilitation training, researchers have designed various rehabilitation robot structures to address a series of challenging issues in related fields.
In the design of ankle rehabilitation robots, it is essential to consider that the ankle joint is the key joint in lower limb movement that bears the most body weight. The medial malleolus and lateral malleolus are formed by the protruding parts of the distal medial tibia and the lateral fibula, respectively. The lateral malleolus is longer than the medial malleolus, making it susceptible to injury from excessive movement. Therefore, enhancing the compliance of rehabilitation robots is a crucial factor in improving their biocompatibility. In line with this requirement, researchers such as Cui Xiao[1] have designed a soft actuator that combines silicone air sacs with a fabric shell, demonstrating strong adaptability to the structural features of the ankle's medial and lateral malleoli. Additionally, Zhu Chengxiang from Wuhan University of Technology[2] designed a parallel flexible ankle rehabilitation robot that accommodates dorsiflexion/plantarflexion, inversion/eversion, and abduction/adduction movements. This robot features smooth operation, minimal jitter, and a high output force-to-weight ratio, effectively restoring injuries to the anterior talofibular ligament and calcaneofibular ligament caused by excessive dorsiflexion of the foot. Furthermore, considering that the anterior talofibular ligament and calcaneofibular ligament are prone to injury from excessive dorsiflexion, Left Jie et al.[6] elaborated on another cylindrical cavity structure made from an inner rubber tube and an outer woven net. By over-inflating, the internal pressure changes to generate an external pulling force, ensuring coverage of the extreme poses during ankle rehabilitation exercises.
2.2. Precision Control Issues in the Mechanical Structure of Ankle Rehabilitation Robots
For rehabilitation robots, achieving the goals of motion rehabilitation requires precise control of ankle joint movements. In related research, Yang Kaisheng et al.[3] opted to use flexible ropes instead of rigid linkages to drive a three-degree-of-freedom rehabilitation mechanism. This design offers advantages such as low inertia, a large workspace, good compliance, and high safety. Similarly, Wu Huafang[4] proposed a novel three-to-one hybrid parallel configuration for ankle rehabilitation, leading to the design of a second-generation decoupled parallel robot with high driving efficiency and a wide range of joint motion, addressing several current issues faced by ankle rehabilitation robots. Lei Xiuyu[5], on the other hand, adopted a different approach: using traditional motor-driven methods with electromagnetic clutches and a screw-slider-rocker linkage structure to achieve synchronized rehabilitation movements for the ankle joint. This method is cost-effective, operates quietly, and is easy to control. Overall, to achieve efficient and precise control systems, researchers have employed various methods and achieved significant results. However, there remains room for improvement in the degrees of freedom and driving efficiency of the driving devices, and combining multiple driving methods is expected to be one of the future research directions.
2.3. Handling Abnormal Situations
In the design and application of rehabilitation robots, mechanical structures inevitably encounter issues such as wear, low control precision, or external factors, leading to abnormal situations. These can cause sudden changes in limb movement direction, increasing the risk of ligament injuries in the ankle. To address this problem, Zuo Jie[6] proposed a reconstruction method for coupling interference in pneumatic muscle parallel drive mechanisms, designing a state feedback-based compensation control algorithm. This approach also included reserving a certain amount of pre-tension during the installation of pneumatic muscles to achieve high-performance motion control for flexible parallel drive rehabilitation robots. Additionally, Zhu Chengxiang introduced an adaptive inverse sliding mode control method based on a nonlinear disturbance observer to handle unpredictable disturbances during robot-assisted training, effectively improving position control accuracy [2]. However, overall, the scientific community has not sufficiently emphasized the handling of such abnormal situations. Enhancing the safety of facilities and improving their capability to manage abnormal situations remains a significant research direction for ankle rehabilitation robots in the future.
2.4. Clinical Applications of Ankle Rehabilitation Robots
Cheng Hong et al.[7] conducted a review of the research progress on rehabilitation robots and their clinical applications, summarizing relevant studies and confirming that rehabilitation robots have significant effects in assisting the rehabilitation treatment of patients with hemiplegia. He categorized ankle rehabilitation robots into two main types: platform-based and wearable. The former has shown remarkable efficacy in compensating for the remaining muscle strength of patients, improving joint mobility, and enhancing muscle power. The latter greatly aids patients in walking training, posture correction, and strength training, making it suitable for later stages of rehabilitation. However, several issues still exist in the clinical application of ankle rehabilitation robots. For example, the matching ability of cognitive rehabilitation functions of rehabilitation robots with patients' rehabilitation training tasks is relatively low; enhancing the coordination of patients' motor cognition presents significant challenges; and the integrated assessment of rehabilitation training outcomes is difficult, failing to accurately reflect the patient's recovery status. Overall, while ankle rehabilitation robots have achieved effective results in clinical settings, traditional rehabilitation technologies have reached a bottleneck, with issues such as completing high-precision and high-repetition passive training still requiring urgent solutions. Therefore, there is a need for breakthroughs in new technological methods.
3. Control System Design for Ankle Rehabilitation Robots
Typically, rehabilitation robots operate in three training control modes: passive, active, and assistive. In passive training mode, the system uses the collected positional information of rehabilitation movements as input, allowing the device to drive the patient along a fixed trajectory for rehabilitation training. In active training mode, the patient can move independently, and the device tracks and collects related parameters such as position and speed, converting these parameters into signals that determine whether the training plan should proceed. In assistive training mode, the system detects certain information from the human body (such as EEG or EMG signals) and feeds this back to the controller for processing. The actuator then provides assistance to help the limb move along a specific trajectory, requiring relatively high technical demands[8].
3.1. Passive Control System
Passive rehabilitation movement of the ankle refers to the motion of the ankle driven along a predetermined trajectory, suitable for patients in the early to middle stages of rehabilitation who lack mobility[9]. To meet the need for multi-degree-of-freedom movement of the joints and provide various training methods, Liu Yingchao et al.[10] designed a system with six driving cylinders to achieve the desired trajectory. The movement of the cylinders drives the rehabilitation robot, enabling the ankle joint to complete rehabilitation actions and achieve early recovery. In terms of the degrees of freedom in ankle movement, Wu Huafang[4] designed a second-generation decoupled ankle rehabilitation robot that improves degrees of freedom using a parallel structure. The decoupling design reduces redundant degrees of freedom and employs pre-programmed rehabilitation plans, allowing rehabilitation physicians to provide remote signals to drive the robot's movements. To enhance the degrees of freedom, Wang Xinlei et al.[11] developed a six-degree-of-freedom ankle rehabilitation robot based on a 3-PRPS (redundant parallel mechanism) that also utilizes a passive control system. Considering the characteristics of passive systems, inverse kinematics analysis is used to ensure effective rehabilitation of the ankle.
3.2. Active and Assistive Control Systems
In practical rehabilitation processes, it is often necessary to adjust rehabilitation strategies according to the actual conditions of the patient. To achieve this goal, the control methods for rehabilitation robots are divided into two main categories: active control and assistive control. Active control uses relevant parameters from the individual as switch signals, allowing patients or rehabilitation therapists to adjust rehabilitation strategies. The main purpose is to enable the rehabilitation robot to move according to the patient's intentions. For example, Zhang Wenjiao[12] implemented a system that detects muscle electrical signals to form related parameters displayed on a computer screen, enabling the rehabilitation therapist to adjust the robot's movements.
In contrast, assistive control adjusts rehabilitation strategies in real-time based on movement condition parameters, providing on-demand assistance. Zainul N A and Syuhadah N L [13] designed a control system composed of a PID (Proportional, Integral, Derivative) feedback control loop and an adjustable gain K to address the issue of insufficient active awareness in patients during rehabilitation and to coordinate assistance with the patient's autonomous movements. The gain is adjusted based on the patient's level of capability (LOC), measured by force-sensitive resistors (FSR). In the feedback loop, the operator can set the desired angular position at the control input. An encoder measures the actual displacement and compares it with the desired position. The difference (error) between the desired and actual positions is used to calculate the control output signal, which is then sent to drive the rehabilitation robot's motor. Following this approach, Tu Yao[14] employed a human-computer interaction force design method, introducing human-computer interaction force variables in the control system to achieve real-time monitoring of movement trajectories with high anti-interference capability.
In summary, the current challenges in active and assistive control systems lie in the design of human-computer interaction systems. Based on different human-computer interaction strategies, active and assistive control can often achieve different rehabilitation outcomes. How to scientifically design the human-computer interaction structure, along with the application of cutting-edge AI technologies like machine learning, will be key areas of focus for future advancements in control methods.
3.3. Common Rehabilitation Control System Designs
In the design of actual robotic control systems, designers often combine various control systems such as passive, active, and assistive methods. In theoretical research, Li Yinzeng[9] elaborates on multiple passive rehabilitation training methods and explains how different control strategies for rehabilitation robots can be applied during various rehabilitation stages, providing important reference value. In practical applications, Shen Zhihang et al.[15] aim to enhance the system's autonomy and adaptive movement capabilities. Their research utilizes trajectory control strategies, allowing patients to move along pre-programmed paths while simultaneously collecting their electromyographic signals to facilitate autonomous rehabilitation training.
4. Conclusion
This paper first addresses the necessity for the development of rehabilitation robots in light of the current aging situation around the world. It then reviews relevant research on ankle rehabilitation robots from two aspects: the mechanical structure design and control system design. The first section discusses aspects such as biological adaptability, precise control issues, handling of abnormal situations, and clinical applications, summarizing the latest research findings while analyzing their advantages and disadvantages. The second section focuses on the three typical control methods, including passive, active, and assistive, providing detailed insights into the design considerations for rehabilitation training with ankle rehabilitation robots, which hold significant reference value. Looking ahead, the integration of highly adaptable rehabilitation robots with cutting-edge technologies like artificial intelligence holds promise for broader applications in injury recovery, exercise training, and engineering, ultimately providing convenience for treatment and daily life.
References
[1]. Cui, X., Wang, Y., Wang, W., et al. (2023). Design and control of a flexible ankle rehabilitation robot. Mechanical Design and Research, 39(06), 1-5+16.DOI:10.13952/j.cnki.jofmdr.2023.0247.
[2]. Zhu, C. (2019). Design and motion control research of a parallel redundant flexible ankle rehabilitation robot (Master's thesis). Wuhan University of Technology.DOI:10.27381/d.cnki.gwlgu.2019.000179.
[3]. Yang, K., Hu, J., Han, C., et al. (2024). Kinematics and stiffness study of a rope-driven ankle rehabilitation robot. Robotics, 46(04), 503-512.DOI:10.13973/j.cnki.robot.240050.
[4]. Wu, H. (2021). Design and optimization of a decoupled parallel ankle rehabilitation robot (Master's thesis). Yanshan University.DOI:10.27440/d.cnki.gysdu.2021.000359.
[5]. Lei, X. (2021). Development and rehabilitation effect evaluation of an ankle-foot rehabilitation trainer (Master's thesis). Dalian University of Technology.DOI:10.26991/d.cnki.gdllu.2021.000892.
[6]. Zuo, J. (2022). Control research of a pneumatic muscle-driven ankle rehabilitation robot (Master's thesis). Wuhan University of Technology.DOI:10.27381/d.cnki.gwlgu.2022.000075.
[7]. Cheng, H., Huang, R., Qiu, J., et al. (2021). Review of rehabilitation robots and their clinical applications. Robotics, 43(05), 606-619.DOI:10.13973/j.cnki.robot.200570.
[8]. Wang, Y., Xie, L., & Hong, W. (2018). Force feedback control for assistive training of a wrist rehabilitation robot. Journal of Shanghai Jiao Tong University, 52(01), 70-75.DOI:10.16183/j.cnki.jsjtu.2018.01.011.
[9]. Li, Y. (2021). Quantitative evaluation of active and passive rehabilitation effects of an ankle rehabilitation robot (Master's thesis). Fuzhou University.DOI:10.27022/d.cnki.gfzhu.2021.000604.
[10]. Liu, Y. (2014). Research on a pneumatic parallel ankle rehabilitation robot (Master's thesis). Harbin Institute of Technology.
[11]. Wang, X., Jiang, J., Qin, J., et al. (2024). Simulation analysis of the inverse kinematics of a 3-PRPS ankle rehabilitation robot. Journal of Qingdao University (Engineering Technology Edition), 39(01), 95-100.DOI:10.13306/j.1006-9798.2024.01.014.
[12]. Zhang, W. (2022). Research on an ankle-foot rehabilitation robot system based on muscle electrical signals (Master's thesis). Shenyang University of Technology.DOI:10.27323/d.cnki.gsgyc.2022.000053.
[13]. Zainul, N. A., & Syuhadah, N. L. (2021). Assist as needed control strategy for upper limb rehabilitation robot in eating activity. IIUM Engineering Journal, 22(1), 298-323.
[14]. Tu, Y., Zhu, A., Song, J., et al. (2019). Human-robot interaction force adaptive impedance control for lower limb exoskeleton rehabilitation robots. Journal of Xi'an Jiaotong University, 53(06), 9-16.
[15]. Shen, Z., Zhang, L., Su, Y., et al. (2024). Autonomous adaptive control strategy based on an ankle rehabilitation robot. Chinese Journal of Medical Devices, 48(04), 385-391.
[16]. Yu, G., Yang, Y., Zhang, K., et al. (2005). Experimental study on the impact of the subtalar joint and ankle joint on hindfoot movement. Chinese Journal of Orthopaedics, (04), 236-239.
Cite this article
Ma,H. (2025). Mechanical Design and System Construction of Ankle Rehabilitation Robots. Applied and Computational Engineering,117,66-71.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Cui, X., Wang, Y., Wang, W., et al. (2023). Design and control of a flexible ankle rehabilitation robot. Mechanical Design and Research, 39(06), 1-5+16.DOI:10.13952/j.cnki.jofmdr.2023.0247.
[2]. Zhu, C. (2019). Design and motion control research of a parallel redundant flexible ankle rehabilitation robot (Master's thesis). Wuhan University of Technology.DOI:10.27381/d.cnki.gwlgu.2019.000179.
[3]. Yang, K., Hu, J., Han, C., et al. (2024). Kinematics and stiffness study of a rope-driven ankle rehabilitation robot. Robotics, 46(04), 503-512.DOI:10.13973/j.cnki.robot.240050.
[4]. Wu, H. (2021). Design and optimization of a decoupled parallel ankle rehabilitation robot (Master's thesis). Yanshan University.DOI:10.27440/d.cnki.gysdu.2021.000359.
[5]. Lei, X. (2021). Development and rehabilitation effect evaluation of an ankle-foot rehabilitation trainer (Master's thesis). Dalian University of Technology.DOI:10.26991/d.cnki.gdllu.2021.000892.
[6]. Zuo, J. (2022). Control research of a pneumatic muscle-driven ankle rehabilitation robot (Master's thesis). Wuhan University of Technology.DOI:10.27381/d.cnki.gwlgu.2022.000075.
[7]. Cheng, H., Huang, R., Qiu, J., et al. (2021). Review of rehabilitation robots and their clinical applications. Robotics, 43(05), 606-619.DOI:10.13973/j.cnki.robot.200570.
[8]. Wang, Y., Xie, L., & Hong, W. (2018). Force feedback control for assistive training of a wrist rehabilitation robot. Journal of Shanghai Jiao Tong University, 52(01), 70-75.DOI:10.16183/j.cnki.jsjtu.2018.01.011.
[9]. Li, Y. (2021). Quantitative evaluation of active and passive rehabilitation effects of an ankle rehabilitation robot (Master's thesis). Fuzhou University.DOI:10.27022/d.cnki.gfzhu.2021.000604.
[10]. Liu, Y. (2014). Research on a pneumatic parallel ankle rehabilitation robot (Master's thesis). Harbin Institute of Technology.
[11]. Wang, X., Jiang, J., Qin, J., et al. (2024). Simulation analysis of the inverse kinematics of a 3-PRPS ankle rehabilitation robot. Journal of Qingdao University (Engineering Technology Edition), 39(01), 95-100.DOI:10.13306/j.1006-9798.2024.01.014.
[12]. Zhang, W. (2022). Research on an ankle-foot rehabilitation robot system based on muscle electrical signals (Master's thesis). Shenyang University of Technology.DOI:10.27323/d.cnki.gsgyc.2022.000053.
[13]. Zainul, N. A., & Syuhadah, N. L. (2021). Assist as needed control strategy for upper limb rehabilitation robot in eating activity. IIUM Engineering Journal, 22(1), 298-323.
[14]. Tu, Y., Zhu, A., Song, J., et al. (2019). Human-robot interaction force adaptive impedance control for lower limb exoskeleton rehabilitation robots. Journal of Xi'an Jiaotong University, 53(06), 9-16.
[15]. Shen, Z., Zhang, L., Su, Y., et al. (2024). Autonomous adaptive control strategy based on an ankle rehabilitation robot. Chinese Journal of Medical Devices, 48(04), 385-391.
[16]. Yu, G., Yang, Y., Zhang, K., et al. (2005). Experimental study on the impact of the subtalar joint and ankle joint on hindfoot movement. Chinese Journal of Orthopaedics, (04), 236-239.