






1. Introduction
Living creatures and the entire planet depend on water for their survival, yet humans know far less about a planet that is 70 per cent ocean. Ocean exploration requires communications technology to intercept information travelling from the oceans to the land. Underwater wired communication is one such method, and although it offers high transmission rates, this method is only suitable for large fixed systems and requires proper maintenance and engineering issues [1]. Therefore, mobile underwater devices such as Autonomous Underwater Vehicles (AUVs) require the use of wireless communication technology. Different modes of communication have their own advantages and disadvantages. Underwater acoustic communication, which was the first to emerge and is now one of the most mature technologies, is valued for its long-range capabilities. Underwater optical communication, which is known for its high-speed data transmission, and underwater radio wave communication, which has a smooth air-water interface transmission [2]. Each of these modes has different advantages and limitations for different scenarios.
This paper analyses the current status, challenges and explores their future prospects with respect to these underwater communication technologies, in addition to discussing related application techniques and investigating whether these communication methods can be used as a basis for emerging technologies such as multimodal communication systems and artificial intelligence optimisation. It provides academics with comprehensive technical summaries, comparative analyses, and sorts out research hotspots and technical bottlenecks, reveals possible future research directions, and promotes further development in the field.
2. Modes of Communication- Underwater Wireless Optical Communication
2.1. Current State
Underwater optical communication is relatively new compared to the other two modes of communication and makes use of ultraviolet (UV), visible or infrared light [2], especially light within the blue-green spectrum (470-570 nm) as its wavelengths have the lowest energy attenuation in the ocean, reaching up to 200 metres in clear oceans [3]. Under the conditions of clear oceans, data rates can exceed 1 Gbps, which makes optical communications particularly suitable for applications that require real-time data transmission, such as video streaming and synchronised operation of automatic underwater vehicles (AUVs).
Recent advances in light emitting diode (LED) and laser diode (LD) technologies have greatly improved the performance and efficiency of optical systems [2]. While LEDs are widely adopted for their flexibility and energy efficiency [3], laser diodes provide a highly focused beam to support transmission over longer distances. Adaptive beam steering mechanisms are essential for maintaining stable communication and improving the alignment between the transmitter and receiver, as Underwater Optical Communication Systems (UW-OCSs) necessitate accurate Line of Sight (LOS).
Despite its potential, optical communication is very sensitive to environmental factors such as water turbidity and suspended particles. While effective transmission distances can reach tens of metres in clear water, scattering and absorption phenomena in turbid water can cause transmission distances to be significantly reduced [5]. These limitations highlight the importance of further innovations in system design and channel tuning to optimise performance under different underwater conditions.
2.2. Challenges and Future Outlooks
Optical communication faces great challenges in underwater environments, mainly due to the inherent physical properties of water that affect light propagation, i.e., its inherent optical properties (IOPs) and apparent optical properties (AOPs). The IOPs depend only on the transmission channel, but the AOPs depend on both the optical field's transmission channel and the geometry of the optical field [6]. However, the IOP will be more relevant in underwater wireless optical communications [7].
The two main IOPs are the spectral absorption coefficient and the spectral volume scattering function [8], and one of the main problems of lightwave communication is scattering and absorption. Absorption occurs in chlorophyll in phytoplankton, coloured dissolved organic matter (CDOM), water molecules and dissolved salts in water [9]. For this reason, wavelengths that are not in the blue-green range are easily absorbed. Underwater optical communication can only be used over short distances, usually less than 10 meters in saltwater, because absorption rises exponentially with distance, even in this ideal wavelength range (470–570 nm).
Scattering, on the other hand, occurs when light deviates from its original path when it interacts with suspended particles and other tiny impurities in the water. This effect is particularly noticeable in turbid or littoral waters, where high concentrations of particles and organic and inorganic particles can greatly reduce the clarity and range of the signal [7][10].
As mentioned earlier, precise alignment between the optical transmitter and receiver is important to ensure stable communications, but it can be affected and disrupted by water currents, equipment movement or marine life. This alignment becomes more difficult, especially when dealing with moving platforms such as AUVs and ROVs.
In addition, environmental factors such as salinity, temperature and turbulence can increase the variability of the underwater optical channel, leading to attenuation and phase distortion. For example, temperature variations can affect the refractive index of water, altering the path of light propagation and increasing the complexity of system design [10].
Future research priorities can address these challenges through advances in technology and algorithms. Instead, multi-wavelength systems capable of dynamically switching between optimal wavelengths under specific water quality conditions are now being developed to mitigate scattering and absorption effects, such as the spectroscopic measurements performed by A. Morel and the optical classification developed by L. Prieur and S. Sathyendranath [11, 12]. Similarly, the integration of Artificial Intelligence (AI) and machine learning algorithms into optical systems can enhance real-time beam alignment, error correction, and adaptive power allocation to ensure more reliable communications.
The integration of optical communication with acoustic or electromagnetic systems can yield hybrid networks that enhance operational range while ensuring high-speed data transmission. These networks can effectively balance the trade-offs among range, speed, and reliability, rendering them ideal for intricate underwater operations.
3. Modes of Communication- Underwater Wireless Acoustic Communication
3.1. Current State
Acoustic communication is the most mature and widely used underwater wireless communication technology. Compared to air, sound waves have a higher bulk modulus (lower compressibility) in water. The propagation speed is given by:
\( v=\sqrt[]{K/ρ } \) (1)
Therefore propagation in water is more efficient and acoustic waves are transmitted faster and over longer distances.
This is in addition to the fact that it uses low frequency (usually in the kilohertz range) operating frequencies to minimise signal attenuation and enable reliable communication over large areas. Due to the limited bandwidth of acoustic channels, data transmission rates are usually limited to kilobits per second [2]. In contrast, recent advances in modulation techniques such as Orthogonal Frequency Division Multiplexing (OFDM) and Direct Sequence Spread Spectrum (DSSS) have improved the spectral efficiency and reduced the BER [13]. Moreover, techniques such as error-correcting codes and adaptive equalization enhance signal resilience in adverse underwater environments marked by noise and multipath propagation [13], thus expanding the utility of acoustic communication in domains like Underwater Sensor Networks (UWSNs), Autonomous Underwater Vehicle (AUV) communications, and seismic monitoring. Despite various environmental challenges, the adoption of acoustic technologies in essential underwater applications remains prevalent.
3.2. Challenges and Future Outlooks
Long latency times and low data rates are two of the inherent drawbacks of acoustic communication, despite its high reliability over long distances. This is because acoustic communication uses low frequencies (in the kilohertz range) to minimise signal attenuation, which typically restricts the achievable data rate to kilobits per second [2], essentially also reducing the available bandwidth for bandwidth acoustic communication. In addition, sound travels at about 1500 m/s in water, which is associated with higher latency and increased complexity for real-time applications compared to electromagnetic waves [14, 15]. Examples include operations involving multiple AUVs or sensor nodes.
However, environmental factors including temperature, salinity variations and water depth still pose significant challenges to the stability of acoustic signals [7]. In addition to this, noise from marine organisms, human activities (shipping) and natural phenomena (waves and underwater currents) can lead to signal attenuation, and multipath effects (reflections of signals off surfaces such as the seabed or water surface) can also lead to interference and reduced signal clarity [13].
Future developments in acoustic communications aim to overcome these limitations through technological innovations:
(1) Signal Processing: Techniques such as adaptive equalisation [7], time-reversal mirrors (TRMs) [16,17] and Doppler-compensated algorithms [18] are developing in order to reduce multipath and Doppler effects.
(2) Artificial intelligence-driven noise suppression [19]: Machine learning algorithms are applied to dynamically filter environmental noise and improve signal clarity in real time.
(3) Energy-efficient acoustic modems: In addition to the many signal processing tools to be included in order to achieve high data rates using any available technology or where environmental conditions allow [7], low-power modem designs are needed for the deployment of large-scale underwater sensor networks in remote or deep-sea environments with limited power supply.
Future prospects for acoustic communications can be integrated into hybrid systems. Acoustic links can be used as the backbone of long-distance communications, supplemented by high-speed optical or electromagnetic (EM) links for local data transmission, to take full advantage of the strengths of each technology and overcome the limitations of individual modes.
4. Modes of Communication- Underwater Wireless RF Communication
4.1. Current State
Electromagnetic (EM) communications, while less prevalent than optical or acoustic methods, are crucial for application-specific underwater communication. Current EM systems utilize radio frequency (RF) waves within the EM spectrum[20], predominantly operating in the extremely low frequency (ELF, 3-30 Hz) and very low frequency (VLF, 3-30 kHz) bands, which experience lower attenuation underwater, facilitating longer-distance communication despite limited data rates. High-frequency electromagnetic waves (e.g., GHz range) suffer significant attenuation in seawater due to high conductivity, restricting their effective range to mere meters. As illustrated in Figure 1, attenuation intensifies with increasing RF frequency. However, these waves perform effectively in freshwater environments with minimal attenuation or at the air-water interface, making them suitable for shallow water or buoy applications[7].
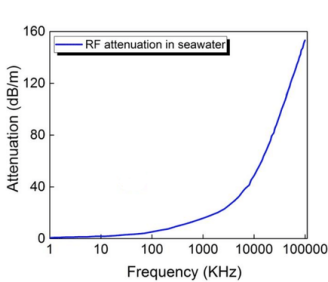
Figure 1: RF attenuation in sea water[21]
Recent advances in antenna design have improved the viability of underwater electromagnetic wave communications, such as compact and efficient loop antennas and low-power transceivers [22]. Advancements in communication for autonomous underwater vehicles (AUVs), environmental sensors, and pipeline monitoring have been achieved. Electromagnetic (EM) communications are particularly beneficial for seamless interface transitions, such as data relay between underwater equipment and surface buoys to satellite or terrestrial networks. Although limited by distance and data rate, EM communication is crucial for short-range, high-data-rate applications and effectively complements acoustic and optical methods in hybrid underwater networks.
4.2. Challenges and Future Outlooks
Electromagnetic (EM) communications encounter substantial challenges in underwater settings due to water's physical properties. Seawater's high electrical conductivity results in significant attenuation, restricting practical propagation range at high frequencies to mere meters. For instance, at 2.4 GHz, seawater attenuation can surpass 100 dB/m, rendering high-frequency EM waves impractical for long-distance use.[23]. Energy consumption poses a significant challenge; electromagnetic wave communication systems necessitate large antennas and substantial power for reliable transmission, particularly at low frequencies to reduce attenuation, resulting in oversized and cumbersome devices [2]. This makes the technology less practical for compact or energy-constrained underwater devices such as AUVs or sensor nodes. Environmental variability complicates electromagnetic communication deployment. Factors like salinity, temperature, and pressure affect wave propagation, necessitating adaptive systems that dynamically adjust to changing conditions.
Research in underwater electromagnetic communications focuses on: (1) Low-frequency optimisation for extended range and low-power signalling. (2) Compact, efficient hardware like miniaturised antennas and low-power transceivers. (3) Hybrid systems combining electromagnetic, optical, or acoustic methods for enhanced performance. (4) AI-driven adaptive protocols to optimise power, frequency, and error correction in dynamic environments.
5. Conclusion
Underwater wireless communications are an important means of advancing marine exploration, environmental monitoring, resource management and defence applications. This paper analyses the current status, challenges and future prospects of the three main modes - optical, acoustic and electromagnetic (EM) communications. Each technology offers distinct advantages but faces limitations in underwater environments. Optical communication provides high data rates and low latency, making it suitable for short-range, high-speed applications. Acoustic communication is prevalent in underwater sensor networks and seismic monitoring due to its effectiveness in long-range communication, though it suffers from low bandwidth, high latency, and environmental noise. Electromagnetic communication, despite significant seawater attenuation, shows promise in shallow water monitoring, cross-interface communications, and surveillance. Recent advancements in compact antenna design, low-frequency optimization, and hybrid system integration have broadened its applicability, especially for short-range, high-data-rate exchanges. Hybrid underwater communication systems leverage acoustic links for long-range communication, optical systems for high-speed local data transfer, and electromagnetic channels for water-air transitions, adapting to specific needs. Integrating AI, adaptive protocols, and energy-efficient hardware enhances network reliability, scalability, and efficiency. However, potential limitations include selection bias and possibly overlooking significant unpublished or less accessible research.
References
[1]. Kaushal, H., & Kaddoum, G. (2016). Underwater Optical Wireless Communication. IEEE Access, 4, 1518-1547. https://doi.org/10.1109/ACCESS.2016.2552538
[2]. Al-Zhrani, S., Bedaiwi, N. M., El-Ramli, I. F., Barasheed, A. Z., Abduldaiem, A., Al-Hadeethi, Y., & Umar, A. (2021). Underwater Optical Communications: A Brief Overview and Recent Developments. Engineered Science, 146-186
[3]. Giuliano, G. (2019). Underwater Optical Communication Systems (pp. 1–176) [EngD Thesis]
[4]. Y. Wang, L. Tao, X. Huang, J. Shi, N. Chi, IEEE Photonics J, 2015,7, 1-7, doi: 10.1109/JPHOT.2015.2489927
[5]. Qureshi, U. M., Shaikh, F. K., Aziz, Z., Shah, S. M. Z. S., Sheikh, A. A., Felemban, E., & Qaisar, S. B. (2016). RF Path and Absorption Loss Estimation for Underwater Wireless Sensor Networks in Different Water Environments. Sensors (Basel, Switzerland), 890. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4934316/
[6]. Kumar, S., & Vats, C. (2021, May 1). Underwater Communication: A Detailed Review. Workshop on Computer Networks & Communications.
[7]. Gussen, C. M. G., Diniz, P. S. R., Campos, M. L. R., Martins, W. A., Costa, F. M., & Gois, J. N. (2016). A Survey of Underwater Wireless Communication Technologies. Journal of Communication and Information Systems, 242–255.
[8]. C. Gabriel, M. Khalighi et al., “Monte-Carlo-Based Channel Characterization for Underwater Optical Communication Systems,” J. Opt. Commun. Netw., vol. 5, no. 1, pp. 1-12, January 2013. doi: 10.1364/JOCN.5.000001
[9]. J. Simpson, “A 1 Mbps Underwater Communications System using LEDs and Photodiodes with Signal Processing Capability,” Master’s thesis, North Carolina State University, Raleigh, North Carolina, USA, 2007.
[10]. Chaudhary, S., Sharma, A., Sunita Khichar, Shah, S., Ullah, R., Amir Parnianifard, & Lunchakorn Wuttisittikulkij. (2023). A Salinity-Impact Analysis of Polarization Division Multiplexing-Based Underwater Optical Wireless Communication System with High-Speed Data Transmission. Journal of Sensor and Actuator Networks, 72–72.
[11]. Morel, A. (1974). “Optical properties of pure water and pure sea water”. In: Optical aspects of oceanography 1:1-24.
[12]. Prieur, L. and Sathyendranath, S. (1981). “An optical classification of coastal and oceanic waters based on the specific spectral absorption curves of phytoplankton pigments, dissolved organic matter, and other particulate materials”. In: Limnology and Oceanography 26:4, 671-689.
[13]. Lanbo, L., Shengli, Z., & Jun-Hong, C. (2008). Prospects and problems of wireless communication for underwater sensor networks. Wireless Communications and Mobile Computing, 977–994. www.interscience.wiley.com
[14]. P. Wang, C. Li, Z. Xu, J. Light. Technol., 2018, 36, 2627- 2637, doi: 10.1109/JLT.2018.2819985.
[15]. A. S. Hamza, J. S. Deogun, D. R. Alexander, IEEE Commun. Surv. Tutor., 2018, 21, 1346-1382, doi: 10.1109/COMST.2018.2876805.
[16]. H. C. Song, “An overview of underwater time-reversal communication,” IEEE Journal of Oceanic Engineering, vol. PP, no. 99, pp. 1-12, 2015. doi: 10.1109/JOE.2015.2461712
[17]. M. Fink, ”Time-Reversed Acoustics,” Scientific American, pp. 91-97, November 1999.
[18]. T. Kang and R. Iltis, “Fast-varying doppler compensation for underwater acoustic ofdm systems,” in Signals, Systems and Computers, 2008 42nd Asilomar Conference on, October 2008. doi: 10.1109/ACSSC.2008.5074548 pp. 933-937.
[19]. Jai Prakash Mishra, Singh, K., & Chaudhary, H. (2023). Recent advancement of AI technology for underwater acoustic communication. AIP Conference Proceedings. https://doi.org/10.1063/5.0136112.
[20]. Sahu, S. K., & Shanmugam, P. (2018). A theoretical study on the impact of particle scattering on the channel characteristics of underwater optical communication system. Optics Communications, 408(June), 3-14. https://doi.org/10.1016/j.optcom.2017.06.030
[21]. OASIS: A modular low-cost echosounder - Scientific Figure on ResearchGate. Available from: https://www.researchgate.net/figure/compares-the-acoustic-and-RF-attenuation-in-water-Notice-the-difference-in-axis-scaling_fig7_343126180.
[22]. Inácio, S., Pereira, M., Santos, H., Pessoa, L., Teixeira, F., Lopes, M., Aboderin, O., & Salgado, H. (n.d.). Antenna Design for Underwater Radio Communications.
[23]. M. F. Ali, D. N. K. Jayakody, Y. A. Chursin, S. Affes, S. Dmitry, Arch. Comput. Method. Eng., 2020, 27, 1379-1412, doi: 10.1007/s11831-019-09354-8.
Cite this article
Chang,Y. (2025). A Comprehensive Review of Underwater Optical, Acoustic, and Electromagnetic Communication. Applied and Computational Engineering,145,197-202.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Software Engineering and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Kaushal, H., & Kaddoum, G. (2016). Underwater Optical Wireless Communication. IEEE Access, 4, 1518-1547. https://doi.org/10.1109/ACCESS.2016.2552538
[2]. Al-Zhrani, S., Bedaiwi, N. M., El-Ramli, I. F., Barasheed, A. Z., Abduldaiem, A., Al-Hadeethi, Y., & Umar, A. (2021). Underwater Optical Communications: A Brief Overview and Recent Developments. Engineered Science, 146-186
[3]. Giuliano, G. (2019). Underwater Optical Communication Systems (pp. 1–176) [EngD Thesis]
[4]. Y. Wang, L. Tao, X. Huang, J. Shi, N. Chi, IEEE Photonics J, 2015,7, 1-7, doi: 10.1109/JPHOT.2015.2489927
[5]. Qureshi, U. M., Shaikh, F. K., Aziz, Z., Shah, S. M. Z. S., Sheikh, A. A., Felemban, E., & Qaisar, S. B. (2016). RF Path and Absorption Loss Estimation for Underwater Wireless Sensor Networks in Different Water Environments. Sensors (Basel, Switzerland), 890. https://www.ncbi.nlm.nih.gov/pmc/articles/PMC4934316/
[6]. Kumar, S., & Vats, C. (2021, May 1). Underwater Communication: A Detailed Review. Workshop on Computer Networks & Communications.
[7]. Gussen, C. M. G., Diniz, P. S. R., Campos, M. L. R., Martins, W. A., Costa, F. M., & Gois, J. N. (2016). A Survey of Underwater Wireless Communication Technologies. Journal of Communication and Information Systems, 242–255.
[8]. C. Gabriel, M. Khalighi et al., “Monte-Carlo-Based Channel Characterization for Underwater Optical Communication Systems,” J. Opt. Commun. Netw., vol. 5, no. 1, pp. 1-12, January 2013. doi: 10.1364/JOCN.5.000001
[9]. J. Simpson, “A 1 Mbps Underwater Communications System using LEDs and Photodiodes with Signal Processing Capability,” Master’s thesis, North Carolina State University, Raleigh, North Carolina, USA, 2007.
[10]. Chaudhary, S., Sharma, A., Sunita Khichar, Shah, S., Ullah, R., Amir Parnianifard, & Lunchakorn Wuttisittikulkij. (2023). A Salinity-Impact Analysis of Polarization Division Multiplexing-Based Underwater Optical Wireless Communication System with High-Speed Data Transmission. Journal of Sensor and Actuator Networks, 72–72.
[11]. Morel, A. (1974). “Optical properties of pure water and pure sea water”. In: Optical aspects of oceanography 1:1-24.
[12]. Prieur, L. and Sathyendranath, S. (1981). “An optical classification of coastal and oceanic waters based on the specific spectral absorption curves of phytoplankton pigments, dissolved organic matter, and other particulate materials”. In: Limnology and Oceanography 26:4, 671-689.
[13]. Lanbo, L., Shengli, Z., & Jun-Hong, C. (2008). Prospects and problems of wireless communication for underwater sensor networks. Wireless Communications and Mobile Computing, 977–994. www.interscience.wiley.com
[14]. P. Wang, C. Li, Z. Xu, J. Light. Technol., 2018, 36, 2627- 2637, doi: 10.1109/JLT.2018.2819985.
[15]. A. S. Hamza, J. S. Deogun, D. R. Alexander, IEEE Commun. Surv. Tutor., 2018, 21, 1346-1382, doi: 10.1109/COMST.2018.2876805.
[16]. H. C. Song, “An overview of underwater time-reversal communication,” IEEE Journal of Oceanic Engineering, vol. PP, no. 99, pp. 1-12, 2015. doi: 10.1109/JOE.2015.2461712
[17]. M. Fink, ”Time-Reversed Acoustics,” Scientific American, pp. 91-97, November 1999.
[18]. T. Kang and R. Iltis, “Fast-varying doppler compensation for underwater acoustic ofdm systems,” in Signals, Systems and Computers, 2008 42nd Asilomar Conference on, October 2008. doi: 10.1109/ACSSC.2008.5074548 pp. 933-937.
[19]. Jai Prakash Mishra, Singh, K., & Chaudhary, H. (2023). Recent advancement of AI technology for underwater acoustic communication. AIP Conference Proceedings. https://doi.org/10.1063/5.0136112.
[20]. Sahu, S. K., & Shanmugam, P. (2018). A theoretical study on the impact of particle scattering on the channel characteristics of underwater optical communication system. Optics Communications, 408(June), 3-14. https://doi.org/10.1016/j.optcom.2017.06.030
[21]. OASIS: A modular low-cost echosounder - Scientific Figure on ResearchGate. Available from: https://www.researchgate.net/figure/compares-the-acoustic-and-RF-attenuation-in-water-Notice-the-difference-in-axis-scaling_fig7_343126180.
[22]. Inácio, S., Pereira, M., Santos, H., Pessoa, L., Teixeira, F., Lopes, M., Aboderin, O., & Salgado, H. (n.d.). Antenna Design for Underwater Radio Communications.
[23]. M. F. Ali, D. N. K. Jayakody, Y. A. Chursin, S. Affes, S. Dmitry, Arch. Comput. Method. Eng., 2020, 27, 1379-1412, doi: 10.1007/s11831-019-09354-8.