






1. Introduction
The pantograph is a key device for urban rail transport to obtain electrical energy from the power grid, and its quality determines the power transmission and operation safety of the train [1]. According to the data released by the researchers, the failure caused by the power supply system during train operation are one third of the railway failures [2]. Therefore, the real-time and accurate monitoring of the pantograph can reduce the occurrence of railway accidents to a certain extent [3], and the recognition accuracy of the acquired image directly determines the reliability of the safety warning.
Recent efforts have been made on optimizing and improving the architectural performance of instance segmentation algorithms. Fully Convolutional Network (FCN) [4][5] achieves simple, efficient, and end-to-end semantic segmentation, but FCN cannot solve the task of instance segmentation due to the translation invariance of convolution and the inability to distinguish individual object instances. The subsequently proposed Instance FCN [6] and fully convolutional instance-aware semantic segmentation (FCIS) [7] solved this problem. Instance FCN is an architecture for improving local pixels of an image, and an instance-sensitive score map is proposed, which solves the problem of the same pixel having varied responses in different regions. However, it is not an end-to-end network architecture because it requires a scoring network for auxiliary discrimination after generating the full-instance graph. FCIS is the first fully convolutional end-to-end instance segmentation model based on Instance FCN. While using the instance-sensitive score map, it adds an internal/external score map that distinguishes the positional relationship of the same pixel in the target instance. Regions of Interest (RoI) [8][9] generated by Region Prediction Network (RPN) [10] work together and aggregate to accomplish the task of simultaneous segmentation and classification.
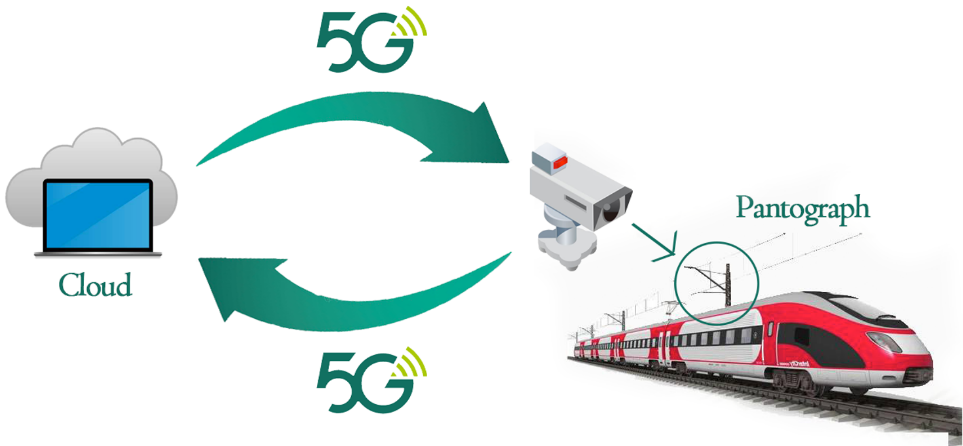
Based on the above research progress, considering that the train operating environment is complicated, and the segmentation accuracy requirement is high, a simple neural network cannot meet the work requirements. Therefore, this letter firstly uses HD cameras to obtain the pantograph image during the normal operation of the train between stations. Then the Mask R-CNN algorithm is used to segment and detect the pantograph images, and the results show that the algorithm can achieve a positive effect in different environments. Finally, this letter employs 5G signal transmission experiments to test the rate and feasibility when transmit the video data package. The system framework is shown in Fig. 1:
The status of the pantograph is captured using a high-definition camera, and the image is sent to the cloud via 5G communication. The images are processed on a cloud computer and then sent back to the train receiver via 5G communication. The purpose of real-time monitoring is realized under the processing of transmission and high-speed cloud platform.
| |
Figure 1. System framework. | |
2. Proposed method
2.1. Communication technology
The architecture of a 5G network is built on a service system, with an access network, a bearer network, and a core network. 5G networks have fast speed, high capacity, high dependability, low latency, and low power consumption when compared to previous networks.[11][12] The peak value of its base station is greater than 20 Gb/s, which improves the problem of the limited number of 4G communication connection terminals, and the uplink and downlink delays between the base station and the terminal on the user plane are both 0.5ms. In addition, 5G [13] communication solves the problem of high-power consumption by reducing signaling overhead, so that the device terminal can remain online for a long time, which provides a guarantee for high-speed transmission of data streams such as video and pictures in this letter.
2.2. Deep learning background
The goal of picture instance segmentation is to determine the object's category and precisely segment the object's shape and size. Convolutional neural networks use convolutional layers instead of fully linked layers, allowing the network to receive images of any size and retrieve the class to which each pixel belongs using abstract features.
We start by labelling the areas of the dataset that need to be identified and classed, then train the computer with a convolutional neural network to recognise the categorization. Our approach is based on the Mask-RCNN technique, which uses the region proposal network to generate a series of candidate regions before performing classification, localization, and segmentation. This is a two-stage technique for natural picture segmentation; while the convergence time is slower than the single-stage algorithm, the region proposal network has already served as a screening function, alleviating the problem of class imbalance to some extent. The purpose of this work is to use the method to find pantographs in complex natural situations, reliably classify them, and indicate their bounding boxes and masks.
Mask-RCNN is a powerful framework that can handle a wide range of image processing applications, including object detection and semantic segmentation. The backbone network used by Mask-RCNN is deep residual network, which is implemented in this research as the ResNet101+FPN model. It can extract feature maps at various stages from the input picture and uses the Feature Pyramid Network (FPN) for many tasks. The extraction of scale data, as well as its top-down and horizontal link structure, combines features from many scales, resulting in powerful semantic and spatial information. For each pixel on the feature map, a fixed number of anchor boxes is established, and several candidate regions (ROIs) of various sizes are created by computing the intersection between each anchor box and the real box depicted on the picture. Finally, the candidate ROIs are binary classified and bounding regression is performed using the region proposal network (RPN). The calculation of redundant information in the second stage is successfully reduced by filtering out ROIs with low categorization scores.
The ROIs in the original image are mapped to the pixels in the feature map one by one in the second step, and ROIs of various sizes are converted to uniform sizes. Secondly, the RoI Align technology is used to choose the region of interest, and the grayscale size on the pixel point is obtained using the bilinear interpolation approach to extract the critical feature information contained in the ROI, and to complete the classification, regression, and segmentation. The goal is to serialise the feature aggregation process as a whole. Finally, each pixel on each ROI is identified and forecasted by regression, and the final binary mask is generated by adding a segmentation branch to the fully connected layer.
The training objective of Mask-RCNN is to reduce the loss of multitask as shown in equation (1). The cost function is the sum of the errors from the class ( \( {L_{cls}} \) ), the bounding box ( \( {L_{bbox}} \) ) and the mask ( \( {L_{mask}} \) ).
\( {L_{total}}={L_{cls}}+{L_{bbox}}+{L_{mask}} \)
\( {L_{cls}}=softmas Cross Enotropy \)
\( {L_{bbox}}=Regression \)
\( {L_{mask}}=Binary Cross Enotropy\ \ \ (1) \)
3. Experiments
The experimental environment used in this letter is shown in Table 1, and the parameters in the model training process are shown in Table 2.
In this letter, a high-precision visual camera is used to collect pictures of relevant distribution lines at the uninterrupted operation site to form a data set, with a total of 1000 images in the data set. The dataset is first pre-processed, and the image size is set to 1920 pixels × 1080 pixels. Then use the labelling tool ‘LabelMe’ to manually label the data.
Table 1. Experimental setup.
Project | Model or Parameter Value |
CPU | Inteli9⁃12900k |
Memory | GB&128 |
GPU | GTX3080Ti |
Operating System | Ubuntu16.04 |
Software Environment | Anaconda3, Cuda9.0, Python3.6 |
Development tools | PyCharm |
Network Framework | TensorFlow |
Table 2. Training parameters.
Project | Model or Parameter Value |
Batch size | 10 |
Weight decay | 0.0001 |
Learning rate | 0.001 |
Number of training iterations | 400 |
4. Results
4.1. Communication method comparison
In this letter, a large number of pantograph images (1000) are collected and transmitted to the cloud computer in real time through 3G, 4G, 5G signals. The images are segmented on the cloud computer using the enhanced Mask-RCNN model, and the current pantograph is evaluated. In the British railway environment, the situation illustrates the benefits and drawbacks of each signal transmission.
| |
Figure 2. Map of the locations and average time latency of 3 technologies. | |
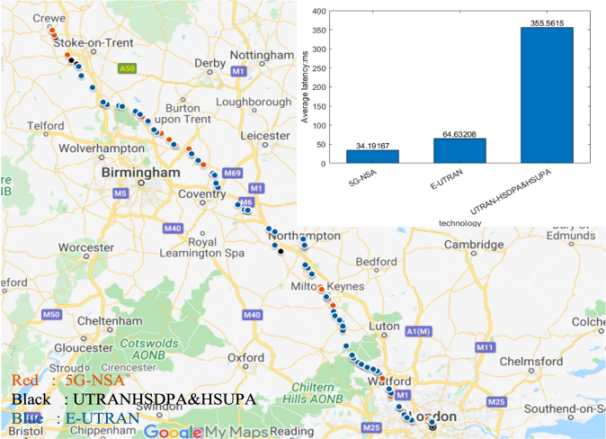
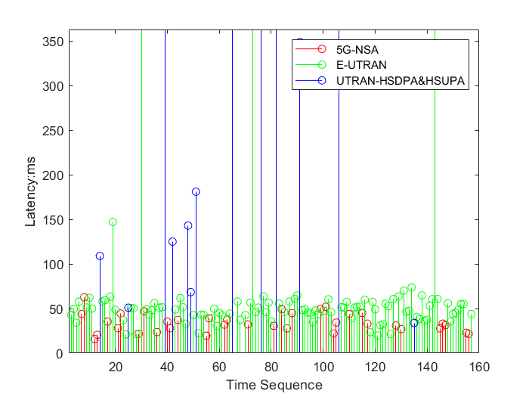
The transmission test results of high-speed trains under various technologies are firstly compared in this paper. The train travels from London to Crewe. Every 10 minutes, a video is uploaded and pinged to google.com. The software creates ‘.srt’ files and records the data including details such as latitude, longitude, and latency automatically. From the collection of ‘.srt’ files, the following results were obtained. After each 'ping,' as shown in Fig. 2 he location information is saved, and Google Map is used to display the latitude and longitude coordinates obtained using various technologies on a map. The E-UTRAN technology receives the most points, as shown in Fig. 2 This demonstrates that 4G technology is still widely used in this road section. 3G has the least number of location points, followed by 5G. It can be speculated that 5G equipment is still under construction in this road section. The average latency of the three technologies is also depicted in Fig.7, and the number of delays at each time interval in time order are shown in Fig.3. Each point corresponds to a location on the map in Fig.2. It is obvious that 5G has the shortest and most stable latency. Although 4G has a lower latency than 3G, there are still significant fluctuations. 3G has the highest average latency and fluctuations.so we use 5G to provide ultrahigh-speed links for HD video streaming and low data-rate speeds for sensor networks on the train in this project.
| |
Figure 3. Latency. | |
4.2. Recognition result
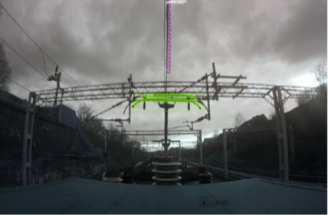
Fig. 4(a) is the pantograph recognition result in the conventional railway environment. The value in the figure represents the recognition matching degree, where the range is [0,1], and the accuracy is one thousandth. The pantograph can be accurately identified without the influence of any environmental factors, and the matching degree reaches 1, while the contact line is also successfully identified with 0.975 matching degree.
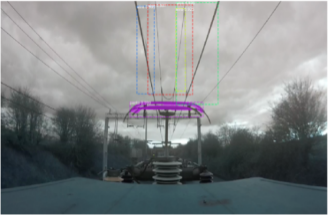
During the actual operation of the train, background interference such as load-bearing cables and high-voltage wires as shown in Fig.4(b) and 4(c) may occur. It can be seen from Fig. 4(b) that the complex environmental background will not affect the recognition of the pantograph. The recognition matching degree of the pantograph still reaches 0.999, but the recognition of the contact line in Fig.4(c) is confused.
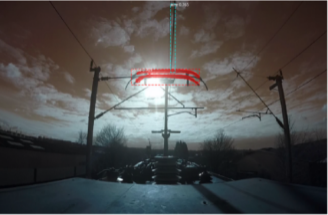
Fig.4(d) is the train passing through the tunnel, the brightness of the original image is extremely dark due to no lighting conditions. In contrast, Fig.4(e) shows the pantograph over-brightening when the train is facing the sun, in which the pantographs are vaguely visible; But the recognition matching degree of pantograph and contact line at this point still maintaining a high level which is over 0.96, except when the contact line is completely unrecognisable.
After the extensive experiments, we can conclude that the 5G signal performs significantly better than the traditional transmission method in the UK railway environment, with faster speeds and lower packet loss, and the Mask-RCNN algorithm is highly resistant to environmental conditions of extreme brightness, basically achieves real-time recognition of trains through caves, tunnels, backlighting and night-time passage and other environmental conditions., which ensures the safety of the trains.
(a)Recognition results in ordinary (b)Recognition results when passing Environment. the viaduct.
(c)Recognition results when there is (d)Recognition results when passing wire interference. through the tunnel.
(e)Recognition results under strong light conditions. | |
Figure 4. Recognition results. | |







5. Conclusion
In this paper, the experiments are carried out in real-time communication and data processing for real-time monitoring of pantographs during train operation. The transmission test of high-speed trains under different technical conditions shows that the transmission latency of 5G has been greatly improved from 0.65ms of 4G to 0.34ms. The received pantograph and contact line images are segmented by the Mask-RCNN algorithm. The results show that the algorithm has universal applicability, the matching degree of pantograph recognition under complex background conditions and different brightness conditions reaches more than 0.975. However, in the case of large environmental interference factors, there may be a slight deviation in the identification of the contact line. In the future, this design can be employed in online recognition once the UK's 5G infrastructure is complete.
Acknowledgements
The research was supported by Innovate UK “Holistic Pantograph and Overhead Line Monitoring System (HPOMS)”
The authors would also like to thank Transmission Dynamics and Angel Trains for their support and provision of data.
References
[1]. R. Girshick, “Fast r-cnn”, Proceedings of the IEEE International Conference on Computer Vision, pp.1440 – 1448, 2015.
[2]. Q. Zhang, X. Chang and S. B. Bian, "Vehicle-Damage-Detection Segmentation Algorithm Based on Improved Mask RCNN," in IEEE Access, vol. 8, pp. 6997-7004, 2020
[3]. S. Ren, K. He, R. Girshick and J. Sun, "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 6, pp. 1137-1149, 1 June 2017
[4]. F. Boccardi, R. W. Heath, A. Lozano, T. L. Marzetta and P. Popovski, "Five disruptive technology directions for 5G," in IEEE Communications Magazine, vol. 52, no. 2, pp. 74-80, February 2014
[5]. S. Kumar, A. S. Dixit, R. R. Malekar, H. D. Raut and L. K. Shevada, "Fifth Generation Antennas: A Comprehensive Review of Design and Performance Enhancement Techniques," in IEEE Access, vol. 8, pp. 163568-163593, 2020
[6]. A. Tusha, S. Doğan and H. Arslan, "A Hybrid Downlink NOMA With OFDM and OFDM-IM for Beyond 5G Wireless Networks," in IEEE Signal Processing Letters, vol. 27, pp. 491-495, 2020
[7]. S. Ren, K. He, R. Girshick and J. Sun, "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 6, pp. 1137-1149, 1 June 2017
[8]. Y. Zhang, J. H. Han, Y. W. Kwon and Y. S. Moon, "A New Architecture of Feature Pyramid Network for Object Detection," 2020 IEEE 6th International Conference on Computer and Communications (ICCC), 2020, pp. 1224-1228
[9]. K. He, X. Zhang, S. Ren, et al. “Deep residual learning for image recognition,” In Proceedings of the IEEE conference on computer vision and pattern recognition, pp.770-778, 2016.
[10]. T. -Y. Lin, P. Dollár, R. Girshick, K. He, B. Hariharan and S. Belongie, "Feature Pyramid Networks for Object Detection," 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017, pp. 936-944,
[11]. M. Overgaard Lauersen, B. Köylü, B. Haddock and J. A. Sorensen, "Kidney segmentation for quantitative analysis applying MaskRCNN architecture," 2021 IEEE Symposium Series on Computational Intelligence (SSCI), 2021, pp. 1-6
[12]. Songhui, S. Mingming and H. Chufeng, "Objects detection and location based on mask RCNN and stereo vision," 2019 14th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), 2019, pp. 369-373
[13]. X. Siheng et al., "Power Equipment Recognition Method based on Mask R-CNN and Bayesian Context Network," 2020 IEEE Power & Energy Society General Meeting (PESGM), 2020, pp. 1-5
Cite this article
Li,H.;Palacin,R.;Dlay,S. (2023). An innovative application of pantograph recognition system based on deep learning. Applied and Computational Engineering,6,827-833.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. R. Girshick, “Fast r-cnn”, Proceedings of the IEEE International Conference on Computer Vision, pp.1440 – 1448, 2015.
[2]. Q. Zhang, X. Chang and S. B. Bian, "Vehicle-Damage-Detection Segmentation Algorithm Based on Improved Mask RCNN," in IEEE Access, vol. 8, pp. 6997-7004, 2020
[3]. S. Ren, K. He, R. Girshick and J. Sun, "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 6, pp. 1137-1149, 1 June 2017
[4]. F. Boccardi, R. W. Heath, A. Lozano, T. L. Marzetta and P. Popovski, "Five disruptive technology directions for 5G," in IEEE Communications Magazine, vol. 52, no. 2, pp. 74-80, February 2014
[5]. S. Kumar, A. S. Dixit, R. R. Malekar, H. D. Raut and L. K. Shevada, "Fifth Generation Antennas: A Comprehensive Review of Design and Performance Enhancement Techniques," in IEEE Access, vol. 8, pp. 163568-163593, 2020
[6]. A. Tusha, S. Doğan and H. Arslan, "A Hybrid Downlink NOMA With OFDM and OFDM-IM for Beyond 5G Wireless Networks," in IEEE Signal Processing Letters, vol. 27, pp. 491-495, 2020
[7]. S. Ren, K. He, R. Girshick and J. Sun, "Faster R-CNN: Towards Real-Time Object Detection with Region Proposal Networks," in IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 39, no. 6, pp. 1137-1149, 1 June 2017
[8]. Y. Zhang, J. H. Han, Y. W. Kwon and Y. S. Moon, "A New Architecture of Feature Pyramid Network for Object Detection," 2020 IEEE 6th International Conference on Computer and Communications (ICCC), 2020, pp. 1224-1228
[9]. K. He, X. Zhang, S. Ren, et al. “Deep residual learning for image recognition,” In Proceedings of the IEEE conference on computer vision and pattern recognition, pp.770-778, 2016.
[10]. T. -Y. Lin, P. Dollár, R. Girshick, K. He, B. Hariharan and S. Belongie, "Feature Pyramid Networks for Object Detection," 2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2017, pp. 936-944,
[11]. M. Overgaard Lauersen, B. Köylü, B. Haddock and J. A. Sorensen, "Kidney segmentation for quantitative analysis applying MaskRCNN architecture," 2021 IEEE Symposium Series on Computational Intelligence (SSCI), 2021, pp. 1-6
[12]. Songhui, S. Mingming and H. Chufeng, "Objects detection and location based on mask RCNN and stereo vision," 2019 14th IEEE International Conference on Electronic Measurement & Instruments (ICEMI), 2019, pp. 369-373
[13]. X. Siheng et al., "Power Equipment Recognition Method based on Mask R-CNN and Bayesian Context Network," 2020 IEEE Power & Energy Society General Meeting (PESGM), 2020, pp. 1-5