






1. Introduction
When one thinks of positioning systems, names like GPS and the Beidou satellite system immediately spring to mind. These systems are renowned for their expansive coverage and high accuracy, finding applications in countless domains globally. While satellite positioning is adept at addressing outdoor positioning challenges, its signal strength and quality deteriorate significantly in indoor and obstructed environments [1]. As contemporary society advances, technologies such as the Internet of Things, smart mobile devices, and mobile computing have seen rapid growth. Given the proliferation of expansive building structures and the prevalence of indoor activities, there is a burgeoning demand for indoor positioning services. In today's context, there's a pressing need for consistent, uninterrupted, and efficient positioning within indoor spaces.
2. Typical positioning methods
2.1. Current mainstream indoor positioning technology
Through the research in recent years, it is found that: In the past ten years, the rapid development of indoor space positioning technology has gradually broken through the technical and application limitations of "specific equipment, specific technology, high cost", and gradually developed to the direction of universal positioning, low-cost positioning, and high-precision positioning.
At present, the typical methods of indoor positioning technology include the following methods. Ultra wideband (UWB), Bluetooth, ultrasonic, infrared, Radio frequency identification technology (RFID), WiFi, ZigBee, etc.
2.1.1. WiFi positioning technology. Through the use of a wireless local area network (WLAN), it's possible to gather signal intensity information at wireless access points or network cards. This data can then be processed using signal intensity matching algorithms to facilitate localization, monitoring, and tracking within intricate and expansive spatial environments across various application domains [2]. Due to its extended range and ease of use, WiFi technology has emerged as a preferred indoor positioning solution over other wireless Ethernet options.
2.1.2. Bluetooth positioning technology. Bluetooth indoor positioning system equipment has the characteristics of small size and easy integration [3], so it is easy to popularize and apply.
2.1.3. UWB Positioning Technology. UWB technology has the characteristics of fast transmission speed, small transmission energy consumption, large penetration, good security and strong anti-interference ability [4]. The physical characteristics of UWB technology enable it to achieve efficient and accurate positioning in complex indoor environments without complete masking.
2.1.4. RFID. Radio Frequency Identification (RFID) is a simple and suitable technology in the field of automatic control. The longest working distance of RFID positioning technology is tens of meters, the signal transmission range is large, and the positioning system cost is small. It has mature application and good prospect in material control and personnel control [5].
2.1.5. Infrared positioning technology. High power consumption, easy to be affected by obstacles, short transmission distance, complex positioning and other disadvantages, in the availability and practicability of other positioning technology has a big gap, in the actual engineering application.
2.1.6. Ultrasonic positioning technology. The accuracy is high, but the attenuation of ultrasonic wave in the signal transmission process is more obvious, which will affect the coverage of ultrasonic positioning. And ultrasonic technology costs more. Therefore, in the application, ultrasonic positioning technology is often integrated with radio frequency identification positioning technology, which can reduce the cost and greatly reduce the energy consumption.
2.1.7. ZigBee positioning technology. ZigBee technology, which is characterized by low power consumption, can well meet the application needs of indoor positioning system. In addition, ZigBee positioning requires high network stability and is easily affected by the surrounding environment.
2.1.8. Summary. Each of these technologies has its own advantages and disadvantages, which are pointed out in Table1.
Table 1. Comparison of Indoor Positioning Technologies.
Technology | Accuracy | Safety | Penetrability | Immunity | consumption | Transfer rate | Distance | Construction cost |
WiFi | 5-10m | low | poorer | stronger | higher | Close to the highest 300Mbps | 30m | lower |
bluetooth | 2-10m | Extremely high | good | weaker | lower | 0.7-2Mbps | 10m | low |
UWB | 6-15cm | Extremely high | good | strong | low | Close up to reach1Gbps | 80m | high |
RFID | Regional positioning | Lower | poor | weak | lowest | Two-way communication is not supported | 5m | lowest |
infrared | 5-10cm | high | poor | strong | high | not have | near | high |
ultrasonic | 1-10cm | high | poor | strong | high | not have | near | high |
ZigBee | 3-5m | Extremely high | good | stronger | low | 250Kbps | 70m | low |
2.2. Indoor positioning technology of multi-sensor combination
Through the comparison of the above classic indoor positioning technologies, it is not difficult to find that these indoor positioning technologies have more or less their own obvious advantages and disadvantages. And how to deal with and solve these shortcomings? It is not difficult to imagine that combining a variety of technologies to complement each other is a very good solution.
2.2.1. Indoor positioning device based on radio frequency and ultrasound. Earlier, there was a discussion about ultrasonic positioning technology and its integration with radio frequency technology. This experimental work was spearheaded by Gu Mingxing, Zhang Hao, and Chan Haiyang [6]. For their experiment, they equipped a vehicle with a target ultrasound, a single-chip processor, and a radio frequency module. This configuration enabled the AGV vehicle to be located in real-time by transmitting an ultrasonic signal, interfacing with the positioning module, and undergoing data processing. Upon receiving a ranging request from the vehicle module, the positioning sub-module awaits the incoming ranging ultrasonic signal. Once initiated by the start and positioning commands, the ultrasonic signal is continuously transmitted. Receipt of this ranging ultrasonic signal prompts an external interrupt in the MCU processor. This action diverts the system to an external interrupt subroutine where the current value of a universal timer, R, is recorded. This value, R, represents the propagation time of the ranging ultrasonic signal. Subsequently, the positioning module computes the distance between the target ultrasonic wave and the positioning ultrasonic wave based on R. The calculated distance, coupled with the identification address of the positioning ultrasonic wave, is then relayed to the vehicle module through the radio frequency module. By gauging the relative distance between the target ultrasonic wave and the three positioning submodules, the vehicle's spatial relative position can be discerned. Once this step concludes, the precise location of the target ultrasonic is determined. By choosing an apt positioning step size, the positioning data from discrete position points in continuous time is aggregated, facilitating the arbitrary trajectory planning of the vehicle [7].
Table 2. Comparison between Experimental Results and Actual Distance.
Actual position/cm | Measurement position/cm | Relative average deviation/% | Standard deviation |
(194.10,88.50,10.50) | (194.01,88.73,10.31) | (0.12,0.51,0.33) | (0.29,0.68,0.42) |
(67.80,95.00,10.50) | (67.83,95.28,10.67) | (0.06,0.24,0.19) | (0.05,0.30,0.25) |
(130.50,246.80,10.50) | (130.67,246.97,10.57) | (0.24,0.05,0.13) | (0.39,0.19,0.20) |
(271.50,240.50,10.50) | (271.35,240.83,10.83) | (0.13,0.12,0.37) | (0.60,0.39,0.55) |
(272.00,180.00,10.50) | (272.28,180.21,10.18) | (0.04,0.17,0.55) | (0.18,0.39,0.36) |
(148.00,207.50,10.50) | (148.89,207.66,10.45) | (0.14,0.10,0.28) | (0.25,0.25,0.27) |
As can be seen from Table 2, the experimental results are almost same with the actual distance, and the positioning function is successfully realized while the cost is reduced.
2.2.2. Fusion of nertial navigation and UWB. Inertial navigation has strong anti-interference characteristics and good stability. However, errors increases over time during operation. UWB has the characteristics of good anti-interference ability and High precision positioning. However, due to harsh indoor environments and interference, the signal may experience problems such as lack of line of sight during transmission. Therefore, inertial navigation behavior can be used to reduce UWB environmental interference errors, and the advantages of high UWB performance can be used to reduce inertial navigation errors [8].
In practice, a placement sticker was attached to the placement container. The vehicle is controlled by a motion capture system based on feed path coordinate feedback. In the test, the car moved at a speed of 0.05 m/s, and at this speed, the car's movement accuracy could reach the level of one centimeter. The placeholder attached to the cart is equipped with a USB port. Place a reflection marker in the location tag recognized by the motion capture system. As shown in Figure 1 and 2.
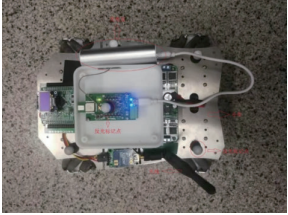
Figure 1. Solid diagram (Photo/Picture credit: Original).
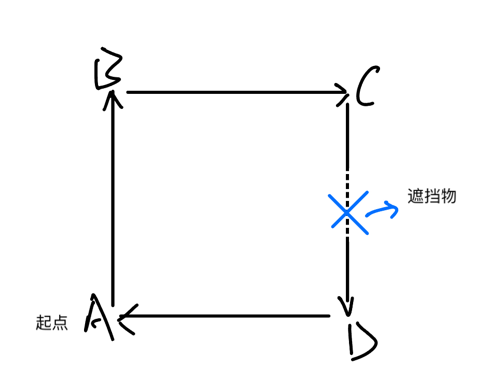
Figure 2. Floor plan (Photo/Picture credit: Original).
Car moves on a rectangular track measuring 1.2m×1.2m at the test location. As shown in Figure 3, the car starts move from A, moves 1.2 m to B, then 1.2 m to C, and 1.2 m to D, finally moving to A returns. In the experimental results, the trajectory Marks the reflection obtained from the motion capture system at the center of the positioning tag. And add a shadow between C and D.
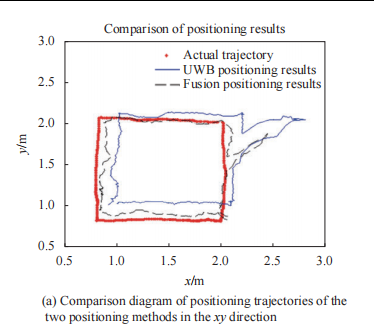
Figure 3. Test chart (Photo/Picture credit: Original).
As can be seen from Figure 4, the red is the real vehicle, the blue solid line is the path of the test site created by UWB alone, and the double dashed black line is the path of the UWB fusion method. and inertial navigation. Obviously, the experimental error is reduced by the fusion method.
2.2.3. Fusion positioning based on visual positioning and inertial positioning. In visual perception, as the number of frames increases, the accumulation of errors in one frame further reduces the correct location. In case of insufficient or too strong external light, an algorithm based on the extraction and registration of characteristic points can lead to the failure of a weak work of visual processing. In terms of processing speed, due to the large amount of image data to be written per frame, the degree of parallel processing is low, which cannot improve the processing speed, which limits the actual response time to high output. right place. In contrast, the inertial measurement unit has a simple real-time and all-weather fully autonomous navigation function, although there is the problem of positioning error accumulation, but it has the ability to compensate for the error position and error. In Li Huixia's experiment, they set three test points in the test area (0.0) (5.61, 0.01) and (5.60, 5.61) meters.
Table 3. Comparison of the Positions of Visual Inertial Combination Positioning Points and Control Points.
Comparison of the positions of visual positioning points and control points (m) | |||
Control point serial number | 1 | 2 | 3 |
Control point coordinates | (0,0) | (5.61,0.01) | (5.60,5.61) |
Visual positioning coordinates | (0,0) | (5.321,0.0062) | (5.5248,4.8182) |
Distance (positioning error) | 0 | 0.2890 | 0.7954 |
Comparison of the Positions of Visual Inertial Combination Positioning Points and Control Points(m) | |||
Control point serial number | 1 | 2 | 3 |
Control point coordinates | (0,0) | (5.61,0.01) | (5.60,5.61) |
Visual positioning coordinates | (0,0) | (5.4042,0.0043) | (5.542,5.0151) |
Distance (positioning error) | 0 | 0.2058 | 0.6005 |

Figure 4. Experimental diagram (Photo/Picture credit: Original).
From Table 3, compared to the pure vision, the positioning accuracy obtained by the fusion positioning method is higher, the error of the vehicle moving from control point 1 to control point 2 according to the way down to 0.2058 meters, and positioning is increased by 1.48%. The error of turning between control point 2 and moving to control point 3 is reduced to 0.6005 meters and the location accuracy is improved by 3.47%. By comparing the location results, it can be seen that the combination and positioning algorithm based on the Kalman filter algorithm can help solve the error of the pure optical otometer positioning method. and further prove that many combinations of methods can improve the error.
3. Application scenarios of the indoor positioning technology
3.1. Application of indoor location Service
In our daily life, shopping is something we all have to do. Compared with online shopping on the Internet, a large number of people choose to go to shopping malls or supermarkets. The audience of indoor positioning technology in shopping can be completely not divided into two categories [9]:
(1) Shopping mall customers: Through the use of mobile phone clients, customers can get the goods and activity information pushed by the shopping mall, and carry out indoor positioning and navigation with the help of positioning module, and their trajectory information will be recorded and analyzed.
(2) Mall management personnel: Through the background management system, the management personnel manage the products, promotional activities, maps and iBeacon node information in the system to optimize the layout of the mall and better guide customer consumption.
3.2. Location of rolling track in tunnel environment
The real-time location and monitoring technology of roller rolling track in tunnel has always been an important research topic for researchers [10]. The traditional GPS positioning method is difficult to receive the satellite signal, so it can not realize the accurate positioning and monitoring of the roller rolling track. Therefore, indoor positioning technology can provide better security for construction personnel in long-distance tunnels.
In addition, indoor positioning technology is also widely used in: public security scenario applications, intelligent transportation and other fields.
4. Conclusion
4.1. Existing Challenges
Positioning accuracy. Different application scenarios have different requirements on the positioning accuracy of indoor space positioning system. If you are looking for a specific product in a large mall or supermarket, you may need 1m or more precision requirements; If the vehicle is found in the underground parking lot, the accuracy requirements of 2 to 5 m can meet the application.
Coverage. Coverage refers to the area in which the technology solution can provide positioning services that meet the positioning accuracy requirements. In some scenarios, the indoor spatial positioning system terminal needs the support of the corresponding infrastructure; In this case, the coverage of the indoor space positioning system will be restricted accordingly.
Locating cost. The cost of interior space positioning generally includes two parts. Part is the cost of the interior space positioning system terminal; In engineering applications, it is necessary to consider the control of acceptable hardware equipment; The other part is the cost of indoor space positioning system layout and maintenance, which are issues that need to be considered.
4.2. Outlook for the future
Development of hybrid positioning technology. At present, the characteristics of a single indoor space positioning technology, the integration of multiple indoor space positioning technologies, so as to achieve complementary advantages is an important development direction. At present, this development direction still faces some problems to be solved, such as the unification of various technical data models and communication standards, the convergence between various technologies, and the cost, power consumption, response time and other problems after the integration of multiple technologies.
Optimization and update of indoor positioning technology. With the development of technologies such as artificial intelligence, computer vision, the Internet of Things, and 5G communication networks as technical support. The introduction of artificial intelligence, neural networks and other related algorithms, thus forming an innovative indoor positioning algorithm is also
References
[1]. Zhang, Y. (2014). Research on key technologies of indoor positioning [Dissertation]. University of Science and Technology of China.
[2]. Yang, C., & Shao, H.-r. (2015). WiFi-based indoor positioning. IEEE Communications Magazine, 53(3), 150-157.
[3]. Rida, M. E., Liu, F., Jadi, Y., Algawhari, A. A. A., & Askourih, A. (2015). Indoor location position based on Bluetooth signal strength. 2015 2nd International Conference on Information Science and Control Engineering, 769-773.
[4]. Alarifi, A., Al-Salman, A., Alsaleh, M., Alnafessah, A., Al-Hadhrami, S., Al-Ammar, M. A., & Al-Khalifa, H. S. (2016). Ultra-wideband indoor positioning technologies: Analysis and recent advances. Sensors, 16(5), 707.
[5]. Saab, S. S., & Nakad, Z. S. (2011). A standalone RFID indoor positioning system using passive tags. IEEE Transactions on Industrial Electronics, 58(5), 1961-1970.
[6]. Gu, X., Zhang, H., Chen, H., & others. (2019). Indoor positioning device based on radio frequency and ultrasound. Journal of Beijing Institute of Graphic Communication, 27(10), 113-117.
[7]. Yan, L., Qingdong, Z., Ning, Z., & others. (2021). Indoor location method based on UWB and inertial navigation fusion. Infrared and Laser Engineering, 50(9), 20200484-1-20200484-14.
[8]. Li, H. (2021). Research on indoor positioning method based on multi-sensor combination [Dissertation]. Nanchang University.
[9]. Xi, W. (2018). Design and implementation of supermarket mobile shopping guide system based on indoor positioning [Dissertation]. Xidian University.
[10]. Wu, Z. (2023). Research on real-time positioning and monitoring technology of tunnel asphalt pavement rolling trajectory based on ZigBee technology [Dissertation]. Chongqing Jiaotong University.
Cite this article
Zhang,J. (2024). Analysis and applications of prominent indoor positioning techniques. Applied and Computational Engineering,46,254-260.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Zhang, Y. (2014). Research on key technologies of indoor positioning [Dissertation]. University of Science and Technology of China.
[2]. Yang, C., & Shao, H.-r. (2015). WiFi-based indoor positioning. IEEE Communications Magazine, 53(3), 150-157.
[3]. Rida, M. E., Liu, F., Jadi, Y., Algawhari, A. A. A., & Askourih, A. (2015). Indoor location position based on Bluetooth signal strength. 2015 2nd International Conference on Information Science and Control Engineering, 769-773.
[4]. Alarifi, A., Al-Salman, A., Alsaleh, M., Alnafessah, A., Al-Hadhrami, S., Al-Ammar, M. A., & Al-Khalifa, H. S. (2016). Ultra-wideband indoor positioning technologies: Analysis and recent advances. Sensors, 16(5), 707.
[5]. Saab, S. S., & Nakad, Z. S. (2011). A standalone RFID indoor positioning system using passive tags. IEEE Transactions on Industrial Electronics, 58(5), 1961-1970.
[6]. Gu, X., Zhang, H., Chen, H., & others. (2019). Indoor positioning device based on radio frequency and ultrasound. Journal of Beijing Institute of Graphic Communication, 27(10), 113-117.
[7]. Yan, L., Qingdong, Z., Ning, Z., & others. (2021). Indoor location method based on UWB and inertial navigation fusion. Infrared and Laser Engineering, 50(9), 20200484-1-20200484-14.
[8]. Li, H. (2021). Research on indoor positioning method based on multi-sensor combination [Dissertation]. Nanchang University.
[9]. Xi, W. (2018). Design and implementation of supermarket mobile shopping guide system based on indoor positioning [Dissertation]. Xidian University.
[10]. Wu, Z. (2023). Research on real-time positioning and monitoring technology of tunnel asphalt pavement rolling trajectory based on ZigBee technology [Dissertation]. Chongqing Jiaotong University.