






1. Research Background
With the intensification of the aging population issue in our country, an increasing number of elderly people are plagued by lower limb motor disorders caused by strokes, spinal cord injuries, and brain injuries [1-3]. The problems of reduced lower limb function and declining mobility among the elderly are becoming increasingly prominent. Under the global trend of population aging, lower limb exoskeleton robots are expected to become an important tool in the field of elderly rehabilitation, providing better rehabilitation services for the elderly, improving their quality of life and self-care ability, and thereby better addressing the challenges brought about by population aging. Traditional rehabilitation methods require a large investment of human and material resources, and some regions face a shortage of medical personnel, making it difficult to meet the growing demand for rehabilitation. This uneven distribution of medical resources exacerbates the imbalance in rehabilitation services. Therefore, seeking an efficient and reliable rehabilitation assistance solution is urgent. Compared with traditional rehabilitation methods, lower limb exoskeleton robots can assist in rehabilitation training, helping patients to perform repetitive rehabilitation exercises [4-6]. At the same time, lower limb exoskeleton robots can reduce the workload of medical staff, save labor costs, and alleviate the problem of physician resource shortages. The emergence of lower limb exoskeleton robots can promote the development of personalized treatment. Robots can be adjusted during treatment based on the individualized conditions of patients, providing more accurate and effective rehabilitation treatment.
2. Current Research Status at Home and Abroad
2.1. International Research Status
Internationally, exoskeleton robots have been under development for a significantly longer time than in China. Among the industry leaders is the Lokomat, a walking rehabilitation training robot system co-developed by the University of Zurich and the Swiss Federal Institute of Technology [7]. Their first robot was introduced as early as 1990. After many years of improvement, their rehabilitation robot now mainly consists of a body-weight support platform, mechanical legs, and a treadmill, as shown in Figure 1(a). Each mechanical leg is equipped with straps to secure the patient's legs, with motors at the hip and knee joints driving the movement through a combination of motors and ball screw mechanisms. The body-weight support system primarily supports part of the patient's weight, and the treadmill provides a platform to assist with foot and ankle movements. Lokomat robots require a specific space for use, while the ReWalk lower limb exoskeleton robot by Israel's ReWalk Robotics can be carried personally, as shown in Figure 1(b) [8]. It also employs active drives at the hip and knee joints, with servo rod-shaped motors combined with bevel gear reducers to deliver the required torque. A unique feature is its sensors at the torso, capable of detecting the user's movement path, thus allowing the joint motors to drive human movement based on sensor data.
Japan's representative lower limb exoskeleton robot, HAL (hybrid assistive limb), as shown in Figure 1(c), features servo motors equipped with harmonic gear reducers at the hip and knee joints, and a controller located above the mechanical legs that transmits the torque required for human movement from electromyographic signal sensors to the servo motors [9].
The MotionMaker lower limb rehabilitation robot developed by Switzerland's SWORTEC, shown in Figure 1(d), is a sitting/lying robot consisting of two 3-DOF mechanical arms and a seat [10]. It features functional electrical stimulation training modes, able to adopt different rehabilitation modes such as passive and active training depending on the patient's rehabilitation phase. However, its compatibility with different patient sizes is manually adjusted, which can be cumbersome for physicians. Training in sitting/lying positions, compared to most standing rehabilitation robots, offers more comfort and safety, leading to higher patient satisfaction. Yet, its therapeutic efficacy requires further validation.
eLEGS, developed by the Human Engineering Laboratory at the University of California, Berkeley, shown in Figure 1(e), resembles the ReWalk robot in appearance and structure [11]. However, it differs in its use of hydraulic drives at the knee and hip joints, providing significant power, quick response, stable transmission, and compact structure, albeit with higher noise, potential for environmental pollution due to leaks, and higher maintenance costs. Hence, most lower limb exoskeleton robots on the market prefer motor drives.
Ekso Bionics in the United States developed the Ekso lower limb rehabilitation exoskeleton, as shown in Figure 1(f), with an active drive degree of freedom at each hip and knee joint along the sagittal plane of the patient's body [12]. Its driving mechanism uses hydraulic cylinders to achieve the flexion and extension of the hip and knee joints. This system's distinction lies in its capacity to upload users' motion data and generate personalized rehabilitation plans after analysis.
The University of Twente in the Netherlands designed the LOPES lower limb rehabilitation exoskeleton system, shown in Figure 1(g) [13]. LOPES exhibits a low apparent impedance, with three passive degrees of freedom at its pelvis for hip movements, including two degrees of freedom at each hip joint for anterior-posterior flexion-extension and one for abduction-adduction. The knee joint allows for flexion-extension. They all employ an improved series elastic actuator as a torque driver.
Lastly, the Indego Therapy lower limb rehabilitation exoskeleton system, designed and manufactured by Indego in the United States, is shown in Figure 1(h). Each mechanical leg includes a powered hip and knee joint, each driven by a brushless DC motor coupled with a transmission mechanism, capable of continuously outputting 12N·m torque, with a maximum instantaneous output torque of 40N·m [14].
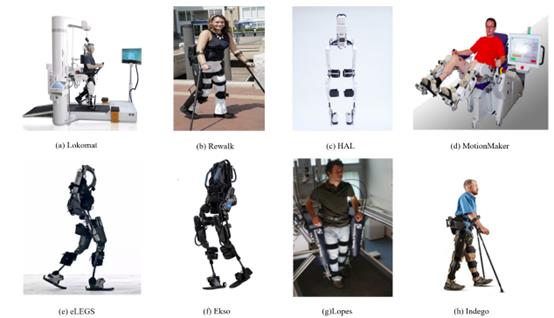
Figure 1. Representative international lower limb exoskeleton robots.
(a) Lokomat exoskeleton robot, (b) ReWalk exoskeleton robot, (c) HAL lower limb exoskeleton robot, (d) MotionMaker lower limb exoskeleton robot, (e) eLEGS lower limb exoskeleton robot, (f) Ekso lower limb exoskeleton robot, (g) Lopes lower limb exoskeleton robot, (h) Indego lower limb exoskeleton robot.
2.2. Domestic Research Status
Although research on exoskeleton robots in China started later than in other countries, there has been significant progress in the field of lower limb exoskeleton robots in recent years. Most of the robots researched domestically are driven by motors, but there are special cases, such as the lower limb exoskeleton robot from Southeast University shown in Figure 2(a) [15]. It grants one degree of freedom to the hip, knee, and ankle joints on the sagittal plane of the human body to perform flexion and extension movements. Unlike most exoskeleton robots, it employs hydraulic drive as its active drive method. Additionally, it adds a degree of freedom at the hip joint for adduction and abduction movements, and the ankle joint also has degrees of freedom for inversion and eversion, all using passive driving methods.
The exoskeleton robot from Harbin Institute of Technology shown in Figure 2(b) has two degrees of freedom at the hip joint: one for abduction and adduction movements along the coronal plane of the body, and another for lifting movements along the horizontal plane [16]. The knee joint is responsible for flexion and extension movements. Unlike the robot from Southeast University, its active drive method uses motor drive, and the flexion and extension degree of freedom at the ankle joint uses a spring compression drive method. In terms of control strategy, it employs a direct force control method based on human-machine interaction force. This exoskeleton system can adapt to different road conditions, is powered by batteries, and has a battery life of up to 4.5 hours.
Beihang University successfully developed a lower limb exoskeleton robot named AiLegs in 2014, shown in Figure 2(c). Its motors are located at the knee and hip joints, driving these two joints to perform abduction and adduction movements through a screw-nut mechanism [17]. The AiWalker lower limb exoskeleton robot, as shown in Figure 2(d), is an innovative development by Beihang University based on this [18]. Named AiWalker, this new type of exoskeleton robot combines AiLegs with a four-wheeled balance moving frame, stabilizing the patient's waist through special design to achieve balance control during movement and meet the support and weight reduction needs during training. This design not only ensures the safety of patients during training but also provides them with a walking rehabilitation training experience based on real ground. AiWalker is widely applicable, suitable for long-term rehabilitation cycles, and can effectively treat patients with paraplegia, quadriplegia, and lower limb motor dysfunction caused by spinal cord injury or brain injury. Additionally, the device can also provide effective rehabilitation support for patients with weak early active movement functions. By combining technological innovation with the medical field, this research achievement offers a safer, more intelligent rehabilitation treatment method, potentially bringing positive impact and innovation to the field of rehabilitation medicine.
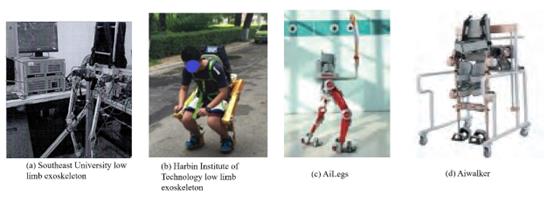
Figure 2. Representative domestic lower limb exoskeleton rehabilitation robots.
(a) Southeast University lower limb exoskeleton, (b) Harbin Institute of Technology lower limb exoskeleton, (c) AiLegs, (d) AiWalker.
3. Key Technologies
3.1. Degrees of Freedom in Human Lower Limb Motion
The movement of the human lower limbs is achieved through joint rotation, involving the hip, knee, and ankle joints. The hip joint possesses three degrees of freedom: flexion/extension around the coronal axis, abduction/adduction around the sagittal axis, and external/internal rotation around the vertical axis. The knee joint, being a complex spherical joint in the human body, is usually considered to have a single degree of freedom, which is the flexion/extension movement on the sagittal plane. The ankle joint has three degrees of freedom, which include inversion/eversion rotation, dorsiflexion/plantarflexion, and a minor amount of abduction/adduction movement. The hip joint, as a triaxial joint, includes three degrees of freedom capable of performing flexion/extension, abduction/adduction, and internal/external rotation movements; the knee joint, serving as a complex motion joint connecting the femur and tibia, contains only one degree of freedom for flexion/extension movements; the ankle joint, formed by the tibia, fibula, and talus, includes three degrees of freedom for dorsiflexion/plantarflexion, internal/external rotation, and inversion/eversion movements.
Table 1. Range of Motion for Human Lower Limb Movements
| Movement Joint | Movement Type | Range of Motion |
| Hip Joint | Flexion/Extension | -120°~ 65° |
| Abduction/Adduction | (-30° ~ -35°)~ 40° | |
| Internal/External Rotation | (-15° ~ -30°)~ 60° | |
| Knee Joint | Flexion/Extension | (120° ~160°)~ 0° |
| Dorsiflexion/Plantarflexion | (-20°) ~ (40°~ 50°) | |
| Ankle Joint | Internal/External Rotation | (-15°) ~ (30°~50°) |
| Inversion/Eversion | (-35° ~ -35°) ~ (15°~20°) |
3.2. Human Gait Motion
Walking, a fundamental movement in daily life, is characterized by its gait. Periodicity and repetitiveness are unique attributes of normal human gait, meaning that during the walking process, the distance moved and time consumed by the left and right feet are basically the same, with each joint exhibiting similar and repetitive motion patterns, primarily manifesting as coordinated flexion/extension movements of the hip, knee, and ankle joints. The main goal of lower limb exoskeleton rehabilitation robots is to assist patients in achieving normal human gait walking, making it particularly important to help patients with high-quality and efficient rehabilitation walking training.
A complete gait cycle includes a stance phase and a swing phase. The stance phase refers to the stage from heel contact with the ground to toe-off, approximately accounting for 60% of a complete gait cycle; the swing phase refers to the stage from toe-off to heel contact with the ground again, approximately accounting for 40% of a complete gait cycle. Additionally, the stance phase is divided into a double-support period and a single-support period, with the double-support period occurring twice within a gait cycle, totaling approximately 20% of a complete gait cycle. During this period, the human walking state is most stable.
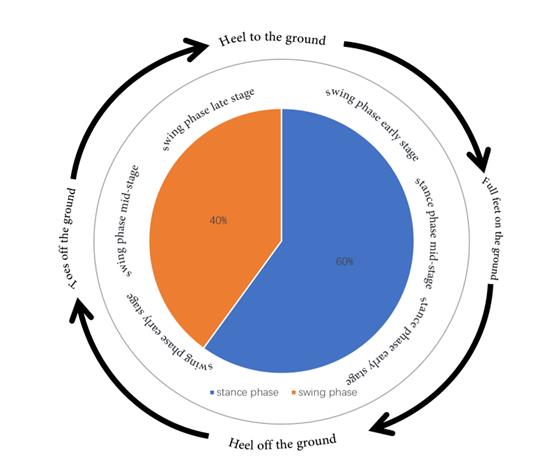
Figure 3. Human Gait Motion Cycle
3.3. Structural Design of Lower Limb Exoskeleton Robots
The movement of the human lower limbs is achieved through joint rotation, involving the hip, knee, and ankle joints. The unilateral degrees of freedom for the human lower limb are seven, consisting of three degrees of freedom for the hip joint (flexion/extension, internal/external rotation, abduction/adduction), one for the knee joint (flexion/extension), and three for the ankle joint (inversion/eversion, dorsiflexion/plantarflexion, and fore-aft tilt). However, most robots utilize two degrees of freedom for the hip joint and one for the knee joint. Next comes the actuation device; for the rotation of the hip joint, one end of the actuator is connected to the mechanical leg base, and the other end is connected to the thigh rod. For the rotation of the knee joint, one end of the actuator is connected to the thigh rod, and the other end is connected to the lower leg rod. Transmission tools are also crucial for lower limb exoskeleton robots, namely, the method of force transmission. Depending on the type of force transmission, common methods include gear transmission, Bowden cable transmission, and screw-nut mechanisms. Taking motor drive as an example, typically, the motor drives a ball screw to rotate via belts or other transmission mechanisms, converting the motor's rotary motion into linear motion of the screw. The extension and retraction of the screw effect changes in joint angle. Designing a lower limb exoskeleton robot also requires a framework that provides sufficient strength and rigidity, while also considering lightness and comfort to ensure the wearer's comfort and flexibility.
3.4. Drive Methods of Lower Limb Exoskeleton Robots
With current technology, there are generally three types of drive methods for lower limb exoskeleton robots: electric motor drive, pneumatic drive, and hydraulic drive. When using electric motor drive, direct current (DC) motors or stepper motors are commonly used. DC motors provide efficient rotational force and can achieve precise speed and position control through electronic control systems. Stepper motors move in fixed step angles, suitable for applications requiring discrete movements. Motor drive can deliver substantial power output and quick response, suitable for lower limb exoskeleton robots that require strong power support. Pneumatic drive, currently less commonly used, operates by controlling the opening and closing of air valves to achieve the extension and flexible movement of exoskeleton components. The pneumatic system has a relatively simple structure, using gas as the medium, but due to the compressibility of gas, it provides less power compared to the other two drive methods. Finally, there is the hydraulic drive method, which typically consists of a hydraulic pump, hydraulic cylinders, control valves, and hydraulic oil. When the hydraulic pump delivers high-pressure hydraulic oil to the hydraulic cylinder, the control valve adjusts the flow and pressure of the hydraulic oil according to external input signals, thereby controlling the movement of the hydraulic cylinder. By adjusting the workload of the hydraulic pump, the opening and closing state of the control valve, and the design of the hydraulic cylinder, precise control of the hydraulic system can be achieved, thereby enabling the movement of the exoskeleton. Its advantages include a higher power density, relatively small size, sufficient power output, and fast response. However, hydraulic systems are prone to leaks and complex to model, making precise control challenging. Therefore, overall, electric motor drive offers a simple, compact structure, ease of motor modeling, mature methodologies, quick response, and high control precision, which is why it remains the predominant choice for most robots.
3.5. Interaction Control of Lower Limb Exoskeleton Robots
The interaction control of lower limb exoskeleton robots, serving as the human-machine interface that connects humans with the external mechanical structure, is crucial for achieving stable, coherent, and real-time control of the exoskeleton robot. Currently, methods used for human-machine interaction globally can be summarized into two categories: interaction based on human-machine force information and interaction based on bioelectrical signals.
The essence of force/position hybrid control is to decompose the coordinate space when the robot contacts an unknown environment into two orthogonal subspaces, achieving trajectory control of both force and position separately. Through force sensors, exoskeleton robots can measure in real-time the force exerted by users. These force signals are then captured and converted into inputs understandable by the control algorithm. Additionally, there's position control, where the exoskeleton robot uses sensors (such as gyroscopes, accelerometers, and encoders) to monitor the user's body movements and adjust the exoskeleton's posture in real-time to match the user's intent. This dual control complements each other, laying the foundation for force/position hybrid control. This method allows users to manipulate the robot by exerting external forces or changing postures, making the robot better adapt to the user's intent and environmental changes.
Compared to force/position hybrid control, impedance control focuses more on achieving active compliance control of the robot. In impedance control, the movement characteristics of the robot are determined by three key parameters: stiffness, damping, and inertia. Firstly, stiffness refers to the robot's resistance to external forces, i.e., the degree of deformation when subjected to external forces. In impedance control, adjusting the stiffness parameter allows the robot to exhibit different levels of compliance when handling various tasks, thereby achieving better adaptability. Secondly, damping refers to the robot's ability to dissipate energy during movement. Proper damping can enable the robot to respond smoothly to external interventions, reducing oscillations and overshoots. By setting appropriate damping parameters, the robot's movements can become smoother and more precise, providing good adaptability for different operating environments. Lastly, inertia represents the inertial mass the robot has during movement. Appropriate inertia parameter design helps maintain stability in the robot's movements and affects the robot's response speed to external forces. Adjusting the inertia parameters allows the robot to exhibit suitable force/position response characteristics at different speeds.
Bioelectrical signals are weak electrical signals emitted by biological bodies, mainly used in lower limb rehabilitation exoskeleton robots, including surface electromyography (sEMG) signals and electroencephalography (EEG) signals. EEG signals, the weak signals produced by neuronal activities in the brain, can be captured by placing electrodes on the scalp. However, since the brain, as the center of the human nervous system, emits very rich and complex electrical signals, research on EEG-based human-machine interaction primarily focuses on offline classification, recognition, and simple upper limb motion control. Although research has indicated the potential of EEG signals in controlling lower limb exoskeleton robots, practical online experimental results are still insufficient, and there are challenges in application. Capturing sEMG signals requires electrodes placed on the skin surface to receive muscle electrical activity signals. When muscles contract or relax, neurons within the muscle emit electrical signals that propagate along muscle fibers, ultimately causing muscle contraction. Typically, capturing sEMG signals involves using two electrodes, one to record the signal and the other as a reference electrode, fixed on the muscle with conductive gel or specialized patches. The captured electrical signals are amplified and filtered to remove noise, then digitized by acquisition devices, and can be further analyzed and processed by computer software. This technology has been successfully applied in the fields of exoskeleton robots and prosthetics.
4. Conclusion
This paper initially examined the current state of research on lower limb exoskeleton robots both domestically and internationally. Abroad, there is relatively mature technology and products in the field of lower limb exoskeleton robots, covering mechanical design, intelligent control, neural control, and other aspects. Some advanced technologies such as biomechanical simulation and human-machine interaction design are widely used, with technologies like Lokomat and Rewalk already being very mature. Compared to international advancements, this paper further explores key technologies of lower limb exoskeleton robots, including the degrees of freedom in human lower limb movement, human gait motion, robot structural design, and the drive methods and interaction control of robots. In terms of structural design, the future development focus will be on the comfort of patients' wear and personalized design direction; regarding the drive methods of robots, most robots on the market currently use electric motor drive, pneumatic drive, and hydraulic drive, while future lower limb exoskeleton robots will seek more energy-efficient and effective devices in the choice of drive methods. In the field of interaction control for lower limb exoskeleton robots, current research is mostly applied to bioelectrical signals, mainly surface electromyography signals. However, as research on the human brain becomes more comprehensive, the technology using sEMG will gradually be applied to the interaction control of lower limb exoskeleton robots. As the functions of robots continue to be perfected, their comprehensive performance continually improves, and the establishment of exoskeleton rehabilitation-related assessment systems, lower limb exoskeleton rehabilitation robots are expected to become indispensable rehabilitation equipment in the field of rehabilitation medicine in the future.
References
[1]. "Results of the Seventh National Population Census: China's Population Reaches 1.41178 Billion" (2021). Xinmin Weekly, (17), 35.
[2]. Wu, W. K., & Zhou, W. Q. (2021). Overview of Treatment for Lower Limb Motor Dysfunction after Stroke. China Medicine Guide, 20-24.
[3]. Zhang, X. H., Wang, X. M., & Liu, B. (2012). Early Comprehensive Rehabilitation Efficacy Analysis of Knee Joint Function Impairment after Internal Fixation Surgery for Lower Limb Fractures. Chinese Journal of Rehabilitation Medicine, 53-55+59.
[4]. Li, H. W., Zhang, T., & Feng, Y. J. (2017). Application Progress of Exoskeleton Lower Limb Rehabilitation Robots in Stroke Rehabilitation. Chinese Journal of Rehabilitation Theory and Practice, (07), 788-791.
[5]. Wang, Y. J., & Li, J. J. (2012). Application and Research Progress of Lower Limb Exoskeleton Robots in Reconstructing Walking Function of Patients with Incomplete Spinal Cord Injury. In International Rehabilitation Forum. Beijing, 184-188.
[6]. Wan, D. Q., Xu, Y. M., & Bai, Y. H. (2011). Research and Progress of Lower Limb Exoskeleton Rehabilitation Robots. Chinese Journal of Tissue Engineering Research and Clinical Rehabilitation, 15(52), 9855-9858.
[7]. L Lünenburger, Gery Colombo, Robert Riener, et al. Biofeedback in gait training with the robotic orthosis Lokomat[J]. Conference proceedings: Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society Conference, 2004, 7:4888-4891.
[8]. ESQUENAZI A,TALATY M,PACKEL A,et al .The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury [J]. American Journal of Physical Medicine & Rehabilitation,2012,91(11): 911- 921.
[9]. Nilsson A, Vreede K S, Häglund V, et al. Gait training early after stroke with a new exoskeleton - the hybrid assistive limb: a study of safety and feasibility[J]. Journal of Neuroengineering & Rehabilitation, 2014, 11(1):92.
[10]. Metrailler P, Blanchard V, Perrin I, et al. Improvement of Rehabilitation Possibilities with the MotionMaker [C]//The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics. Pisa, Italy: IEEE/RAS-EMBS, 2006: 359 – 364.
[11]. DÍAZ I, GIL J J, SÁNCHEZ E. Lower-limb robotic rehabilitation: literature review and challenges[J]. J Robot, 2011(2): 759-764.
[12]. Angold R, Zoss A B, Burns J W, et al. Hip and knee actuation systems for lower limb orthotic devices: U.S,Patent 9, 011, 354[P]. 2015-4-21.
[13]. Kazerooni H, Amundson K, Angold R, et al. Exoskeleton and method for controlling a swing leg of the exoskeleton: U.S,Patent 8,801,641[P]. 2014-8-12.
[14]. Milia P, de Salvo F, Caserio M, et al. Neurorehabilitation in paraplegic patients with an active powered exoskeleton (Ekso) [J]. Digital Medicine, 2016, 2(4): 163-168.
[15]. Jia, S. (2016). Dynamic Analysis and Motion Planning of Lower Limb Exoskeletons [Doctoral dissertation]. Southeast University, Nanjing, 12-35.
[16]. Zhang, C. (2016). Research on Lower Limb Powered Exoskeleton Robots [Doctoral dissertation]. Harbin Institute of Technology, Harbin.
[17]. Shuai M. A biped lower-limb exoskeleton rehabilitation robot: CN3048224985[P]. 2018-09-18.
[18]. Wang Z B, Chen S J, Yang Q, et al. Progress in clinical rehabilitation of lower extremity exoskeleton robot[J]. Chinese Journal of Rehabilitation Medicine, 2021, 36(6): 761-765.
Cite this article
Lu,Y. (2024). Progress and development trends of lower limb exoskeleton rehabilitation robots. Applied and Computational Engineering,93,68-75.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. "Results of the Seventh National Population Census: China's Population Reaches 1.41178 Billion" (2021). Xinmin Weekly, (17), 35.
[2]. Wu, W. K., & Zhou, W. Q. (2021). Overview of Treatment for Lower Limb Motor Dysfunction after Stroke. China Medicine Guide, 20-24.
[3]. Zhang, X. H., Wang, X. M., & Liu, B. (2012). Early Comprehensive Rehabilitation Efficacy Analysis of Knee Joint Function Impairment after Internal Fixation Surgery for Lower Limb Fractures. Chinese Journal of Rehabilitation Medicine, 53-55+59.
[4]. Li, H. W., Zhang, T., & Feng, Y. J. (2017). Application Progress of Exoskeleton Lower Limb Rehabilitation Robots in Stroke Rehabilitation. Chinese Journal of Rehabilitation Theory and Practice, (07), 788-791.
[5]. Wang, Y. J., & Li, J. J. (2012). Application and Research Progress of Lower Limb Exoskeleton Robots in Reconstructing Walking Function of Patients with Incomplete Spinal Cord Injury. In International Rehabilitation Forum. Beijing, 184-188.
[6]. Wan, D. Q., Xu, Y. M., & Bai, Y. H. (2011). Research and Progress of Lower Limb Exoskeleton Rehabilitation Robots. Chinese Journal of Tissue Engineering Research and Clinical Rehabilitation, 15(52), 9855-9858.
[7]. L Lünenburger, Gery Colombo, Robert Riener, et al. Biofeedback in gait training with the robotic orthosis Lokomat[J]. Conference proceedings: Annual International Conference of the IEEE Engineering in Medicine and Biology Society. IEEE Engineering in Medicine and Biology Society Conference, 2004, 7:4888-4891.
[8]. ESQUENAZI A,TALATY M,PACKEL A,et al .The ReWalk powered exoskeleton to restore ambulatory function to individuals with thoracic-level motor-complete spinal cord injury [J]. American Journal of Physical Medicine & Rehabilitation,2012,91(11): 911- 921.
[9]. Nilsson A, Vreede K S, Häglund V, et al. Gait training early after stroke with a new exoskeleton - the hybrid assistive limb: a study of safety and feasibility[J]. Journal of Neuroengineering & Rehabilitation, 2014, 11(1):92.
[10]. Metrailler P, Blanchard V, Perrin I, et al. Improvement of Rehabilitation Possibilities with the MotionMaker [C]//The First IEEE/RAS-EMBS International Conference on Biomedical Robotics and Biomechatronics. Pisa, Italy: IEEE/RAS-EMBS, 2006: 359 – 364.
[11]. DÍAZ I, GIL J J, SÁNCHEZ E. Lower-limb robotic rehabilitation: literature review and challenges[J]. J Robot, 2011(2): 759-764.
[12]. Angold R, Zoss A B, Burns J W, et al. Hip and knee actuation systems for lower limb orthotic devices: U.S,Patent 9, 011, 354[P]. 2015-4-21.
[13]. Kazerooni H, Amundson K, Angold R, et al. Exoskeleton and method for controlling a swing leg of the exoskeleton: U.S,Patent 8,801,641[P]. 2014-8-12.
[14]. Milia P, de Salvo F, Caserio M, et al. Neurorehabilitation in paraplegic patients with an active powered exoskeleton (Ekso) [J]. Digital Medicine, 2016, 2(4): 163-168.
[15]. Jia, S. (2016). Dynamic Analysis and Motion Planning of Lower Limb Exoskeletons [Doctoral dissertation]. Southeast University, Nanjing, 12-35.
[16]. Zhang, C. (2016). Research on Lower Limb Powered Exoskeleton Robots [Doctoral dissertation]. Harbin Institute of Technology, Harbin.
[17]. Shuai M. A biped lower-limb exoskeleton rehabilitation robot: CN3048224985[P]. 2018-09-18.
[18]. Wang Z B, Chen S J, Yang Q, et al. Progress in clinical rehabilitation of lower extremity exoskeleton robot[J]. Chinese Journal of Rehabilitation Medicine, 2021, 36(6): 761-765.