






1. Introduction
Tracing back to the early 20th century, the concept of autonomous vehicles came out with the first recorded experiment in 1925 by Houdina Radio Control [1]. However, it was not until the late 20th century that significant advancements in AI and sensor technology paved the way for modern autonomous driving research. The DARPA Grand Challenge in 2004 marked a turning point, sparking a global race to develop self-driving cars. Since then, the field has seen exponential growth, with major automotive and tech companies costing a huge amount of investment in researching and developing [2, 3]. The development of AI really helps to promote the development of autonomous driving technology. For example, Tesla in the United States already has a relatively mature highway autopilot function, while China's Ideal already has the function of self-parking. Deep learning in particular has led to significant improvements in the perception and decision-making capabilities of self-driving cars. Convolutional neural networks (CNNs) have been used for object detection and recognition, while recurrent neural networks can be utilized for sequence prediction in driving scenarios [4]. The integration of these AI techniques has led to more sophisticated autonomous driving systems capable of navigating safely and efficiently in complex environments. In addition, the explosion of distributed learning has carried out new possibilities for AI model training in autonomous driving. For example, locally updated SGD algorithms allow for decentralized training of models, which is particularly beneficial when data privacy and computational efficiency are critical [5]. This approach fits well with the distributed nature of automated driving data, which is often generated by multiple cars and sensors in different locations.
The motivation of this research stems from the need to improve the efficiency, scalability, and privacy of AI models especially distributed ML in autonomous driving systems. As for the framework of this paper, the basic descriptions will be given in Sec. 2. Different machine learning models will be detailed in the next sections. presents the results of applying AI techniques to autonomous driving and the evaluation of the results The fifth section describes the limitations of the research applied so far and the outlook for the future, and finally concludes with an overview.
2. Descriptions of autonomous driving
Self-driving cars are automobiles which are capable of operating without human intervention. They are the pinnacle of modern automotive technology, a culmination of scientific advances and artificial intelligence algorithms. The key technologies and algorithms underpinning self-driving cars are described in detail:
• Sensor technologies: Self-driving cars basically armed with a range of sensors including laser radar (LiDAR), radar, sonar and cameras. Providing a 360-degree view of the vehicle's surroundings, these sensors is critical for detecting and avoiding objects. LiDAR with lasers in particular, are able to measure distances and generate high-resolution graphs of the environment.
• Artificial Intelligence and Machine Learning: Artificial Intelligence algorithms plays the core role of self-driving cars, enabling them to sense, reason and make decisions. Machine learning is used to improve the car's ability to recognize patterns, such as distinguishing between different types of vehicles, pedestrians and obstacles on the road.49 3. Computer vision.
• Computer vision: This technology enables self-driving cars to interpret and understand the visual world. It involves processing images and video to recognize road signs, traffic signals and other important elements of the driving environment
• Simulation: Before hitting the roads, self-driving cars undergo rigorous testing in simulated environments. These simulations help developers to make identification and correct problems in a controlled setting in order to make sure the security and reliability of the vehicle’s AI systems
• High-Precision Mapping: Self-driving cars rely on detailed maps for navigation. These maps are created using a combination of satellite data, LiDAR, and other sensors. They provide information about the road layout, traffic signs, and other static elements that are crucial for safe navigation.
Self-driving cars have already been put into a variety of applications, for instance urban transportation, long-distance transportation, shared mobility services, and special environment operations. In urban transportation, self-driving cars can improve traffic efficiency by optimizing routes and reducing congestion [6]. In long-distance transportation, self-driving trucks can transport goods more safely and economically on highways. Shared mobility services, such as self-driving cabs (robo-taxis), can provide on-demand mobility, reduce the demand for private vehicles, and alleviate the pressure on parking in urban areas [7]. Additionally, self-driving cars can be used in special environments, such as ports and harbors, and in special environments. driving vehicles can improve operational efficiency and reduce labor costs in special environments such as ports and mining operations
The demand for AI in this field is mainly in the areas of decision making, machine learning, and natural language processing, etc. AI algorithms must have the ability to process an amount of sensor data, recognize the surrounding environment and road signs, and carry out accurate road planning and driving situation recognition. At the same time, the self-driving system needs to be able to make fast and accurate decisions based on real-time data, containing path designing, obstacle avoidance, and speed controlling. planning, obstacle avoidance, and speed control [8]. ML technology enables self-driving cars to continuously learn from data and optimize performance. Natural language processing technology enables vehicles to understand natural language commands and provide a more natural interaction experience.
3. AI Modeling
In autonomous driving, AI plays a pivotal role, particularly during binary classification problems where the AI model must distinguish between two distinct classes. For instance, AI models are trained to classify objects as either static or dynamic, or to differentiate between various types of vehicles and pedestrians. The application of distributed machine learning in this context is crucial due to the vast amount of data generated by autonomous vehicles, which necessitates efficient and scalable training methods. Thus, the distributed machine learning might perform well in the predicting of these binary classification problem
Distributed machine learning, especially with Local-Update SGD, allows for the training of AI models across multiple nodes, which can significantly speed up the learning process and enhance the models' ability to handle large-scale data1.Here is a brief introduction of local-update SGD. Local update SGD is not a very new approach. However, it has been observed that local SGD achieves the design goal of reducing communication overheads while delivering unparalleled test accuracy over the corresponding SGD baseline [9]. This is particularly beneficial in the context of autonomous driving, where real-time data from various sensors needs to be processed and classified with high accuracy. And local-update SGD benefits a lot while dealing with a large amount of data. Distributed modelling allows cars system to easily adapt to near future data growth and changes which can help the decision making of self-driving in the comprehensive situations where data changes in a fast and variable way. The local update SGD algorithm is an algorithm that periodically synchronizes the local model based on the local iteration of the SGD of the working execution node, which brings the benefit of K to effectively reduce the frequency of communication and save communication latency [10]. By reducing the communication between nodes, which involves a model that averages local updates at regular intervals,the improvement in communication efficiency can be achieved. What more significant is that it provides data privacy and security.
Despite these binary classification problems, the integration of AI in autonomous driving through distributed learning can be seen in various applications. For example, AI models can be trained to predict potential obstacles on the road, classify traffic signs, or even anticipate the behavior of other vehicles and pedestrians. These binary classification tasks are essential for ensuring the safe and efficient operation of autonomous vehicles. The success of AI in these applications is often assessed through metrics. These metrics, such as accuracy, can make it better to evaluate the performance of the AI model in distinguishing between the two classes in binary classification problems. Additionally, the robustness of the AI model is tested through rigorous simulations and real-world testing to ensure its reliability in various driving scenarios. Despite the advancements, there are challenges in implementing AI models in autonomous driving, such as ensuring the models' flexibility to different environments and conditions, and addressing the computational complexity of training large-scale models. Future research directions may focus on enhancing the accuracy of AI models, improving data efficiency, and developing more robust algorithms for distributed learning. The application of AI in self- driving, particularly through distributed machine learning, holds huge promise for improving the security and efficiency of self-driving cars. Considering that the technology keeps to evolve, one can imagine and expect more and more breakthroughs that will propel the field of autonomous driving towards greater sophistication and wider adoption.
4. AI implementations in self-driving
Fig. 1 is a basic graph of the automation levels. Artificial intelligence technologies have made huge advancements in the realm of self- driving, with deep learning taking the lead in enhancing the perception and decision-making capabilities of self-driving cars [11]. CNNs are utilized in a wide range for missions like detecting and recognizing object, while RNNs are employed for result prediction, which is crucial for navigating dynamic driving scenarios [12].
The integration of these AI technologies has resulted in more sophisticated autonomous driving systems capable of safely and efficiently navigating through complex environments. CNNs, with their capability to study and extract characteristics from raw image data, have vastly improved the accuracy of object detection, enabling self-driving vehicles to recognize and respond to various road users and obstacles in real-time. Meanwhile, RNNs, have proven valuable in predicting future states and trajectories of moving objects, facilitating better decision-making and path planning in dynamic situations. Furthermore, the combination of these deep learning models with other AI techniques, such as reinforcement learning for behavior planning and optimization algorithms for path planning, has enabled self-driving vehicles to adapt to changing road conditions, making informed decisions in real-time. This holistic approach to autonomous driving not only enhances safety but also increases the overall efficiency and comfort of the driving experience.
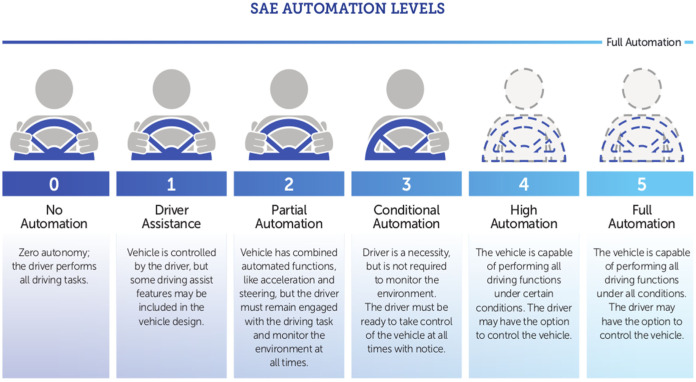
Figure 1. Automation levels [11].
5. Limitations and prospects
There is no denying that limitations exist for AI implementation in autonomous driving. For instance, the maturity of the technology still needs to be improved, especially the perception and the ability to make decision in the variable and comprehensive traffic situations. These are factors that are highly related to the security which need to be continuously optimized and verified. Secondly, reliability of the automatic driving system is the core issue, and any technical failure or wrong judgement may bring serious safety hazards. Moreover, legal and ethical issues are also obstacles to the popularization of autonomous driving technology, such as the division of responsibility and privacy protection, which need to be resolved through the joint efforts of the government, enterprises and all sectors of society. Otherwise, it will lead to a complex and awkward dilemma while autonomous vehicles getting into a liability disputes for traffic accidents. Lastly, high research, development and maintenance costs limit the speed of popularization of self-driving cars, making it difficult for this technology to rapidly enter ordinary households. Therefore, despite the huge potential of AI application in autonomous driving, these limitations still need to be overcome in order to promote the healthy development of autonomous driving technology.
Although AI has been faced certain limitations so far in the field of automatic driving, its applications are still broad and contain great development potential. In terms of technology maturity, the perception and decision-making ability in complex traffic situations can be improved with the continuous progress of deep learning, computer hardware vision and other technology, enabling to the automatic driving system to more accurately identify road conditions and obstacles and improve the security and efficiency of driving as well. As for of law and ethics, with the gradual improvement of relevant regulations and the establishment of ethical standards, issues such as the division of responsibility and privacy protection will be properly resolved, providing a strong guarantee for the popularization of autonomous driving technology. With the continuous maturity of technology and the expansion of market scale, the high research, development and maintenance costs will be gradually reduced, making self-driving cars more accessible and accelerating the pace of their entry into ordinary families. Therefore, the application of artificial intelligence in the field of automatic driving has a broad prospect, and is expected to bring revolutionary changes to the future of transport travel.
6. Conclusion
To sum up, this research provides a comprehensive analysis of the cutting-edge AI technologies implemented in autonomous driving technology, tracing their evolution from early concepts to their modern, highly developed state. Deep learning, in particular the recurrent neural networks, has greatly enhanced the perception and decision-making capabilities of self-driving vehicles, enabling them to traverse complex environments with astonishing accuracy and efficiency. The emergence of distributed machine learning, and in particular its focus on locally updated SGD, has further optimized the training of large-scale AI models, addressing challenges related to scalability, data privacy and communication efficiency. Despite these advances, limitations such as technological maturity, reliability issues, legal and ethical concerns, and high costs remain challenges that need to be overcome before autonomous driving technologies can be widely adopted. However, this study is optimistic about future prospects, highlighting the potential for continuous improvement in perception and decision-making capabilities, the possibility of addressing legal and ethical issues through regulatory frameworks and ethical standards, and the prospect of cost reductions as the technology matures and the market scales up. In conclusion, the application of AI in automated driving is promising, and with continued research and development, the future of transport is poised for a revolutionary change.
References
[1]. Thrun S, Montemerlo M, Dahlkamp H, et al 2006 Stanley: The robot car that won the DARPA grand challenge Journal of Field Robotics vol 23(9) pp 661-692
[2]. Urmson C, Anhalt J, Darms M, Ice M and Peterson K 2008 Autonomous driving in urban environments: Boss and the urban challenge In Intelligent Vehicles Symposium pp 1-6.
[3]. Kalra N and Van Parys T 2016 A Bayesian Approach to Autonomous Vehicle Testing American Statistician vol 70(3) pp 237-248
[4]. Bojarski M, Del Testa D, Dworakowski D, Firner B, Flepp B, Goyal P and Zhang J 2016 End to end learning for self-driving cars arXiv preprint arXiv:1604 07316
[5]. Chen L C, Zhu Y, Papandreou G, Schroff F and Adam H 2018 Encoder-decoder with atrous separable convolution for semantic image segmentation Proceedings of the European Conference on Computer Vision (ECCV) pp 801-818
[6]. Saust F, Wille J M, Lichte B and Maurer M 2011 June Autonomous vehicle guidance on braunschweig's inner ring road within the stadtpilot project 2011 IEEE Intelligent Vehicles Symposium (IV) pp 169-174
[7]. Benmimoun M 2017 Effective evaluation of automated driving systems SAE Technical Paper vol 1 p 131
[8]. Menzel T, Bagschik G and Maurer M 2018 June Scenarios for development test and validation of automated vehicles 2018 IEEE Intelligent Vehicles Symposium (IV) pp 1821-1827
[9]. Bahel V, Pillai S and Malhotra M 2020 A Comparative Study on Various Binary Classification Algorithms and their Improved Variant for Optimal Performance IEEE Region 10 Symposium (TENSYMP) pp 5-7
[10]. Scholz M and Wimmer T 2021 A comparison of classification methods across different data complexity scenarios and datasets
[11]. Srivastav A and Mandal S 2023 Radars for autonomous driving: A review of deep learning methods and challenges IEEE Access p 11
[12]. Shreyas V, Bharadwaj S N, Srinidhi S, Ankith K U and Rajendra A B 2020 Self-driving cars: An overview of various autonomous driving systems Advances in Data and Information Sciences: Proceedings of ICDIS vol 2019 pp 361-371
Cite this article
Xu,J. (2024). Analysis of the Implementation for the State-of-art AI Techniques in Self-driving. Applied and Computational Engineering,106,68-73.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Thrun S, Montemerlo M, Dahlkamp H, et al 2006 Stanley: The robot car that won the DARPA grand challenge Journal of Field Robotics vol 23(9) pp 661-692
[2]. Urmson C, Anhalt J, Darms M, Ice M and Peterson K 2008 Autonomous driving in urban environments: Boss and the urban challenge In Intelligent Vehicles Symposium pp 1-6.
[3]. Kalra N and Van Parys T 2016 A Bayesian Approach to Autonomous Vehicle Testing American Statistician vol 70(3) pp 237-248
[4]. Bojarski M, Del Testa D, Dworakowski D, Firner B, Flepp B, Goyal P and Zhang J 2016 End to end learning for self-driving cars arXiv preprint arXiv:1604 07316
[5]. Chen L C, Zhu Y, Papandreou G, Schroff F and Adam H 2018 Encoder-decoder with atrous separable convolution for semantic image segmentation Proceedings of the European Conference on Computer Vision (ECCV) pp 801-818
[6]. Saust F, Wille J M, Lichte B and Maurer M 2011 June Autonomous vehicle guidance on braunschweig's inner ring road within the stadtpilot project 2011 IEEE Intelligent Vehicles Symposium (IV) pp 169-174
[7]. Benmimoun M 2017 Effective evaluation of automated driving systems SAE Technical Paper vol 1 p 131
[8]. Menzel T, Bagschik G and Maurer M 2018 June Scenarios for development test and validation of automated vehicles 2018 IEEE Intelligent Vehicles Symposium (IV) pp 1821-1827
[9]. Bahel V, Pillai S and Malhotra M 2020 A Comparative Study on Various Binary Classification Algorithms and their Improved Variant for Optimal Performance IEEE Region 10 Symposium (TENSYMP) pp 5-7
[10]. Scholz M and Wimmer T 2021 A comparison of classification methods across different data complexity scenarios and datasets
[11]. Srivastav A and Mandal S 2023 Radars for autonomous driving: A review of deep learning methods and challenges IEEE Access p 11
[12]. Shreyas V, Bharadwaj S N, Srinidhi S, Ankith K U and Rajendra A B 2020 Self-driving cars: An overview of various autonomous driving systems Advances in Data and Information Sciences: Proceedings of ICDIS vol 2019 pp 361-371