







1. Introduction
Obstacle avoidance testing and automated pathfinding are currently popular topics in the field of robotics, with numerous papers emerging in recent years that introduce various new algorithms. For instance, there are fusion algorithms like RRT-Connect and DWA algorithms, as well as the IFGM-IDWA fusion algorithm. These papers represent significant breakthroughs in the field of robotics and hold considerable practical significance and value [1-3]. This paper focuses on the study of obstacle avoidance systems, including risk-aware obstacle avoidance systems and improved genetic algorithm-based systems. However, since other articles primarily discuss one aspect or the other, their coverage and practical application scenarios are limited. Additionally, real-world systems rarely operate in a single plane, constraining the range of considerations. Therefore, in practical systems, both elements should coexist and support each other. For example, in earthquake rescue robots, this emerging research area integrates multiple projects, including pathfinding, obstacle avoidance, and robotic arms, necessitating the design of the most suitable route while considering obstacle avoidance. Automated pathfinding, obstacle avoidance systems, and the operation of robotic arms are all critical indicators for earthquake rescue robots. However, due to the independent operation of robotic arms and their involvement in mechanical aspects, this paper will not discuss them for now. If a robot can first utilize an obstacle avoidance system to detect relevant obstacles and analyze handling solutions for each, then navigate to the destination using a pathfinding system, it would significantly increase the directions and locations accessible to earthquake rescue robots, enhancing the chances of rescuing trapped individuals. Thus, this paper aims to provide insights and prospects for future research directions concerning earthquake rescue robots based on a literature review, offering a reference for subsequent scholars.
2. Dynamic Path Planning for Autonomous Vehicles Based on Ant Colony and Dynamic Window Method
This paper primarily discusses an improved ant colony algorithm that utilizes the position information of the starting and ending points to create an uneven initial pheromone distribution, thereby reducing time consumption in the early stages of the search [4]. By maintaining the global optimal path and increasing the pheromone concentration of high-quality local paths, the pheromone update mechanism is optimized to enhance path exploration efficiency. Furthermore, the generated path is further optimized to reduce redundancy at nodes and turning points, thus shortening the path length. Simulation results indicate that compared to traditional path planning algorithms, the integrated algorithm performs better in terms of distance, smoothness, and convergence, meeting the safety operational requirements for autonomous vehicles. The research is based on the grid model shown in Figure 1, where the black areas represent obstacles and the white areas represent the road. The road employs an 8-neighborhood search method, with each grid serving as the center position of a search point.
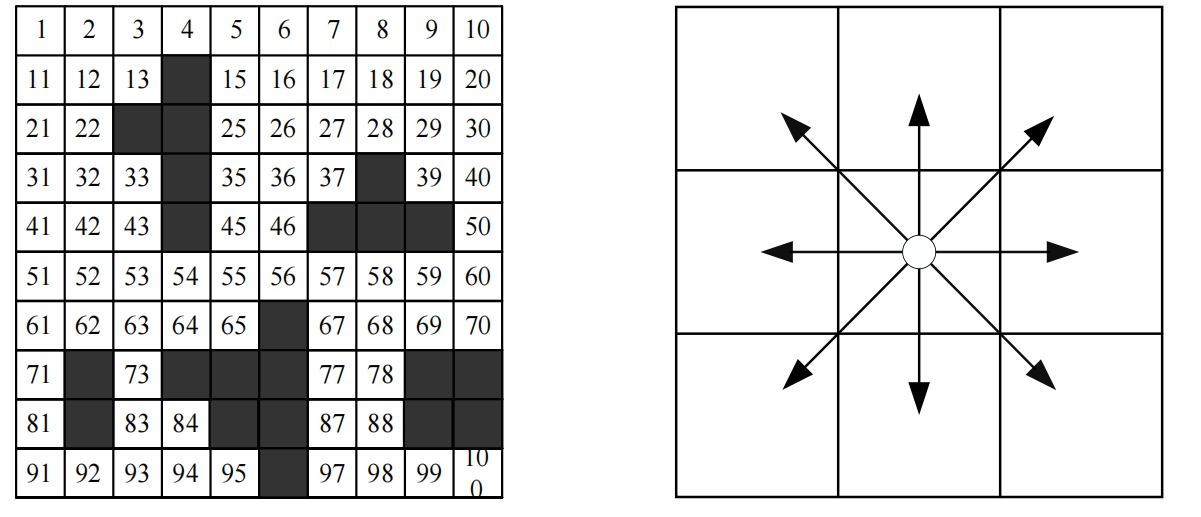
Figure 1. Grid Model [4]
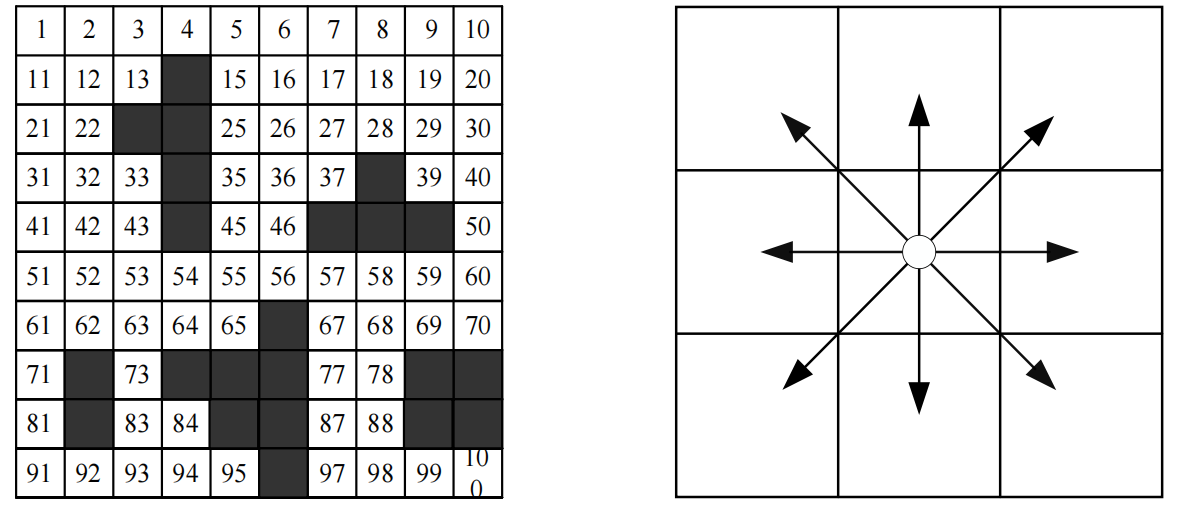
Figure 2. Eight Directions of an Ant Colony [4]
Due to the initial phase of the traditional ant colony algorithm, ants often wander aimlessly without proper guidance, significantly slowing down convergence. To address this issue, the paper proposes a novel approach using non-uniform pheromone distribution. This method increases the pheromone concentration along the line connecting the starting and ending points, with the concentration decreasing as the distance increases. The exact formula is: \( τξμτ=+c \) . Furthermore, to highlight the advantages of optimal paths and enhance the algorithm's convergence speed, a dynamic increment model for pheromone concentration is constructed based on the difference between the worst and current paths. The expression for this dynamic increment model is as follows:.
\( \begin{matrix}Δτ_{ij}^{m}(t)=\frac{{Q^{*}}}{{L_{n,m}}}, \\ {Q^{*}}=\begin{cases}\begin{matrix}{L_{n,max}}-{L_{n,m}}, & {Q^{*}}≤{Q_{max }}; \\ {Q_{max }}, & {Q^{*}} \gt {Q_{max }} \\ \end{matrix}\end{cases} \\ \end{matrix}\ \ \ (1) \)
A secondary optimization method is introduced, which assesses the spatial relationships between the current node, intermediate nodes, and obstacles to determine whether neighboring nodes can be discarded. If the positional relationship is horizontal or vertical, or if the distance between the line connecting nodes and the obstacle is less than the obstacle's effective range, the adjacent nodes are discarded. When nodes cannot be discarded, the next node is selected as the current node, and this process is repeated. The paper describes the integration of these methods, ultimately resulting in a simulation model that shows significant improvements over traditional ant colony models. In various environments, the enhanced ant colony algorithm demonstrates better optimization in terms of path length and iteration count, effectively reducing path length and accelerating the search speed. Moreover, due to the algorithm's capability for real-time computation, it can be applied to address many practical problems.
3. Research on Automatic Inspection Path Planning for Substations Based on Improved A* Algorithm
This paper enhances the traditional A* path planning algorithm by introducing grid control factors to overcome the limitations of inflexible grid division, thereby making the planning process more efficient. By adjusting the grid size, the generated planned paths are smoothed, improving obstacle avoidance capabilities and planning efficiency. Additionally, a planning loop mechanism is incorporated to address the limitation of the traditional A* algorithm, which can only perform single-target path planning, enabling the achievement of multiple target points. The improved A* algorithm was experimentally applied in a simulated substation area, and its performance in automatic equipment inspection path planning was analyzed through simulation. Results indicate that the new algorithm not only shortens and optimizes the planned path, reducing the number of turns, but also allows for the simultaneous planning of multiple targets.
In addressing various issues related to power equipment maintenance at power stations, such as low efficiency and incomplete working hours, the author introduces the concept of power inspection, which involves ensuring equipment operation and monitoring instrumentation and environmental information. Based on the A* algorithm, an improved A* algorithm for power inspection is proposed [5].
The author initially presents several optimization algorithms, including Ant Colony, Grey Wolf, and A* algorithms. Building upon these algorithms, the author then introduces and explains their improved A* algorithm. The first enhancement addresses the low efficiency of pathfinding by introducing grid control factor \( λ \) , allowing the grid size to be variable rather than fixed. The introduced calculation is as follows [5]:
\( Gs=λb+o\ \ \ (2) \)
where GS is the current grid size; o represents the initial grid size of the traditional A* algorithm; and b denotes the grid attribute parameter, which is set to vary depending on different scenarios. Additionally, the author incorporates a planning loop mechanism suitable for the computation and planning of multiple target points.
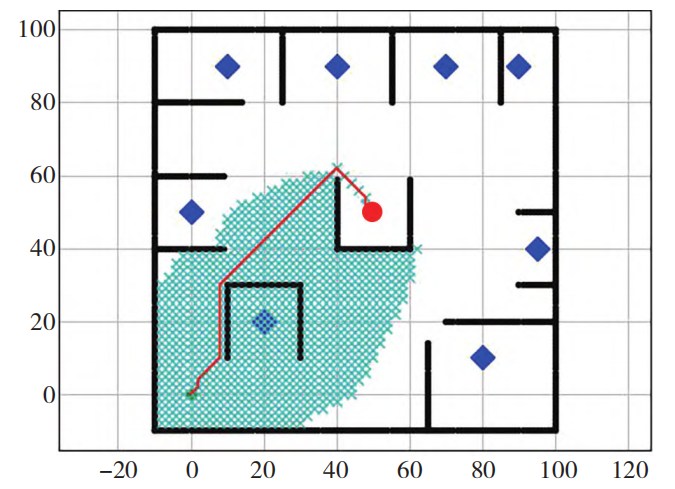
Figure 3. Simulated Path Diagram of the Improved A* Algorithm [5]
Figure 3 illustrates the simulated path diagram generated by the improved A* algorithm. Compared to previous versions, the computation speed has increased by 87%. Additionally, the algorithm effectively achieves goals in continuous planning with multiple targets. The author highlights two key contributions to path planning: first, it enables more efficient path planning in large areas with obstacles; second, the improved A* algorithm effectively facilitates the sequential search and path planning for multiple targets.
4. Mobile Robot Path Planning Based on Improved RRT-Connect and DWA
The article first introduces the RRT-Connect algorithm in global path planning. Compared to the basic RRT algorithm, it introduces a second random tree, alternately expanding from both the starting point and the target point as root nodes. The author then presents their improved RRT-Connect algorithm. First, due to the RRT-Connect algorithm generating many nodes that do not participate in actual path planning in complex environments, dividing the search area (e.g., into six segments) can enhance focus on key regions while ensuring a relatively complete algorithm [6]. Additionally, the author employs a target-oriented adaptive step length strategy to guide the nodes, with the traditional expansion expression as follows:
\( {q_{new }}={q_{nearest }}+S\frac{{q_{rand }}-{q_{nearest }}}{|{q_{rand }}-{q_{nearest }}|}\ \ \ (3) \)
The article improves the expression regarding s, presented as:
\( {S^{*}}=G(x)S=μ{e^{φx}}S\ \ \ (4) \)
Finally, the article presents methods for path pruning and smoothing. To address the issue of path irregularity, a greedy strategy is used to prune redundant nodes. The specific steps involve first connecting the starting point directly to the target point; if this connection does not collide with obstacles, it is accepted as the path. If a collision occurs, the node before the endpoint is connected to the starting point, and collision detection is performed sequentially for each node until a non-colliding node is found, marking it as a new path node. This new node then becomes the new starting point, and the process repeats until a direct, non-colliding connection to the target point is established. For local path planning, the author employs the Dynamic Window Approach (DWA), a common algorithm based on velocity sampling. This algorithm samples the robot's speed and predicts possible motion trajectories based on its current position, selecting the optimal trajectory for execution. After integrating all proposed algorithms, the author conducted simulation experiments, demonstrating that the improved RRT-Connect algorithm offers significant advantages in both path quality and search efficiency compared to the previous two algorithms, particularly in complex and narrow environments. Additionally, in dynamic experiments, the proposed integrated algorithm shows significant improvements in planning efficiency and path quality while consistently ensuring path safety, fully meeting the path planning needs of mobile robots in complex environments.
5. Discussion
This paper analyzes the algorithmic approaches proposed in three articles in detail. The first article establishes numerous small and large obstacles, incorporating the background into earthquake disaster relief. Given that earthquake sites are uneven and scattered with debris, the approaches from this paper can be effectively applied to pathfinding in earthquake rescue scenarios.
The second article discusses effective path planning in large, obstacle-filled environments. It emphasizes the ability to coordinate multiple goals efficiently, which is crucial for earthquake rescue robots that have various tasks and need to assist refugees in different locations.
The third article focuses on dynamic planning and deployment. Earthquake environments change rapidly; what may be flat one moment can collapse the next. Therefore, dynamic planning capabilities are vital for robots. This adaptability allows robots to respond flexibly to changing scenarios rather than following a rigid task list.
Additionally, the first article’s simulation experiments are comprehensive, covering static, dynamic, and hybrid algorithms, allowing us to appreciate the advantages of the dynamic window approach used in swarm intelligence. The theoretical improvements to the A* algorithm presented are well-founded, although the data applied in the simulations is somewhat limited and lacks robustness. The third article also considers both static and dynamic aspects, but its dynamic environment lacks complexity and disorder, which diminishes its practical relevance, indicating a need for deeper research.
6. Conclusion
This paper provides a comprehensive overview and summary of three pieces of literature, distilling their main contents. Ultimately, these insights are integrated into the previously proposed earthquake disaster relief robot, utilizing three different algorithms flexibly in various scenarios. The aim is to address practical challenges, significantly enhancing the robot's capabilities in path planning, obstacle avoidance, and overall coordination. This, in turn, greatly increases the robot's flexibility and intelligence, contributing positively to the field and offering promising prospects.
However, due to the lack of empirical data in this study, the aforementioned ideas have not yet been put into practice. The author plans to conduct further research on relevant programs and perform simulation experiments to provide assistance in this area. Additionally, upon reviewing recent literature on data mining, the author discovered that some studies employ newer data mining techniques, such as the CVRP algorithm, which effectively complements optimization problems related to the traveling salesman and vehicle routing.
Thus, this paper infers that the future development direction in this field will involve the integration of multiple algorithms within the realm of big data to address problems that single algorithms cannot solve, and to implement these solutions in practical applications.
References
[1]. Luo, Y., & Deng, J. (2024). Path planning for mobile robots based on improved RRT-Connect and DWA fusion. Journal of System Simulation, 1-12. https://doi.org/10.16182/j.issn1004731x.joss.24-0487.
[2]. Xiong, D. M., Ning, Y. Q., Wang, J. W., et al. (2024). Local path planning for mobile robots based on improved DWA. Industrial Control Computer, 37(08), 102-104.
[3]. Du, Q., Du, F., Wang, D., Ji, P. H., Cheng, J. F., & Qi, L. (2024). Path planning for intelligent vehicles based on IFGM-IDWA fusion algorithm. Journal of Tianjin Vocational Technical Normal University, 25-31. doi:10.19573/j.issn2095-0926.202402004.
[4]. Zheng, Y., Xi, K., Ba, W. T., Xiao, Y. J., & Yu, W. (2024). Dynamic path planning for autonomous vehicles based on ant colony and dynamic window method. Journal of Nanjing University of Information Science and Technology, 1-11. doi:10.13878/j.cnki.jnuist.20240506001.
[5]. Zhao, C. J., Zhu, Y. T., Hu, Y. Y., Yan, X. Y., & Zhan, R. F. (2024). Research on automatic inspection path planning for substations based on improved A* algorithm. Mechanical Design, (S1), 153-158. doi:10.13841/j.cnki.jxsj.2024.s1.032.
[6]. Maia, M. R. D. H., Plastino, A., & Uéverton dos Santos Souza. An improved hybrid genetic search with data mining for the CVRP. Networks, 83, 692.
Cite this article
Bao,Y. (2024). Proposed Outlook based on Different Obstacle Avoidance and Pathfinding Algorithms. Applied and Computational Engineering,97,83-88.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Luo, Y., & Deng, J. (2024). Path planning for mobile robots based on improved RRT-Connect and DWA fusion. Journal of System Simulation, 1-12. https://doi.org/10.16182/j.issn1004731x.joss.24-0487.
[2]. Xiong, D. M., Ning, Y. Q., Wang, J. W., et al. (2024). Local path planning for mobile robots based on improved DWA. Industrial Control Computer, 37(08), 102-104.
[3]. Du, Q., Du, F., Wang, D., Ji, P. H., Cheng, J. F., & Qi, L. (2024). Path planning for intelligent vehicles based on IFGM-IDWA fusion algorithm. Journal of Tianjin Vocational Technical Normal University, 25-31. doi:10.19573/j.issn2095-0926.202402004.
[4]. Zheng, Y., Xi, K., Ba, W. T., Xiao, Y. J., & Yu, W. (2024). Dynamic path planning for autonomous vehicles based on ant colony and dynamic window method. Journal of Nanjing University of Information Science and Technology, 1-11. doi:10.13878/j.cnki.jnuist.20240506001.
[5]. Zhao, C. J., Zhu, Y. T., Hu, Y. Y., Yan, X. Y., & Zhan, R. F. (2024). Research on automatic inspection path planning for substations based on improved A* algorithm. Mechanical Design, (S1), 153-158. doi:10.13841/j.cnki.jxsj.2024.s1.032.
[6]. Maia, M. R. D. H., Plastino, A., & Uéverton dos Santos Souza. An improved hybrid genetic search with data mining for the CVRP. Networks, 83, 692.