






1. Introduction
As technology develops, more and more diseases no longer pose a fatal threat to humans. After humans have survived, they always want to become better and have no residual effects of the disease, and then the rehabilitation has been made. In the early times, rehabilitation is the priority of the rich or powerful people like nobles. However, with the trend of high quality of life per capita, rehabilitation behavior has become common and, most of the time, necessary after an illness. Traditionally, rehabilitation is done by nurses, and it always requires high pay, nurses need professional knowledge and sometimes enough experience to do the rehabilitation. After robots become possible, people are going to think, researchers began to explore the possibility of using robotic devices to assist human movement, similar to the concept portrayed in popular culture. The research on exoskeletons began in the early 1960s, the U.S. Department of Defense became interested in developing the concept of a powered suit of armor, whereas, at Cornell Aeronautical Laboratories, the concept of man-amplifiers as manipulators to enhance the strength of a human operator was proposed [1]. However, based on the restriction of material and some crucial skills like brain perception, until now, people cannot make an exoskeleton that can achieve the functions in the movie. Given these limitations, rehabilitation emerged as an ideal application field for exoskeleton technology. Currently, exoskeleton robot research primarily focuses on medical applications, particularly in mobility support and rehabilitation for patients with stroke and spinal cord injuries (SCI) [2].
On rehabilitation, the exoskeleton can do activities on preset professional modes and hard to make mistakes. Also, the initial investment in exoskeleton technology may be substantial, but in the long run, using exoskeletons will save more money than hiring expensive manpower. Given these advantages in terms of consistency, reliability, and long-term cost-effectiveness, research on rehabilitation exoskeletons has become increasingly imperative. This overview will mainly discuss different types of lower limb autonomous exoskeletons for rehabilitation, focusing on innovations in various parts of the exoskeletons and an algorithm proposed by a research center that developed a successfully commercialized exoskeleton. This paper will discuss one algorithm that helps save time and cost on hip exoskeletons, the innovative idea of adding springs in the series elastic actuator for knee exoskeletons, and one ankle exoskeleton that is based on reconfigurable kinematics and Bowden-cable-driven series elastic actuation. In the end, this paper will introduce the HAL exoskeleton, which has already been successfully realized and matured in commercialization.
2. Annotations on lower-limb exoskeleton
In 2005, the University of California, Berkeley, published an article that concluded the content of the first functional load-carrying and energetically autonomous exoskeleton. They called this project the Berkely Lower Extremity Exoskeleton (BLEEX) Project. In this project, researchers from Berkely divided the research of exoskeleton technology with human power argumentation into the lower extremity exoskeleton and the upper extremity exoskeleton, and their work was focused on the lower extremity exoskeleton. In BLEEX, they made four main advances. First, they developed a new control architecture that uses the measurements of the exoskeleton to control the exoskeleton itself. This approach avoids the human-induced instability caused by sensing human force. Second, BLEEX used a series of high specific-power and specific-energy power supplies, which make BLEEX an achievable field-operational system. Third, a body LAN (local area network) was developed based on simplifying and reducing the cabling task for the sensors and actuators needed for exoskeleton control. Lastly, a flexible and versatile mechanical architecture was chosen to decrease complexity and power consumption [3]. Based on these developments, BLEEX has successfully transferred part of the bearing weight to the ground, which means it does not use humans as its base.
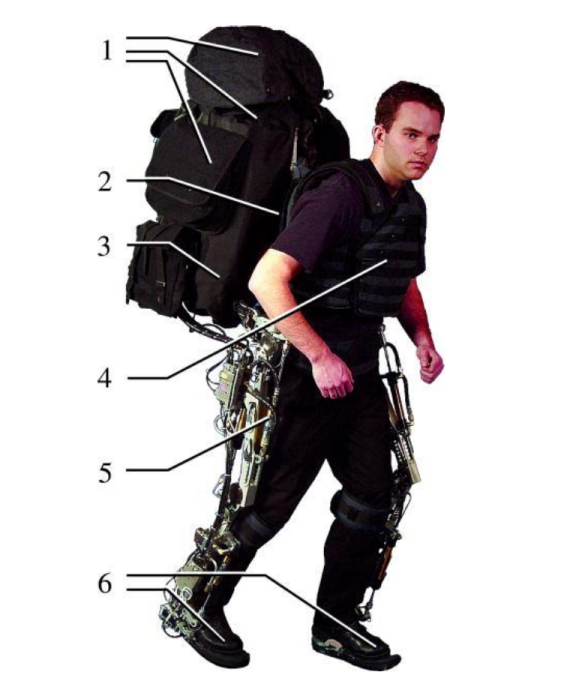
Figure 1: The final structure of the BLEEX [3]
The final structure of the BLEEX is shown in Figure 1, and based on the innovations mentioned above, BLEEX successfully walked, and it can cover its weight of itself and produce its own power. This is an invention that was of great significance for the lower extremity exoskeleton; it proved that the lower extremity exoskeleton can carry a payload with an autonomous energy system. There are two main development directions for lower limb exoskeletons: autonomous and assisted exoskeletons. Most autonomous extremity exoskeletons are mainly focused on medical rehabilitation, which helps patients with lower limb motor dysfunctions get familiar with walking again and try to restore walking function. On the other hand, assisted extremity exoskeletons are mainly focused on sports and military use. Before starting talking about the specific innovations, it's important to understand the general classification of lower-limb exoskeleton robots. Generally, they are classified as hip–knee–ankle motion, hip–knee motion, hip motion, or knee motion based on the various assistance functions [4].
2.1. Hip exoskeleton robots (HERs)
Human lower body motions mainly involve the rotation of the hip joints, knee joints, and ankle joints, and the research shows that the human hip joint provides 45% of mechanical power, which means the hip joint activities always play the most crucial role in walking [5]. In hip exoskeleton robots, the algorithm for motion is always hard to build and consumes lots of time with calculations based on the model. Also, the uncertainty from the user’s actions and exoskeleton needs more detectors, which will increase the cost. Based on all these disadvantages, Shi-Heng Hsu et al. developed a robotic hip exoskeleton for walking rehabilitation with two degrees of freedom as shown in Figure 2 [5].
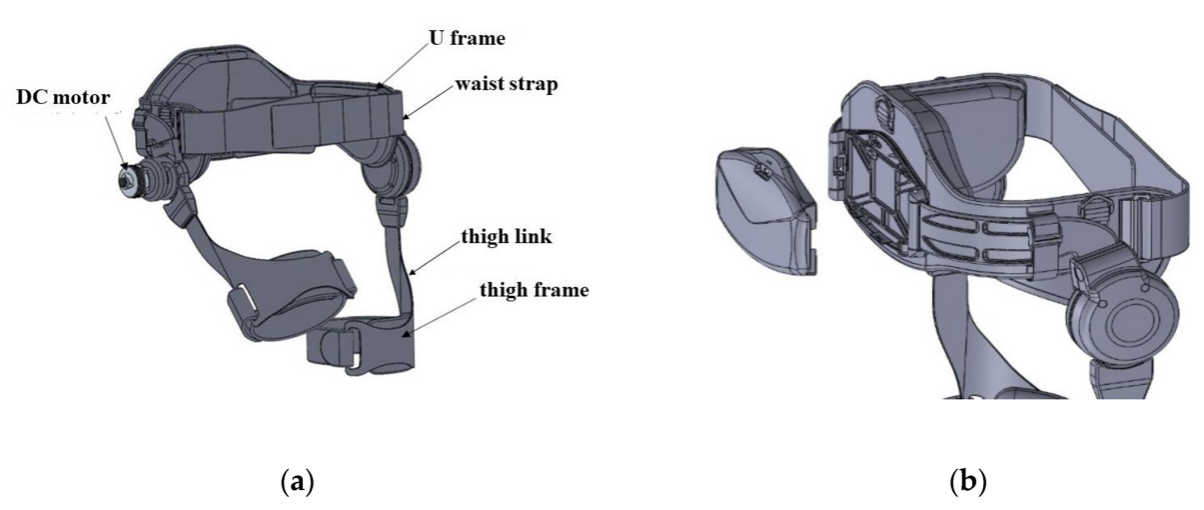
Figure 2: Proposed robotic hip exoskeleton design, and back pack for integration of electric devices [5]
This hip exoskeleton replaces the extra sensors for torque at joints by a linear extended state observer (LESO) to estimate the torque applied by wearers and uncertainty brought by humans and the exoskeletons. Based on this LESO, a fast terminal sliding mode controller (FTSMC) was developed to track how the exoskeletons move during the rehabilitation, which does not need the complex model in the process. To certify this robotic exoskeleton's function, researchers did tests in rehabilitation experiments on walking, gait rehabilitation while suffering instant spasms and tremors, rehabilitation experiments on ascending, walking experiments for different subjects, and evaluation of rehabilitation assistance. The results of the walking experiment show that under high-speed walking, the robotic exoskeleton will have a larger disturbance, and the linear active disturbance rejection controller (LADRC) will perform poor traction. However, the experiments reveal that the LESO-based FTSMC fails under continuous severe disturbances in gait rehabilitation, rendering the robotic hip exoskeleton ineffective during incidents like sustained spasms.
2.2. Knee exoskeleton robots
The knee joint plays a crucial role in transitioning from sitting to standing, with torque controllability being one of the most critical factors to consider. M. K. Shepherd and E. J. Rouse innovatively added springs in the series elastic actuator (SEA). They discussed the advantages of this new SEA brings in "Design and Validation of a Torque-Controllable Knee Exoskeleton for Sit-to-Stand Assistance" in IEEE/ASME Transactions on Mechatronics. They chose to add a series spring between the transmission and output in the actuator [6]. The accurate measurement of torque, which has been used in the latter feedback control, will be given by measuring the deflection of the spring, and because of the less noise the deflection of the spring will be made than strain-gauges, the filtering can be decreased, and controllability will be improved. Furthermore, by adding a spring between the load and transmission, small and precise changes in torque can be created by small movements in the transmission. The spring also separates the drivetrain inertia and friction from the output, which gives more time to make adjustments when positional perturbations are met. The high strength of the spring lets the sit-stand task be achieved by smaller thickness and stiffness, which control torque under higher accuracy and decrease output impedance. Although using the spring will decrease torque bandwidth, the bandwidth and output impedance of using the spring are acceptable for the sit-to-stand task.
2.3. Ankle exoskeleton robot
Ankle rehabilitation is crucial after injury, and the ankle is also a key consideration in gait rehabilitation training. Ahmetcan Erdogan et. Al introduced one ankle exoskeleton called AssistOn-Ankle in their article “A reconfigurable ankle exoskeleton with series-elastic actuation.” The AssistOn-Ankle is a reconfigurable, parallel mechanism-based ankle exoskeleton [7]. Unlike previous ankle exoskeletons, AssistOn-Ankle features advanced reconfigurable kinematics and Bowden-cable-driven series elastic actuation, setting it apart from its predecessors. Every exoskeleton should be safe and conform to the human body structure. In AssistOn-Ankle, active back-drivability is exerted by utilizing series-elastic actuators in this design, and these actuators can measure the implicit force and implied software torque limits, which work together to ensure the safety of AssistOn-Ankle. By using Bowden-cable transmission, the size of AssistOn-Ankle can be decreased by placing the battery units and controller into the backpack. The small size of AssistOn-Ankle makes it a mobile assistance device. AssistOn-Ankle adds compliant elements between the Bowden cable-driven disk and the output link to ensure both high-fidelity force control for assisting patients and low output impedance which will make a safe system. This design reduces the need for high-precision devices. Additionally, the Bowden cable-driven actuator achieves precise force control through robust motion control of the compliant coupling element's deflection.
2.4. Successful commercial lower-limb exoskeleton robots
One of the most prominent and innovative products in the field of lower limb exoskeletons is HAL (Hybrid Assistive Limb), developed by Cyberdyne, a pioneering exoskeleton company in Japan. HAL for Medical Use has achieved a significant milestone by becoming the first exoskeleton globally to obtain CE Marking [CE 0197] as a robotic medical device, underscoring its safety and effectiveness. The earliest designs of the HAL series machine are shown in Figure 3 [8].
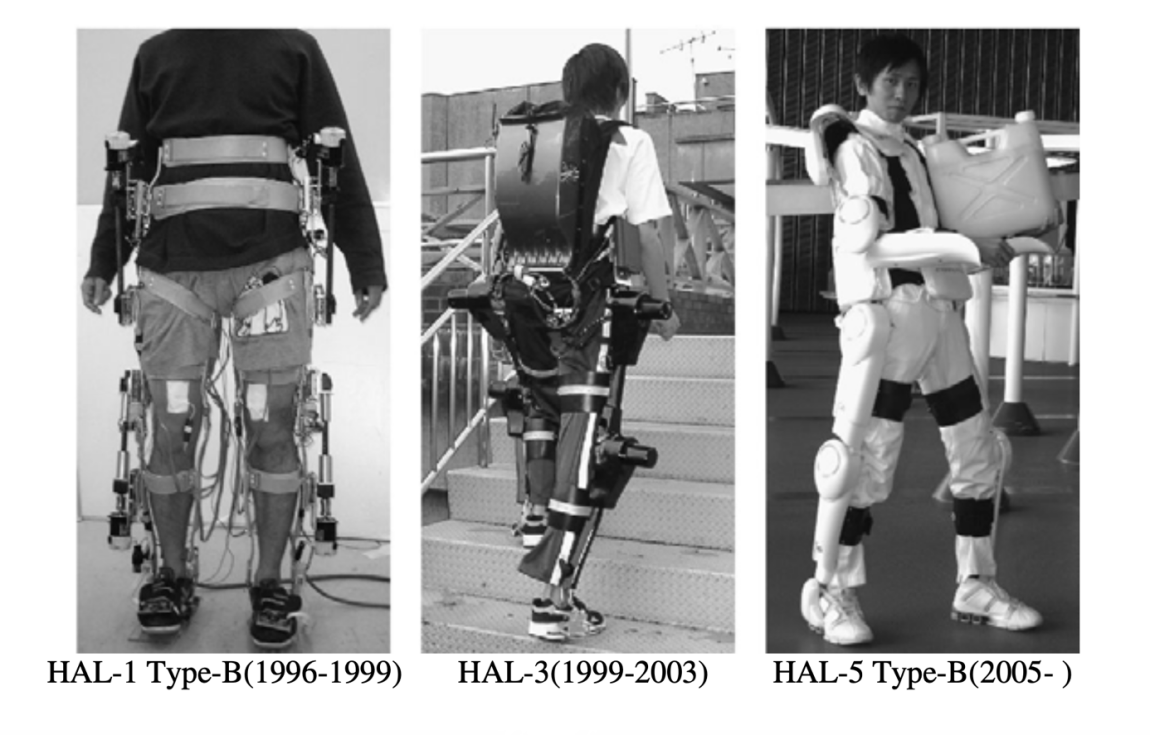
Figure 3: The earliest generations of HAL series exoskeleton robots [8]
The article “HAL: Hybrid Assistive Limb Based on Cybernics” is included in a published book. This article mainly discussed the important algorithms for HAL, to be more specific, a hybrid control system consisting of a ‘Cybernic Voluntary Control (Bio-Cybernic Control)’ and ‘Cybernic Autonomous Control (Cybernic Robot Control)’ [6]. These algorithms ensure HAL can work well for various types of users, such as healthy people and people with walking impairments. The Bio-Cybernic Control is designed to assist the motion of healthy individuals by responding to the wearer's actions triggered by bioelectrical signals, particularly muscle activity. However, for people with walking problems, their lower limbs may not release any signals. Expectation of their motion is one of the necessary parts of the exoskeleton algorithm. HAL has the Cybernic Autonomous Control system, which has already succeeded in HAL-3 that enhances healthy people’s ability to walk, stair-climbing, stand up from a chair, and fit his/her body conditions [8]. The Cybernic Autonomous Control is built by the floor reaction forces and joint angles. Despite these advancements, challenges remain in exoskeleton technology. Notably, there is currently no technology capable of directly detecting human intentions in everyday life conditions. Therefore, the authors want to build intention-based support that is based on the current motion or the motion caused by the intention to expect the next step motion. During walking, a human’s center of gravity will shift, so if HAL can detect the center of gravity’s movement, then it can predict the human’s movement and give support. The HAL research group has developed an algorithm capable of detecting key walking events, including the initiation and termination of walking, as well as the onset of leg swinging. This algorithm can work with floor reaction force when the patient can balance their weight balance in the lateral plane by holding a walking frame. HAL research group divided the process of walking into three parts: the swing phase, the landing phase, and the support phase. The function of the swing phase is built by the data collected from healthy people, and it use constant-value control for landing posture because, during the landing phase, the knee joint will be bent by the weight of the human itself and excess of the tolerance of torque. This algorithm has been validated through experimentation. In one study, a 57-year-old male patient with spinal cord injury (SCI) successfully used HAL with Cybernic Autonomous Control. During supported movement, the patient's hip and knee joints demonstrated angular patterns similar to those of healthy individuals [8].
3. Conclusion
Several innovations of lower limb robot exoskeletons for providing rehabilitation and assistance have been reported in this overview. The University of California, Berkeley, achieved the first functional load-carrying and energetically autonomous exoskeleton in the world then the exoskeleton is not just the image in the movie or novel, it became real stuff to make. In the rehabilitation area, the lower limb exoskeleton aims to help the reconstruction of the walking system of patients. Just like the human body, the three body parts hip, knee, and ankle are the most important parts that make a great contribution to walking, and the exoskeleton can be broken down into these three parts. This overview mainly focuses on some innovation of skills or structures that can help the function of these three parts. Hip exoskeleton motion control algorithms are typically complex, and managing user-induced uncertainties often requires additional medical supervision. Shi-Heng Hsu et al. made a new algorithm observer and controller to simplify the algorithm for the hip part. For the knee exoskeleton, because of the rotation of this joint, torque control with high accuracy is important. M. K. Shepherd and E. J. Rouse innovatively added springs in the series elastic actuator (SEA). The high-strength springs can effectively perform the required tasks with reduced thickness and optimized stiffness, and this makes the spring a good choice for high-accuracy torque control and low output impedance. For the ankle exoskeleton, ankle joints are always fragile, so the safety of the exoskeleton is one of the crucial factors. Ahmetcan Erdogan et. Al makes one ankle exoskeleton called AssistOn-Ankle. The AssistOn-Ankle is based on advanced reconfigurable kinematics and Bowden-cable-driven series elastic actuation, and these innovations guarantee the safety and the smaller size of this exoskeleton, this design reduces the requirement for high-precision components while maintaining cost-effectiveness. In the last paragraph, this paper analyzes the algorithm of the HAL lower-limb exoskeleton, which is already used in rehabilitation and is successful in the commercial aspect. This algorithm shows how the HAL research group makes the algorithm for especially people without the ability to move their legs. Nowadays, the lower-limb exoskeleton for rehabilitation uses an already established mature system and continues to develop details like mechanic structures. The most significant anticipated advancements in exoskeleton technology are expected to come from innovations in materials science and detection technologies. If brain signal detection technology is successfully advanced, I believe there will be an impressive improvement for all exoskeleton robots.
References
[1]. Pons, J. L. (2010). Rehabilitation Exoskeletal Robotics. IEEE Engineering in Medicine and Biology Magazine, 29(3), 57-63. https://doi.org/10.1109/MEMB.2010.936548
[2]. Hussain, F., Goecke, R., & Mohammadian, M. (2021). Exoskeleton robots for lower limb assistance: A review of materials, actuation, and manufacturing methods. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 235(12), 1375-1385. https://doi.org/10.1177/09544119211032010
[3]. Kazerooni, H., & Steger, R. (2006). The Berkeley Lower Extremity Exoskeleton. Journal of Dynamic Systems, Measurement, and Control, 128(1), 14-25. https://doi.org/10.1115/1.2168164
[4]. Yan, T., Cempini, M., Oddo, C. M., & Vitiello, N. (2014). Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robotics and Autonomous Systems, 64, 120-136. https://doi.org/10.1016/j.robot.2014.09.032
[5]. Hsu, S. H., Changcheng, C., Lee, H. J., & Chen, C. T. (2021). Design and Implementation of a Robotic Hip Exoskeleton for Gait Rehabilitation. Actuators, 10(9), 212. https://doi.org/10.3390/act10090212
[6]. Shepherd, M. K., & Rouse, E. J. (2017). Design and Validation of a Torque-Controllable Knee Exoskeleton for Sit-to-Stand Assistance. IEEE/ASME Transactions on Mechatronics, 22(4), 1695-1704. https://doi.org/10.1109/TMECH.2017.2704521
[7]. Erdogan, A., Celebi, B., Satici, A. C., & Patoglu, V. (2017). Assist On-Ankle: a reconfigurable ankle exoskeleton with series-elastic actuation. Autonomous Robots, 41(3), 743-758. https://doi.org/10.1007/s10514-016-9551-7
[8]. Sankai, Y. (2010). HAL: Hybrid Assistive Limb Based on Cybernics. In M. Kaneko & Y. Nakamura (Eds.), Robotics Research (pp. 25-34). Springer. https://doi.org/10.1007/978-3-642-14743-2_3
Cite this article
Li,H. (2025). Annotations on Lower-Limb Exoskeleton in Different Parts and Successful Commercial Rehabilitation Robots . Applied and Computational Engineering,128,113-118.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 5th International Conference on Materials Chemistry and Environmental Engineering
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Pons, J. L. (2010). Rehabilitation Exoskeletal Robotics. IEEE Engineering in Medicine and Biology Magazine, 29(3), 57-63. https://doi.org/10.1109/MEMB.2010.936548
[2]. Hussain, F., Goecke, R., & Mohammadian, M. (2021). Exoskeleton robots for lower limb assistance: A review of materials, actuation, and manufacturing methods. Proceedings of the Institution of Mechanical Engineers, Part H: Journal of Engineering in Medicine, 235(12), 1375-1385. https://doi.org/10.1177/09544119211032010
[3]. Kazerooni, H., & Steger, R. (2006). The Berkeley Lower Extremity Exoskeleton. Journal of Dynamic Systems, Measurement, and Control, 128(1), 14-25. https://doi.org/10.1115/1.2168164
[4]. Yan, T., Cempini, M., Oddo, C. M., & Vitiello, N. (2014). Review of assistive strategies in powered lower-limb orthoses and exoskeletons. Robotics and Autonomous Systems, 64, 120-136. https://doi.org/10.1016/j.robot.2014.09.032
[5]. Hsu, S. H., Changcheng, C., Lee, H. J., & Chen, C. T. (2021). Design and Implementation of a Robotic Hip Exoskeleton for Gait Rehabilitation. Actuators, 10(9), 212. https://doi.org/10.3390/act10090212
[6]. Shepherd, M. K., & Rouse, E. J. (2017). Design and Validation of a Torque-Controllable Knee Exoskeleton for Sit-to-Stand Assistance. IEEE/ASME Transactions on Mechatronics, 22(4), 1695-1704. https://doi.org/10.1109/TMECH.2017.2704521
[7]. Erdogan, A., Celebi, B., Satici, A. C., & Patoglu, V. (2017). Assist On-Ankle: a reconfigurable ankle exoskeleton with series-elastic actuation. Autonomous Robots, 41(3), 743-758. https://doi.org/10.1007/s10514-016-9551-7
[8]. Sankai, Y. (2010). HAL: Hybrid Assistive Limb Based on Cybernics. In M. Kaneko & Y. Nakamura (Eds.), Robotics Research (pp. 25-34). Springer. https://doi.org/10.1007/978-3-642-14743-2_3