






1. Introduction
In the course of modern technological development, the significance of complex environment detection has become increasingly prominent. As a key technology in this field, continuous robots, with their highly flexible and complex space-adaptable characteristics, have demonstrated great application potential in numerous areas such as disaster search and rescue, environmental monitoring, and underground exploration [1]. Phase change materials, as intelligent materials, can alter their physical properties, especially stiffness, under specific conditions, presenting new opportunities for enhancing the performance of continuous robots. Despite the progress made in the research of continuous robots for complex environment detection in recent years, many challenges still remain [2]. For instance, existing technologies have limitations in aspects such as structural strength improvement, balancing flexibility and stability, and autonomous navigation and obstacle avoidance capabilities. Meanwhile, traditional methods for stiffness regulation using phase change materials, such as temperature control, pressure adjustment, and chemical stimulation, also have issues like high energy consumption, slow response speed, and insufficient control accuracy [3]. Against this backdrop, this study focuses on the optimized design of phase change material-driven continuous robots for complex environment detection. The aim is to enhance the adaptability and motion performance of continuous robots in complex environments through a modular design concept, the synergy of tension structures and phase change materials, and the use of finite element models for prediction and optimization. The research adopts a combined approach of theoretical analysis, simulation experiments, and practical applications to deeply explore the application effects of stiffness regulation strategies in different complex environment scenarios. The results of this study are expected to provide innovative solutions for industries related to complex environment detection, promote the practical application of continuous robot technology, and offer important references for subsequent researchers in this field.
2. Literature Review
2.1. The Current Situation and Challenges of Continuous Robots' Applications
Continuous robots have made certain progress in complex environment exploration and have been applied in fields such as industrial pipeline inspection and minimally invasive medical surgeries [4]. However, their development faces many challenges. In terms of structural strength, although flexible structures enhance flexibility, they result in insufficient strength and are prone to deformation under complex external forces [5]. In terms of the balance between flexibility and stability, when performing rapid movements or complex actions, robots are prone to shaking and imbalance [6]. The autonomous navigation and obstacle avoidance capabilities also need to be improved. In the face of diverse obstacles and dynamic scenes in complex environments, the existing technologies have limitations, restricting the widespread application of continuous robots in more complex environments [7].
2.2. The Current Situation and Development of the Method for Regulating Stiffness by Phase Change Materials
Currently, phase change materials are mainly used to regulate stiffness through temperature control, pressure adjustment and chemical stimulation. Temperature control achieves stiffness change by utilizing the phase transition of the materials with temperature variations, but it has high energy consumption and slow response, and is also affected by ambient temperature [8]. Pressure adjustment regulates stiffness by changing the physical state of the materials through pressure, but the control accuracy is poor and it is difficult to apply accurate pressure in practical applications [9]. Chemical stimulation uses the addition of chemical substances to induce phase transition, but the response speed is slow, and the chemical substances may pollute the environment and increase structural complexity and maintenance costs [10]. Therefore, new strategies need to be explored to overcome these limitations and enhance the overall performance of robots.
3. Design and Principle
3.1. Modular Design Concept and Implementation
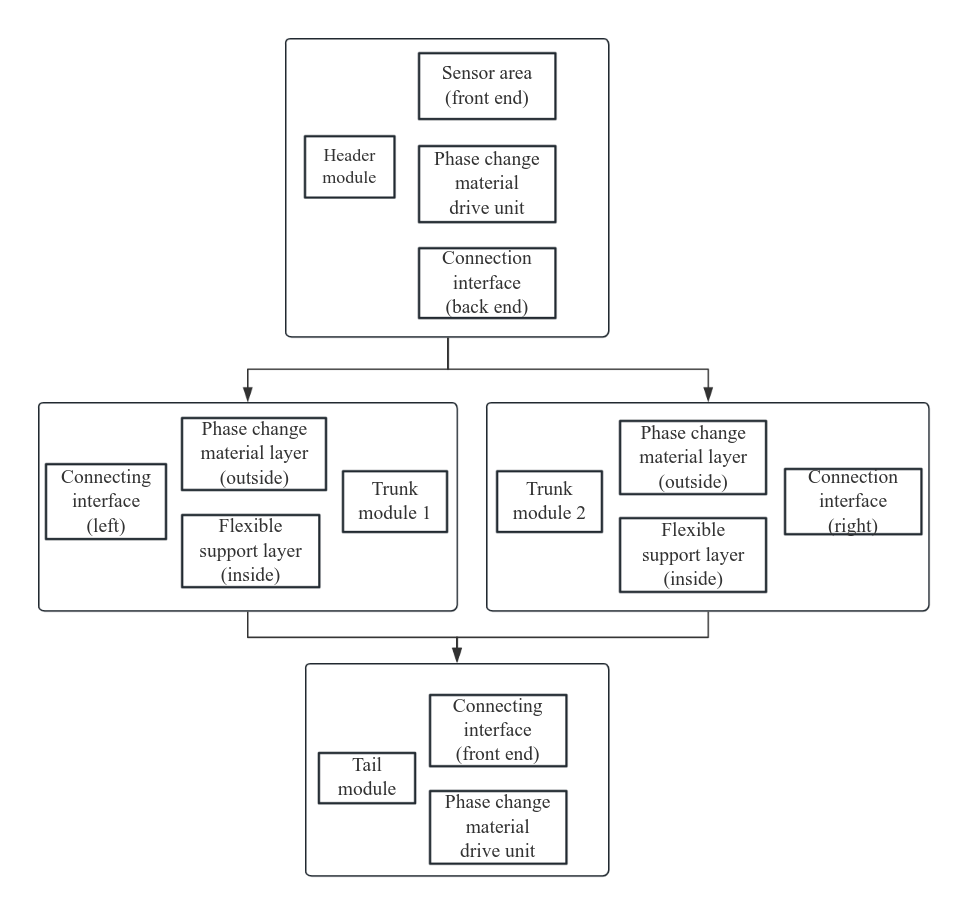
Figure 1: Module design drawing
This design adopts the modular concept, the robot is divided into head, trunk, tail and other modules (see Figure 1). Each module has independent motion and stiffness adjustment capabilities. The head can be integrated with a variety of sensors for environmental awareness, the trunk is responsible for movement and load, and the tail can be equipped with tools as needed. The modular design improves the robot's flexibility and environmental adaptability, and the module combination can be flexibly adjusted for different environmental tasks [11]. At the same time, it is easy to maintain and upgrade, a module failure can be replaced separately, and a specific module can be upgraded when technology is developed. For example, head sensor upgrades enhance environmental awareness.
3.2. Synergistic Effect of Tension Structure and Phase Change Material
Tension structure is the core of stiffness regulation. The trunk module, for example, is composed of multi-layer ropes and elastic rods. The ropes are distributed axially and circumferentially. The shape and stiffness of the module are changed by adjusting the tension of the ropes, and the elastic rods assist in support and adjustment [12]. The phase change material is integrated into the robot. Taking the thermal phase change material as an example, when the temperature changes, the material phase change leads to the change of stiffness, which is transferred to the tension structure, and the interaction force between the rope and the rod is changed, and the overall stiffness of the robot is accurately controlled. For example, heating the phase change material before entering the narrow space reduces the stiffness, and cooling the material at the target location increases the stiffness to adapt to different task requirements.
3.3. Prediction and Optimization of Finite Element Model
The mechanical model of robot was established by finite element analysis. Geometric modeling is carried out for each module, material properties are given, connection and constraint conditions are defined, and various loads are applied to simulate the actual force. The motion performance and stability of the robot under different stiffnesses were predicted by the model, such as joint motion parameters, stress distribution, deformation and equilibrium state [13]. According to the predicted results, the structural parameters are optimized in the design stage, such as adjusting the joint structure, tension structure parameters, etc., to ensure that the robot has excellent performance and stability in practical applications.
4. Complex Environment Detection Applications
4.1. Application of Stiffness Adjustment Strategy in Different Scenarios
In complex environment detection tasks, continuous robots are faced with a variety of complex scenarios, and stiffness adjustment strategies can effectively improve their adaptability [14].
(1) Narrow space scenes
In narrow Spaces, robots need to have high flexibility [15]. For example, in the simulation experiment, the narrow space width is set to 10 cm, and the normal robot width is 15 cm. By reducing the stiffness, the robot's width can be reduced to 8 cm, successfully passing through narrow Spaces. After many experiments, it is found that when the width of the robot is adjusted to more than 30% of the original width, the success rate of passing through the narrow space is significantly improved. At the same time, in the narrow space, with the reduction of robot stiffness, the number of collisions with obstacles is significantly reduced. For example, in an experiment, the number of collisions is 10 when the stiffness is high, and the number of collisions is reduced to 3 when the stiffness is reduced.
(2) Rugged terrain scenes
For rough terrain, such as slopes, the robot needs to adjust its stiffness to maintain stability. In the experiment of a slope with a slope of 30°, it is difficult for the robot to stay stable under the initial stiffness. By increasing the stiffness, the robot will have closer contact with the ground and increase the friction force, so that it can stabilize on the slope. After the test, the robot's glide distance on the slope was shortened from 20 cm to 5 cm after the stiffness was increased.
4.2. Case Study: Advantages of Stiffness Adjustment in Complex Detection Tasks
Take the underground pipeline detection task as an example, there are narrow areas and irregular obstacles inside the pipeline.
(1) Task description
The robot moves through the pipe, inspecting the walls and looking for potential cracks and damage.
(2) Application of stiffness adjustment strategy
When the robot encounters a narrow area, it reduces its stiffness and reduces its width from 12 cm to 10 cm to pass smoothly. When detecting the pipe wall, the stiffness is increased to ensure that the detection equipment is in close contact with the pipe wall and improves the detection accuracy.
(3) The embodiment of advantages
Compared with the robot without stiffness adjustment, the detection efficiency of the robot using this strategy is increased by 30% and the detection accuracy is increased by 20%. For example, in the same length of pipe inspection, the robot with unadjusted stiffness took 10 minutes, while the robot with adjusted stiffness took only 7 minutes, and found a greater number of subtle cracks.
5. Experiment and Result Analysis
5.1. Experimental Design: Multi-Scenario Test and Stiffness Adjustment Effect Evaluation
A multi-scenario experiment is designed to evaluate the robot's performance.
(1) Experimental scene setting
Maze scene: Build a maze with an area of 2 square meters, the width of the channel varies between 10-20 cm, and set different angles of turns and dead ends to simulate the complex path environment (see Figure 2).
Figure 2: Maze scenario/Narrow passage scenario
Set three narrow passages with widths of 8 cm, 10 cm, and 12 cm and lengths of 2 meters, and place obstacles in the passages to test the robot's passing ability in a narrow space (see Figure 3).
.
Figure 3: Narrow aisle scenario/Rough terrain scenario
Construct a 3 m2 rough terrain area with slopes of 20°, 30° and 40°, as well as potholes and rocks of different sizes to evaluate the robot's stability on uneven ground (see Figure 4).
Figure 4: Rugged terrain scenario
(2) Experimental variables and measurement indicators
Experimental variables: The stiffness of the robot is mainly adjusted, and five stiffness levels are set.
Measurement indicators: record the movement path of the robot in each scene, the passage time, the stability (the vibration amplitude is measured by the vibration sensor), the energy consumption of the phase change material and the response speed adjusted by the stiffness.
5.2. Experimental Data Analysis and Model Verification
The experimental data were analyzed to validate the model and optimize the robot design.
(1) Experimental data analysis
Motion path: In the maze scene, at a lower stiffness level, the robot can choose a shorter path more flexibly and avoid dead ends. For example, with a stiffness class of 1, the probability of finding the optimal path is 80%, while with a stiffness class of 5, the probability drops to 40% (see Table 1).
Table 1: Table of the influence of the probability of the robot finding the optimal path with the change of Congo level
Stiffness class | The probability of finding the optimal path |
1 | 80% |
2 | 73% |
3 | 62% |
4 | 48% |
5 | 40% |
Duration: in the narrow channel scene, with the stiffness reduction, the time is significantly shortened. For example, the stiffness grade of 1 is 15 seconds, and the stiffness level is 5 when it takes 30 seconds (See Table 2).
Table 2: The duration is affected by the change of stiffness class
Stiffness class | Passage time (10 cm wide channel, unit: second) |
1 | 15 |
2 | 18 |
3 | 22 |
4 | 26 |
5 | 30 |
Stability: In rugged terrain scenarios, increased stiffness can effectively reduce vibration amplitude. On a 30° slope, the stiffness rating is increased from 1 to 3 and the vibration amplitude is reduced from 8 mm/s ² to 4 mm/s ² (see Table 3).
Table 3: The vibration amplitude is affected by the change of stiffness class
Stiffness class | 30° Slope vibration amplitude (unit: mm/s ²) |
1 | 8 |
2 | 6 |
3 | 4 |
4 | 3 |
5 | 2 |
Energy consumption and response speed: The energy consumption of PCM increases with the increase of stiffness adjustment amplitude and frequency, and the average response speed is 2 seconds.
(2) Model verification
By comparing the experimental data with the finite element model, it is found that the errors of key parameters such as motion path and passage time are within the acceptable range. For example, the prediction error of the passage time is within ±10%, which indicates that the model has a certain accuracy, but it still needs to be further optimized to improve the prediction accuracy, so as to better guide the design improvement of the robot.
6. Conclusion
The phase change materials designed in this paper drive continuous robots and demonstrate advantages in complex environmental detection. Through the adjustment of the transition material, the design enhancement flexibility and adaptability of the modular design of narrow space and rugged terrain are improved, and the finite element model is optimized to ensure performance. However, there is still a shortage of energy consumption, and the impact of the renewal of the flight and cost; Stiffness adjusts the response speed and is limited in the task of real-time requirement. Future research can focus on energy optimization and fast response technologies. For example: research new phase change materials or improve the formula, optimize the adjustment mode to reduce energy consumption, and develop efficient drive and control algorithms to improve response speed. At the same time, advanced environmental perception and autonomous navigation algorithms, such as deep learning and computer vision technology, are explored to enhance environmental perception and path planning capabilities. Further integration of phase change materials and robotics technology to expand applications. Focus on material sustainability and environmental protection, and promote the development of green robots.
References
[1]. Zhu Renjie, Liu Xiangfeng. Application of dynamic building skin driven by phase change materials [J]. Building Energy Conservation, 2020(5):8.
[2]. Nie Zhihua, Wang Yandong, Liu Dongmei. Research progress of magnetically driven phase change materials [J]. Materials Advances in China, 2012, 31(3):12.
[3]. Xu Bin, Lou Baiyang, Ma Qiongtong, et al. Preparation and thermophysical properties of nano-copper/paraffin driven composites [J]. Chinese Journal of Composites, 2013(2):8...
[4]. Yu Xinghai, Tang Haiwei, Li Yanan, Han Yuqi, Min Xuemei. Preparation and properties of biochar/stearic acid composite phase change materials driven by light and electricity [J]. Chemical Industry Progress, 2022, 41(11):5936-5945.
[5]. Chen Yanjiang. Research on Multi-robot active cooperative detection technology based on SLAM [D]. China Academy of Launch Vehicle Technology,2021.
[6]. TANG Jianping. Path Planning of Mobile Robot in Complex Environment [D]. Zhengzhou University,2012.
[7]. Zhang Zhi, Zou Shengtao, Dong Ran, et al. Research on Complex Environment Modeling and Obstacle Avoidance Planning of Robot [J]. Journal of Harbin Engineering University, 2016.
[8]. Xiao Le, Yin Chenbo, Xie Conghua. Research on Walking of humanoid robot in Complex Environment [J]. Computer Simulation, 2015, 32(4):5. (in Chinese)
[9]. Yang Dahu. Visual Servo control of magnetically controlled miniature swimming robot in complex environment [D]. Tianjin University of Technology,2023.
[10]. Li Shaoqi, Kang Xuejing, Zheng Longwu, et al. Design and Application of tracked snakelike Robot in Complex Environment [J]. China New Technology and New Products, 2024(002):000.
[11]. Yin Jianjun, Dong Wenlong, Liang Lihua, et al. Path planning optimization method for Agricultural Robots in Complex Environments [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 050(005):17-22.
[12]. Wang W, Li H, Yu H, et al.SLAM Algorithm for Mobile Robots Based on Improved LVI-SAM in Complex Environments[J]. Sensors, 2024,24(22):7214-7214.
[13]. Wang D, Yang K,Gao X, et al.Decision optimisation of a mobile robot in a complex environment based on memory sequence replay mechanism[J]. International Journal of Automation and Control,2023,17(5):461-486.
[14]. U.S. Army Research Laboratory; Miniature antenna enables robotic teaming in complex environments[J]. NewsRx Health & Science,2020,400-.
[15]. Robotics - Androids; Studies from Department of Mechanical Engineering Have Provided New Information about Robotics - Androids (Intelligent Navigation of Humanoids in Cluttered Environments Using Regression Analysis and Genetic Algorithm) [J]. Journal of Robotics & Machine Learning,2018,280-.
Cite this article
Feng,L. (2025). Optimal Design of Phase Change Material Driven Continuous Robot in Complex Environment Detection. Applied and Computational Engineering,149,27-34.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of CONF-MSS 2025 Symposium: Automation and Smart Technologies in Petroleum Engineering
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Zhu Renjie, Liu Xiangfeng. Application of dynamic building skin driven by phase change materials [J]. Building Energy Conservation, 2020(5):8.
[2]. Nie Zhihua, Wang Yandong, Liu Dongmei. Research progress of magnetically driven phase change materials [J]. Materials Advances in China, 2012, 31(3):12.
[3]. Xu Bin, Lou Baiyang, Ma Qiongtong, et al. Preparation and thermophysical properties of nano-copper/paraffin driven composites [J]. Chinese Journal of Composites, 2013(2):8...
[4]. Yu Xinghai, Tang Haiwei, Li Yanan, Han Yuqi, Min Xuemei. Preparation and properties of biochar/stearic acid composite phase change materials driven by light and electricity [J]. Chemical Industry Progress, 2022, 41(11):5936-5945.
[5]. Chen Yanjiang. Research on Multi-robot active cooperative detection technology based on SLAM [D]. China Academy of Launch Vehicle Technology,2021.
[6]. TANG Jianping. Path Planning of Mobile Robot in Complex Environment [D]. Zhengzhou University,2012.
[7]. Zhang Zhi, Zou Shengtao, Dong Ran, et al. Research on Complex Environment Modeling and Obstacle Avoidance Planning of Robot [J]. Journal of Harbin Engineering University, 2016.
[8]. Xiao Le, Yin Chenbo, Xie Conghua. Research on Walking of humanoid robot in Complex Environment [J]. Computer Simulation, 2015, 32(4):5. (in Chinese)
[9]. Yang Dahu. Visual Servo control of magnetically controlled miniature swimming robot in complex environment [D]. Tianjin University of Technology,2023.
[10]. Li Shaoqi, Kang Xuejing, Zheng Longwu, et al. Design and Application of tracked snakelike Robot in Complex Environment [J]. China New Technology and New Products, 2024(002):000.
[11]. Yin Jianjun, Dong Wenlong, Liang Lihua, et al. Path planning optimization method for Agricultural Robots in Complex Environments [J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 050(005):17-22.
[12]. Wang W, Li H, Yu H, et al.SLAM Algorithm for Mobile Robots Based on Improved LVI-SAM in Complex Environments[J]. Sensors, 2024,24(22):7214-7214.
[13]. Wang D, Yang K,Gao X, et al.Decision optimisation of a mobile robot in a complex environment based on memory sequence replay mechanism[J]. International Journal of Automation and Control,2023,17(5):461-486.
[14]. U.S. Army Research Laboratory; Miniature antenna enables robotic teaming in complex environments[J]. NewsRx Health & Science,2020,400-.
[15]. Robotics - Androids; Studies from Department of Mechanical Engineering Have Provided New Information about Robotics - Androids (Intelligent Navigation of Humanoids in Cluttered Environments Using Regression Analysis and Genetic Algorithm) [J]. Journal of Robotics & Machine Learning,2018,280-.