






1. Introduction
The integration of robotic technology in modern manufacturing has significantly improved production efficiency and product quality. In welding, robots equipped with multi-axis motion control, vision-guided systems, and adaptive welding parameters achieve precise seam tracking [1]. In the automotive industry, six-axis reduce welding defect rates by 85% and shorten production cycles by 60%, while laser seam trackers compensate for thermal deformation in real time. In logistics, industrial robots are transforming warehousing and production workflows [2]. Amazon’s Kiva system, for example, deploys over 500,000 mobile robots for automated storage and picking. Additionally, inspection robots play a crucial role in Industry 4.0 [3]. In the semiconductor industry, SCARA robots with high-precision laser sensors and high-speed CCD cameras detect micron-level defects within 0.5 seconds, achieving 99.99% accuracy [4]. With advancements in 5G, AI, and digital twin technology, robotics is evolving beyond single-task execution to intelligent decision-making. This paper explores the economic efficiency of robotics in welding, handling, and inspection. It also examines the differences between collaborative and traditional industrial robots, as well as the impact of deep learning and 5G on the industry. Through data analysis and case studies, this research provides theoretical insights and practical pathways for developing manufacturing ecosystems and enhancing human-machine cooperation.
2. Applications of robotics in modern manufacturing
Welding Robots: With the rapid development of global manufacturing, intelligent welding technology has seen widespread adoption, significantly improving welding quality, worker safety, and productivity. Since the introduction of the first industrial welding robot, they have become indispensable in industries such as the automotive industry, aerospace, shipbuilding, mechanical processing, electronics, and food manufacturing [5, 6]. Leading manufacturers, including Japan's Motoman, FANUC, and Yaskawa, Germany's KUKA, Sweden's ABB, the United States' Adept Technology and Italy's COMAU have driven innovations in this field [7-9]. Despite their extensive applications, welding robots still face challenges that require further optimization. One major issue is the time-consuming axis calibration process. Downtime caused by recalibration can lead to substantial economic losses in automated lines. Improving TCP (Tool Centre Point) auto-calibration technology with intelligent detection methods and 5G-enabled feedback systems could significantly enhance efficiency. Another challenge is the real-time weld seam tracking. Arc welding robots currently lack dynamic tracking and feedback mechanisms, which affects positioning accuracy. Integrating AI-driven seam tracking systems could enhance welding reliability and stability.
Industrial Robots in Logistics: As global competition intensifies, manufacturers increasingly rely on robots to optimize logistics. Intelligent logistics systems enhance operational efficiency through real-time data processing and automated workflows [10-12]. A key challenge in logistic robotics is path planning. While conventional approaches focus on finding the shortest possible route in the least amount of time, future warehouse environments require adaptive algorithms tailored to dynamic logistics challenges. Traditional single-algorithm approaches struggle to meet modern logistics demands. Hybrid intelligent algorithms, such as integrating artificial potential field (APF) algorithms with machine learning techniques, offer improved obstacle avoidance and route optimization. By leveraging advanced algorithmic optimization and real-time data processing, industrial logistics robots will continue to drive improvements in transportation efficiency and production line safety, helping manufacturing enterprises enhance overall operational effectiveness.
Inspection Robots: The coal industry proposed the concept of coal mine robots relatively early. However, due to the limitations of the special environmental conditions in underground coal mines, the robot technologies in other surface industries are currently difficult to be directly applied to underground coal mines [13]. A coal mine robot is a machine that can rely on its own power and autonomous control ability to achieve certain specific mining functions. It can assist or replace human mining operations or operations at dangerous posts through methods such as being commanded by humans, pre-programming, and artificial intelligence planning. Inspection robots, equipped with visible-light cameras, infrared thermal imagers, sound sensors, multi-gas sensors, etc., can detect the operating conditions of equipment such as belt conveyors, identify valves, instruments, and foreign objects on belts, and issue timely alarms when faults are found. This not only reduces the labor intensity of inspection workers but also improves the quality of inspections [14]. At the same time, in response to the inspection requirements for dangerous gases such as gas in special areas of underground coal mines, some scientific research units have developed tracked mobile gas inspection robots, which may partially replace the work of gas inspectors in the future and achieve unmanned detection in dangerous areas [15]. The development of coal mine safety control robots will be a beneficial supplement to the formation of coal mine intelligent monitoring systems, enabling mine safety monitoring to have no blind spots or dead zones [16].
3. Case study: intelligent inspection robots in substations
3.1. Role of inspection robots in substation
With economic development and rising electricity consumption, power grids face increasing operational demands. Traditional manual inspections, relying on visual, auditory, and olfactory assessments, have limitations such as high labor costs, subjective data interpretation, and susceptibility to weather conditions. These challenges necessitate real-time, high-frequency monitoring solutions.
Intelligent inspection robots, equipped with high-definition cameras, infrared thermal imaging, sound detection devices, and AI-powered analytics, enable automated data collection, real-time transmission, intelligent analysis, and early warnings. By replacing manual inspections, these robots enhance equipment reliability and grid stability.
Early research on power inspection robots primarily emerged in Japan and the U.S. In the 1980, Japan introduced mobile robots using magnetic navigation and infrared thermal imaging to detect defects in high-voltage equipment. By the late 1980s, Japan developed underground pipeline monitoring robots capable of monitoring temperature, humidity, water levels, and gas concentrations. The 1990s saw further advancements, including turbine blade inspection and distribution line maintenance robots.
According to Globaldata, China's power transmission lines will increase from 1.15 million kilometers in 2014 to 1.59 million kilometers in 2020, and there is a large market demand for drone inspections [17]. The forecast of the China Business Industry Research Institute predicts that by 2025, the domestic civil drone market will reach 75 billion yuan, with the power industry accounting for about 6.7% (approximately 5 billion yuan). Currently, an annual labor cost of a substation operator is about 100,000 yuan. Deploying intelligent inspection system, integrated with automation, insulation monitoring, and video surveillance, accelerates the transition towards unmanned substations, significantly reducing long-term costs and enhancing operational safety [18]. These systems eliminate human exposure to hazardous conditions during extreme weather, improving personnel safety and yielding substantial social benefits.
3.2. Key features and functions of inspection robots
The intelligent power inspection robot system integrates a high-precision visible-light imaging module to periodically collecting equipment image data. AI-based visual analysis enables real-time diagnostics, covering instrument reading, indicator light status, mechanical component positioning, and isolator switch status. Deep learning algorithms achieve over 99.2% accuracy in complex lighting conditions. The system supports cloud storage and intelligent analysis for comprehensive equipment monitoring. The power inspection robot applies various advanced technologies for equipment status identification, as detailed below:
Firstly, the system employs an automatic localization and recognition technology for digital meters based on local feature matching. It first applies the Canny algorithm to accurately extract edge details from meter images. Next, the Speeded-Up Robust Features algorithm is used to identify and match image regions corresponding to pre-defined digital meter templates. To ensure numerical recognition accuracy, a digital template image database is constructed, and a support vector machine classification algorithm is trained. When a new digital image is captured, its features are extracted and compared with those in the database, allowing the system to output highly accurate numerical readings. Secondly, the isolator switch status recognition technology based on virtual line segment determination is implemented. It begins by employing region of interest extraction via template image feature matching to precisely locate the isolator switch in an image. Given the switch’s linear characteristics, the Hough transform algorithm is then used to assess whether the switch is in an open or closed state. Moreover, the system utilizes a virtual dial graphic model, where the switch handle acts as a pointer. Image processing techniques extract the relevant region from the original image, and straight-line segment detection algorithms determine the handle's position. By comparing the handle’s position with the virtual dial’s predefined angles, the system accurately identifies the switch status.
The power inspection robot is equipped with an infrared thermal imager, enabling it to capture infrared images of equipment and autonomously obtain real-time temperature readings. Infrared image temperature recognition technology determines temperature levels by analyzing infrared radiation intensity emitted by objects. Most manufacturers adopt similar recognition technologies, with thermal imagers categorized into two main types: cooled focal plane arrays and uncooled focal plane arrays. The majority of mainstream manufacturers use uncooled focal plane thermal imagers, which offer advantages over cooled focal plane imagers, including smaller size, lighter weight, lower power consumption, higher reliability, easier maintenance, and greater sensitivity.
3.3. Implementation of 5G communication in robotics
The intelligent inspection system integrates robotic control, multimodal sensor fusion, ultra-HD video surveillance, AI-driven pattern recognition, and BeiDou/GNSS-based navigation to establish an IoT-enabled framework. Equipped with multiple sensors, real-time operational data and video streams are transmitted to a cloud server via 5G CPE (Customer Premises Equipment). Operators monitor data and perform analysis via PCs or mobile devices, creating a closed-loop operational system.
To enhance 5G compatibility, the robot's Wi-Fi module is replaced with a 5G CPE module, ensuring seamless connectivity (Figure 1). The server adjusts communication modes to align with 5G network characteristics, enabling precise control of inspection tasks. The built-in cameras and industrial control computer (IPC) connect to an embedded switch, centrally managed via the 5G CPE module. Before transmission, data is encrypted and routed through a dedicated mobile communication line to access the internal power grid platform. Regarding data transmission protocols, the system employs HTTP protocol for robot operational data upload to the workstation; Real-Time Messaging Protocol (RTMP) for surveillance video data transmission to the workstation.
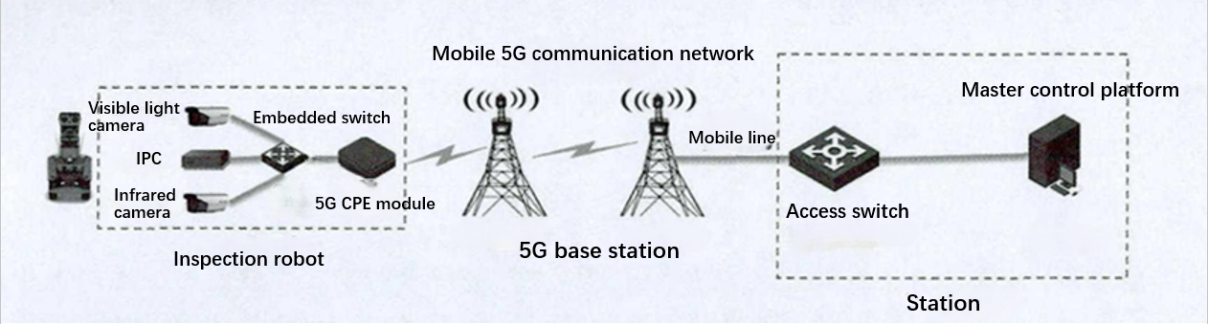
Figure 1: 5G intelligent inspection robot network topology
4. Challenges and solutions in implementing inspection robots
4.1. Efficiency and automation challenges
Traditionally relied on manual methods, where operators gather data using handwritten records or portable terminal devices. A single inspection can take over two hours. Given China's vast territory, substations are often located in challenging environments, including high-altitude areas, extreme heat, severe cold, strong winds, sandstorms, and heavy rainfall. These conditions make outdoor equipment inspections difficult. Traditional manual inspection models face significant limitations:
Low Work Efficiency: Operators endure harsh environments and physically demanding labor, reducing efficiency; Lack of Data Standardization and Accuracy: Manual inspections are inconsistent, making it difficult to ensure standardized and precise data collection; High Operational and Maintenance Costs: Increasing costs associated with workforce management and equipment maintenance add financial burdens, limiting the reliability of modern power systems.
These challenges hinder the safe and stable operation of power grids, highlighting the need for intelligent inspection technologies to overcome existing bottlenecks.
Modern intelligent inspection robots employ 3D spatial path planning and bidirectional dynamic walking control, achieving a positioning accuracy of ±5mm and a path repeatability error of less than 3%. Functionally, the system integrates multispectral imaging modules and infrared thermal cameras, enabling simultaneous visual inspection of equipment status and thermal distribution analysis. The data collection frequency reaches 20Hz, with a temperature measurement accuracy of ±0.5℃.
In automated control, the system interacts with the substation’s sequence control system via the OPC UA protocol, allowing it to autonomously verify circuit breaker open/close positions with a recognition accuracy of 99.87%. Engineering applications show that compared to traditional manual inspections:
Inspection efficiency increases by over 60%; Standardization of data collection improves by 85%; Operational and maintenance costs decrease by 40%.
This research provides an innovative technical solution for constructing intelligent substation maintenance systems and has significant theoretical and engineering value in promoting the development of unattended substations.
4.2. Technological and operational barriers
The operation of power inspection robots' visual systems faces several challenges, particularly in equipment maintenance. A major focus is enhancing the energy supply system through technological upgrades. To improve operational endurance and reduce energy replenishment frequency, a high-energy-density battery system integrated with dynamic energy-saving algorithms is essential. Achieving round-the-clock, fully autonomous operations requires an intelligent energy supply network incorporating autonomous charging docks and modular battery exchange devices. This is implemented through a three-tier technological strategy:
Adaptive Battery Management System (BMS): Optimizes charge and discharge curves to extend battery life and enhance energy efficiency.
Topology-Optimized Fast Charging Protocols: Improves charging efficiency, reducing downtime.
IoT-Enabled Smart Charging Matrix: Enables remote monitoring and intelligent scheduling of charging tasks.
This hybrid energy solution ensures that robots can continuously perform inspection tasks without interruptions. Additionally, by minimizing system standby energy losses, overall operational efficiency is enhanced, achieving a fully intelligent and automated inspection management loop for power facility maintenance.
4.3. Security and maintenance issues
Substation operations often encounter adverse weather conditions such as sandstorms, rain, snow, and thunderstorms. Intelligent inspection robots, supported by sensing technology and intelligent algorithms, conduct comprehensive monitoring of the substation equipment’s operational environment. This includes gas leakage detection, temperature and humidity measurement, and noise monitoring.
Equipped with temperature and humidity sensors, these robots enable real-time monitoring of environmental changes in substations. They also detect the concentration of oxides and organic substances in the air, effectively controlling the impact of external environmental factors on substation equipment performance.
Furthermore, intelligent inspection robots integrate computer vision technology to analyze environmental factors such as vegetation growth and pollutant presence within the substation area. This allows for accurate environmental monitoring. Through artificial intelligence and robotic learning technologies, these robots analyze environmental data to predict trends and provide early warnings of potential hazards. For example, climate monitoring can forecast temperature variations within the substation equipment’s operational zone over a specific period, ensuring stable electrical equipment operation under complex environmental conditions.
5. Conclusion
This paper highlights the crucial role of robotics in modern manufacturing, emphasizing improvements in efficiency, cost reduction, and safety. Robotics demonstrates significant potential in intelligence, automation, and cross-industry applications. In welding, six-axis welding robots in automotive manufacturing achieve high positioning accuracy, precisely tracking complex weld bead trajectories. Compared to manual welding, they greatly shorten production cycles, reduce defects, and lower the rejection rate and rework costs. Logistics robots minimize labor costs and error costs, while inspection robots enhance quality control by preventing defective products from advancing in production, reducing overall expenses. Moreover, in dangerous environments such as power grid inspection and underground coal mines, robots can replace human operations. Intelligent inspection robots ensure stable grid operation under adverse weather conditions, while coal mine robots monitor equipment and detect dangerous gases, reducing the safety risks for workers.
Future advancements in robotics will integrate more sophisticated algorithms and deep learning capabilities, enabling real-time production analysis and autonomous decision-making. Robots will dynamically optimize production by adjusting processing parameters based on quality data, enhancing product consistency. Their learning speed, image recognition ability, and generalization ability will improve, enabling them to deal with more complex scenarios. They will autonomously reconfigure production processes in response to changing demand, improving the flexibility of the production line. By interacting with edge computing platforms, they can achieve higher autonomy in complex environments. Beyond manufacturing, robotics will expand into industries such as healthcare, education, and agriculture. Surgical robots can achieve high-precision surgeries. In education, intelligent robots can assist in teaching to achieve personalized learning.
References
[1]. Ge Shirong, Zhu Hua. Current Situation and Development Trends of Rescue Robot Technology in Dangerous Environments. Coal Science and Technology, 2017, 45(5): 1-8.
[2]. Zhang Yi. Integration and Linkage Interaction Scheme of Multiple Systems for Coal Mine Safety Monitoring. Safety in Coal Mines, 2019, 50(6): 100-103.
[3]. Su Jian, Li Zaijuan. Design of the Sorting and Assembly Control System of Industrial Robots Integrating Vision and Ethernet Technologies. Machine Tool & Hydraulics, 2021, 49(24): 119-123.
[4]. Dong Hao, Yang Jing, Li Shaobo, et al. Research Progress of Robot Motion Control Based on Deep Reinforcement Learning. Control and Decision Making, 2022, 37(2): 278-292.
[5]. Chen Huabin, Chen Shanben. Information Sensing and Control Methods in Welding Intelligent Manufacturing under Complex Scenarios. Acta Metallurgica Sinica, 2022, 58(4): 541-550.
[6]. Wang Yaonan, Jiang Yiming, Jiang Jiao, et al. Key Technologies of Robot Sensing and Control and Their Applications in Intelligent Manufacturing. Acta Automatica Sinica, 2023, 49(3): 494-513.
[7]. Wu Hao, Chen Shan, Feng Chi, et al. Terminal Visual Inspection Technology of Power Grid Inspection Robots. Power Equipment Management, 2020(9): 196-199.
[8]. Cheng Miaohai, Guo Tao, Xiang Mingming, et al. Path Planning Method of Intelligent Inspection Robots for Power Information Network Equipment Based on an Improved Ant Colony Algorithm. Automation & Instrumentation, 2023, 38(3): 40-43.
[9]. Shen Lei. Application of Intelligent Inspection Robots in the Operation and Maintenance Management of Substations. Modern Engineering Project Management, 2022, 1(3): 18-22.
[10]. Yang Xudong, Huang Yuzhu, Li Jigang, et al. Review of the Research Status of Substation Inspection Robots. Shandong Electric Power Technology, 2015, 42(1): 30-34.
[11]. Shen Xiang, Zhu Xiangying, Jin Naizheng. Design and Application of the Remote Monitoring System for Unattended Substations. Automation of Electric Power Systems, 2004, 28(2): 89-90.
[12]. Rao M Z, Liu K, Sheng Z X, et al. A novel filling strategy for robotic multi-layer and multi-pass welding based on point clouds for saddle-shaped weld seams. Journal of Manufacturing Processes, 2024, 121: 233−245.
[13]. Pinto J K C, Masuda M, Magrini L C, et al. Mobile robot for hotspot monitoring in electric power substation. Transmission and Distribution Conference and Exposition, 2008: 1-5.
[14]. Lu Sh, Feng L, Dong J. Design of control system for substation equipment inspection robot based on embedded Linux. Chinese Control and Decision Conference, 2008: 1709-1712.
[15]. Ren S, Song H, Jiang X. Path Planning of Robot for Substation Inspection Based on the Improved Prim Algorithm. Journal of Southwest Jiaotong University, 2011, 26(1): 61-63.
[16]. Xu Bo, Song Aiguo. Pan-tilt Servo Technology of Power Grid Inspection Robots Based on Improved Point Cloud Registration. Distribution & Utilization, 2023, 40(3): 95-101.
[17]. Global Data highly appraises 5G Flexhaul. Telecommunications Network Technology, 2017, (08): 83.
[18]. Yu Huan. Artificial intelligence will completely transform the energy industry. China Energy News, 2018-11-26(006).
Cite this article
Zhao,D. (2025). Advancements and Applications of Robotics Technology in Modern Manufacturing and Inspection Systems. Applied and Computational Engineering,148,26-32.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Ge Shirong, Zhu Hua. Current Situation and Development Trends of Rescue Robot Technology in Dangerous Environments. Coal Science and Technology, 2017, 45(5): 1-8.
[2]. Zhang Yi. Integration and Linkage Interaction Scheme of Multiple Systems for Coal Mine Safety Monitoring. Safety in Coal Mines, 2019, 50(6): 100-103.
[3]. Su Jian, Li Zaijuan. Design of the Sorting and Assembly Control System of Industrial Robots Integrating Vision and Ethernet Technologies. Machine Tool & Hydraulics, 2021, 49(24): 119-123.
[4]. Dong Hao, Yang Jing, Li Shaobo, et al. Research Progress of Robot Motion Control Based on Deep Reinforcement Learning. Control and Decision Making, 2022, 37(2): 278-292.
[5]. Chen Huabin, Chen Shanben. Information Sensing and Control Methods in Welding Intelligent Manufacturing under Complex Scenarios. Acta Metallurgica Sinica, 2022, 58(4): 541-550.
[6]. Wang Yaonan, Jiang Yiming, Jiang Jiao, et al. Key Technologies of Robot Sensing and Control and Their Applications in Intelligent Manufacturing. Acta Automatica Sinica, 2023, 49(3): 494-513.
[7]. Wu Hao, Chen Shan, Feng Chi, et al. Terminal Visual Inspection Technology of Power Grid Inspection Robots. Power Equipment Management, 2020(9): 196-199.
[8]. Cheng Miaohai, Guo Tao, Xiang Mingming, et al. Path Planning Method of Intelligent Inspection Robots for Power Information Network Equipment Based on an Improved Ant Colony Algorithm. Automation & Instrumentation, 2023, 38(3): 40-43.
[9]. Shen Lei. Application of Intelligent Inspection Robots in the Operation and Maintenance Management of Substations. Modern Engineering Project Management, 2022, 1(3): 18-22.
[10]. Yang Xudong, Huang Yuzhu, Li Jigang, et al. Review of the Research Status of Substation Inspection Robots. Shandong Electric Power Technology, 2015, 42(1): 30-34.
[11]. Shen Xiang, Zhu Xiangying, Jin Naizheng. Design and Application of the Remote Monitoring System for Unattended Substations. Automation of Electric Power Systems, 2004, 28(2): 89-90.
[12]. Rao M Z, Liu K, Sheng Z X, et al. A novel filling strategy for robotic multi-layer and multi-pass welding based on point clouds for saddle-shaped weld seams. Journal of Manufacturing Processes, 2024, 121: 233−245.
[13]. Pinto J K C, Masuda M, Magrini L C, et al. Mobile robot for hotspot monitoring in electric power substation. Transmission and Distribution Conference and Exposition, 2008: 1-5.
[14]. Lu Sh, Feng L, Dong J. Design of control system for substation equipment inspection robot based on embedded Linux. Chinese Control and Decision Conference, 2008: 1709-1712.
[15]. Ren S, Song H, Jiang X. Path Planning of Robot for Substation Inspection Based on the Improved Prim Algorithm. Journal of Southwest Jiaotong University, 2011, 26(1): 61-63.
[16]. Xu Bo, Song Aiguo. Pan-tilt Servo Technology of Power Grid Inspection Robots Based on Improved Point Cloud Registration. Distribution & Utilization, 2023, 40(3): 95-101.
[17]. Global Data highly appraises 5G Flexhaul. Telecommunications Network Technology, 2017, (08): 83.
[18]. Yu Huan. Artificial intelligence will completely transform the energy industry. China Energy News, 2018-11-26(006).