






1. Introduction
Soft robotics is emerging as a promising alternative to traditional rigid robots in agriculture due to its superior flexibility and adaptability [1]. As one of the world’s most important vegetable crops, the tomato plays a crucial role in global agricultural production. Harvesting is the most labor-intensive and time-intensive stage of the process from cultivation to distribution [2]. Increasing the efficiency and precision of tomato harvesting has become more critical with advances in innovative farming technologies and growing consumer demand for high-quality produce. As the end-effector directly interacting with tomato plants, the harvesting gripper is key in determining harvesting efficiency and fruit preservation. However, ripe tomatoes have delicate skins highly susceptible to mechanical damage. The natural variations in fruit size and shape also complicate the design of a universally effective gripper. The inherent characteristics of tomatoes render the requirements for its agricultural harvesting relatively demanding. Liu et al. designed a 3D-printed flexible finger gripper optimized through topology design, allowing it to grasp objects of various sizes and shapes [3]. However, its lack of adaptive force control can compromise the quality of harvested tomatoes. Similarly, Fujinaga et al. developed a suction-cutting device that detaches tomatoes using suction and cutting actions [4]. While this approach achieves a high success rate, it can leave scratches on the tomato skin, failing to meet commercial harvesting standards. These traditional rigid grippers often fail to fulfill the requirements due to poor adaptability, insufficient control accuracy, and a higher risk of fruit damage, as well as potential safety concerns in human-robot interaction, all of which hinder harvesting efficiency and reduce product quality. Furthermore, since tomatoes are food crops, the materials used in harvesting mechanisms must adhere to strict food safety standards. There is an urgent need for an adaptive, gentle, safe, and agricultural regulation-compliant robot to collaborate in the agricultural harvesting segment of tomatoes.
Therefore, this study designs a gripper with a bio-mimetic fin-ray structure based on the fin-ray of silicone using SolidWorks. Additionally, a closed-loop control system integrated with tactile sensing is developed to enhance adaptability during the harvesting processes. This novel end-effector aims to improve efficiency while minimizing damage to the fruit, thereby reducing dependence on agricultural labor and facilitates large-scale, sustainable production of tomatoes. The design may also serve as a reference for the automated harvesting of other delicate crops.
The silicone-based fin-ray manipulator designed in this study makes a significant contribution to tomato harvesting technology by overcoming the adaptability and safety limitations of traditional rigid grippers. While improving harvesting efficiency and quality, its adaptive control system theoretically advances the intelligence of the harvesting process. In addition, this study highlights the potential of bionic machinery for wider applications in agricultural automation.
2. Literature review
In recent years, researchers have made significant efforts to improve the efficiency and quality of tomato harvesting robots, particularly in end-effector design, sensory capabilities, and intelligent control. In terms of enhancing harvesting stability, Liu et al. developed a topology-optimized 3D-printed flexible gripper, which utilizes flexible sensors to provide real-time feedback on the gripping status, enabling adaptive grasping of fruits of various sizes and reducing the risk of fruit damage [3]. Kultongkham et al. proposed a three-finger soft gripper, which uses pressure feedback to adjust the gripping force in real-time, thereby improving the robot's adaptability and stability when handling tomatoes of unknown sizes [5]. Liu et al. further advanced this concept by developing a hybrid force/position control three-finger end-effector, which achieves fine control and non-destructive harvesting of tomatoes [6]. Additionally, an et al. designed an adaptive soft gripper combining Fin-ray bio-inspired fins with a linkage mechanism, thereby improving force uniformity and gripping stability [7]. In order to achieve higher harvesting quality, Fujinaga et al. designed an end-effector based on suction and cutting, using a combination of fans and blades for tomato harvesting. This effectively avoids fruit damage during harvesting, while greenhouse experiments showed a high success rate of 85% [4]. In terms of automation innovations, Jun et al. developed a tomato harvesting robot that integrates 3D vision sensing technology with deep learning-based object detection algorithms, enabling precise robotic arm control and automating the harvesting process [8]. These studies have provided crucial technological support for developing tomato harvesting robots. However, there is still potential for further refinement in terms of adaptability to complex environments, harvesting stability, and practical usability.
3. Methodology
3.1. Related work
The research in this paper is divided into four main parts as shown in Figure 1, starting with the reproduction of ideas based on fin-ray structure and related literature to satisfy the needs involved in the fin-ray soft grippers. The process begins with the design of the gripper, whereby the design is created and modelled using SolidWorks after confirming the relevant data and structure. Next, selecting gripper materials involves identifying silicone as the primary material due to its flexibility and suitability for delicate object handling. Subsequently, a control block diagram is added to the designed gripper, aiming to enable intelligent grasping with integrated tactile sensors to enhance adaptability and precision in tomato harvesting. Finally, the simulation modeling phase is conducted using SolidWorks Simulation, where the gripper's mechanical performance is analyzed to ensure its effectiveness in real-world applications.
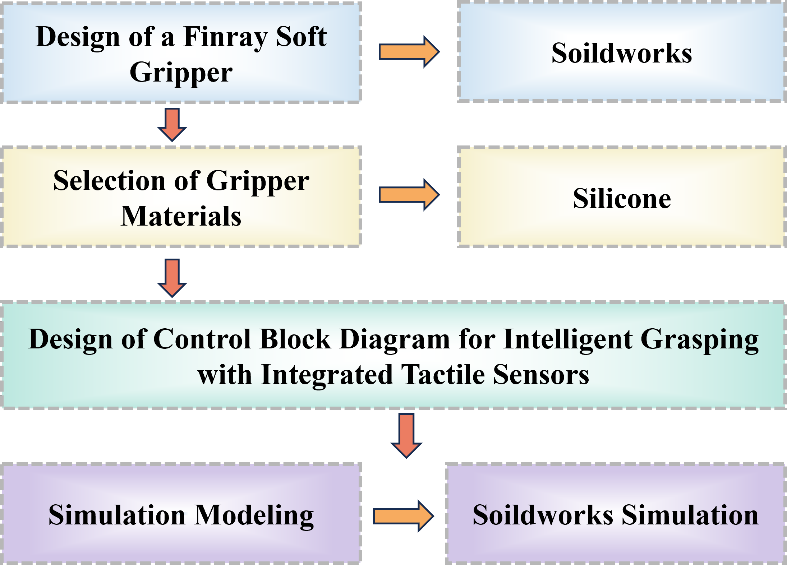
Figure 1: The overall framework of the gripper
3.1.1. Design of the soft gripper
Tomatoes are delicate and easily bruised, and they vary significantly in size and shape. These characteristics pose substantial challenges for traditional rigid or low-adaptability grippers, which often struggle to achieve gentle yet secure grasping, thereby hindering harvesting efficiency. Therefore, a gripper design that adapts to irregular geometries while minimizing mechanical stress is essential for effective and non-destructive tomato harvesting.
The fin-ray structure is a bioinspired design derived from the internal skeletal architecture of fish fins. It consists of two flexible sidewalls connected by a series of angled crossbeams in a V-shaped configuration. When an external force is applied to the fingertip, the beams on the opposite side are stretched while those on the same side are compressed, producing asymmetric deformation. This results in the structure bending toward the direction of the applied force, which is a counter-intuitive but highly adaptive behavior facilitating passive shape formation. According to Elgeneidy et al., the fin-ray finger passively adapts to object geometries under unstructured contact conditions with high compliance [9]. Due to this self-adaptive deformation mechanism, fin-ray structures have been widely applied in soft robotic end-effectors for grasping delicate or irregularly shaped objects, such as fruits, soft packages, and biomedical instruments, where conformal contact and damage-free handling are essential. Based on this principle, this study incorporates a bio-inspired fin-ray structure into the gripper design. This allows the gripper to naturally conform to the curved surface of the tomato when force is applied and quickly return to its initial shape when released.
The gripper design consists of two flexible units, each incorporating a bioinspired fin-ray structure with curved claw profiles and segmented ribbed geometry for enhanced compliance, which is informed by Chen et al.’s exploration of biomimetic fish fin mechanisms [10]. This configuration enables the gripper to conform to the irregular surface of a tomato with minimal force, as illustrated in Figure 2(a). The design parameters of device include a tapered profile and two distinct curvature profiles, which facilitate envelope gripping and improve stability by increasing the contact area while evenly distributing the stress to address the requirement of minimizing the risk of fruit damage (Figure 2b),. Actuated by a motor-driven rotating disc, the gripper adjusts its opening and closing range while an additional motor at the connection point regulates tension and relaxation. During operation, the fin-ray structure undergoes coordinated lateral and longitudinal deformation, providing passive adaptability to accommodate fruit size and shape variations without relying on complex active control systems. By adapting these design principles, this approach proposes a novel structure and dimension that optimizes compliance and reduces mechanical stress, achieving an effective balance between flexibility and structural integrity for efficient, damage-free tomato harvesting.
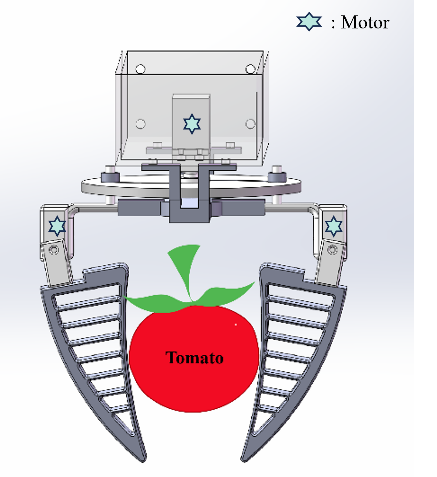
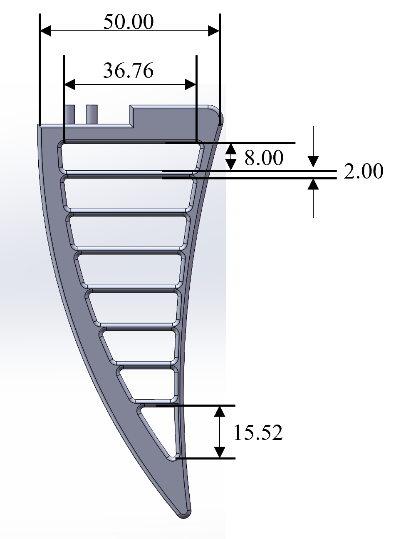
(a) (b)
Figure 2: Gripper design drawing. (a) Gripping schematic diagram; (b) 3D model of the gripper
3.1.2. Selection of material
In recent years, silicone has garnered widespread attention in robotic grasping as a new high-performance material. The choice of material directly affects the performance and safety of soft robotics in agricultural applications, particularly in harvesting delicate crops. Meenakshipriya et al. demonstrated through ANSYS simulation and experimental validation that silicone exhibits uniform stress distribution, excellent flexibility, and structural stability, making it well-suited for robotic grippers [11].
In agricultural production, a gripper material must have good mechanical properties to ensure the reliable grasping of crops without causing damage. High compression resilience is also crucial, allowing the gripper to adapt to different fruit sizes and shapes while maintaining a secure grip. Temperature stability is also essential, as agricultural environments often involve exposure to varying weather conditions, ensuring the material maintains consistent performance in different climates. The silicone material is applied to the two claw structures of the gripper’s end effector, allowing it to rapidly reset after releasing harvested tomatoes, thereby improving operational efficiency.
3.1.3. Design of closed-loop pressure control block diagram
To achieve stable and non-destructive grasping of tomatoes, this design integrates tactile sensors in the gripping section of the gripper and constructs a closed-loop control system, as shown in Figure 3. Traditional methods relying solely on pressure sensors are often inadequate to accurately determine the contact state between the gripper and the tomato. Insufficient gripping force can cause slippage of the gripper to preclude picking, while excessive gripping force can damage the tomato. Therefore, this design refers to the optical tactile sensor based on photoelastic materials proposed by Barreiros et al. to address this issue [12].
This sensor consists of a stretchable optical waveguide that can encode the mechanical deformations (including regular and shear forces) generated when the gripper makes contact with the fruit into light-intensity signals quickly read and processed by an image sensor. Compared to traditional pressure sensors, this sensor can accurately sense the gripping force and contact position, allowing for precise identification of the gripping state. This enables real-time adjustments to the grasping force to prevent slippage caused by insufficient force or damage due to excessive force, ultimately improving the flexibility and safety of the fruit harvesting process.
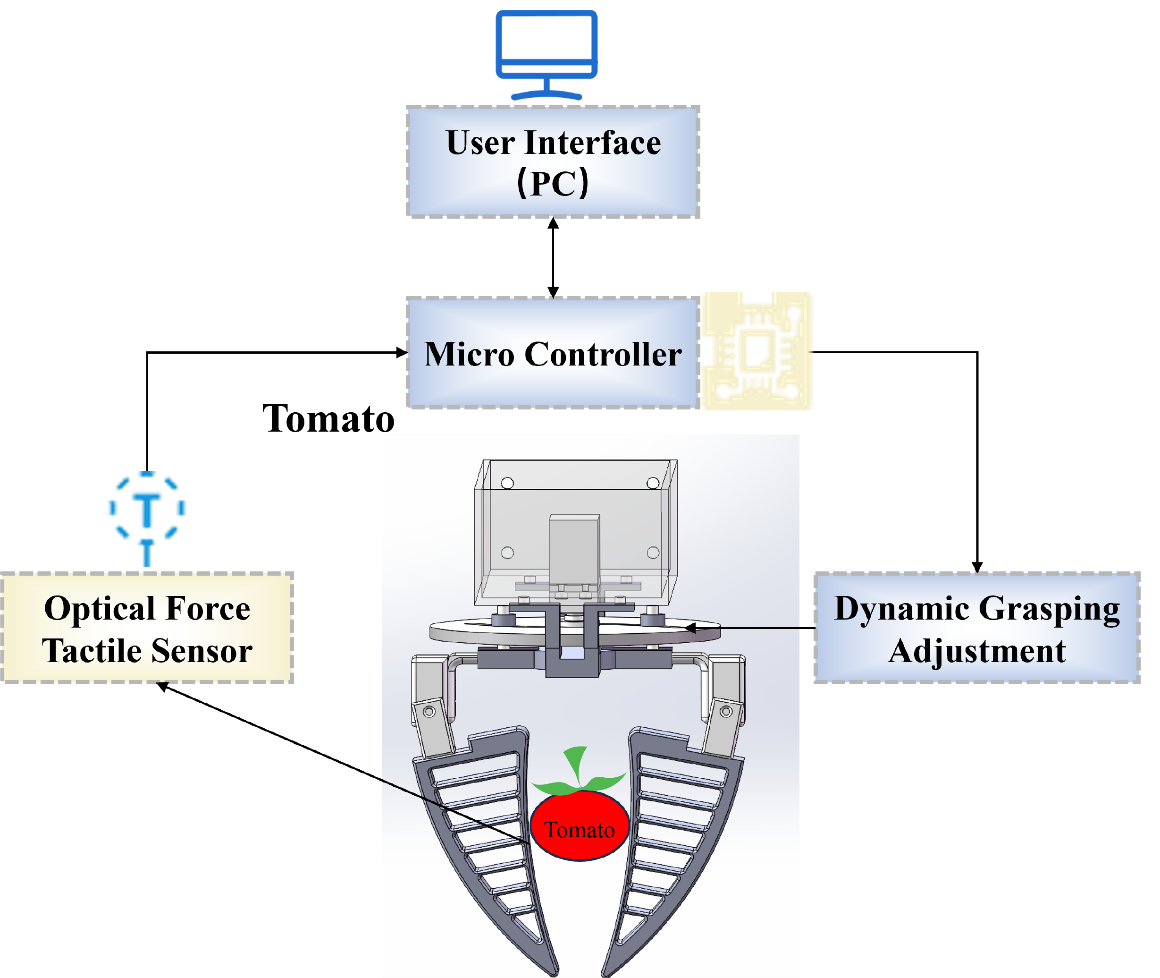
Figure 3: Block diagram of the tomato harvesting system design
3.2. Experiment
To evaluate the gripping performance of the designed gripper, a simulation analysis of stress, displacement, and strain was conducted using the built-in simulation tools in SolidWorks. These analyses are essential for assessing the gripper's mechanical behavior under load, ensuring that it can deform appropriately without structural failure and, more importantly, without damaging the tomato during operation. Static analysis was chosen for this research because the gripping motion is relatively slow and does not involve rapid or dynamic changes. Thus, static simulation is sufficient to access the deformation and force distribution under steady loading conditions.
According to Malyshev et al., tomato harvesting grippers are required to function within a force range of 1–30 N [13]. Therefore, a 30 N load was selected for the static analysis to represent the upper limit of expected gripping force. Using a load lower than this value might underestimate the actual mechanical demands, potentially leading to a non-conservative design. In contrast, applying a significantly higher load could result in exaggerated stress and strain values that do not reflect realistic working conditions and may cause unnecessary damage to the tomato.
Since only the claw structures of the gripper directly contact the tomato and are the primary components that deform during gripping, and considering the symmetrical nature of the gripping force, the simulation was conducted on a single claw.
3.3. Result
Figure 4 presents the simulation results of the static analysis for the gripper, demonstrating its mechanical performance. The stress analysis in Figure 4(a) shows that the stress is mainly concentrated around the structural ribs and the fixed end, while the free end experiences lower stress. The stress distribution remains relatively uniform, as indicated by the gradient from blue (low stress) to green and yellow (moderate stress), with no regions exceeding the yield strength. This reduces the risk of fracture or failure due to localized excessive stress.
The displacement analysis in Figure 4(b) indicates that displacement is primarily concentrated at the free end, as represented by the red and yellow regions, while the fixed end remains nearly stationary (blue). This distribution reveals the gripper’s ability to undergo adaptive deformation under varying loads, thus enhancing its adaptability to various tomato sizes.
The strain analysis in Figure 4(c) highlights that strain is distributed predominantly along the structural ribs and edges, transitioning from blue (low strain) to green and yellow (higher strain), indicating that these areas experience the most deformation. This demonstrates that the gripper can maintain structural integrity while deforming with a certain level of flexibility.
The simulation results confirm that the designed gripper possesses favorable mechanical properties, indicating its potential applicability in tomato harvesting tasks.
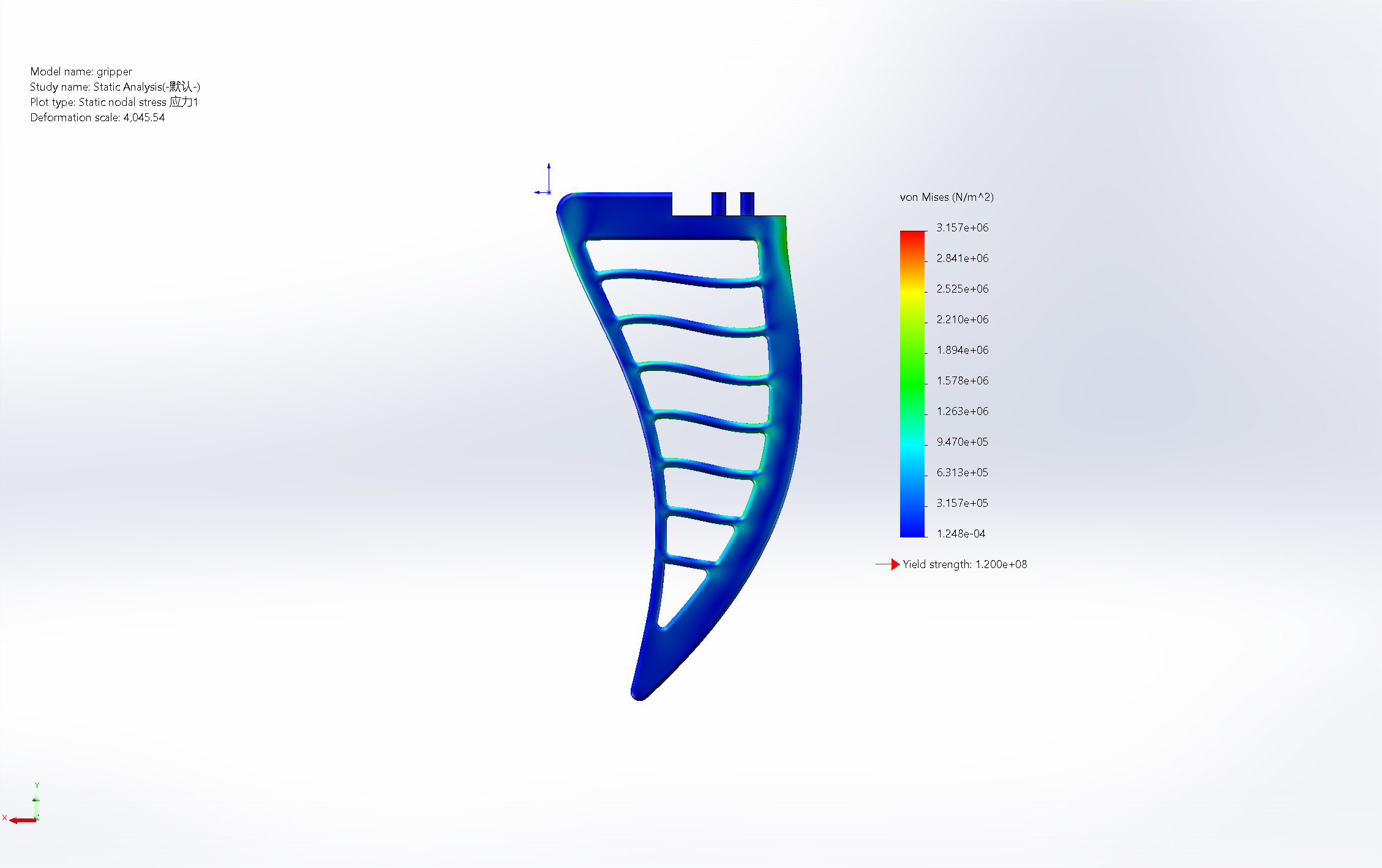
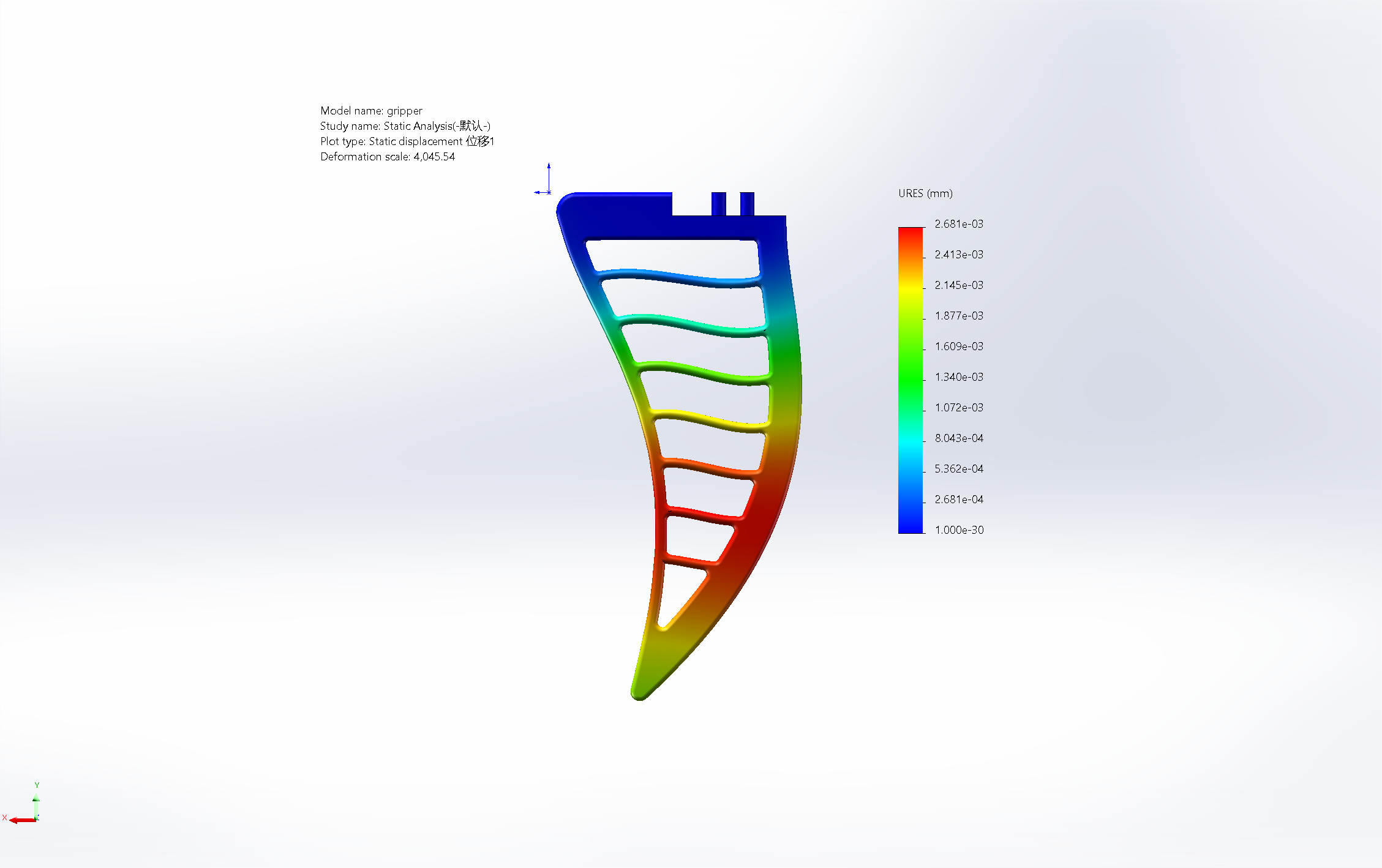
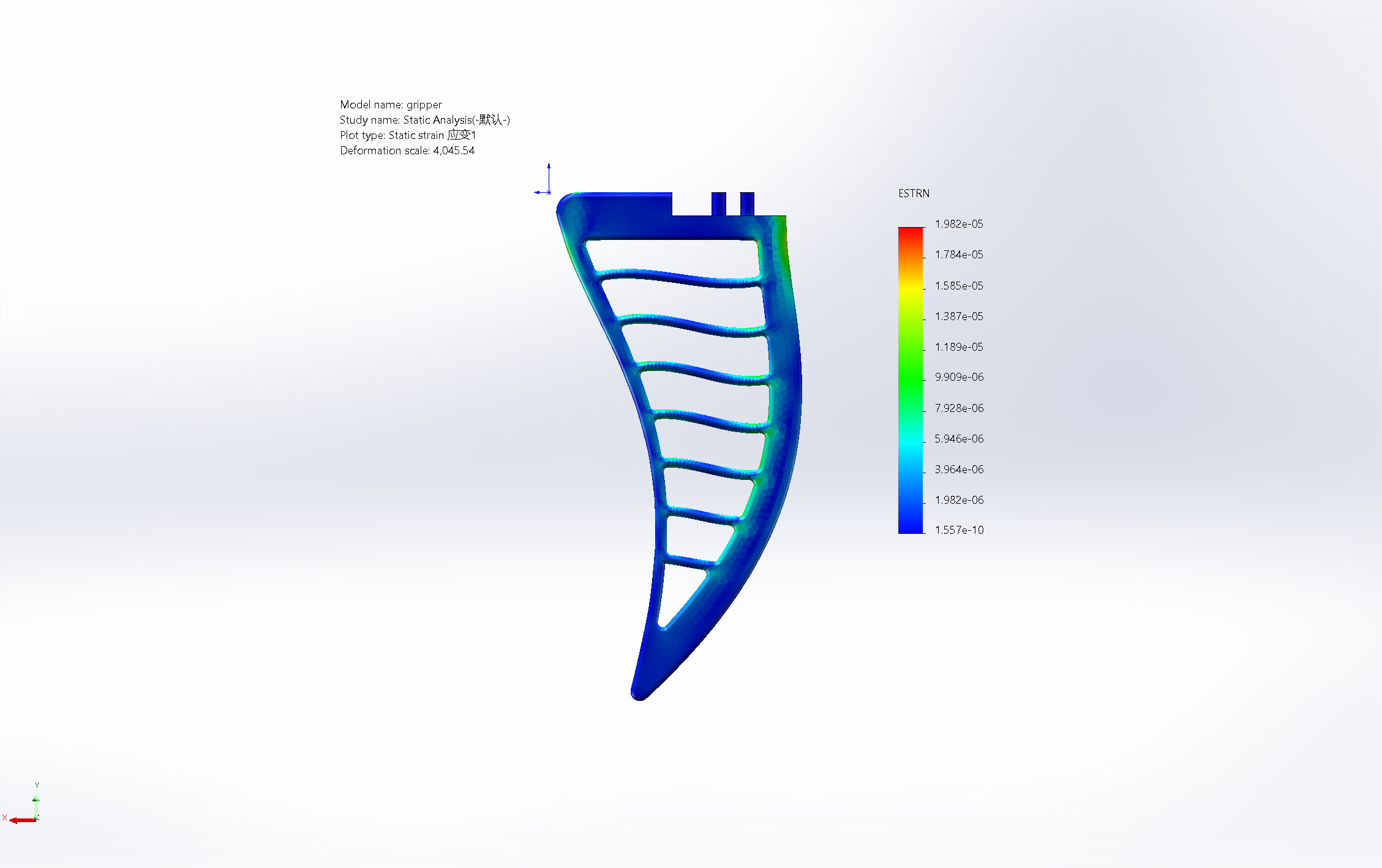
Figure 4: Static analysis of the gripper. (a) Stress analysis. (b) Displacement analysis. (c) Strain analysis
4. Conclusion
This study presents the design and analysis of a silicone-based fin-ray soft gripper that addresses the limitations of conventional rigid grippers in tomato harvesting, particularly in terms of adaptability, fruit protection, and operational safety. Through static simulation, the gripper demonstrated favorable mechanical performance, including compliant deformation, uniform stress distribution, and effective buffering capacity, thereby validating its potential to grasp tomatoes securely while minimizing mechanical damage. In addition, a control system architecture was proposed to support the integration of the gripper into intelligent harvesting platforms. The proposed design not only offers a viable end-effector solution for tomato harvesting robots but also provides a foundation for future developments in soft robotic systems tailored to the handling of delicate horticultural produce.
Despite these preliminary results, the study has certain limitations. The performance of the tactile sensor has not been verified in complex field conditions (such as high humidity and dusty environments), which may affect its sensitivity and reliability. Furthermore, the gripper design primarily targets single-fruit grasping, which may be inadequate for densely growing or low-hanging tomatoes, potentially lacking sufficient gripping range and stability. Lastly, this study is limited to the simulation stage, with no experimental data available to accurately support it.
Future research will conduct actual harvesting experiments with the designed gripper to test the performance of the gripper with integrated tactile sensors in various harvesting environments, and verify its efficiency and stability based on the collected experimental data. In addition, the environmental adaptability of the tactile sensor by integrating visual perception technology, so as to build a multimodal sensing system that can respond to complex field conditions.
References
[1]. AboZaid, Y. A., Aboelrayat, M. T., Fahim, I. S., & Radwan, A. G. (2024). Soft robotic grippers: A review on technologies, materials, and applications. Sensors and Actuators A: Physical, 115380.
[2]. Wang, T., Du, W., Zeng, L., Su, L., Zhao, Y., Gu, F., & Chi, Q. (2023). Design and testing of an end-effector for tomato picking. Agronomy, 13(3), 947.
[3]. Liu, C. H., Hsu, M. C., Chen, Y., Chen, W. T., & Chen, T. L. (2019, July). A topology-optimized 3D printed compliant finger with flex sensor for adaptive grasping of unknown objects. In 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) (pp. 92-97). IEEE.
[4]. Fujinaga, T., Yasukawa, S., & Ishii, K. (2021, January). Development and evaluation of a tomato fruit suction cutting device. In 2021 IEEE/SICE International Symposium on System Integration (SII) (pp. 628-633). IEEE.
[5]. Kultongkham, A., Kumnon, S., Thintawornkul, T., & Chanthasopeephan, T. (2021). The design of a force feedback soft gripper for tomato harvesting. Journal of Agricultural Engineering, 52(1).
[6]. Liu, W., Tan, Z., & Xie, W. (2025). A hand-like gripper embedded with flexible gel sensor for tomato harvesting: soft contact and intelligent ripeness sensing. Journal of Food Measurement and Characterization, 1-12.
[7]. An, B., Choi, T., & Kim, U. (2025). Linkage integrated fin ray gripper capable of safe adaptive grasping for tomato harvesting. Computers and Electronics in Agriculture, 232, 110118.
[8]. Jun, J., Kim, J., Seol, J., Kim, J., & Son, H. I. (2021). Towards an efficient tomato harvesting robot: 3d perception, manipulation, and end-effector. IEEE access, 9, 17631-17640.
[9]. Elgeneidy, K., Fansa, A., Hussain, I., & Goher, K. (2020, May). Structural optimization of adaptive soft fin ray fingers with variable stiffening capability. In 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft) (pp. 779-784). IEEE.
[10]. Chen, R., Song, R., Zhang, Z., Bai, L., Liu, F., Jiang, P., Sindersberger, D., Monkman, G.J. & Guo, J. (2019). Bio-inspired shape-adaptive soft robotic grippers augmented with electroadhesion functionality. Soft robotics, 6(6), 701-712.
[11]. Meenakshipriya, B., Suhas, R. M., Shivashankaran, D., Kumar, M. D., Raswin, K. T., Manoj, V., & Dharanish, P. K. (2024, June). Design And Analysis Of Soft Robotic Gripper With Different Materials For Object Handling. In 2024 15th International Conference on Computing Communication and Networking Technologies (ICCCNT) (pp. 1-8). IEEE.
[12]. Meenakshipriya, B., Suhas, R. M., Shivashankaran, D., Kumar, M. D., Raswin, K. T., Manoj, V., & Dharanish, P. K. (2024, June). Design And Analysis Of Soft Robotic Gripper With Different Materials For Object Handling. In 2024 15th International Conference on Computing Communication and Networking Technologies (ICCCNT) (pp. 1-8). IEEE.
[13]. Malyshev, D., Filice, L., Mirabelli, G., Longo, F., Bernardi, B., Carbone, G., & Rybak, L. (2024, May). A Literature Review and Design Considerations Towards a Gripper for Tomato Harvesting. In International Conference on Robotics in Alpe-Adria Danube Region (pp. 553-563). Cham: Springer Nature Switzerland.
Cite this article
Hu,J. (2025). Design and Performance Analysis of a Silicone-Based Fin-ray Soft Gripper for Intelligent Tomato Harvesting. Applied and Computational Engineering,153,9-15.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. AboZaid, Y. A., Aboelrayat, M. T., Fahim, I. S., & Radwan, A. G. (2024). Soft robotic grippers: A review on technologies, materials, and applications. Sensors and Actuators A: Physical, 115380.
[2]. Wang, T., Du, W., Zeng, L., Su, L., Zhao, Y., Gu, F., & Chi, Q. (2023). Design and testing of an end-effector for tomato picking. Agronomy, 13(3), 947.
[3]. Liu, C. H., Hsu, M. C., Chen, Y., Chen, W. T., & Chen, T. L. (2019, July). A topology-optimized 3D printed compliant finger with flex sensor for adaptive grasping of unknown objects. In 2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM) (pp. 92-97). IEEE.
[4]. Fujinaga, T., Yasukawa, S., & Ishii, K. (2021, January). Development and evaluation of a tomato fruit suction cutting device. In 2021 IEEE/SICE International Symposium on System Integration (SII) (pp. 628-633). IEEE.
[5]. Kultongkham, A., Kumnon, S., Thintawornkul, T., & Chanthasopeephan, T. (2021). The design of a force feedback soft gripper for tomato harvesting. Journal of Agricultural Engineering, 52(1).
[6]. Liu, W., Tan, Z., & Xie, W. (2025). A hand-like gripper embedded with flexible gel sensor for tomato harvesting: soft contact and intelligent ripeness sensing. Journal of Food Measurement and Characterization, 1-12.
[7]. An, B., Choi, T., & Kim, U. (2025). Linkage integrated fin ray gripper capable of safe adaptive grasping for tomato harvesting. Computers and Electronics in Agriculture, 232, 110118.
[8]. Jun, J., Kim, J., Seol, J., Kim, J., & Son, H. I. (2021). Towards an efficient tomato harvesting robot: 3d perception, manipulation, and end-effector. IEEE access, 9, 17631-17640.
[9]. Elgeneidy, K., Fansa, A., Hussain, I., & Goher, K. (2020, May). Structural optimization of adaptive soft fin ray fingers with variable stiffening capability. In 2020 3rd IEEE International Conference on Soft Robotics (RoboSoft) (pp. 779-784). IEEE.
[10]. Chen, R., Song, R., Zhang, Z., Bai, L., Liu, F., Jiang, P., Sindersberger, D., Monkman, G.J. & Guo, J. (2019). Bio-inspired shape-adaptive soft robotic grippers augmented with electroadhesion functionality. Soft robotics, 6(6), 701-712.
[11]. Meenakshipriya, B., Suhas, R. M., Shivashankaran, D., Kumar, M. D., Raswin, K. T., Manoj, V., & Dharanish, P. K. (2024, June). Design And Analysis Of Soft Robotic Gripper With Different Materials For Object Handling. In 2024 15th International Conference on Computing Communication and Networking Technologies (ICCCNT) (pp. 1-8). IEEE.
[12]. Meenakshipriya, B., Suhas, R. M., Shivashankaran, D., Kumar, M. D., Raswin, K. T., Manoj, V., & Dharanish, P. K. (2024, June). Design And Analysis Of Soft Robotic Gripper With Different Materials For Object Handling. In 2024 15th International Conference on Computing Communication and Networking Technologies (ICCCNT) (pp. 1-8). IEEE.
[13]. Malyshev, D., Filice, L., Mirabelli, G., Longo, F., Bernardi, B., Carbone, G., & Rybak, L. (2024, May). A Literature Review and Design Considerations Towards a Gripper for Tomato Harvesting. In International Conference on Robotics in Alpe-Adria Danube Region (pp. 553-563). Cham: Springer Nature Switzerland.