







1. Introduction
A drone is a kind of aerial vehicle that does not require a human to drive in the cockpit, and can be remotely controlled by wireless communication or automatically controlled by a set controller. They do not require human beings to operate on the ground, so they are suitable for using in various complex and dangerous environments. At present, the most common UAV is the rotary-wing UAV, which can take off and land vertically, has strong endurance, large carrying capacity, low cost, strong wind resistance and can be used in narrow spaces.
As for the rotary-wing UAV’s flight, motors on each axis of the drone rotate the rotors to generate upward lift. The rotation speed of the motor can be controlled to change the thrust of each axis, and then control the track of the UAV. For an even-numbered rotor UAV, The motors on each axis are placed symmetrically. It nicely removes the internal torque due to rotation.[1] In the meantime, increasing the number of rotors will lead to the increase of control difficulty of the UAV.
The quad-rotor UAV has a simple structure, so it is of great research value.The most common external interference of quad-rotor UAVs in flight or hovering state is the influence of wind. The research on the anti-wind disturbance of the quad-rotor UAV can improve its stability and wind resistance , and make the aircraft better adapt to complex and changeable operating environment. [2]
This research will use the quad-rotor UAV as the platform to study its kinematics model in the wind field, to explore the suitability of the quad-rotor UAV’s controller, and then come up with ideas for further optimization of the flight control.
2. Literature review
In the existing literature, common UAV flight control algorithms include PID, PD, LQ, backstepping control, sliding mode variable structure, etc.
Stanford University's STARMAC project is a project developed by Stanford University in order to break the limitations of the current quad-rotor UAV's bulky and complex structure. An agent control test platform that can test and validate multi-machine algorithms and control strategies, including multiple trajectories capable of using GPS and IMU sensors Tracked quad-rotors [3]. Based on the test bed of Stanford University, since the dynamics model of the UAV is nonlinear, the model is firstly linearized, and then the attitude controller is designed with the LQR controlling approach [4], and the sliding mode controlling approach [5] using for designing the height controller is adopted. It has achieved good control effect.
A small quad-rotor aircraft developed by the EPFL Automation System Laboratory of the Swiss Federal Institute of Technology, the OS4 quad-rotor UAV [6]. The team mainly researched the flight controlling algorithm of quad-rotor UAV. Their goal is to design and develop a quad-rotor UAV system that can fly autonomously indoors and outdoors. At present, the agency has developed a control algorithm called Integral Backstepping [7], which combines the advantages of PD algorithm and Backstepping algorithm, and has successfully realized the hovering, take-off and landing.
3. Dynamics and kinematics mathematical model of UAV
The analysis of the UAV from the perspective of dynamics and kinematics can establish a complete coordinate system. Roll angle, pitch angle, and yaw angle are all used to describe the angle between the inertial coordinate system and the body coordinate system. The conditions they need to meet: φ(-π/2, π/2), θ(-π/2, π/2), and ψ(-π/2, π/2). The relationship between the two systems of the aircraft itself is obtained by the cubic transformation of Euler angles. The UAV adopts the following mathematical model [8], and the parameters of the quad-rotor UAV are shown in table 1.
\( \begin{cases}\begin{matrix}\ddot{x}=-\frac{{U_{1}}}{m}(cosψsinθcosϕ+sinψsinϕ) \\ \ddot{y}=-\frac{{U_{1}}}{m}(sinψsinθcosϕ-cosψsinϕ) \\ \ddot{z}=g-\frac{{U_{1}}}{m}cosϕcosθ \\ \ddot{ϕ}=\frac{1}{{I_{xx}}}[{U_{2}}+qr({I_{yy}}-{I_{zz}})-JqΩ] \\ \ddot{θ}=\frac{1}{{I_{yy}}}[{U_{3}}+pr({I_{zz}}-{I_{xx}})+JpΩ] \\ \ddot{ψ}=\frac{1}{{I_{zz}}}[{U_{4}}+pq({I_{xx}}-{I_{yy}})] \\ \end{matrix}\end{cases} \)
Table 1. Parameters of the UAV.
m(kg) | g | Ixx | Iyy | Izz | K | b | d(m) |
1.02 | 9.8 | 0.0187 | 0.0164 | 0.0297 | 0.81 | 0.35 | 0.3 |
4. Establishment of wind field model
In the actual flight, the UAV is inevitable to undergo various complex interferences. Wind is one of the disturbances that have the greatest impact on the attitude change of the fuselage of the quad-rotor UAV when it performs tasks. The natural wind can be divided into four types: continuous wind, gust wind, gradual wind and random wind. The type of wind field used in this essay is random wind. The speed of random wind can be expressed as: Vm = Vmax Ran( -1, 1) sin( 2πt + ωn). In the formula, Vmax is the maximum random wind speed. Ran( -1, 1) is a random value equably scattered between -1 and 1. The value of ωn is π/6. [9]
5. Controllers of the quad-rotor UAV
5.1. Classical PID controller
The classic PID controller has been the most widely used in industrial control for its distinct structure, easy design, reliable and stable operation, and wide adaptability. The principle of PID control is to operate according to the relationship of proportional, integral and differential according to the input, so that it can eliminate the deviation and finally realize the stable operation of the system.
5.2. Cascade PID controller
The cascade PID controller greatly promotes the effect of control in process controlling. There are two controllers working in series forming the cascade control system. The outcome of the outer controller is regarded as the set point of the internal controller, and the outcome of the internal controller can control the targeted valve.
5.3. Fuzzy PID controller
In actual control, the system is not time-invariant, and it is usually necessary to dynamically adapt the parameters of the PID. Fuzzy control can just fulfill this requirement. Fuzzy PID controller integrates fuzzy algorithm with self-tuning of PID control parameters.[10] It adopts the Mamdani-type fuzzy inference method and uses the center of gravity method for defuzzification.
6. Result analysis
A step signal is added to the simulation system to generate a step response at time zero. The initial value of the step signal is 0, and the result value of the step signal is 1. Under the condition of no wind disturbance, the control effects of the three controllers on the z-axis variation, pitch angle, roll angle and yaw angle of the UAV are shown from figure 1 to figure 4.
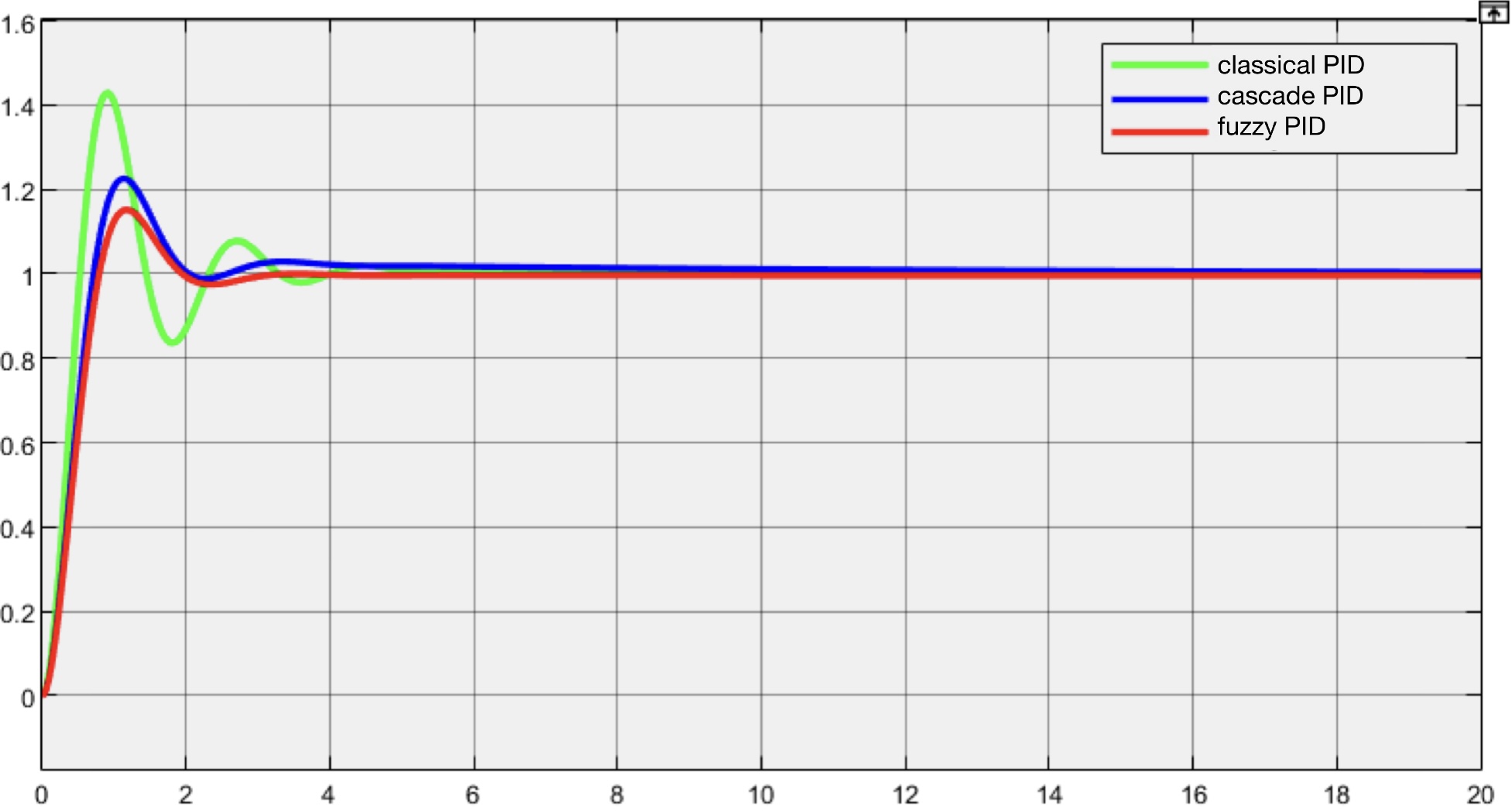
Figure 1. Controlling results of the three controllers of the z-axis variation (no wind disturbance).
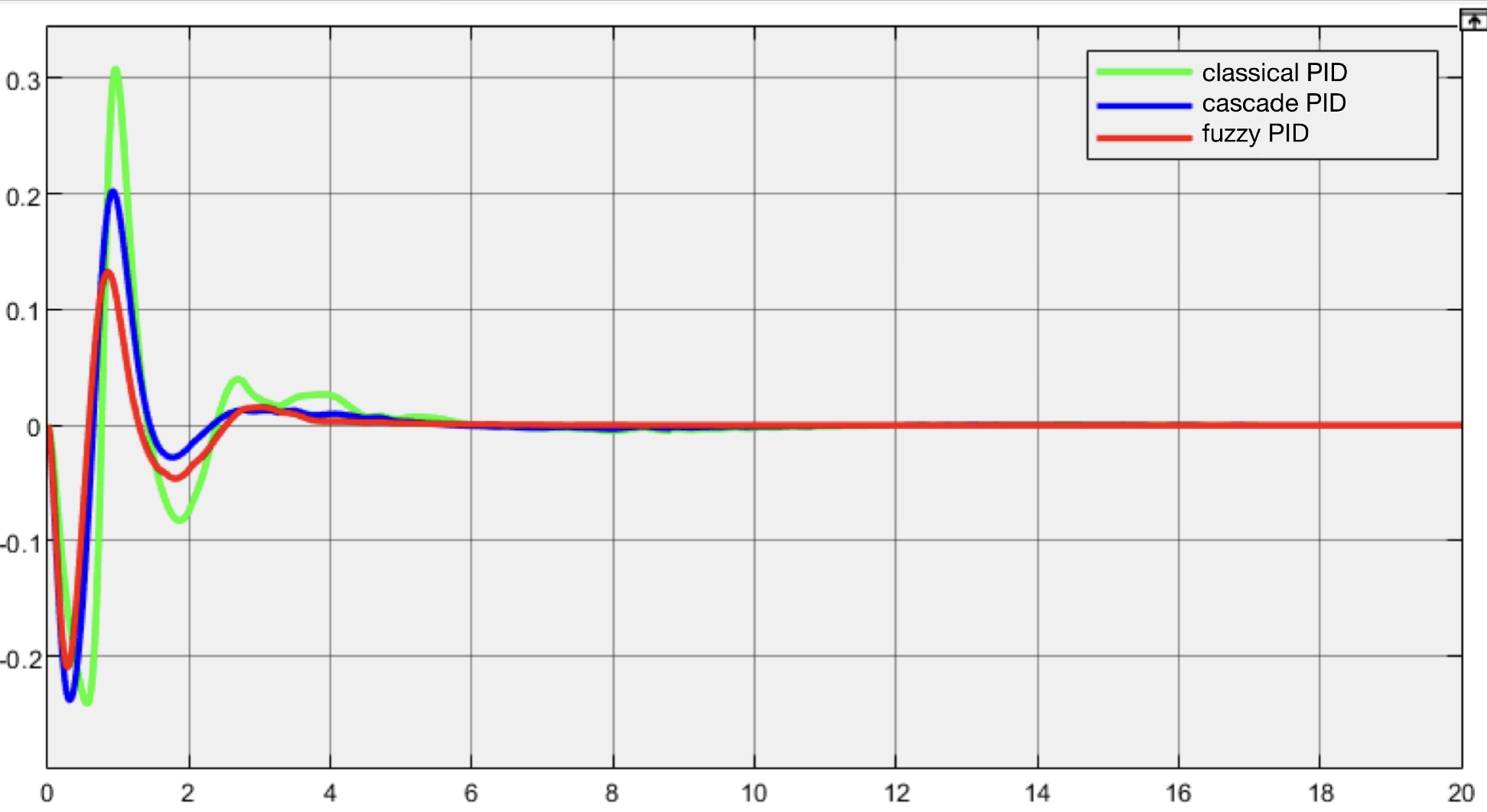
Figure 2. Controlling results of the three controllers of the pitch angle (no wind disturbance).
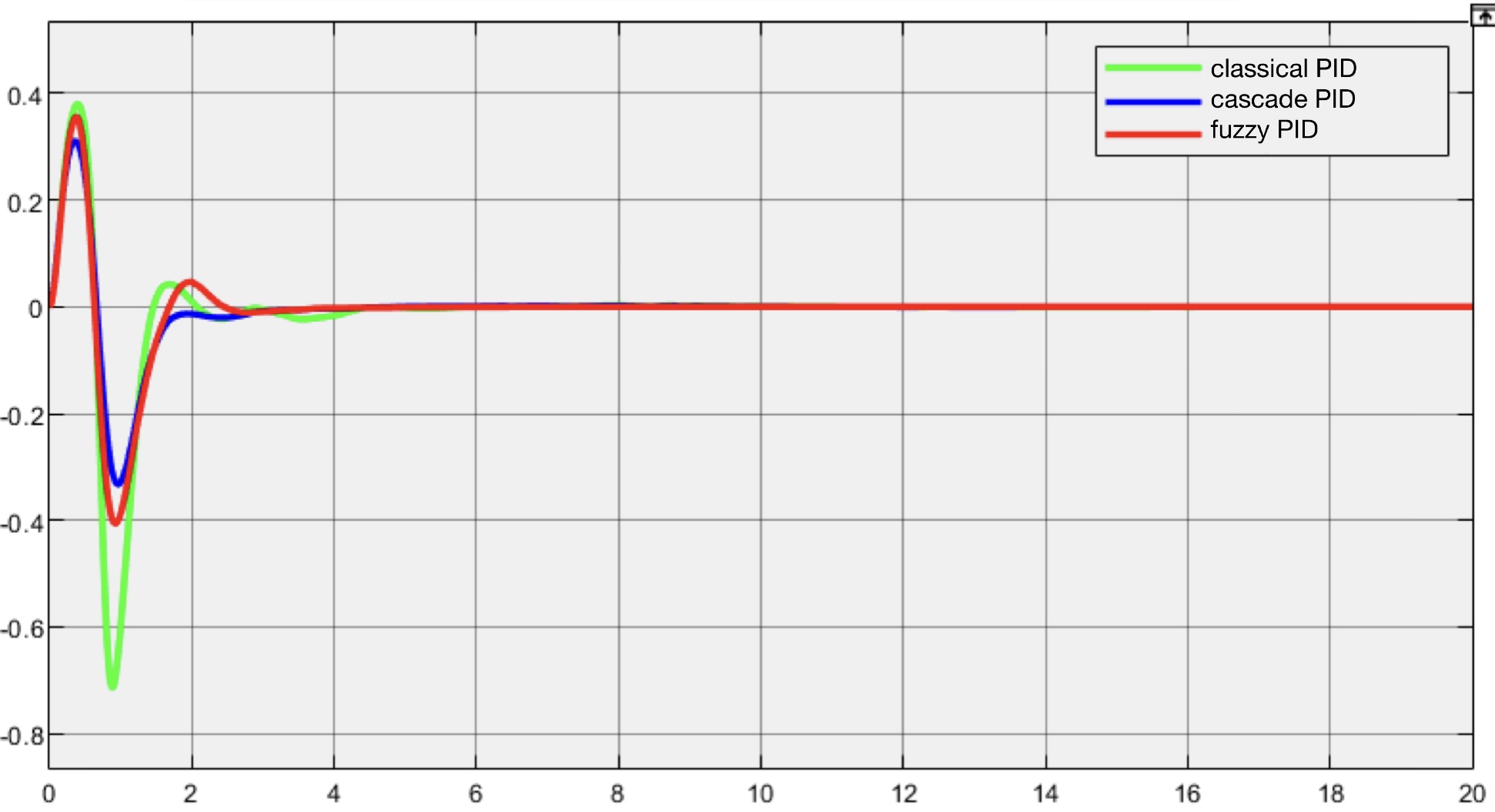
Figure 3. Controlling results of the three controllers of the roll angle (no wind disturbance).
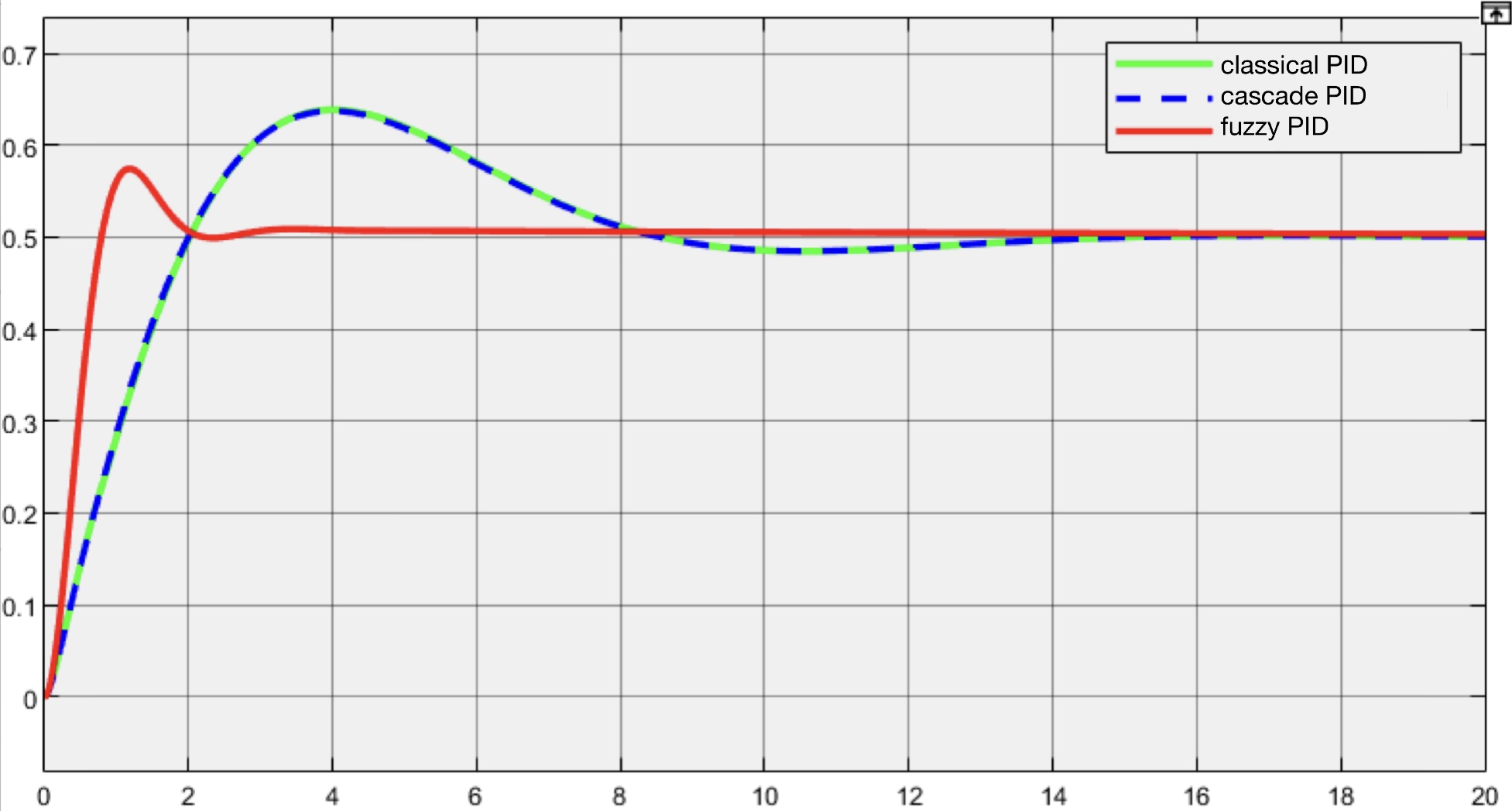
Figure 4. Controlling results of the three controllers of the yaw angle (no wind disturbance).
Under the condition of wind disturbance, the control effects of the three controllers on the z-axis variation, pitch angle, roll angle and yaw angle of the quad-rotor UAV are shown from figure 5 to figure 8.
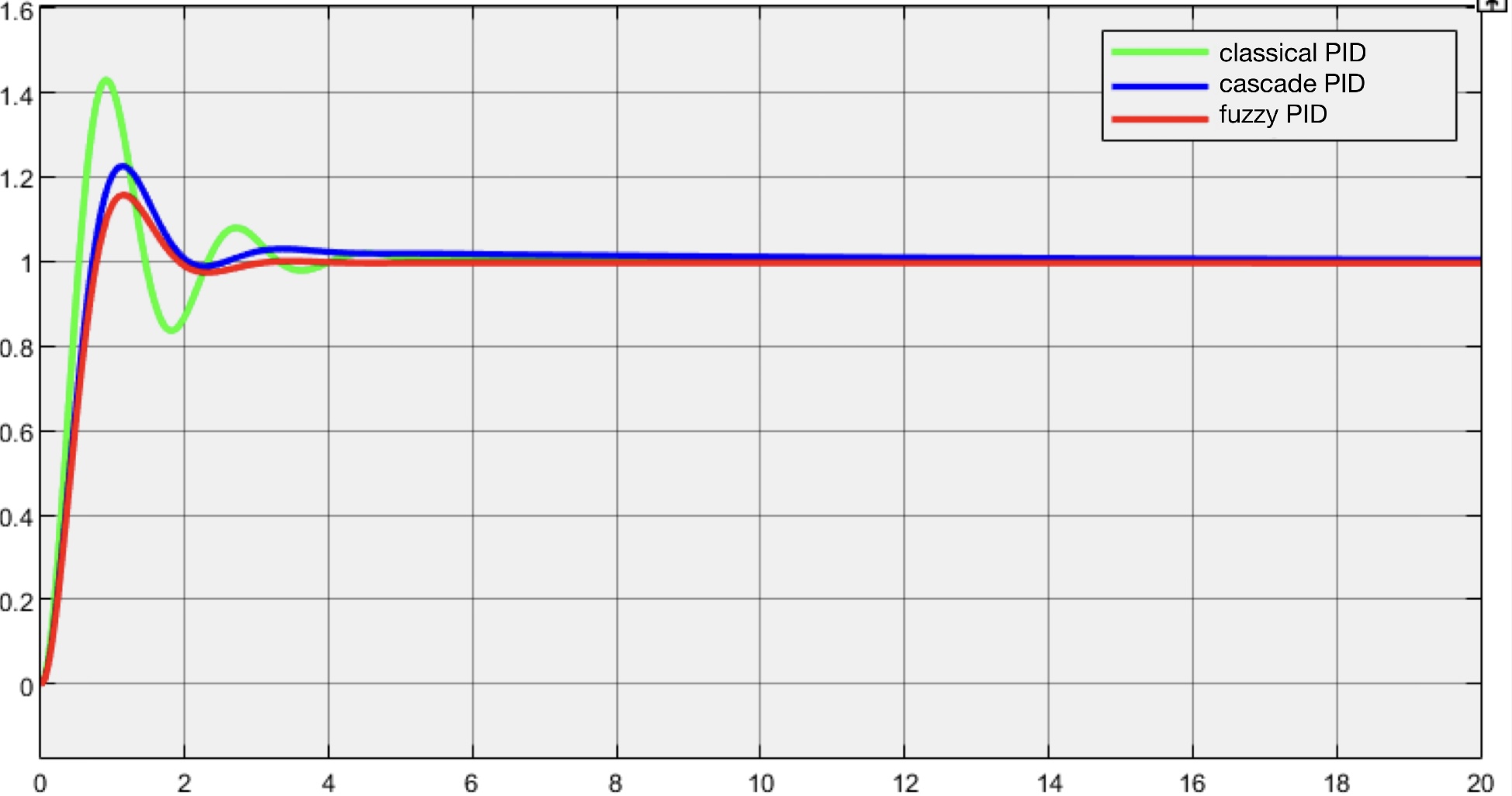
Figure 5. Controlling results of the three controllers of the z-axis variation (wind disturbance).
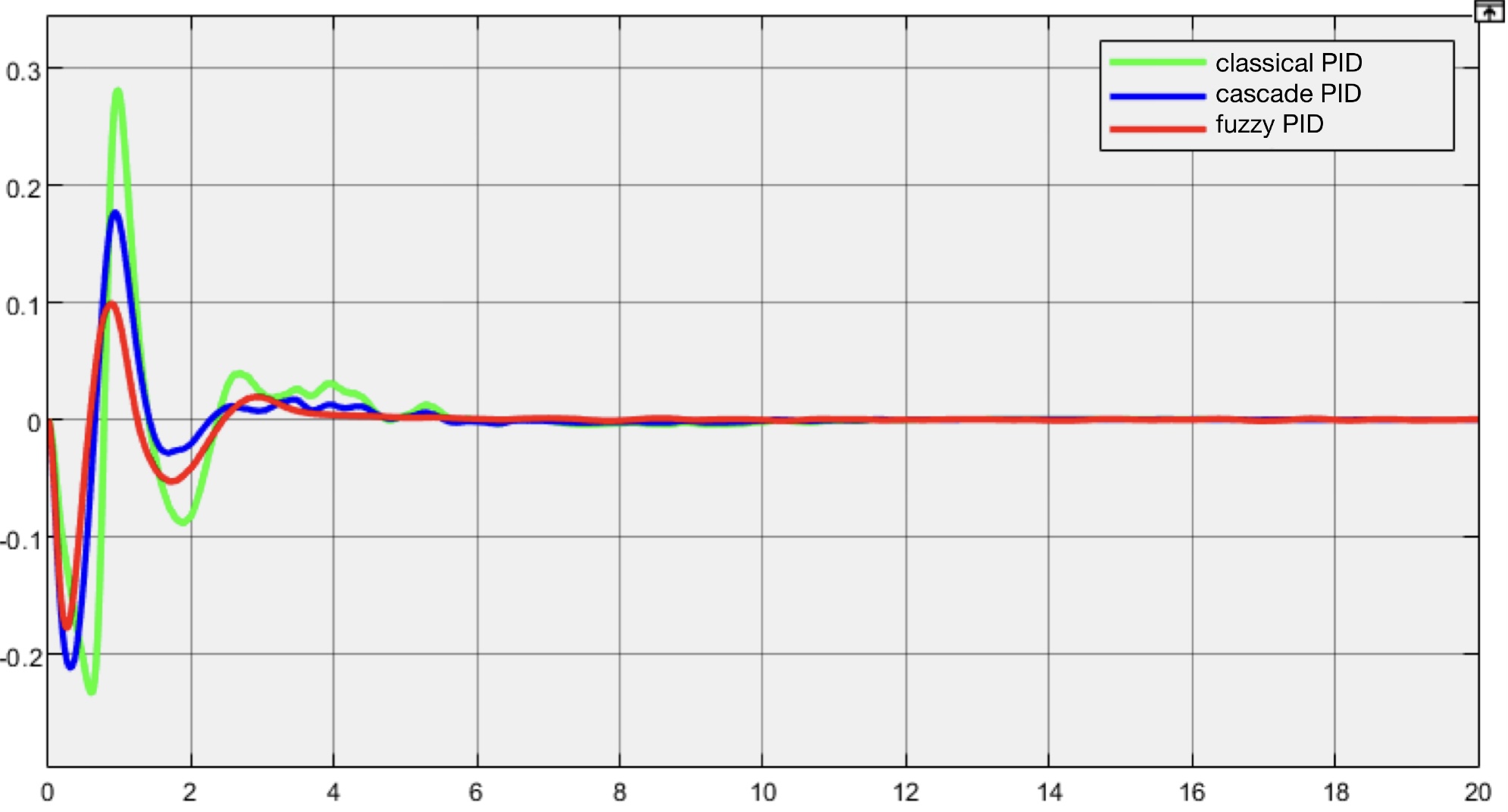
Figure 6. Controlling results of the three controllers of the pitch angle (wind disturbance).
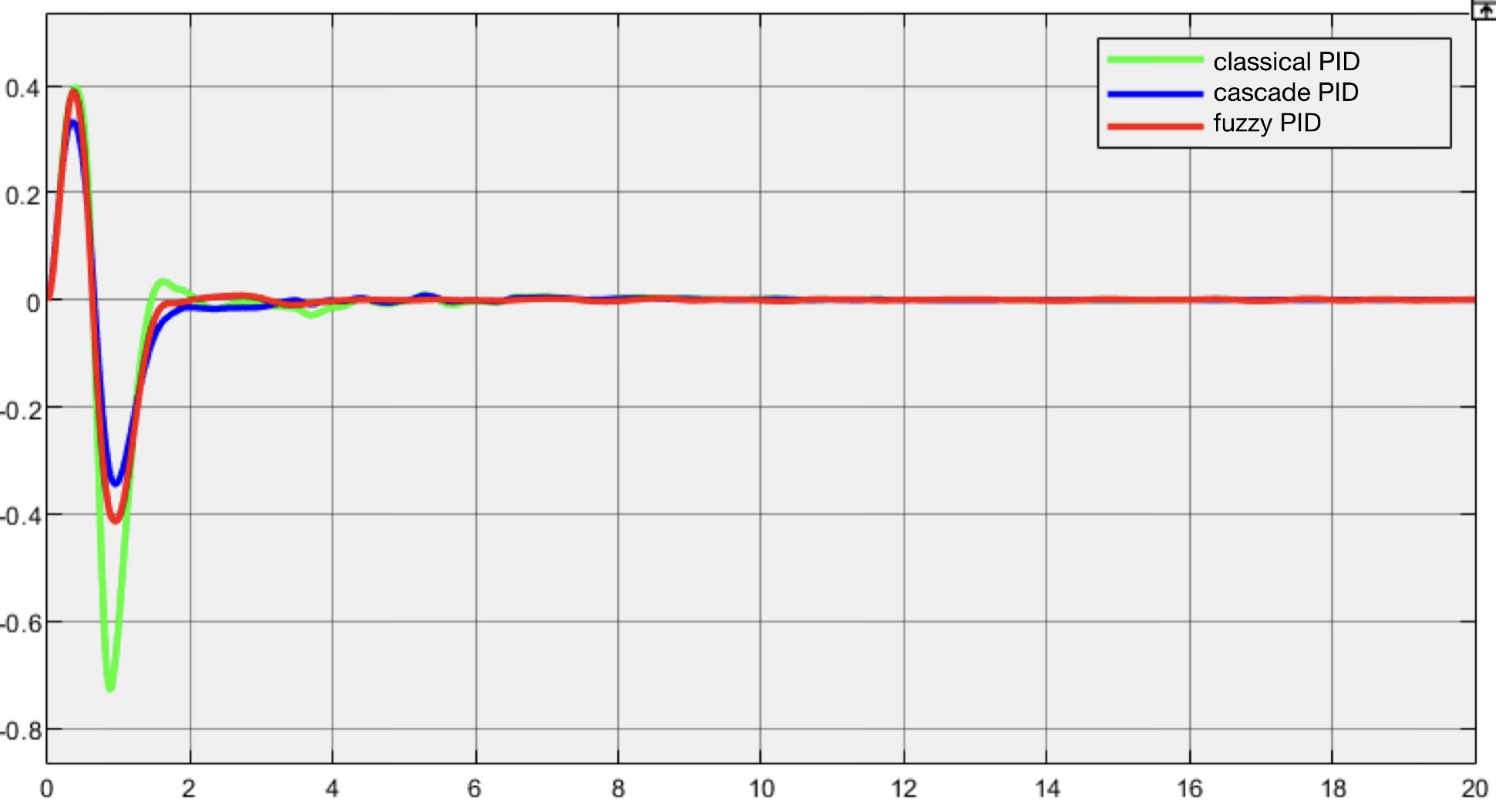
Figure 7. Controlling results of the three controllers of the roll angle (wind disturbance).
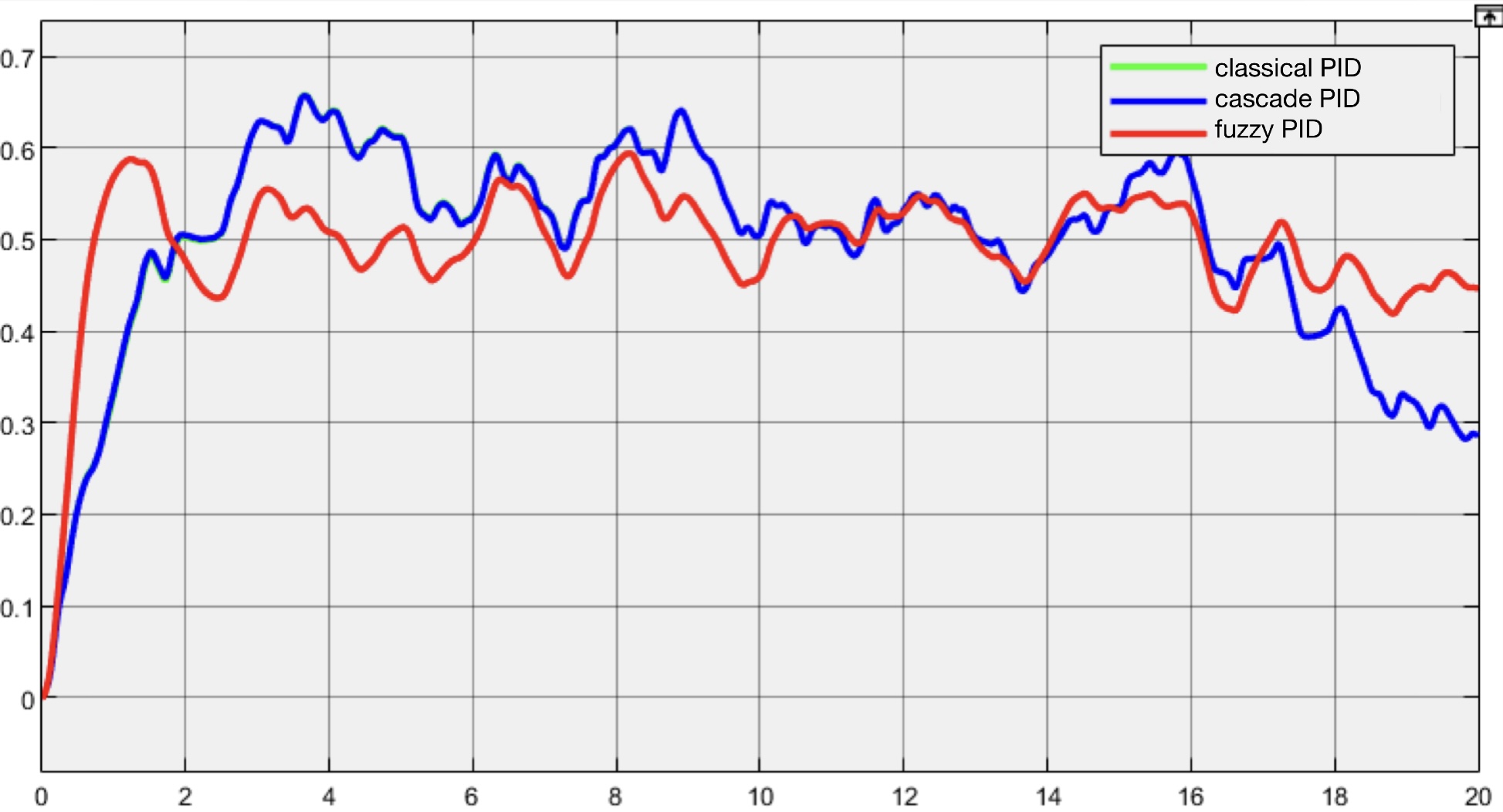
Figure 8. Controlling results of the three controllers of the yaw angle (wind disturbance).
Through the comparison, it can be found that the fuzzy PID control shows better control performance whether it is pitch angle, roll angle, yaw angle or Z direction. In the overshoot, fuzzy PID control is better than cascade PID, and fuzzy PID has better performance than the other two controllers in adjustment time. This is because the fuzzy PID can adjust the PID parameters in time through the fuzzy control, and make a better response speed to the changes of the system.
7. Conclusion
This paper analyzes the quad-rotor control system. Using the mechanism modeling method, the quad-rotor system is modeled, and the system function is obtained. Three control schemes: classical PID control, cascade PID control and fuzzy PID control are used in this paper. Then the quad-rotor system is controlled by three control methods. The simulation results show that all three control schemes can control the system, but fuzzy PID has more advantages in terms of stability and rapidity.
The quad-rotor system studied in this paper is just a simple basic model. The actual production process system is very complex. However, for more complex and huge systems, we can also use control effects to better control the system based on this research, such as neural network control.
References
[1]. Liang Zongwei, Xia Jiankuan, Zhang Zixuan, et al. (2021). Energy efficiency optimization of induction motor based on maximum torque input power ratio. Electric Transmission, 51(6): 57-61.
[2]. Xu Zhe. (2017). Research on wind disturbance resistance of quadrotor UAV based on SMC. Electro-Optics and Control, 24(1): 67-71.
[3]. Zheng Huaqing. (2017). Research on indoor navigation and control of multi-rotor UAV based on motion capture system. Nanjing University of Aeronautics and Astronautics.
[4]. H. Liu, G. Lu, Y. Zhong. (2013). Robust LQR attitude control of a 3-DOF laboratory helicopter for aggressive maneuvers. IEEE Trans on Industrial Electronics, 60(10): 4627-4636.
[5]. Lee H S S, D. (2009). Feedback Linearization vs. Adaptive Sliding Mode Control for a Quadrotor Helicopter. International Journal of Control Automation and Systems. 419-428.
[6]. Yue Jilong, Zhang Qingjie, Zhu Huayong. (2010). Research progress and key technology analysis of micro quadrotor UAV. Electro-Optics and Control, 17(10):46-52.
[7]. TMadani, ABenallegue. (2006). Backstepping Sliding Mode Control Applied to a Minia-ture Quadrotor Flying Robot. In Iecon 2006-32nd Annual Conference on IEEE Industrial Electronics. 1383-1388.
[8]. Xin Ruihao, Chen Minshi, Wang Tiantian, Sun Kai, Feng Xin. (2020). Research on the flight attitude control method of quadrotor UAV based on fuzzy PID. Information Technology and Informatization (12), 70-71.
[9]. Du Zuoyi, Ma Leyao. (2013). Research on Wind Speed Simulation Based on Matlab/simulink. Science and Technology of Western China, (12): 46-47
[10]. Loyal fans of Mr. Lu. (2022) Five minutes to take you to understand what is PID fuzzy algorithm. https://blog.csdn.net/qq_69925092/article/details/126334579
Cite this article
Gui,Y. (2023). Comparison of several PID controls for quad-rotor UAV under wind disturbance. Applied and Computational Engineering,5,139-145.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Liang Zongwei, Xia Jiankuan, Zhang Zixuan, et al. (2021). Energy efficiency optimization of induction motor based on maximum torque input power ratio. Electric Transmission, 51(6): 57-61.
[2]. Xu Zhe. (2017). Research on wind disturbance resistance of quadrotor UAV based on SMC. Electro-Optics and Control, 24(1): 67-71.
[3]. Zheng Huaqing. (2017). Research on indoor navigation and control of multi-rotor UAV based on motion capture system. Nanjing University of Aeronautics and Astronautics.
[4]. H. Liu, G. Lu, Y. Zhong. (2013). Robust LQR attitude control of a 3-DOF laboratory helicopter for aggressive maneuvers. IEEE Trans on Industrial Electronics, 60(10): 4627-4636.
[5]. Lee H S S, D. (2009). Feedback Linearization vs. Adaptive Sliding Mode Control for a Quadrotor Helicopter. International Journal of Control Automation and Systems. 419-428.
[6]. Yue Jilong, Zhang Qingjie, Zhu Huayong. (2010). Research progress and key technology analysis of micro quadrotor UAV. Electro-Optics and Control, 17(10):46-52.
[7]. TMadani, ABenallegue. (2006). Backstepping Sliding Mode Control Applied to a Minia-ture Quadrotor Flying Robot. In Iecon 2006-32nd Annual Conference on IEEE Industrial Electronics. 1383-1388.
[8]. Xin Ruihao, Chen Minshi, Wang Tiantian, Sun Kai, Feng Xin. (2020). Research on the flight attitude control method of quadrotor UAV based on fuzzy PID. Information Technology and Informatization (12), 70-71.
[9]. Du Zuoyi, Ma Leyao. (2013). Research on Wind Speed Simulation Based on Matlab/simulink. Science and Technology of Western China, (12): 46-47
[10]. Loyal fans of Mr. Lu. (2022) Five minutes to take you to understand what is PID fuzzy algorithm. https://blog.csdn.net/qq_69925092/article/details/126334579