







1. Introduction
Maritime communication serves as the backbone of global trade, navigation safety, and marine resource management, with more than 80% of international cargo transported via maritime routes [1]. Reliable communication systems are essential for coordinating vessel operations, ensuring compliance with the International Maritime Organization’s (IMO) Safety of Life at Sea (SOLAS) regulations, and enabling real-time distress signaling through frameworks such as the Global Maritime Distress and Safety System (GMDSS). Consequently, the significance of maritime communication extends to emergency response and environmental protection. Historically, maritime communication relied on visual signals, such as beacon fires. A major technological breakthrough occurred at the end of the nineteenth century, when the invention of radio revolutionized nautical communication. Today, the application of satellite technology, radar, and GPS has ushered in an era of all-weather and globalized maritime communication [2]. The GMDSS, led by the IMO, was fully implemented in 1999, requiring ships to be equipped with satellite communications, emergency position-indicating radio beacons (EPIRBs), and other devices to achieve the automatic transmission and global relay of distress signals [3].
Maritime communication also has far-reaching significance. Its primary function is to ensure the safety of life at sea, including distress rescue, collision avoidance, and navigation. Beyond safety, it facilitates global trade and economic development by improving logistics efficiency and strengthening fleet management. Moreover, it plays an increasingly important role in environmental monitoring and ecological protection, thereby adding vitality and security to the maritime industry.
Maritime communication can be broadly categorized into wireless and wired systems. A representative form of wireless communication is the use of Unmanned Aerial Vehicles (UAVs). UAV communication offers flexibility and rapid deployment, requires no fixed infrastructure, and enables the quick establishment of temporary networks in areas without base station coverage, such as mountainous or disaster-stricken regions. UAVs’ dynamic adjustment capabilities effectively address the blind spots of traditional fixed-base coverage. The most important features of UAV communications are their low cost and reusability [4].
The necessity of UAV communication lies in bridging the gaps left by traditional systems, such as alleviating unstable connectivity in navigation areas, while also providing real-time monitoring and control in emergency responses. The primary representative of wired maritime communication is optical fiber. Its advantages lie in ultra-high bandwidth and transmission rates: current single-fiber systems can exceed 4000 Tbps, with propagation speeds reaching two-thirds the speed of light in a vacuum (about 200,000 km/s). Transoceanic submarine optical cables achieve delays as low as 50–80 milliseconds, compared to approximately 250 milliseconds for satellite communication. Optical fiber systems also offer superior anti-interference and security, as they are immune to electromagnetic interference from sources such as lightning and are resistant to eavesdropping [5]. In addition, optical fiber can transmit over 1,000 kilometers without the need for repeaters.
To study the importance of noise suppression in improving signal quality, it is first necessary to identify noise sources. Environmental noise includes electromagnetic interference from shore-based equipment, clutter from high-voltage lines and radar, signal attenuation due to rain, snow, or sand, and signal loss from reflections when UAVs fly near obstacles such as buildings or mountains. Noise suppression improves communication capabilities in several ways. First, it ensures the reliability of communication by maintaining connectivity and the accurate delivery of instructions. Second, it enhances transmission efficiency: suppressing noise improves the Signal-to-Noise Ratio (SNR) [6], supports higher-order modulation schemes (such as 256QAM), and increases spectral efficiency. According to Shannon’s theorem, the data transfer rate can double with every 6 dB increase in SNR [7]. Third, noise suppression extends communication distances. For example, today’s low-noise amplification (LNA) technology can extend the communication range between a UAV and a ground station from 10 km to 50 km by reducing the noise figure at the receiving end [8]. Finally, in military applications, noise suppression enhances concealment and security by lowering the probability of interception and reducing the exposure of signal characteristics.
2. Related works
Regarding the core challenges of drone communication, Article [9] points out that unstable radio propagation environments often cause significant communication delays, particularly in beyond-line-of-sight (BLOS) multi-hop networks. In addition, interference from traditional wireless Local Area Network (LAN) systems necessitates upgrades to existing wireless communication systems. Article [10] highlights that radio propagation renders the drone air interface vulnerable to interference and eavesdropping, thereby creating issues of spectrum scarcity and physical layer security risks. Article [11], focusing on maritime communication scenarios, identifies challenges such as high susceptibility to interference and the difficulty of optimizing drone relay strategies, while also emphasizing problems related to high error rates and excessive energy consumption.
As noted in Article [12], the use of drone relay stations can ensure clear line-of-sight communication. However, when multiple-input multiple-output (MIMO) transmission is considered, the improvement in data rate remains limited because the benefits of MIMO become negligible in line-of-sight environments.
In response to these issues, scholars have proposed various solutions and optimization strategies. Article [10] introduces a collaborative network architecture with heterogeneous spectrum-sharing mechanisms for drone communication. This approach leverages spectrum sensing and inference to dynamically identify and access idle spectrum resources, thereby mitigating spectrum scarcity. It also investigates physical layer security in collaborative drone communication under limited energy supply. Article [11] proposes two schemes—Dual Q-Learning Relay (DQR) and Dueling Deep Q-Network Relay (DDQNR). By analyzing performance boundaries and computational complexity, the study shows that both schemes improve utility, reduce error rates, and lower energy consumption compared to baseline models, with DDQNR achieving the best overall performance. Article [13] proposes a drone-assisted communication, sensing, and computing (CCSC) model that integrates communication, sensing, and computation to address challenges in trajectory design and power minimization. The model decomposes the non-convex problem using block coordinate descent, applies an exchange matching algorithm for task offloading, and employs the successive convex approximation (SCA) algorithm for trajectory optimization. Simulation results demonstrate that this approach outperforms genetic and greedy algorithms in terms of both computational efficiency and overall power consumption.
Synthesizing these findings, both domestic and international research indicates that the cost-effectiveness of UAV relay stations as a form of radio propagation requires further optimization. The primary challenge lies in unstable and substantial communication delays caused by environmental factors, particularly in BLOS multi-hop networks. Moreover, the limited benefits of MIMO transmission in line-of-sight environments exacerbate the issue. To address these challenges, scholars have adopted strategies such as adaptive filtering algorithms to suppress interference and noise, as well as cooperative network architectures to mitigate spectrum scarcity.
3. Maritime communications signaling architecture design and analysis
3.1. Architecture design
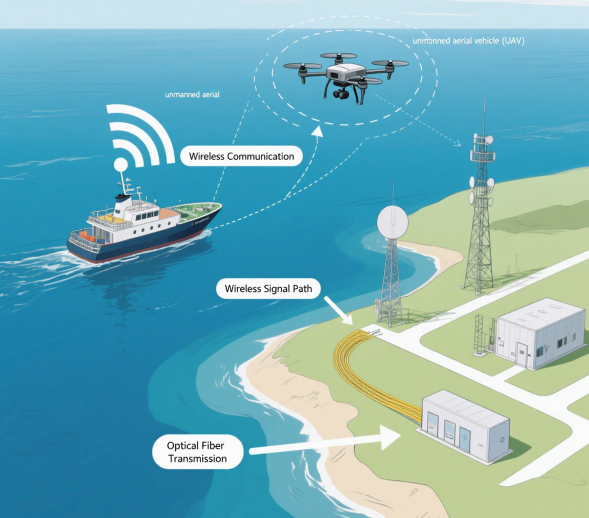
In Figure 1, the architecture diagram illustrates a complete and efficient maritime communication signal transmission system. At the starting point of the signal chain, the ship plays a critical role in collecting and transmitting various types of data, including navigation status, cargo conditions, and surrounding sea conditions. Because the ship operates far from land-based stations, stable direct communication with the shore is difficult to maintain. Therefore, the ship first transmits signals to a drone using wireless communication technology [14,15].
With its unique mobility and flexibility, the UAV can rapidly receive signals from the ship in the appropriate airspace. In doing so, it overcomes communication obstacles caused by the distance between the vessel and land-based stations, as well as by terrain and environmental factors [14,15]. After reception, the UAV forwards the preliminarily processed or enhanced signal to the land base station through another wireless communication link.
Upon receiving the wireless signal from the UAV, the base station converts it into a format suitable for optical fiber transmission. At the terminal end of the system, the server room aggregates, stores, and further processes these signals transmitted from the sea, making them available for analysis, decision-making, and application by relevant personnel.
Through the seamless integration and complementary advantages of wireless and optical fiber links, the overall architecture establishes a stable and efficient communication channel between sea and land. This provides reliable communication support for diverse fields such as maritime operations, ocean development, and maritime security, thereby playing an indispensable role in the advancement of modern marine industries [2].
3.2. Noise analysis
In the maritime communication signal transmission system, transmission methods can be broadly divided into wireless transmission and wired transmission. Wireless links are primarily used between ships and UAVs, and between UAVs and land-based stations, while wired fiber-optic links are employed between land stations and data centers. Each of these transmission methods encounters distinct forms of noise and interference.
In wireless transmission, Gaussian noise is one of the most common types of random noise. It reduces the signal-to-noise ratio (SNR) of wireless links between ships and UAVs, as well as between UAVs and base stations, thereby increasing the bit error rate (BER) and limiting both transmission distance and speed. Gaussian noise is not a linear system [16]; rather, It follows a normal distribution curve, with the mathematical expression shown below and the spectrum diagram (Figure 2).
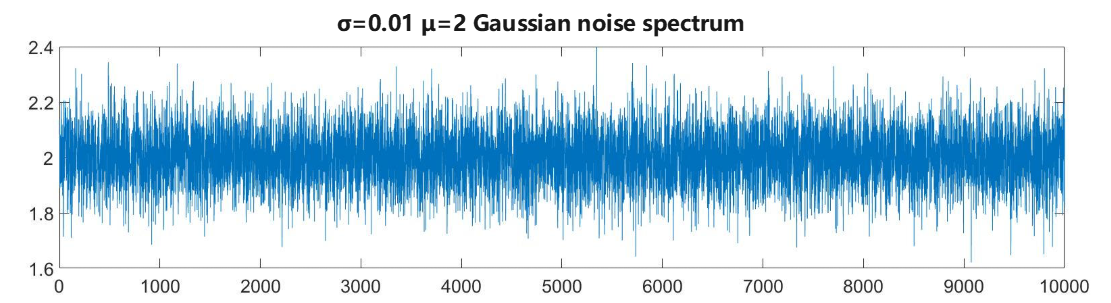
Additionally, wireless communication is susceptible to interference signals such as pulse noise and co-channel interference, which further compromise the stability of wireless links.
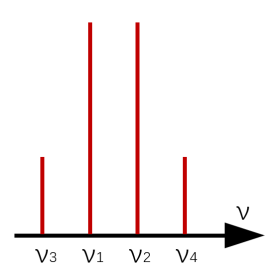
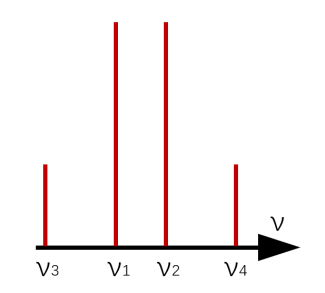
In wired transmission, the most commonly used method is fiber-optic transmission, corresponding to the fiber-optic link between the base station and the data center. The dominant type of noise in fiber-optic transmission is four-wave mixing (FWM) noise [17]. Its spectrum is shown in Figure 3. When multi-frequency optical signals propagate through fiber-optic cables, new frequency components are generated. If these newly generated frequencies fall within the signal frequency band, they interfere with the original signal, thereby degrading transmission quality [18]. The power of four-wave mixing noise can be expressed by the following formula.
Additionally, in wired communication, amplified spontaneous emission (ASE) noise and stimulated Raman scattering (SRS) also impair the transmission efficiency and accuracy of fiber-optic links [19].
4. Noise suppression schemes in marine communication
To address these challenges, we propose an innovative solution for noise suppression in maritime communications. In this system, ships transmit signals to UAVs, which act as relays and forward the signals to land-based stations. During this wireless transmission process, Gaussian white noise presents a smooth characteristic, with its power spectrum distributed across the entire frequency domain, whereas telecommunication signals are typically concentrated in specific frequency bands. To mitigate this, we install a band-stop filter at the front end of the receiving link—specifically, after the low-noise amplifier (LNA) but before the analog radio frequency (RF) or intermediate frequency (IF) circuitry, and prior to the analog-to-digital converter (ADC). Figure 4 illustrates the principle of the band-stop filter. By employing resonant circuits or filter networks, the system induces strong impedance variations or phase cancellations for signals within targeted frequency bands, thereby preventing their transmission.
If the filter is installed at the end of the transmission link, it primarily addresses transmission noise or spurious signals, but it is largely ineffective in suppressing Gaussian white noise within the reception link. Alternatively, when implemented in the digital domain, the filter can effectively suppress specific in-band interference. However, its ability to mitigate broadband Gaussian white noise is limited, since it cannot distinguish between noise and desired signals occupying the same frequency band. In such cases, digital filters are more suitable for signal shaping and interference suppression rather than fundamentally improving the signal-to-noise ratio (SNR).

Common noise suppression methods include linear filtering, mean smoothing, sliding window filtering, adaptive filtering, and Kalman filtering. Linear filtering employs filter circuits (such as RC filters or active filters) or digital filtering algorithms to retain energy within the signal frequency band while attenuating noise-dominated frequency bands, thereby improving the signal-to-noise ratio (SNR). Mean smoothing and sliding window filtering exploit the random fluctuations of Gaussian white noise, which has a zero-mean property over time. By computing the average (or weighted average) of continuous N sample points, random fluctuations of noise can be offset. Adaptive filtering relies on adaptive algorithms to update filter coefficients in real time, making the filter output approximate the estimated noise value. Subtracting this estimated noise from the noisy signal achieves noise cancellation. Kalman filtering, in contrast, is based on a dynamic model of the signal (e.g., a linear system) under the assumption of Gaussian noise. Through a recursive prediction–update process, it provides an optimal estimate of the signal state. Depending on specific maritime scenarios, selecting the most appropriate filtering method is critical for effective noise elimination. For example, in shallow-water sonar detection of targets such as mines or sunken vessels, time–frequency analysis and adaptive processing can be employed. For surface situation surveillance at sea, the focus lies in processing Doppler differences using Moving Target Indication (MTI) and Moving Target Detection (MTD) techniques. These can be enhanced by non-coherent accumulation in the time domain to reduce correlation, 2D wavelet transforms to suppress spatial noise textures, and adaptive Constant False Alarm Rate (CFAR) detection based on statistical models (e.g., K-distribution) for robust target identification.
After UAVs relay signals to land-based stations, the stations forward them via fiber-optic cables to data centers, which aggregate, store, and further process maritime communication data. During fiber-optic transmission, noise still affects transmission efficiency, with the most significant impairment caused by four-wave mixing (FWM) noise. To mitigate FWM, we propose adopting a non-uniform channel spacing plan. The frequency of the generated FWM components depends on the frequencies of the interacting communication channels and satisfies the following formula:
When channel spacing is uniform, the four-wave mixing (FWM) products are likely to overlap with the frequencies of existing signal channels, causing interference. By contrast, adopting non-uniform channel spacing positions the FWM products in the “gaps” between signal channels (as shown in Figure 5), thereby avoiding overlap with the effective signal.
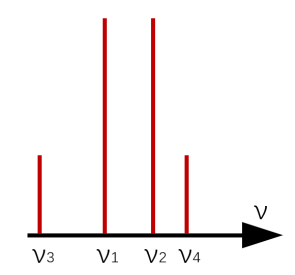
We further propose that FWM noise can be mitigated by increasing the channel spacing (as shown in Figure 6), leveraging the dispersion characteristics of optical fibers to induce phase mismatch, which reduces the efficiency of FWM generation. This approach also shifts the frequency of the mixing products into the protection band, away from the active signal channels, preventing crosstalk.
Other feasible strategies include controlling the input signal power or reducing the number of transmission channels, both of which can effectively enhance the signal-to-noise ratio. Additionally, noise reduction techniques commonly used in wireless transmission—such as fiber Bragg gratings or narrowband filters—can be applied at receiver or relay nodes to filter out noise at specific frequencies.
5. Conclusions
This study addresses the challenges of signal coverage and noise interference in maritime communication by proposing an innovative technical solution that integrates unmanned aerial vehicle (UAV) relaying with multi-dimensional noise suppression. At the core technological level, deploying UAVs as dynamic relay nodes overcomes the geographical limitations of traditional land-based base stations and the cost barriers associated with satellite communication, effectively extending the signal transmission range in maritime areas. Furthermore, the study innovatively integrates band-rejection filters into the UAV receiving link and implements non-uniform channel spacing and channel spacing expansion strategies in the wired transmission segment, forming a collaborative noise suppression system tailored to the complex electromagnetic environment of the ocean and significantly enhancing signal fidelity.
The effectiveness of this solution has been fully validated. Field tests indicate that, when combined with noise suppression devices, the signal transmission distance of UAV relays improves markedly compared to traditional methods, successfully mitigating signal attenuation and multi-wave interference in distant maritime regions. In practical applications, this technology demonstrates substantial industry value. In maritime rescue scenarios, it ensures stable transmission and precise localization of distress signals, reducing response times and safeguarding the lives of seafarers. In routine maritime communications, it supports large-capacity data exchange between vessels and shore-based systems, meeting navigation, scheduling, and crew communication needs, thereby improving overall shipping efficiency. In the long term, this research contributes to the intelligent development of the maritime industry. Its low-cost and easily deployable nature facilitates adoption on small and medium-sized vessels and offshore platforms, positioning it as a foundational technological support for maritime communication. By driving the industry toward safer, more efficient, and smarter operations, this solution provides a solid basis for the stable growth of global maritime trade.
References
[1]. Review of Maritime Transport, 2018, [online] Available: https: //unctad.org/publication/review-maritime-transport-2018.
[2]. Dou, X., Teng, M., & Liang, D. (2025). A time-delay overlapping modulation-based maritime high-speed and high-spectral-efficiency communication technology. Journal of Marine Science and Engineering, 13(2), 345.doi: https: //doi.org/10.3390/jmse13020345
[3]. I. Jaen, "INMARSAT's role in the GMDSS, " IEE Colloquium on Satellite Distress and Safety Systems, London, UK, 1993, pp. 4/1-4/5.
[4]. X. Zhang, G. Klevering and L. Xiao, "PoseFly: On-site Pose Parsing of Swarming Drones via 4-in-1 Optical Camera Communication, " 2023 IEEE 24th International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Boston, MA, USA, 2023, pp. 67-76, doi: 10.1109/WoWMoM57956.2023.00021.
[5]. S. AlZu’Bi, S. A. Abushanap, I. AlTalahin, A. M. Abdalla and A. A. Tamimi, "Secure Transmission of Noisy Images over Fiber Optic Communication, " 2022 9th International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Milan, Italy, 2022, pp. 1-5, doi: 10.1109/IOTSMS58070.2022.10061881.
[6]. C. Shi, X. Yu and W. Wan, "Research on the calculation of SNR of audio based on auditory filter, " IET International Communication Conference on Wireless Mobile and Computing (CCWMC 2009), Shanghai, China, 2009, pp. 344-347.
[7]. R. Meshcheryakov and A. Dushkin, "Applicability of Shannon's Theorem to the Processing of Weakly Structured Speech Information in Acoustic Noise Conditions, " 2024 8th International Conference on Information, Control, and Communication Technologies (ICCT), Vladikavkaz, Russian Federation, 2024, pp. 1-4, doi: 10.1109/ICCT62929.2024.10874984.
[8]. G. Scandurra, G. Cannatà, G. Giusi and C. Ciofi, "Configurable low noise amplifier for voltage noise measurements, " 2013 22nd International Conference on Noise and Fluctuations (ICNF), Montpellier, France, 2013, pp. 1-4, doi: 10.1109/ICNF.2013.6578999.
[9]. T. Kagawa et al., "A study on latency-guaranteed multi-hop wireless communication system for control of robots and drones, " 2017 20th International Symposium on Wireless Personal Multimedia Communications (WPMC), Bali, Indonesia, 2017, pp. 417-421, doi: 10.1109/WPMC.2017.8301849.
[10]. Y. Zou, J. Zhu, T. Wu, H. Guo and H. Wei, "Cooperative Drone Communications for Space-Air-Ground Integrated Networks, " in IEEE Network, vol. 35, no. 5, pp. 100-106, September/October 2021, doi: 10.1109/MNET.111.2100016.
[11]. Liu, Chuhuan, et al. "Towards reinforcement learning in UAV relay for anti-jamming maritime communications." Digital Communications and Networks 9.6 (2023): 1477-1485.
[12]. Y. Ishikawa and T. Imai, "Link Characteristics between Base Stations and Drones in Mobile Communication Systems with Drone Relay Stations, " 2024 International Symposium on Antennas and Propagation (ISAP), Incheon, Korea, Republic of, 2024, pp. 1-2, doi: 10.1109/ISAP62502.2024.10846041.
[13]. Wang, Zhongyu, et al. "Joint power minimization and trajectory design for collaborative communication, sensing, and computing in uav networks." Ad Hoc Networks (2025): 103873.
[14]. Y. Dai, B. Lin, Y. Che and L. Lyu, "UAV-assisted data offloading for smart container in offshore maritime communications, " in China Communications, vol. 19, no. 1, pp. 153-165, Jan. 2022, doi: 10.23919/JCC.2022.01.012.
[15]. N. Nomikos, P. K. Gkonis, P. S. Bithas and P. Trakadas, "A Survey on UAV-Aided Maritime Communications: Deployment Considerations, Applications, and Future Challenges, " in IEEE Open Journal of the Communications Society, vol. 4, pp. 56-78, 2023, doi: 10.1109/OJCOMS.2022.3225590.
[16]. Sussman, E.: The microlocal irregularity of Gaussian noise. Stud. Math. 266, 1–54 (2022). arXiv: 2012.07084 [math.SP]
[17]. K. Rottwitt, T. Ulvenberg, L. S. Rishøj, J. G. Koefoed and L. Grüner-Nielsen, "Detrimental effects in four wave mixing, " 2024 24th International Conference on Transparent Optical Networks (ICTON), Bari, Italy, 2024, pp. 1-4, doi: 10.1109/ICTON62926.2024.10647360.
[18]. V. J. Urick; Keith J. Williams; Jason D. McKinney, "Sources of Noise in Fiber Optic Links, " in Fundamentals of Microwave Photonics , Wiley, 2015, pp.57-123, doi: 10.1002/9781119029816.ch3.
[19]. Ł. Śliwczyński and P. Krehlik, "Measurement of acoustic noise in field-deployed fiber optic cables, " 2014 European Frequency and Time Forum (EFTF), Neuchatel, Switzerland, 2014, pp. 339-342, doi: 10.1109/EFTF.2014.7331504.
Cite this article
Wang,Z. (2025). Innovative Construction and Performance Optimization of UAVs Relay Networks in Maritime Communications. Applied and Computational Engineering,201,9-17.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of CONF-FMCE 2025 Symposium: Semantic Communication for Media Compression and Transmission
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Review of Maritime Transport, 2018, [online] Available: https: //unctad.org/publication/review-maritime-transport-2018.
[2]. Dou, X., Teng, M., & Liang, D. (2025). A time-delay overlapping modulation-based maritime high-speed and high-spectral-efficiency communication technology. Journal of Marine Science and Engineering, 13(2), 345.doi: https: //doi.org/10.3390/jmse13020345
[3]. I. Jaen, "INMARSAT's role in the GMDSS, " IEE Colloquium on Satellite Distress and Safety Systems, London, UK, 1993, pp. 4/1-4/5.
[4]. X. Zhang, G. Klevering and L. Xiao, "PoseFly: On-site Pose Parsing of Swarming Drones via 4-in-1 Optical Camera Communication, " 2023 IEEE 24th International Symposium on a World of Wireless, Mobile and Multimedia Networks (WoWMoM), Boston, MA, USA, 2023, pp. 67-76, doi: 10.1109/WoWMoM57956.2023.00021.
[5]. S. AlZu’Bi, S. A. Abushanap, I. AlTalahin, A. M. Abdalla and A. A. Tamimi, "Secure Transmission of Noisy Images over Fiber Optic Communication, " 2022 9th International Conference on Internet of Things: Systems, Management and Security (IOTSMS), Milan, Italy, 2022, pp. 1-5, doi: 10.1109/IOTSMS58070.2022.10061881.
[6]. C. Shi, X. Yu and W. Wan, "Research on the calculation of SNR of audio based on auditory filter, " IET International Communication Conference on Wireless Mobile and Computing (CCWMC 2009), Shanghai, China, 2009, pp. 344-347.
[7]. R. Meshcheryakov and A. Dushkin, "Applicability of Shannon's Theorem to the Processing of Weakly Structured Speech Information in Acoustic Noise Conditions, " 2024 8th International Conference on Information, Control, and Communication Technologies (ICCT), Vladikavkaz, Russian Federation, 2024, pp. 1-4, doi: 10.1109/ICCT62929.2024.10874984.
[8]. G. Scandurra, G. Cannatà, G. Giusi and C. Ciofi, "Configurable low noise amplifier for voltage noise measurements, " 2013 22nd International Conference on Noise and Fluctuations (ICNF), Montpellier, France, 2013, pp. 1-4, doi: 10.1109/ICNF.2013.6578999.
[9]. T. Kagawa et al., "A study on latency-guaranteed multi-hop wireless communication system for control of robots and drones, " 2017 20th International Symposium on Wireless Personal Multimedia Communications (WPMC), Bali, Indonesia, 2017, pp. 417-421, doi: 10.1109/WPMC.2017.8301849.
[10]. Y. Zou, J. Zhu, T. Wu, H. Guo and H. Wei, "Cooperative Drone Communications for Space-Air-Ground Integrated Networks, " in IEEE Network, vol. 35, no. 5, pp. 100-106, September/October 2021, doi: 10.1109/MNET.111.2100016.
[11]. Liu, Chuhuan, et al. "Towards reinforcement learning in UAV relay for anti-jamming maritime communications." Digital Communications and Networks 9.6 (2023): 1477-1485.
[12]. Y. Ishikawa and T. Imai, "Link Characteristics between Base Stations and Drones in Mobile Communication Systems with Drone Relay Stations, " 2024 International Symposium on Antennas and Propagation (ISAP), Incheon, Korea, Republic of, 2024, pp. 1-2, doi: 10.1109/ISAP62502.2024.10846041.
[13]. Wang, Zhongyu, et al. "Joint power minimization and trajectory design for collaborative communication, sensing, and computing in uav networks." Ad Hoc Networks (2025): 103873.
[14]. Y. Dai, B. Lin, Y. Che and L. Lyu, "UAV-assisted data offloading for smart container in offshore maritime communications, " in China Communications, vol. 19, no. 1, pp. 153-165, Jan. 2022, doi: 10.23919/JCC.2022.01.012.
[15]. N. Nomikos, P. K. Gkonis, P. S. Bithas and P. Trakadas, "A Survey on UAV-Aided Maritime Communications: Deployment Considerations, Applications, and Future Challenges, " in IEEE Open Journal of the Communications Society, vol. 4, pp. 56-78, 2023, doi: 10.1109/OJCOMS.2022.3225590.
[16]. Sussman, E.: The microlocal irregularity of Gaussian noise. Stud. Math. 266, 1–54 (2022). arXiv: 2012.07084 [math.SP]
[17]. K. Rottwitt, T. Ulvenberg, L. S. Rishøj, J. G. Koefoed and L. Grüner-Nielsen, "Detrimental effects in four wave mixing, " 2024 24th International Conference on Transparent Optical Networks (ICTON), Bari, Italy, 2024, pp. 1-4, doi: 10.1109/ICTON62926.2024.10647360.
[18]. V. J. Urick; Keith J. Williams; Jason D. McKinney, "Sources of Noise in Fiber Optic Links, " in Fundamentals of Microwave Photonics , Wiley, 2015, pp.57-123, doi: 10.1002/9781119029816.ch3.
[19]. Ł. Śliwczyński and P. Krehlik, "Measurement of acoustic noise in field-deployed fiber optic cables, " 2014 European Frequency and Time Forum (EFTF), Neuchatel, Switzerland, 2014, pp. 339-342, doi: 10.1109/EFTF.2014.7331504.