






1. Introduction
The Unmanned Aerial Vehicle (UAV) broadly encompass all flights that do not require a pilot to board and operate them, using remote control, guidance, or automatic driving to control and accomplish a series of tasks. UAVs are usually equipped with various sensors and control devices to enable safe flight in the air. The development of UAV technology has provided new ideas for many industries to complete tasks more efficient, precise, and safe.
With the widespread application of UAV in various fields in recent years, the task automation planning of UAVs has also been continuously improved. The obstacle avoidance and trajectory planning are key technologies for autonomous path planning of UAVs. The main purpose of path planning is finding a safe and feasible route to avoid the influence of obstacles under the physical constraints of the UAV. Among them, the artificial potential field-based UAV obstacle avoidance method is a commonly used method. This method achieves obstacle avoidance of UAVs through simulating a virtual artificial potential field to describe certain characteristics in the environment around the UAV and calculate the safe route based on the magnitude and direction of the forces.
With the widespread use of artificial potential field methods, the problems associated with its use in planning have become increasingly apparent., therefore research on improving this method have also received extensive attention and research [1]. Scholars all over the world have conducted extensive research in this field, proposed various theories and methods, and achieved certain research results. This article reviews the artificial potential field-based UAV obstacle avoidance method, focusing on its basic principles, composition methods, basic applications, general classification and advantages and disadvantages. Based on this, it’s possible future development directions and prospects are foreseen.
2. Artificial potential field method
2.1. Repulsive field and attractive field
Artificial Potential Field (APF) is a commonly used robot path planning method. Its basic idea is to regard robots and obstacles as particles in a physical system and guide the robot’s movement by constructing a virtual artificial potential field. Usually, the target point has the lowest potential field while the starting point has the highest potential field. This method regards the movement of objects because of force. The artificial potential field acts are like the effect of different magnetic poles on conductors in an electromagnetic environment [1]. It mainly consists of two parts: one part is an attractive field generated by the target point in the system, and the other part is a repulsive field generated by obstacles in the system [2]. For systems in potential fields, the total potential field source of motion comes from the combined action of repulsive and attractive forces. Therefore, robots can be guided and controlled by the combined force generated by gravitational and repulsive fields. Figure 1 shows a 3D model of a potential field established based on the APF method. It clearly shows the path of a robot that is moving under the influence of the force field [3].
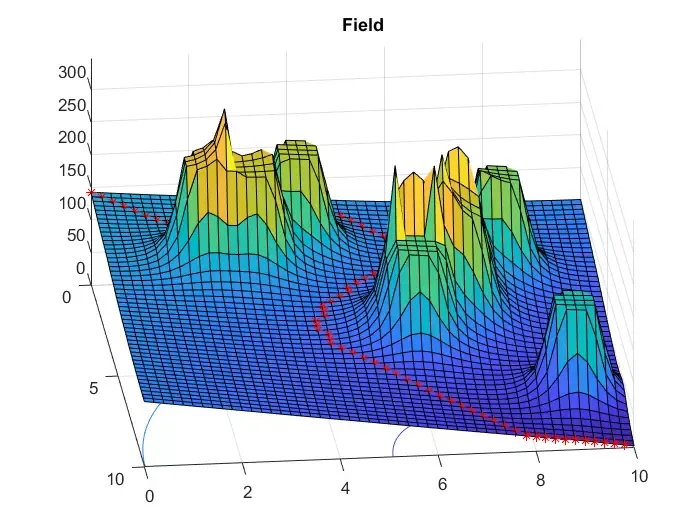
Figure 1. 3D potential field model with planned path[3].
The net force that applied to the robot in an artificial potential field can be calculated using equation (1).
\( {F_{total}}={F_{att}}+{F_{rep}} \) (1)
Where \( {F_{total}} \) is the total net force, \( {F_{att}} \) is the attraction force from the target point, and \( {F_{rep}} \) is the repulsive force from obstacles.
In simulations or experiments, attraction and repulsion fields can be set arbitrarily, but in practical applications, certain design standards are generally followed. Among them, the attraction field is affected by the distance between the robot and the target point. The potential energy decreases monotonically with distance and satisfies the definition of attraction force in equation (2).
\( { F_{att}}={k_{att}}*d({p_{robot}}, {p_{target}}) \) (2)
Where \( {F_{att}} \) is the total attraction force, \( {k_{att}} \) is a constant coefficient describe the relationship between the distance to the target point and the value of attraction force, \( d({p_{robot}}, {p_{target}}) \) describes the distance between the target and the robot.
When calculating the magnitude of repulsive force, a size of influence domain is generally determined first. When the value of robot’s distance from obstacles exceeds this value, obstacles will not exert repulsive force on robots. If the value is less than the threshold value, then the potential energy value of repulsion field increases monotonically with decreasing distance and satisfies equation (3).
\( {F_{rep}}=\frac{1}{2}{k_{rep}}*(\frac{1}{d({p_{robot}}, {p_{obstacle}})}-\frac{1}{{p_{influence}}}) \) (3)
When \( { F_{rep}} \) is the repulsive force applied to the robot, \( {k_{rep}} \) is a repulsive constant that determines the strength of repulsive force, \( d({p_{robot}}, {p_{obstacle}}) \) represented the distance between robot and the obstacle, and \( { p_{influence}} \) is the radius of influence range from the obstacle, which means where that obstacles start to affect robot’s movement. Therefore, if the robot moving away from obstacles, the repulsive force becomes weaker. When the robot is moving approaches obstacles, the repulsive force will gradually increase [4].
Figure 2 depicts a force analysis of a robot guided by artificial potential field method under a simple condition.
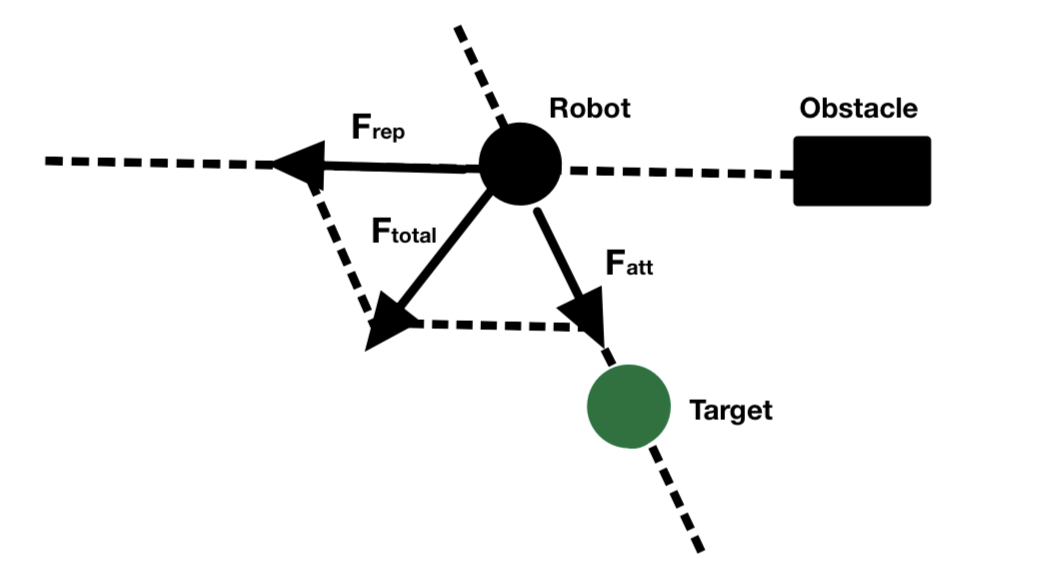
Figure 2. Force analysis of a robot using APF method.
The artificial potential field algorithm of robots is also applicable for UAVs. However, because of the path planning of robots is usually applied on a plane, as the path planning of UAVs mainly works in a three-dimensional space, so the calculation amount of the algorithm increases to some extent. In addition, when planning paths for UAVs, it is also important to consider environmental factors such as wind speed, air pressure, temperature and their impact on UAV movement and adjust accordingly. This may require expanding the algorithm, such as adding a background potential field to the artificial potential field to include these factors in consideration [5].
2.2. Advantages and disadvantages of APF and improvement methods
Artificial potential field (APF) has the advantages of low calculation amount and high real-time performance, which is convenient for executing online route planning tasks, and the planned route is relatively smooth [1]. Also, APF method is a feedback control strategy, which has certain robustness in control and sensing errors (which means under certain parameter perturbations, the control system maintains other performance characteristics) [6].
However, APF method also has some problems in application, including the following main problems [1]:
1. Being trapped or behavior cyclically when reaching a local minimum value.
2. When there is no passable passage when obstacles are very close to each other.
3. Oscillation when there are obstacles at specific locations.
4. Oscillation in narrow passages [7].
5. If the target point is really close to an obstacle, the robot cannot reach the target due to the nearby obstacles [8].
Problem 1 mainly refers to the existence of some positions in the potential field where the repulsive and the attractive force are balanced, so the potential field does not exert any force to the robot. Currently, the velocity gradient is 0, and the robot no longer moves, but it has not reached the target point. Problem 2 describes that when a robot moves close to two obstacles that are very close to each other, their repulsive forces are combined into two concentrated repulsive forces, and the sum of all repulsive forces directly points to the opening between the two obstacles. Depending on the relative size of the target pointing force, the robot will move closer to the opening or turn away [7]. Problems 3 and 4 describe an important limitation of artificial potential field method, which may cause unstable motion when obstacles exist. When a robot travels along an obstacle, the sum of lateral forces is zero. If stability conditions are not met, oscillation and unstable motion will occur [7]. S.S.Ge proposed problem 5 under the premise of existence of problems 1-4. It mainly describes that when an obstacle is too close to a target point, its attraction is small while its repulsion may be relatively large[8,9] . Therefore, it may not reach the target point and may be forced to move away. Figure 3 shows local minimum in a system [10].
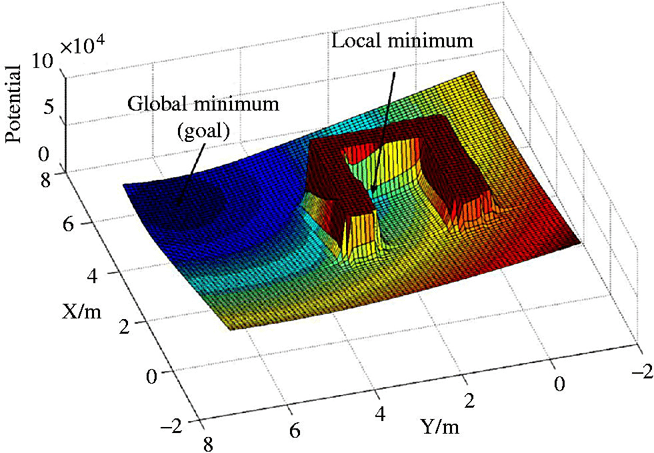
Figure 3. Local minimum problem [10].
Many researchers have analyzed and improved the algorithm for these problems. The most representative one is Ge Shuzhi from National University of Singapore. His team improved the repulsive force function of potential filed in APF method and initially solved the problems of local minimum points, unreachable targets, and avoidance of moving threats [1]. The new algorithm introduces a new repulsive potential energy function in APF method when considering the relative distance between the target and the robot, making the target position as the global minimum value of the total potential energy. Based on this, some researchers conceived a new configuration of APF method and tried to combine it with other route planning methods. For example, Cao L et al. proposed an APF method based on Gaussian repulsive function for three-dimensional flight path planning of aircraft obstacle avoidance, thereby achieving better resistance to local optimal characteristics and reachability [11]. In addition, Lou.G [12] introduced the concept of additional attractive field to APF. By properly adjusting the size and direction of additional attractive field, local minimum cases can be effectively avoided under certain conditions.
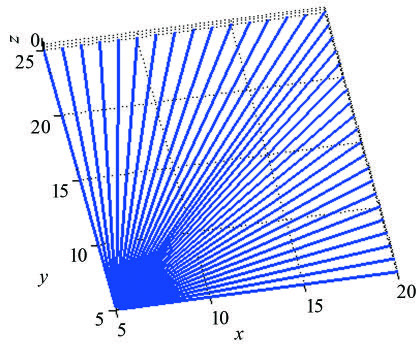
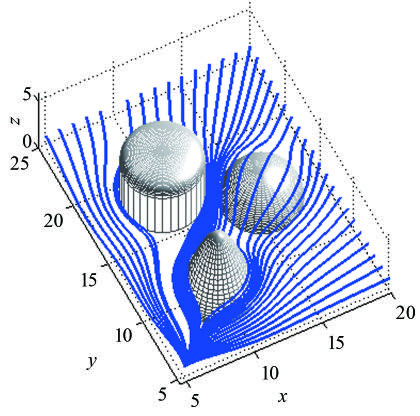
In addition, because there is no concept of obstacle shape in artificial potential field method, the robot may be trapped inside the obstacle when the force field parameters are inappropriate. To solve this problem and the problem of local optimal solutions, Waydo S et al. proposed an improved method using flow function [13,14]. By introducing some initial flow field in space, its velocity potential can be obtained according to fluid mechanics knowledge; when there are obstacles in the flow field, just superimposing the obstacle disturbance potential field and the original initial flow field that will comes out the resulted potential field, and then its velocity potential can be derived to obtain the flow velocity of the flow field; integrating the flow velocity obtains the fluid streamline that is used for route planning [1]. This method plans quickly and has a smooth path but can only be used for two-dimensional path planning. Based on the flow function method, Wu Jianfa et al. proposed a “flow water avoidance stone” path algorithm by simulating macroscopic characteristics of flowing water in nature to establish an algorithm while introducing the concept of three-dimensional obstacle envelope [1]. Thus, through fluid mechanics methods, three-dimensional terrain is simulated by flow fields to perform route optimization and obtain three-dimensional flyable routes. Figure 4 and Figure 5 show a schematic diagram of original initial flow fields and the potential field superimposing original field with obstacle disturbance potential fields through flow functions in the improved method [1].
|
|
Figure 4. Initial flow field[1]. | Figure 5. disturbed flow field[1]. |
3. Application scenarios
APF method, as a commonly used UAV obstacle avoidance algorithm, has been applied in many fields and has wide applications in both static and dynamic scenarios. The following will introduce some application examples from the aspects of application in static scenarios and application in dynamic scenarios.
3.1. Application of static scene
Obstacle avoidance in static environments mainly refers to UAVs avoiding collisions with fixed obstacles, such as UAVs flying in cities need to avoid collisions with buildings, trees, and other static obstacles. For static scenarios, UAVs can plan their paths in advance before proceeding. The required amount of calculation is small, so repeated calculations can be performed to obtain the theoretical optimal solution [15]. However, if it is in open environments, still many factors that interfere with UAV flight need to be considered, including changes in temperature, wind speed, air pressure and other conditions, which will also bring disturbance in the algorithm [16].
In addition, the APF method can also be applied in obstacle avoidance of indoor static environments [17]. For example, in factories and warehouses, when UAVs avoid obstacles such as machinery and shelves, they can use the APF method to model the scene and plan their paths. This environment is less disturbed and is often suitable for planning paths for multiple round trips. It can be used for a long time without re-planning and only rely on sensors for emergency obstacle avoidance. Indoor static environments are also used as theoretical environments for analysis and training using the APF method and the most ideal environment for implementation [18].
3.2. Application of dynamic scenes
In dynamic environments, the APF method, as an algorithm with strong real-time response capability and small amount of calculation, has a wide range of application prospects, but the application of obstacle avoidance in dynamic scenarios is more complex and has many limitations [19,20]. One application of UAV obstacle avoidance in a dynamic scenario is multiply UAVs cooperative flight, such as using multiple UAVs for autonomous transportation in large warehouses. In this case, the obstacle avoidance relationship between multiple UAVs needs to be considered. When making path planning for multiply UAVs, the APF method can build a model for UAV cooperative flight, treating each UAV as a moving obstacle, so that multiple UAVs can avoid each other during flight and avoid collisions [19,21].
In urban application environments, the complex environment and obstacles have increased the difficulty of obstacle avoidance. When applying the APF method in UAV’s obstacle avoidance, it becomes necessary to model and identify obstacles in the city and calculate the repulsion force on the UAV according to their position and size. At the same time, it is also necessary to monitor the motion state of the UAV in every time-step to calculate its attraction according to its position and target position, thereby obtaining the direction and speed of the UAV’s motion [17].
Therefore, when applying APF method for UAV in obstacle avoidance in dynamic environments, there are generally several requirements:
1. Use high-precision sensors: The UAV needs to be equipped with high-precision sensors to improve its perception ability and positioning accuracy. In addition, sensors must also have high refresh efficiency to continuously update the state of the environment in real time to prevent dynamic obstacles (animals, operating machinery, etc.) from suddenly changing their position and causing interference or harm to the UAV.
2. Optimize algorithms: Optimize algorithms specifically for required specific dynamic environments, such as sensor recognition capabilities and avoidance behavioral logic.
3. Predicting the movement of obstacles: It is possible to try dynamic analysis of obstacles to determine their movement trends and use algorithms to predict their movement trajectories to timely adjust the movement state of UAVs [17,19].
4. Comparison of APF and Q-learning
APF method and Q-learning s are both common solutions for UAV’s obstacle avoidance algorithms. And the APF method is a classic UAV obstacle avoidance algorithm which is firstly introduced by Khatib O in 1985 [20]. The method’s biggest advantage is that it is simple and easy to implement. It can achieve good obstacle avoidance effects in static environments. However, using traditional APF methods is prone to falling into a cycle of local minima, and its ability to handle complex environments and dynamic obstacles is poor [1].
Compared to the APF method, Q-learning is a reinforcement learning algorithm that learns the optimal strategy through multiply Interacting with the environment [1]. Q-learning enables robots to recognize corresponding obstacles and make corresponding obstacle avoidance behaviours’ while continuously learning, so it has good performance in dealing with both static and dynamic environments. When using this method for path planning, each time the robot simulates, it will observe the state of the environment, then decide a next step movement according to the current strategy, then judge whether to receive a reward based on feedback. Therefore, the main logical of the Q-learning algorithm is learning the optimal strategy and plans the path by continuously updating the reward value [4].
In Q-learning method, the reward value represents the expected cumulative reward that can be obtained by taking a certain action in each state. The agent updates the reward value by continuously trying different actions and eventually learns an optimal strategy [1]. Under the optimal strategy, the robot will choose the action with the maximum reward value in each state to achieve optimal path planning. However, compared with artificial potential field methods, hardware that implements Q-learning algorithms needs to have greater computing power in order to quickly update reward values and make decisions. In addition, robots need to be able to perceive environmental states and receive feedback. Therefore, multiple sensors such as lidar sensors and vision sensors need to include to observer information at every time-step about obstacles in the environment. And when deep learning methods are applied to UAV obstacle avoidance, this requires UAVs to be equipped with sensors capable of detecting obstacles, such as lidar or cameras, which will add cost and volume weight concerns to UAVs [4,5].
5. Future development trends and prospects
UAV’s obstacle avoidance method based on the APF method is a classic algorithm that has a certain research and application foundation. In view of the current problems and disadvantages of this algorithm, in the future, this classic path planning method should be combined with new generation algorithm technologies represented by DRL [1] to further solve the problems existing in the classic algorithm, such as local minimum values and unreachable goals. At the same time, maintain the advantages of the algorithm, including low cost and high efficiency, and further improve the algorithm [21].
Secondly, with the development of machine learning and artificial intelligence, UAV obstacle avoidance algorithms based on APF methods can better integrate these technologies. By combining technologies such as deep learning, the learning ability and adaptability of the algorithm can be improved to achieve more efficient obstacle avoidance effects in more complex environments. For example, technologies such as convolutional neural networks can be used to identify and classify obstacles in the environment in real-time situation, and then perform dynamic planning based on identification results to achieve more precise and efficient obstacle avoidance [22, 23].
In general, UAV obstacle avoidance based on artificial potential field methods still has considerable potential and prospects. By optimizing algorithms and integrating new technologies, this technology can be continuously iterated and expanded to be an important method in the development of UAV obstacle avoidance technology.
6. Conclusion
Artificial potential field (APF) method is a commonly used robot path planning method and is also applicable to UAVs. By constructing a virtual potential field to guide the UAVs and making path planning, collisions with obstacles can be avoided. The APF method mainly has the advantages of low computational complexity and high real-time performance. But it also has some problems, such as trapping into local minimum points, no passable channels between obstacles, and oscillations, these limitations can significantly impact the accuracy and efficiency of path planning in complex environments, hindering the practical applicability of the APF method.
To solve these problems in the algorithm, many of the researchers have analyzed and improved this algorithm. The most representative improvement is on the repulsive potential field function, which initially solved the problem of the artificial potential field method. Many other research teams have further improved the APF method. While researchers have made significant strides in improving the APF method, additional algorithmic and hardware improvements are necessary to overcome these limitations.
In static scenarios, UAV obstacle avoidance based on APF methods has the advantages of high efficiency and low computational amount. However, in dynamic or mixed scenarios, there are some limitations to a APF method and necessary improvements in algorithms and hardware are needed. As comparison, UAVs using active obstacle avoidance have stronger processing capabilities in dynamic scenarios but have relatively higher costs and computational complexity.
The review also has some limitations inevitably. The improved APF methods summarized in this paper focus on a few representative methods, and further research will cover more additional types of improved methods. The summary of application scenarios focuses on static and dynamic environments, and will further cover the more extensively studied extreme or special conditions in the future. In summary, UAV obstacle avoidance based on APF methods is an effective path planning method, but in practical applications, various factors need to be considered comprehensively to achieve practical utility.
References
[1]. Wu Jianfa, Wang Honglun, Liu Yiheng, et al 2020 A review of research on drone obstacle avoidance route planning methods. Unmanned System Technology, 3(1), pp.1-10.
[2]. hubhani Aggarwal and Neeraj Kumar. 2020 Path Planning Techniques for Unmanned Aerial Vehicles: A Review, Solutions, and Challenges. Computer Communications, vol. 149, Jan. 2020, pp. 270-299.
[3]. Waschi, H. Wang, M. Cao, H. Jiang and L. Xie, 2018 Feasible Computationally Efficient Path Planning for UAV Collision Avoidance, IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 2018, pp. 576-581.
[4]. LIU Xuanbing, ZHOU Shaolei, XIAO Zhicai, et al 2022 Review on UAV obstacle avoidance methods Journal of Ordnance Equipment Engineering, ,43(05):40-47.
[5]. Liu Chengli. 2021 Research status and prospects of drone obstacle avoidance control. Science and Technology Shangpin, (4): 97-98.
[6]. L. Keyu, L. Yonggen and Z. Yanchi 2020 Dynamic obstacle avoidance path planning of UAV Based on improved APF 5th International Conference on Communication, Image, and Signal Processing (CCISP), Chengdu, China, pp. 159-163.
[7]. Y. Koren and J. Borenstein 1991 Potential field methods and their inherent limitations for mobile robot navigation, Proc. IEEE Conf. Robotics and Automation, Sacramento, CA, Apr. 7–12, pp. 1398–1404.
[8]. Y. Koren and J. Borenstein 1991 Potential field methods and their inherent limitations for mobile robot navigation, Proc. IEEE Conf. Robotics and Automation, Sacramento, CA, Apr. 7–12, pp. 1398–1404.
[9]. Ge S S,Cui Y J 2002 Dynamic motion planning for mobile robots using potential field method, Autonomous Robots, ,13 (3): pp.207-222.
[10]. Palmieri, Luigi. 2015. A behavioural approach to obstacle avoidance for mobile manipulators based on distributed sensing. ArXiv, abs/1502.02465.
[11]. Cao L,Qiao D,Xu J 2018 Suboptimal artificial potential function sliding mode control for spacecraft rendezvous with obstacle avoidance, Acta Astronautica, 143:pp.133-146.
[12]. Luo G,Yu J,Mei Y,et al. 2015 UAV path planning in mixed- obstacle environment via artificial potential field method improved by additional control force. Asian Journal of Control, 17(5):pp.1600-1610.
[13]. Sullivan J,Waydo S,Campbell M. 2003 Using stream functions for complex behavior and path generation. AIAA Guidance, Navigation and Control Conference and Exhibit.
[14]. Waydo S,Murray R M. 2003 Vehicle motion planning using stream functions. IEEE International Conference on Robotics and Automation.
[15]. Y. Liu and Y. Zhao, A virtual waypoint based artificial potential field method for UAV path planning, 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, pp. 949-953.
[16]. L. Dongcheng and D. Jiyang, 2020 Research on Multi-UAV Path Planning and Obstacle Avoidance Based on Improved Artificial Potential Field Method, 2020 3rd International Conference on Mechatronics, Robotics and Automation (ICMRA), Shanghai, China, pp. 84-88
[17]. A. Ma’Arif, W. Rahmaniar, M. A. M. Vera, A. A. Nuryono, R. Majdoubi and A. Çakan 2021 Artificial Potential Field Algorithm for Obstacle Avoidance in UAV Quadrotor for Dynamic Environment, 2021 IEEE International Conference on Communication, Networks and Satellite (COMNETSAT), Purwokerto, Indonesia, pp. 184-189
[18]. J. Sun, J. Tang and S. Lao, Collision Avoidance for Cooperative UAVs With Optimized Artificial Potential Field Algorithm, IEEE Access, 2019, vol. 5, pp. 18382-18390
[19]. Y. Du, X. Zhang and Z. Nie 2019 A Real-Time Collision Avoidance Strategy in Dynamic Airspace Based on Dynamic Artificial Potential Field Algorithm, IEEE Access, vol. 7, pp. 169469-169479.
[20]. O. Khatib, Real-time obstacle avoidance for manipulators and mobile robots, Proceedings. 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, pp. 500-505.
[21]. R. L. Galvez et al. 2017 Obstacle avoidance algorithm for swarm of quadrotor unmanned aerial vehicle using artificial potential fields, TENCON 2017 - 2017 IEEE Region 10 Conference, Penang, Malaysia, pp. 2307-2312.
[22]. Lan Yubin, Wang Linlin, Zhang Yali, 2018 Application Status and Prospects of Obstacle Avoidance Technology for Agricultural Drones, Transactions of the Chinese Society of Agricultural Engineering Vol. 34 No. 9, p104-113.
[23]. Shubhani Aggarwal, Neeraj Kumar, 2020 Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges, Computer Communications, Volume 149, pp.270-299.
Cite this article
Xing,H. (2023). Review of unmanned aerial vehicle obstacle avoidance planning based on artificial potential field. Applied and Computational Engineering,10,55-63.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2023 International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Wu Jianfa, Wang Honglun, Liu Yiheng, et al 2020 A review of research on drone obstacle avoidance route planning methods. Unmanned System Technology, 3(1), pp.1-10.
[2]. hubhani Aggarwal and Neeraj Kumar. 2020 Path Planning Techniques for Unmanned Aerial Vehicles: A Review, Solutions, and Challenges. Computer Communications, vol. 149, Jan. 2020, pp. 270-299.
[3]. Waschi, H. Wang, M. Cao, H. Jiang and L. Xie, 2018 Feasible Computationally Efficient Path Planning for UAV Collision Avoidance, IEEE 14th International Conference on Control and Automation (ICCA), Anchorage, AK, USA, 2018, pp. 576-581.
[4]. LIU Xuanbing, ZHOU Shaolei, XIAO Zhicai, et al 2022 Review on UAV obstacle avoidance methods Journal of Ordnance Equipment Engineering, ,43(05):40-47.
[5]. Liu Chengli. 2021 Research status and prospects of drone obstacle avoidance control. Science and Technology Shangpin, (4): 97-98.
[6]. L. Keyu, L. Yonggen and Z. Yanchi 2020 Dynamic obstacle avoidance path planning of UAV Based on improved APF 5th International Conference on Communication, Image, and Signal Processing (CCISP), Chengdu, China, pp. 159-163.
[7]. Y. Koren and J. Borenstein 1991 Potential field methods and their inherent limitations for mobile robot navigation, Proc. IEEE Conf. Robotics and Automation, Sacramento, CA, Apr. 7–12, pp. 1398–1404.
[8]. Y. Koren and J. Borenstein 1991 Potential field methods and their inherent limitations for mobile robot navigation, Proc. IEEE Conf. Robotics and Automation, Sacramento, CA, Apr. 7–12, pp. 1398–1404.
[9]. Ge S S,Cui Y J 2002 Dynamic motion planning for mobile robots using potential field method, Autonomous Robots, ,13 (3): pp.207-222.
[10]. Palmieri, Luigi. 2015. A behavioural approach to obstacle avoidance for mobile manipulators based on distributed sensing. ArXiv, abs/1502.02465.
[11]. Cao L,Qiao D,Xu J 2018 Suboptimal artificial potential function sliding mode control for spacecraft rendezvous with obstacle avoidance, Acta Astronautica, 143:pp.133-146.
[12]. Luo G,Yu J,Mei Y,et al. 2015 UAV path planning in mixed- obstacle environment via artificial potential field method improved by additional control force. Asian Journal of Control, 17(5):pp.1600-1610.
[13]. Sullivan J,Waydo S,Campbell M. 2003 Using stream functions for complex behavior and path generation. AIAA Guidance, Navigation and Control Conference and Exhibit.
[14]. Waydo S,Murray R M. 2003 Vehicle motion planning using stream functions. IEEE International Conference on Robotics and Automation.
[15]. Y. Liu and Y. Zhao, A virtual waypoint based artificial potential field method for UAV path planning, 2016 IEEE Chinese Guidance, Navigation and Control Conference (CGNCC), Nanjing, China, pp. 949-953.
[16]. L. Dongcheng and D. Jiyang, 2020 Research on Multi-UAV Path Planning and Obstacle Avoidance Based on Improved Artificial Potential Field Method, 2020 3rd International Conference on Mechatronics, Robotics and Automation (ICMRA), Shanghai, China, pp. 84-88
[17]. A. Ma’Arif, W. Rahmaniar, M. A. M. Vera, A. A. Nuryono, R. Majdoubi and A. Çakan 2021 Artificial Potential Field Algorithm for Obstacle Avoidance in UAV Quadrotor for Dynamic Environment, 2021 IEEE International Conference on Communication, Networks and Satellite (COMNETSAT), Purwokerto, Indonesia, pp. 184-189
[18]. J. Sun, J. Tang and S. Lao, Collision Avoidance for Cooperative UAVs With Optimized Artificial Potential Field Algorithm, IEEE Access, 2019, vol. 5, pp. 18382-18390
[19]. Y. Du, X. Zhang and Z. Nie 2019 A Real-Time Collision Avoidance Strategy in Dynamic Airspace Based on Dynamic Artificial Potential Field Algorithm, IEEE Access, vol. 7, pp. 169469-169479.
[20]. O. Khatib, Real-time obstacle avoidance for manipulators and mobile robots, Proceedings. 1985 IEEE International Conference on Robotics and Automation, St. Louis, MO, USA, pp. 500-505.
[21]. R. L. Galvez et al. 2017 Obstacle avoidance algorithm for swarm of quadrotor unmanned aerial vehicle using artificial potential fields, TENCON 2017 - 2017 IEEE Region 10 Conference, Penang, Malaysia, pp. 2307-2312.
[22]. Lan Yubin, Wang Linlin, Zhang Yali, 2018 Application Status and Prospects of Obstacle Avoidance Technology for Agricultural Drones, Transactions of the Chinese Society of Agricultural Engineering Vol. 34 No. 9, p104-113.
[23]. Shubhani Aggarwal, Neeraj Kumar, 2020 Path planning techniques for unmanned aerial vehicles: A review, solutions, and challenges, Computer Communications, Volume 149, pp.270-299.