







1. Introduction
Against the backdrop of profound changes in the global population structure in the 21st century, population aging has become an irreversible and significant trend. Along with this trend, new types of elderly care models such as “group-based elderly care” and “community mutual assistance elderly care” have emerged increasingly, reflecting society's higher pursuit of the quality of life and dignity of the elderly population. However, whether it is home-based, community-based, or institutional elderly care, the health maintenance of the elderly population especially the rehabilitation process after the impairment of mobility due to aging, illness, or accidents such as falls is facing increasingly severe challenges. This has led to a sharp increase in the market demand for specialized, intelligent, and accessible elderly rehabilitation medical devices.
Within this extensive demand blueprint, rehabilitation robot technology, with its advantages such as high precision, quantifiability, strong repeatability, and the ability to reduce the burden on therapists, demonstrates significant application potential and irreplaceable value. Such technology can not only provide scientific and standardized rehabilitation training, accelerating the process of functional recovery, but also offer necessary daily activity assistance to the elderly with mobility issues, effectively enhancing their self-care ability and independence. However, the current high-end rehabilitation robots on the market are often expensive, have complex structures, and involve high operation and maintenance barriers, making it difficult to achieve widespread application in grassroots communities, families, and resource-limited elderly care institutions. As a result, their considerable social value has not been fully realized.
Experience gained through participation in robotics competitions such as FRC, combined with the study of mechanical control algorithms, underscores the potential of technology in addressing practical problems. Moreover, witnessing the long and arduous rehabilitation process of elderly individuals following illness highlights the urgent societal need for practical rehabilitation assistance devices such as rehabilitation robots.
Based on this background and motivation, the present research focuses on developing a simply structured and cost-controllable rehabilitation robot solution. After in-depth analysis, the crank-slider mechanism was selected as the core component due to its compact structure, clear reciprocating linear motion characteristics capable of simulating basic rehabilitation actions and low manufacturing cost. The aim of this study is to conduct a detailed design and analysis of a rehabilitation robot based on the crank-slider mechanism, covering aspects such as mechanism innovation and performance verification. It strives to explore a technical path that integrates engineering practicality with theoretical depth, thereby providing useful references for alleviating the shortage of rehabilitation resources for the elderly and improving the accessibility of rehabilitation services
2. Background
The invention of rehabilitation robots originated in the UK, and then research on them gradually began in various parts of Europe and America around the 1980s [1]. Based on the core principle that "the central nervous system has high plasticity", people hope that these rehabilitation robots, by assisting patients in repetitive and standardized training, can help neurotraumatized patients restore limb functions. Their overall goal is to replace or assist rehabilitation therapists and simplify the cumbersome traditional "one-on-one" treatment process. Early rehabilitation robots were mostly single-degree-of-freedom, with representative products including the NUSTEP rehabilitation device from the United States and the THERA-Vital intelligent rehabilitation trainer from Germany, etc. After the 2000s, multi-degree-of-freedom traction/hanging rehabilitation robots with more functions and higher automation levels, such as the Armeo and Lokomat from Switzerland, and LokoHelp from Germany, have gradually become the mainstream [2,3]. As for the currently most widely known exoskeleton-type rehabilitation robot, it was introduced in the early 1960s [4].
Currently, the global market for rehabilitation robots is experiencing a high speed of increase. In 2015, it was approximately 577 million US dollars, and rapidly reached 1.73 billion US dollars by 2020, with a compound annual growth rate of 24.51% [5]. Due to the earlier start of the rehabilitation robot industry in developed countries in Europe and America, the high-end rehabilitation robot market is dominated by brands from these regions, almost monopolized. Though started quite late, in recent year the local rehabilitation robot-related industries in China are also booming driven by factors such as the increasing demand caused by the aging population and the huge talent gap in the rehabilitation therapist industry. In 2023, the market size of rehabilitation robots in China exceeded 2 billion US dollars, and the annual growth rate of the rehabilitation robot market in China from 2023 to 2024 exceeded 50% [6].
Rehabilitation robots are classified according to their service scope into upper limb rehabilitation robots and lower limb rehabilitation robots. For instance, Armeo from Switzerland is an upper limb rehabilitation robot, while Lokomat is a lower limb rehabilitation robot. Furthermore, rehabilitation robots are classified based on their mode of operation, and they can be divided into active rehabilitation robots (where the machine is responsible for movement and the patient's limbs are relaxed) and passive rehabilitation robots (where the machine assists with movement and the patient actively exerts force). Among them, lower limb passive rehabilitation robots are more commonly used in medical settings, typically for assisting paralyzed patients in practicing walking and other activities. However, during actual treatment, medical staff often consider multiple factors (the patient's body structure, the severity of symptoms, the therapeutic stage, cost, etc.) and combine the use of multiple rehabilitation robots to help patients recover.
The process of paralysis recovery training usually requires repetitive linear movements or specific plane trajectories for rehabilitation actions. Considering this, designing a rehabilitation robot using the crank-slider mechanism takes advantage of its simple structure, reliable operation, convenient manufacturing, and low cost, making it a technical path focused on high cost-effectiveness and easy promotion. Moreover, considering the motion characteristics of the crank-slider rehabilitation robot mechanism, it is particularly suitable for certain upper limb extension and flexion, and ankle plantar flexion and dorsiflexion training. A technical achievement from the Technology Transfer Center of Changchun University of Technology "The End-Position Guiding Rehabilitation Robot Based on Crank-Slider Mechanism Structure" utilizes the crank-slider mechanism to drive the handle to move in the slide track, thereby guiding the patient's upper limbs for rehabilitation training.
3. Main content
The core functional requirements of the rehabilitation robot system analyzed in this article are to precisely simulate the flexion and extension movements of the human hand, and it must meet the requirement of covering the main range of motion of human joints through the joint angles. At the same time, the rehabilitation robot mechanism also needs to provide controllable movement speed and assist/resistance torque to provide different degrees of assistive movement effects, thereby meeting the needs of patients at different rehabilitation stages.
To achieve this function, this design selects the crank-slider mechanism as the core transmission scheme. Besides its simple and stable structure with low cost and ease of adjustment, this mechanism can convert the rotational motion of the motor into the linear reciprocating motion at the execution end. This characteristic enables this mechanism to drive human limbs through accessories such as straps to perform flexion and extension, and realistically simulate the flexion and extension, as well as grasping movements of human fingers.
The core objective of this design is to create a robot model with a simple structure, controllable movement, and the ability to precisely reproduce the natural movement curves of human joints. The crank and connecting rod mechanism possesses all these advantages. In this mechanism, by adjusting the geometric parameters of the crank and connecting rod, different joint ranges of motion and movement characteristics can be matched, achieving the goal of closely fitting the actual condition of the user's body while realistically simulating hand movements, ensuring the safety and effectiveness of rehabilitation training. It can be seen that the crank and connecting rod mechanism is both controllable and very simple to adjust, making it a relatively excellent choice in this regard.
Next, will analyze the application of the crank-slider mechanism in the hand rehabilitation robot from three aspects: degree of freedom, motion modeling, and action curve fitting.
3.1. Degree of freedom analysis
Refer to the modeling of the crank-slider mechanism for the application in hand rehabilitation robots in the paper "Optimal Design of an End-Pulling Finger Rehabilitation Robot Mechanism" (The model design as shown in Figure 1), and choose to apply the Grubler formula for calculating the degree of freedom of planar mechanisms:
Grubler formula: F = 3(n-1) - 2J₁ - J₂
In this model, the number of components n = 4, the number of low pairs J₁ = 4 (three rotational pairs between the crank and the frame, the crank and the connecting rod, and the connecting rod and the slider, and one translational pair between the slider and the frame), and the number of high pairs J₂ = 0. Substituting into the formula gives:
![Figure 1. Schematic diagram of the mechanism applied to each finger [7].](https://file.ewadirect.com/press/media/markdown/document-image1_fULvHxE.png)
The result, F = 1, indicates that this structure can stably simulate the movement of the hand through the crank-slider mechanism, and that the application of the crank-slider mechanism in hand rehabilitation robots is feasible.
3.2. Kinematic model derivation
A coordinate system can be established with the rotation center of the crank as the origin:
Let the length of the crank be r, the length of the connecting rod be l, and the crank angle be θ (defined similarly to that in the literature).
Then, the position (displacement S) of the slider can be expressed as:
(where φ is the angle of the connecting rod, which can be related to θ through geometric relationships)
3.3. Terminal trajectory study
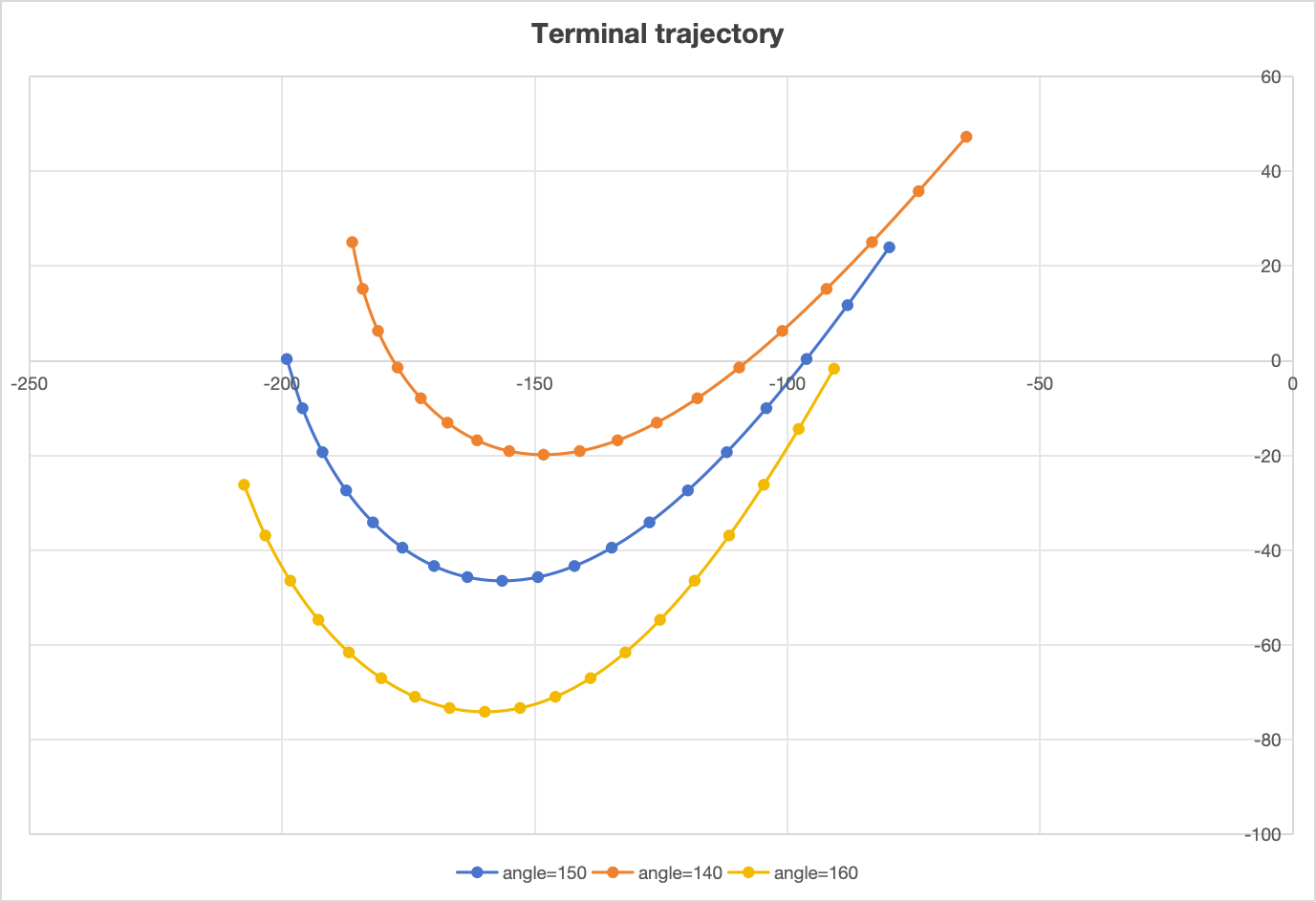
In the part of fitting the terminal trajectory images, the author chose Excel as the auxiliary tool for processing data and generating imagesn (Similar with Figure 2).
Among them, the constants include: The length of the crank l1 = 80; The length of the connecting rod l2 = 104; Offset e = 48; The length of the diagonal bar l3 = 160; Slider travel h = 120.
For the angle between the strut and the connecting rod, here use three different value to scratch the trajectory.
α = 140, 150 and 160, respectively.
Variables include:
β (crank angle)
δ (connecting rod angle)
x_D, y_D (end point coordinates)
l_4 (slider displacement)
Apply the formula to calculate:
Use the scatter plot to draw x_D and y_D, and obtain the end trajectory.
4. Challenges
In the research and design process of "rehabilitation robot based on crank-slider mechanism", I faced multiple challenges from academic, technical and psychological levels. Finally, under the careful guidance of my mentor and my personal unremitting efforts, I overcame these challenges and successfully completed the project, and finally achieved a significant improvement in my personal ability and scientific research quality.
First, at the academic and technical level, the core challenge lies in the theoretical depth of institutions and the complexity of engineering practice. As the key of the project, kinematic modeling needs to establish the mathematical relationship between the displacement, velocity and acceleration of the mechanism, which puts forward high requirements for my theoretical knowledge reserve and mathematical application ability. In the technical implementation, due to the unskilled operation of the multi-body dynamics simulation software, the initial model import, constraint addition and drive setting were repeatedly frustrated. At the same time, the selection of mechanism parameters is also quite difficult, and multiple objectives such as motion range, mechanical performance and structure compaction need to be repeatedly weighed. Any small change in the parameters may directly affect the rehabilitation effect and safety of the robot.
Secondly, on the psychological level, as a beginner in scientific research, the early stage is inevitably full of uncertainty and self-doubt. In the face of a complete and unguided scientific research process, from literature research, scheme design, modeling and simulation to final analysis and summary, I feel strange and lack confidence, and I feel uneasy about whether I can solve many problems emerging in the process independently.
Fortunately, my advisor gave crucial and inspiring guidance throughout the process. He did not give the answer directly, but guided me to sort out the internal logic of modeling, recommended classic institution textbooks and practical online tutorials, pointed out the direction for my autonomous learning, helped me to thoroughly understand the nature of these phenomena and their avoidance methods, and avoided design errors. Under the guidance of my mentor, I actively responded to these problems. After spending a lot of time reviewing academic papers and video tutorials, practicing modeling and tuning parameters by trial and error, my skills in these areas gradually went from rusty to proficient. In the end, I not only successfully completed the dynamic simulation of the mechanism, but also had a deeper understanding of the subtle effects of parameter changes on the output motion. This process has greatly exercised my autonomous learning ability, problem solving ability and rigorous engineering thinking.
Successfully overcoming these challenges not only enabled the project to move forward smoothly, but also enabled me to gain growth beyond the project itself and a more profound and systematic understanding of mechanical design, control algorithms and scientific research methods. I believe that these valuable knowledge and scientific research experience can lay a more solid foundation for my future academic research and engineering practice.
5. Conclusion
Through the practical process of designing and analyzing the rehabilitation robot based on the crank-slider mechanism, the practical research ability was significantly improved. By using dynamic simulation software and conducting formula calculations based on modeling, it became possible to create virtual prototypes and test the robot's movements, converting abstract formulas into intuitive and dynamic results. The process of setting optimization goals, analyzing simulation data, and repeatedly seeking the optimal solution greatly enhanced the problem-solving ability based on data.
However, the greatest gain from this project was the transformation of the perspective on scientific research. Before participating in this project, there existed a somewhat mysterious view of research, with the belief that to start a research project one must possess extremely extensive knowledge. But when actually involved in this project with the help of the instructor, it was realized that successful research is not as complex and profound as originally thought. In fact, it is entirely possible to break down complex problems into executable steps - conducting literature reviews, clarifying the problem, modeling, simulation, and verification. This project also made it clear that the real challenges often lie in patience and perseverance rather than knowledge depth. During the analysis process, it was often necessary to meticulously explore different approaches, debug the model, and interpret the results, especially when facing unexpected outcomes. This is a rigorous exploration process, not a test of talent.
Overall, the entire project experience from concept proposal to simulation verification has strengthened the confidence in dealing with complex engineering challenges. Seeing the satisfaction brought by a theoretical mechanism operating as expected in the simulation has reinforced the desire to continue researching and developing in the field of mechanics and engineering. In summary, this project provides a clearer and more practical map for the personal growth in the engineering field.
References
[1]. Jafari, B., Abadi, V., & Sadeghnejad, S. (2023). Rehabilitation robotics: History, applications, and recent advances. In B. Jafari, Handbook of robotic surgery: A practical guide(pp. 123-145).Elsevier. https: //doi.org/10.1016/B978-0-443-18460-4.00008-1
[2]. Atkinson, M., Tully, A., Maher, C. A., Innes-Wong, C., Russo, R. N., & Osborn, M. P. (2023). Safety, Feasibility and Efficacy of Lokomat® and Armeo®Spring Training in Deconditioned Paediatric, Adolescent and Young Adult Cancer Patients.Cancers, 15(4), 1250. https: //doi.org/10.3390/cancers15041250
[3]. Wang, Y., Zhang, P., & Li, C. (2023). Systematic review and network meta-analysis of robot-assisted gait training on lower limb function in patients with cerebral palsy.Neurological sciences : official journal of the Italian Neurological Society and of the Italian Society of Clinical Neurophysiology, 44(11), 3863–3875. https: //doi.org/10.1007/s10072-023-06964-w
[4]. Gopura, R. A. R. C., Bandara, D. S. V., Kiguchi, K., & Mann, G. K. I. (2016). Developments in hardware systems of active upper-limb exoskeleton robots: A review.Robotics and Autonomous Systems, 75, Part A, 92–110. https: //doi.org/10.1016/j.robot.2015.10.001
[5]. Research and Markets. (2015, January 9). Global rehabilitation robotics market 2015-2019 with AlterG, Ekso Bionics, Hocoma & Interactive Motion Technologies dominating [Press release]. https: //www.marketscreener.com/news/latest/Research-and-Markets-Global-Rehabilitation-Robotics-Market-2015-2019-with-AlterG-Ekso-Bionics-Hoc-19640743/
[6]. Zheng, Y. (2023, April 14). Medical rehab robots to embrace rapid growth.China Daily. Retrieved from https: //global.chinadaily.com.cn/a/202304/14/WS6438aafba31057c47ebba10c.html#: ~: text=A%20report%20from%20consultancy%20Frost%26%20Sullivan%20said%20the, estimated%20compound%20annual%20growth%20rate%20of%2057.5%20percent.
[7]. Wang, Z., Yao, H., Li, Z., He, J., & Deng, Y. (2025). Optimal Design of an End-Pulling Finger Rehabilitation Robot Mechanis [J/OL].Machinery Design & Manufacture. 1-7. https: //doi.org/10.19356/j.cnki.1001-3997.20250521.017.
Cite this article
Di,W. (2025). Design and analysis of rehabilitation robot based on crank-slider mechanism. Advances in Engineering Innovation,16(10),14-18.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Journal:Advances in Engineering Innovation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Jafari, B., Abadi, V., & Sadeghnejad, S. (2023). Rehabilitation robotics: History, applications, and recent advances. In B. Jafari, Handbook of robotic surgery: A practical guide(pp. 123-145).Elsevier. https: //doi.org/10.1016/B978-0-443-18460-4.00008-1
[2]. Atkinson, M., Tully, A., Maher, C. A., Innes-Wong, C., Russo, R. N., & Osborn, M. P. (2023). Safety, Feasibility and Efficacy of Lokomat® and Armeo®Spring Training in Deconditioned Paediatric, Adolescent and Young Adult Cancer Patients.Cancers, 15(4), 1250. https: //doi.org/10.3390/cancers15041250
[3]. Wang, Y., Zhang, P., & Li, C. (2023). Systematic review and network meta-analysis of robot-assisted gait training on lower limb function in patients with cerebral palsy.Neurological sciences : official journal of the Italian Neurological Society and of the Italian Society of Clinical Neurophysiology, 44(11), 3863–3875. https: //doi.org/10.1007/s10072-023-06964-w
[4]. Gopura, R. A. R. C., Bandara, D. S. V., Kiguchi, K., & Mann, G. K. I. (2016). Developments in hardware systems of active upper-limb exoskeleton robots: A review.Robotics and Autonomous Systems, 75, Part A, 92–110. https: //doi.org/10.1016/j.robot.2015.10.001
[5]. Research and Markets. (2015, January 9). Global rehabilitation robotics market 2015-2019 with AlterG, Ekso Bionics, Hocoma & Interactive Motion Technologies dominating [Press release]. https: //www.marketscreener.com/news/latest/Research-and-Markets-Global-Rehabilitation-Robotics-Market-2015-2019-with-AlterG-Ekso-Bionics-Hoc-19640743/
[6]. Zheng, Y. (2023, April 14). Medical rehab robots to embrace rapid growth.China Daily. Retrieved from https: //global.chinadaily.com.cn/a/202304/14/WS6438aafba31057c47ebba10c.html#: ~: text=A%20report%20from%20consultancy%20Frost%26%20Sullivan%20said%20the, estimated%20compound%20annual%20growth%20rate%20of%2057.5%20percent.
[7]. Wang, Z., Yao, H., Li, Z., He, J., & Deng, Y. (2025). Optimal Design of an End-Pulling Finger Rehabilitation Robot Mechanis [J/OL].Machinery Design & Manufacture. 1-7. https: //doi.org/10.19356/j.cnki.1001-3997.20250521.017.