






1. Introduction
Suppose
where we evolve
2. Preliminaries: properties of analytic functions
An analytic function (or holomorphic function) is a complex function that can be represented by a convergent power series in some neighborhood of every point in its domain. Formally, a function
where
•Differentiability: Analytic functions are infinitely differentiable in their domain.
• Power Series Representation: If a function is analytic, it has a Taylor series expansion around any point in its domain, converging to the function in some neighborhood.
• Cauchy-Riemann Equations: For
• Isolated Zeros: If
• Uniqueness Theorem: If two analytic functions agree on a set with an accumulation point, they are identical throughout their domain.
In this work, we will deal with zeroes of entire functions. One of the main results in this context is the Fundamental Theorem of Algebra. Next, we describe the necessary steps for its proof:
Theorem 2.1 (Liouville’s Theorem). If
Proof. Suppose
Taking
Theorem 2.2 (Fundamental Theorem of Algebra). Every non-constant polynomial
Proof. Assume for contradiction that
3. Polynomial deformation and root motion
Consider a polynomial
where
We follow the steps in Terecene’s Blog [1].
Example 3.1. (Quadratic Polynomial)
Take
The roots of
• For
• When
• For
3.1. Heat flow polynomials and their roots motion
Theorem 3.2 (explicit expression for heat deformation). An explicit expression for the heat flow deformation equation is:
Proof. The deformation conditions are:
with the initial condition
Inserting the knowing conditions, we get:
as desired.
Starting from
Theorem 3.3 (Mutual Effects between the real roots). Let
Proof. Using the fundamental theorem of Algebra, we can write the deformed polynomial as follows:
Take its first partial derivative with respect to z using product rule, we get:
Similarly, its second partial derivative with respect to z is:
Next, we insert
And we have four cases:
(1) If
(2) If
Thus,
Continue with the second partial derivative
Here we have the sum of
From combinatorial point of view, each term
is obtained by dropping out 2 chosen components
(3) If
(4) If
Thus,
At the beginning of this subsection, we used the chain rule and deformation assumptions to get the following implicit differentiation:
Therefore,
Corollary 3.4 (Attraction of real roots). Suppose there exist
then each term
Consider the case where we have only two roots,
If
In the general case, assume we have at least two distinct simple real roots. Define
For any
Moreover, if we remove either
3.2. Plot of root movement
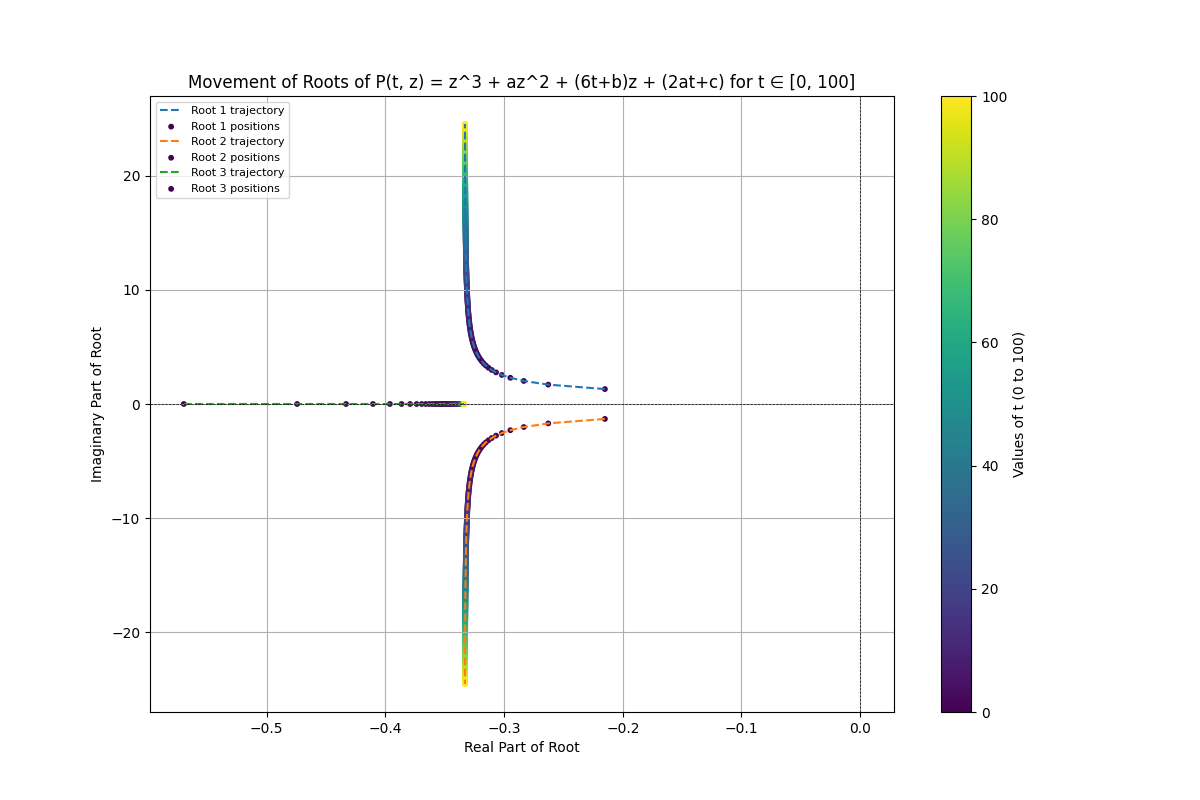
Figure 1 shows the movement of the roots of

3.3. Polynomial deformations and root movement
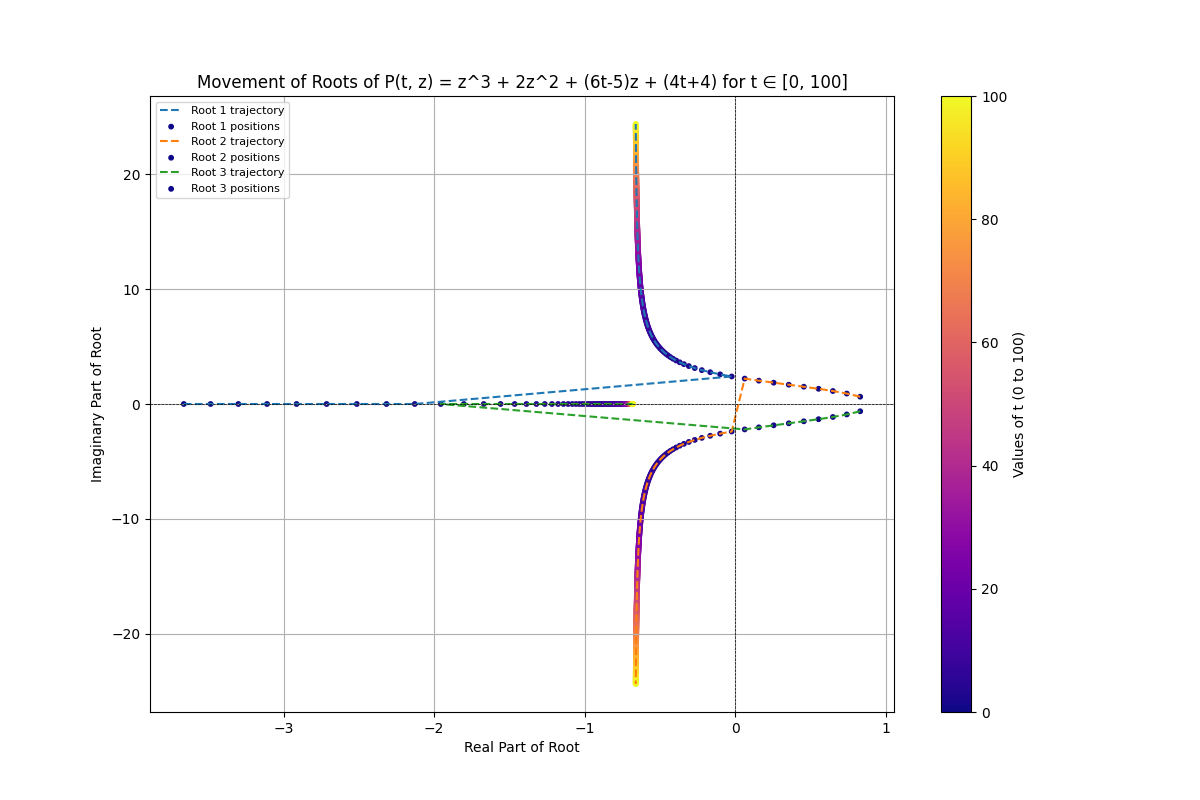
Using the heat flow equation, we explored how polynomial roots evolve under deformation. Three examples were analyzed and visualized:
3.3.1. Example 1: a quadratic polynomial
For
3.3.2. Example 2: a cubic polynomial
For
3.3.3. Example 3: extreme coefficients
The extreme case
3.4. Conclusion
The dynamic behavior of polynomial roots under heat flow provided intuition for complex deformations, while orthogonal polynomials showcased the depth of classical mathematical structures. Future work may involve extending these techniques to higher-degree polynomials or exploring numerical stability in root motion algorithms.
4. Exploring heat flow, orthogonal polynomials, and deformations of polynomials
4.1. Orthogonal polynomials: definitions and classical families. a weight function
Asequence of orhtogonal polynomials
Note that functions
•Hermite Polynomials: Orthogonal on
• Laguerre Polynomials: Orthogonal on
• Chebyshev Polynomials: Orthogonal on
4.2. Three-term recurrence relation and some consequences
Theorem 4.1. (Three-Term Recurrence Relation) Orthogonal polynomials
with
Remarks:
(1) For orthonormal polynomials, the recurrence relation becomes:
(2) If the orthogonality measure is even
(3) The recurrence relation determines the polynomials
(4) The orthogonality measure for a system of orthogonal polynomials may not be unique.
(5) If the orthogonality measure has bounded support, then it is unique. (Figure 3)
4.3. Zeros of orthogonal polynomials
Let
(1)
(2) The zeros of
4.4. Hermite polynomials
Definition 4.2. The Hermite polynomials
Proposition 4.3. (Orthogonality) Hermite polynomials are orthogonal on the interval
where
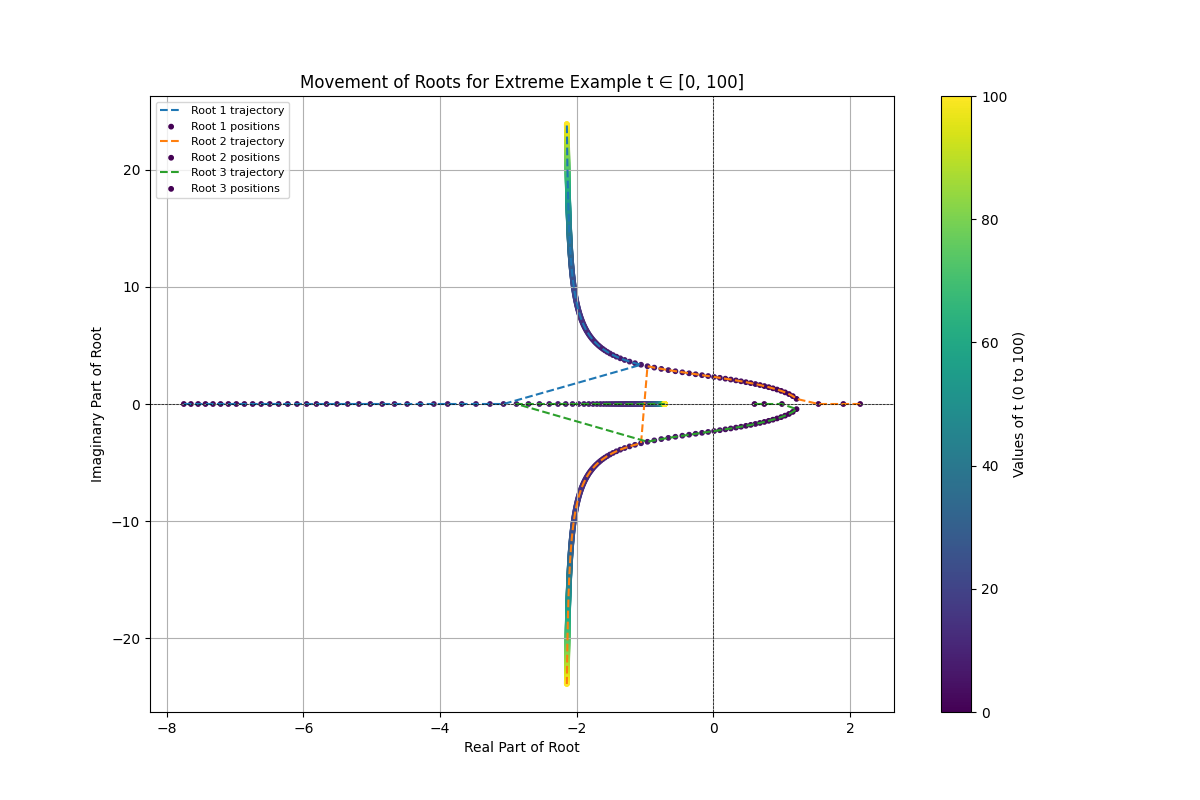
Figure 4 shows the movement of the Roots for Example 3 as mentioned in 3.3.3.
Proposition 4.4. (Recurrence Relation) The Hermite polynomials satisfy the following recurrence relation:
with initial conditions:
Proposition 4.5. (Generating Function) The generating function for Hermite polynomials is:
Proposition 4.6. (Other key properties)
• Symmetry:
• Differential Equation: Hermite polynomials satisfy the second-order differential equation:
• Explicit Formula:
• First derivative:
5. Deformation of hermite polynomial
5.1. Original hermite polynomials
The Hermite polynomials

5.2. Formula for Hermite polynomial after deformation
Theorem 5.1. The formula for Hermite polynomial of degree
Proof. We know the original formula for deformation is
By the property of Hermite polynomial we know
So we can claim that
We can prove it by induction, tha basic case we have shown before. So suppose it is true for
By induction hypothesis we have
By induction we have done.
5.3. Deformation even degree Hermite polynomial
By theorem 5.1 every even degree
Hermite polynomial can be written as this following form.
To prove the following lemma we need the definition of hypergeometric series and the relation between it and Hermite polynomial.
Definition 5.2. For natural number p and q the hypergeometric series is
where the Pochhammer symbol (rising factorial) is
And
And here is the formula to write Hermite polynomial by hypergeometric series, We won’t prove it here. Formal proof can be found in here: [2]
Theorem 5.3. Give Hermite polynomial of degree
Lemma 5.4. The following formula for even degree Hermite polynomial is true, Given s, a natural number
Where
Proof. By theorem 5.3 we know take
Notice that
Recall we know
Substitute
From lemma 5.4 we know if we consider
coefficient of
we know
Theorem 5.5. Denote
Proof. From lemma 5.4 we know
Here we denote
Notice that
Also notice that
For the same reason
Combine them together we have
And since
Then for
So it is true for all proper
Putting all together we have
Going back to the original formula for
By the equation of binomial form.
Actually we can write the result as another Hermite polynomial with different argument. Here is the corollary.
Corollary 5.6. Suppose
Proof. From prop 5.6 we know the explicit formula for
Denote
It is obvious all the degree of
From theorem 5.5 we know
Notice that
So
Notice that we know
Since it is true for every
5.4. Deformation odd degree Hermite polynomial and generalization
Now we know the formula in the even degree case, we can prove the odd degree case and get a general result.
Theorem 5.7. Given s natural number then the Hermite polynomial of odd degree after deformation is
Proof. The proof is using the induction on
Base:
We know
And
So the base case is true.
Hypo: For fixed s suppose the following is true
Step: By theorem 3.2 we know
Recall from Prop 4.4 we state the three terms recurrence relation of Hermite polynomial, so we know
By the general Leibniz rule
So
And we consider the right sum we have
Combine them together and by theorem 2.2 we have
Again by the three terms recurrence relation we know
Summary the even degree case and odd degree case we have the following result.
Lemma 5.8. Given
Proof. Simply using the result of Corollary 5.6 and Theorem 5.7
Corollary 5.9. The zero of the deformation polynomial is real iff t is smaller than 1/4. And if
6. Heat deformation of matrix value orthogonal polynomials
6.1. Introduction to matrix orthogonal polynomials
In this section we mainly introduce the matrix valued orthogonal polynomials. The main references for this section are [3-5] The ideal of the orthogonal polynomials is given a inner-product, we apply the Gram-Schmidt algorithm on the standard simple sequence of polynomials.
Definition 6.1. Matrix value polynomial A matrix valued polynomial P in the variable x of degree
where
Also notice that the polynomials don’t commute.
Definition 6.2. Matrix valued inner product A matrix valued inner product on the space of matrix valued polynomial
satisfies
(1)
(2)
(3)
Definition 6.3. An inner product is degenerate if
Definition 6.4. Simple sequence
(1)
(2) the leading coefficient of
It is obvious that any degree n matrix coefficient polynomial can be represented by sum of polynomials in a simple sequence.
Here is an example of inner product:
Example 6.5. For
where
The
6.2. Examples of deformed hermite polynomial
In the following section we have the following example as the weighted matrix
Example 6.6.
And the corresponding inner product is
The monic orthogonal polynomials
where
Proposition 6.7. For the
In the following, we apply the heat flow deformation on
Since we can derivative term by term so we have the equation for the deformed
6.3. Conjugation of the roots of deformed polynomial
Definition 6.8. For a matrix polynomial
The behavior of roots of the deformed polynomial

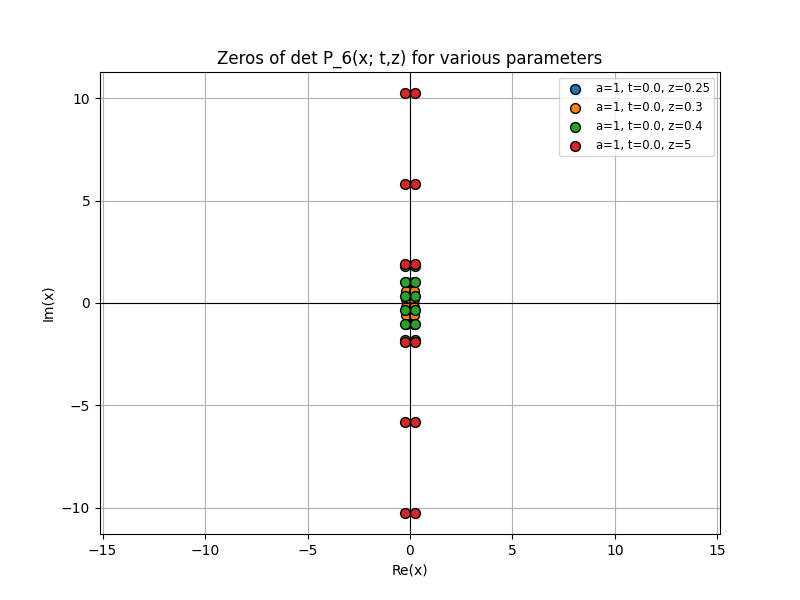
From Figure 6 and Figure 7, we can guess that each root has one more conjugate root with respect to the real part, and the absolute values of the real parts of the roots are very similar.
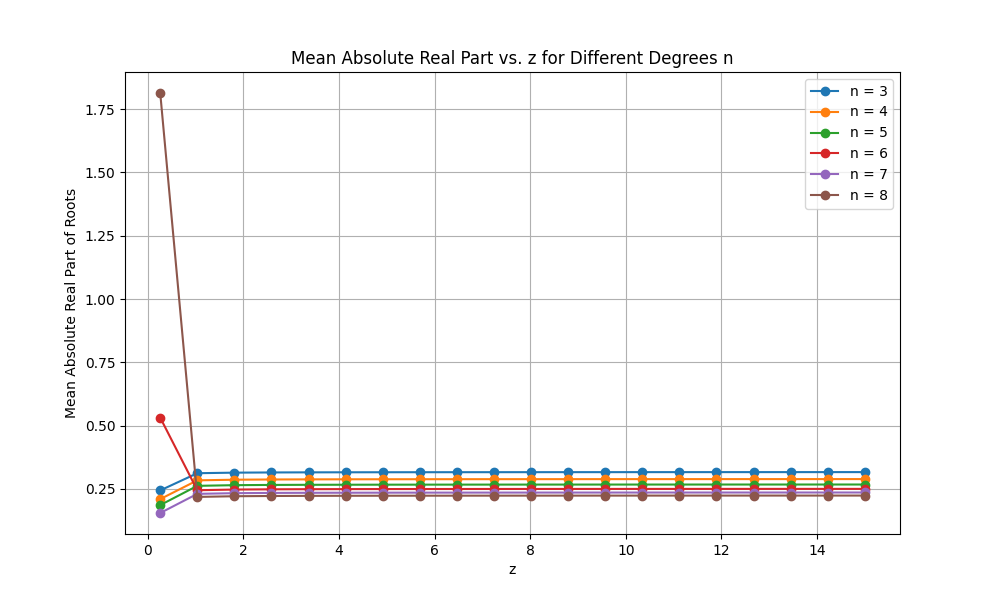
Also we found that the mean absolute real parts of all the roots in a fixed degree exhibit a kind of conjugation, as shown in Figure 8.
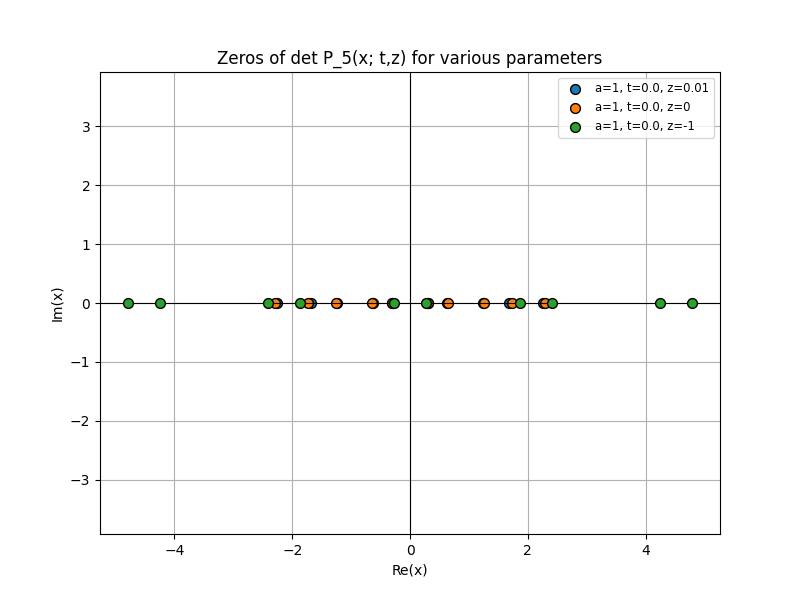
Also we can have a guess that if z is small enough then we have all real roots. Figure 9 is an example for
7. Conclusion
This study aimed to investigate how Hermite polynomials—both scalar and matrix‑valued—deform under the heat‑flow partial differential equation
This research contributes to the existing body of knowledge by unifying the PDE‑based deformation view with classical Hermite representations (including hypergeometric forms) and by giving a transparent, analytic derivation of the deformation formula that treats even/odd degrees in a single framework. The findings extend previous theories by providing evidence that the pairwise
This study has practical significance for spectral methods and numerical analysis. The closed-form scaling
This study is limited by its focus on the Hermite family and by analyzing one representative matrix weight; the matrix‑zero conjugation behavior is empirical here and not proved in full generality. One potential limitation is the assumption of simple zeros and reliance on local ODE analysis near the
Future study could focus on extending the analytic deformation law and zero dynamics to Laguerre, Jacobi/Chebyshev, and other classical families; establishing rigorous proofs of the matrix conjugation phenomenon; and deriving large‑n asymptotics for zero distributions under the
Overall, this study provides new insights into how heat flow interweaves with orthogonal polynomial structure—linking PDE evolution, explicit formulas, and zero dynamics—and highlights the importance of deformation‑invariant descriptions (scaling and interaction laws) as a unifying lens for both scalar and matrix‑valued settings. By shedding light on the interplay between diffusion, algebraic structure, and spectral geometry, this research paves the way for broader applications in approximation theory and computational mathematics.
References
[1]. Tao, T. (2017, October 17). Heat flow and zeroes of polynomials. What's New. https: //terrytao.wordpress.com/2017/10/17/heat-flow-and-zeroes-of-polynomials/
[2]. Tang, T. (1993). The Hermite spectral method for Gaussian-type functions.SIAM Journal on Scientific Computing, 14(3), 594–606.
[3]. Berg, C. (2008). The matrix moment problem. In A. J. P. L. Branquinho & A. P. Foulquié Moreno (Eds.), Coimbra lecture notes on orthogonal polynomials (pp. 1–58). Nova Science Publishers.
[4]. Damanik, D., Pushnitski, A., & Simon, B. (2008). The analytic theory of matrix orthogonal polynomials.Surveys in Approximation Theory, 4, 1–85.
[5]. Hahn, W. (1935). Über die Jacobischen Polynome und zwei verwandte Polynomklassen.Mathematische Zeitschrift, 39(1), 634–638. https: //doi.org/10.1007/BF01201380
Cite this article
Liu,J. (2025). An analytic way to prove the explicit formula for Hermite polynomial after heat flow deformation and observation in 3D dimensions. Advances in Operation Research and Production Management,4(3),35-52.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Journal:Advances in Operation Research and Production Management
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Tao, T. (2017, October 17). Heat flow and zeroes of polynomials. What's New. https: //terrytao.wordpress.com/2017/10/17/heat-flow-and-zeroes-of-polynomials/
[2]. Tang, T. (1993). The Hermite spectral method for Gaussian-type functions.SIAM Journal on Scientific Computing, 14(3), 594–606.
[3]. Berg, C. (2008). The matrix moment problem. In A. J. P. L. Branquinho & A. P. Foulquié Moreno (Eds.), Coimbra lecture notes on orthogonal polynomials (pp. 1–58). Nova Science Publishers.
[4]. Damanik, D., Pushnitski, A., & Simon, B. (2008). The analytic theory of matrix orthogonal polynomials.Surveys in Approximation Theory, 4, 1–85.
[5]. Hahn, W. (1935). Über die Jacobischen Polynome und zwei verwandte Polynomklassen.Mathematische Zeitschrift, 39(1), 634–638. https: //doi.org/10.1007/BF01201380