






1. Introduction
Rehabilitation medical robot has broad application prospects and has become a research hotspot of experts and scholars at home and abroad. Among them, lower limb rehabilitation medicine is the research hotspot of rehabilitation medicine. The number of patients with lower limb disability has increased dramatically, and walking inconvenience will affect patients' normal life [1]. Relevant medical equipment is in shortage, and efficient lower limb medical auxiliary equipment is needed. Exoskeleton technology is a new kind of human intelligent system control technology, which can be widely used in the master-slave control of robots and the medical rehabilitation aid of dismembered patients. With the shortage of medical staff and the improvement of patients' requirements for medical services, traditional artificial and rigid exoskeleton robots are challenging to meet the demand due to their heavy weight, low comfort and adaptability. As an important product of highly integrated human-machine technology in recent years, flexible lower limb exoskeleton (FLLE) robot can effectively assist personnel with limb injuries in carrying out active rehabilitation training and improve the autonomy and accuracy of patients' medical rehabilitation process. Lower limb flexible exoskeleton can reduce the burden of rehabilitation doctors, improve the efficiency and effect of rehabilitation training, obtain real-time rehabilitation training data, and evaluate the training effect.
At present, the lower limb flexible exoskeleton device has been widely applied in the medical field. Promote the functional recovery of the clinical efficacy research shows that the results of using an exoskeleton device for rehabilitation training is very significant to the improve walking ability, correct the hemiplegic gait, relieve muscle spasm and slow down the aspects such as osteoporosis and joint muscle contracture has a considerable effect [2].
Based on the current research status of the lower limb flexible exoskeleton rehabilitation robot, this paper will analyze its products, discuss the key technologies and predict its development direction.
2. Current research of FLLEs
2.1. Classification according to the driver system
According to the driving system, FLLE can be divided into several main types: motor drive, hydraulic drive, cylinder drive and pneumatic artificial muscle drive.
Table1. Driver system of FLLEs. | ||
Drive Method | Advantage | Disadvantage |
Motor drive | Simple, fast response, high control accuracy, easy maintenance and use | Heavy |
Hydraulic drive | High transmission power density, light, small in size, work smoothly | High energy loss, temperature-sensitive |
Cylinder drive | Simple, light, pollution-free, high reliability, low cost | Control signal transmission speed is low, serious pump driving noise |
Pneumatic artificial muscle drive | Flexible, no damage to operating object, light, large output, high energy conservation efficient, pollution-free, easy installation and maintenance | Small stroke, high-precision control is difficult |
2.2. Development overview
2.2.1. Sensing and control. At present, there are mainly the following control methods: the control method based on sensitivity amplification, the control method based on predetermined gait, the predetermined drive control method based on gait, and the hybrid control method. Among all kinds of coordinated control methods, the sensitivity amplification control strategy is the best for the load-bearing exoskeleton-assisted robot, while the predetermined gait control strategy is the most mature for the rehabilitation exoskeleton-assisted robot.
2.2.2. Clinical trials. To conduct clinical trials of flexible exoskeleton robotic products to evaluate their safety and effectiveness in medical rehabilitation. These trials involve testing the exoskeleton in a small number of patients under controlled conditions to assess its impact on gait, balance and other clinical outcomes.
2.3. Key technologies for development
There are currently four key technologies for soft exoskeleton robots, as follows:
2.3.1. Safety and reliability design
• System stiffness
Due to the elastic deformation of flexible cloth belts and steel wires, etc., the output displacement curve of the drive unit and the input displacement curve of the assisted joint of the lower limb are difficult to coincide, resulting in hysteresis effects. At the same time, the trajectory planning of the assisted device along the lower limb also affects the accuracy of the assisted system. Therefore, system stiffness directly affects the transmission efficiency and timeliness of auxiliary forces. Using high-stiffness flexible materials and conducting reasonable force transmission trajectory planning, and establishing an auxiliary force transmission model are necessary conditions for improving system stiffness.
• Bio mechanical requirements
Soft-assisted system needs to be compact in structure, light in weight, and have high mobility and force transmission efficiency. The human-machine wearing function can achieve alignment between the flexible body and the rotation center of the assisted joint. When designing the assisted system body, individual physical differences that cause human-machine wearing connection errors need to be considered. Based on the auxiliary force transmission model and belt width, studying changes in skin surface pressure in contact with belts during walking and controlling skin surface pressure within a comfortable range, as well as trajectory planning for assisted system bodies along lower limbs during assistance is of practical significance for achieving human-machine motion compatibility for soft-assisted systems.
2.3.2. Gait information detection technology. Detecting gait information during walking and obtaining lower limb joint motion intentions is an important basis for providing appropriate auxiliary forces to assisted joints at appropriate times.
Gait information detection technology mainly includes:
• Force sensing technology based on pressure sensors: By embedding pressure sensors inside shoe pads, detecting human-machine acting forces and ground support reaction forces on feet to obtain lower limb kinematic information.
• Attitude sensing technology based on inertial sensors: Usually multiple inertial sensors are arranged at various joints of the lower limbs to obtain real-time posture information of placement points. By establishing a human lower limb kinematics model, lower limb kinematic information is obtained.
• Surface electromyography (EMG) technology based on EMG: By attaching EMG sensors to human lower limb muscles, detecting the activity level of muscle groups related to assisted joints, performing more detailed detection and control of relevantmuscles in lower limbs, and recognizing and classifying different gait modes[3].
2.3.3. Driving method and control strategy. The driving method and control strategy directly affect the structural design, fixing methods, etc., and have a direct impact on the performance of soft-assisted robots. The driving methods are mainly electric motor drives and pneumatic drives. The corresponding control strategies are mainly divided into two types based on force signals and electromyographic signals.
2.3.4. Performance evaluation. In activities such as weight-bearing walking, continuous handling, and climbing stairs, measuring metabolic consumption, muscle activity, kinematics, and dynamics data of wearers through comparison analysis of relevant indicators is a common method for evaluating soft-assisted effects.
3. Analysis of existing products
At present, about 30 enterprises and research institutions worldwide have developed different types of lower limb flexible exoskeleton rehabilitation robots and put them into the market, and some products have been developed but not put into the market. In this paper, based on the technical innovation of flexible exoskeleton robot products and the degree of their flexibility, existing products are screened and representative products are analyzed:
|
|
| |
a) | b) | c) | |
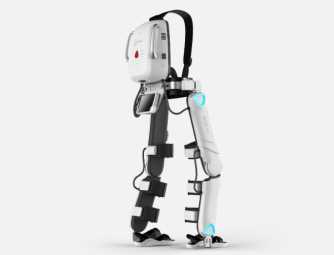
|
| Figure 1. Flexible lower limb skeleton. Soft ExoSuit. Walking Assist. Myosuit. d) BEAR-H1 e) ReStore Soft Exo-Suit | |
d) | e) | ||






3.1. Soft ExoSuit -- Wyss -- figure 1. a)
Developed by the Wyss Institute at Harvard University. It can boost the wearer's hip and ankle joints for medical applications such as stroke and multiple sclerosis, improving walking efficiency and comfort.
Soft ExoSuit uses a network of straps and anchor points to attach to the wearer's body and transfer power to the lower extremities. The power is transferred to the anchor point via Bowden wire in a motor-driven manner to assist the hip and ankle joints actively. The step adaptive control method is used to calculate the joint power and maintain the power output level. The exoskeleton weighs 6.5 kg, with the motor and battery weighing 5.4 kg and the tape and sensor weighing 1.1 kg. According to the estimation of human metabolism by measuring exercise oxygen consumption, the metabolic consumption of the user can be reduced by 14.88% when the user walks with weight, and 22.03% when the user does not wear the exoskeleton. The exoskeleton provides a maximum 80 N boost to the hip and ankle joints. [4]
Although the latest generation of Soft ExoSuit was released in 2018, Soft Exosuit's design philosophy and unique power assist solution have made it a standard for flexible exoskeleton products. Instead of rigid structures, Soft Exosuit's design solution uses flexible materials for power assist and leads the way in the development of lightweight exoskeleton technology.
3.2. Walking Assist -- Hondas -- figure 1. b)
Honda's Walking Assist is a lower limb flexible exoskeleton that assists the wearer's hip joint, improving gait and walking efficiency.
The use of simple lacing construction and size adjustable frame to suit different body types of users. The motor drive mode is adopted, and the hip joint is actively assisted by installing the motor and the wire rope in the waist. It adopts collaborative control technology and realizes coordinated movement with the wearer based on Honda's cumulative research on human walking.
Honda Walking Aid weighs 2.7kg(including battery), the motor output maximum torque of 4N · m, but only 60 minutes, only used for gait training recovery, not for daily exercise assistance and correction[5].
In 2015, Honda began leasing and selling its Walking Assist to Japanese companies. This is the most interesting exoskeleton in the world until 2022. Unfortunately, there is no more news about the product. But it is undeniably the simplest, smallest, lightest flexible exoskeleton robot to date that can effectively aid movement.
3.3. ReStore Soft Exo-Suit -- ReWalks -- figure 1. e)
ReStore Soft Exo-Suit provides ankle power to people with impaired walking ability after a stroke or brain injury. With a flexible lacing structure, Restore Soft Exo-Suit uses a combination of sensors and motors to provide active dorsiflexion and plantar power to the ankle by attaching motors and wire ropes to the waist and lower legs. According to the wearer's gait information and physiological signals, the power assist intensity and timing can be adjusted adaptively to achieve coordinated control with the wearer.[6]
The exoskeleton weighs 5 kg, including 4.5 kg for the motor and battery, and 0.5 kg for the straps and sensors. It provides a maximum boost of 30 N to the ankle joint.[7]
Wyss Institute and ReWalk Robotics have been working together since 2016, which is one of the factors that make the structure of ReStore Soft Exo-Suit so simple and effective, It is similar to the Wyss Soft ExoSuit drive and transmission solution, but the reduced size comes at the cost of reduced battery capacity, with the exoskeleton's battery life only lasting four hours of training.
3.4. Myosuits -- Figure 1. c)
Myosuit is designed primarily to enhance muscle strength and support to assist people with lower limb movement limitations in walking training or daily activities.Using a flexible lacing construction and a combination of motor and spring drive, the hip and ankle joints are actively flexed and extended by mounting a motor and wire rope at the waist and lower leg.
It works by simulating the function of an external muscle (exomuscle) through a closed-loop force controller to provide gravity compensation for the user [8], and is one of the most portable wireless devices available to provide gravity support for the user's hip and knee joints. However, the relevant clinical validation data are few, and the evaluation of its safety, effectiveness and reliability is still lacking [9].
3.5. BEAR-H1/BEAR-H2 -- s -- Figure 1. d)
BEAR-H1/BEAR-H2 is a lower limb flexible drive exoskeleton rehabilitation training robot developed by Shenzhen Maibu Robot Technology Co., LTD., which uses flexible driver as power output to improve the stability and accuracy of force control, improve safety and save energy consumption.[10]
BEAR-H series exoskeleton robot is the world's first exoskeleton robot with flexible actuator as power output. Flexible driver is a kind of driver that is different from rigid driver. Through mechanical structure, the driver shows certain flexibility, such as smoother motion, higher tolerance of error, etc. Flexible drivers are usually equipped with specific compliance control algorithms to achieve the goal of "flexibility" [11]. This product achieves the same safety and lower cost as a fully flexible exoskeleton robot. But at the cost of a lot more weight and no boost in power. Undeniably, such products can quickly produce a general model, which is simpler and cheaper for customers to customize their own products. It is a design scheme to adapt to the market.
3.6. Comparison
Compare some important properties of the above products:
Table2. Products Comparison. | ||||
Product | Time | Weight | Power assist | Treatment |
Soft ExoSuit | 2018 | 5.4kg | 80N | stroke; multiple sclerosis |
Walking Assist | 2015 | 2.7kg | 109N (Estimated value) | stroke; multiple sclerosis |
ReStore | 2019 | 5kg | 30N | Stroke; brain injury |
Myosuit | 2020 | 4.6kg | 230N (Maximum power) | muscle weakness |
BEAR-H | 2017 | 18kg | 30N (Maximum power) | nervous system diseases |
4. Outlook
The current application of the lower limb flexible exoskeleton in the rehabilitation and treatment of patients with neuromuscular or neurodegenerative diseases and neurotrauma is very active and effective; However, in the following areas, the lower limb flexible exoskeleton still needs to be improved or further research can make great progress:
• Fast processing of motion intention and mode recognition
Due to the high randomness of biological electromyographic signals, force sensing signals have hysteresis, which makes it challenging to obtain the accurate motion intention of the wearer. Moreover, more effective training strategies should be developed to train users' sports-assisted input models efficiently. Optimization of machine learning algorithms, such as human motion recognition neural network based on LSTM, can make products provide users with more targeted and personalized services.
• Improving portability
The heavy driving module of the flexible exoskeleton will affect the motion assistance effect of the equipment. The use of pneumatic muscles instead of, or in part instead of, conventional motors would reduce the weight of the device to some extent, or use energy-dense batteries to power the device.
• Safety and comfort
The current transmission mode has strong rigidity and low impact resistance of the material, which limits the wearer's movement comfort and flexibility. In order to realize the consistent movement of the exoskeleton and the wearer and minimize the interaction between the two, it is necessary to develop efficient and flexible transmission technology and structural design methods that meet the comfort of the wearer. Meanwhile, certain pretreatment of the motion input of the device can also reduce the possibility of accidental injury.
5. Conclusion
The flexible lower limb exoskeleton belongs to the new technology field. Existing studies have summarized the relevant techniques of FLLEs and evaluated the main features of some experimental lower limb flexible exoskeletons. In the structure, only some products completely use flexible materials, and the mainstream development direction is inclined to assist the rehabilitation of lower limb mobility difficulties caused by stroke, multiple sclerosis and other diseases. In the structure, only some products completely use flexible materials. Currently FLLEs is still in the exploratory stage, and there is still a lot of room for development in both software and hardware.
References
[1]. YANG Z 2017 Journal of Cardiovascular and Cerebrovascular Diseases of Integrated Traditional Chinese and Western Medicine. 15(19) 2407-2409
[2]. China Disabled Persons' Federation. 2021 Statistical Bulletin on Development of the Cause of Disabled Persons.
[3]. LI J, LI G, ZHANG L, YANG D and WANG H 2020 Acta Automatica Sinica 46(03) 427-4
[4]. ZHAO X, TAN X and ZHANG B 2020 Jiqiren/Robot 42(3) 365–384.
[5]. YANG C, PENG Z, XU L, YANG W 2021 Design of flexible knee-joint protection exoskeleton and walking assistance method. Journal of Zhejiang University(Engineering Science) 55(2) 213-221
[6]. FDA 2020 Summary ARGO ReWalk™ K131798 [EB/OL]
[7]. Awad L, Esquenazi A, Francisco, G et al. 2020 The ReWalk ReStore™ soft robotic exosuit: a multi-site clinical trial of the safety, reliability, and feasibility of exosuit-augmented post-stroke gait rehabilitation. J NeuroEngineering Rehabil 17, 80
[8]. Schmidt, K et al. 2017 The Myosuit: Bi-articular Anti-gravity Exosuit That Reduces Hip Extensor Activity in Sitting Transfers Frontiers in neurorobotics 11 57
[9]. Bartenbach, V et al 2015 Concept of a soft exosuit for the support of leg function in rehabilitation IEEE International Conference on Rehabilitation Robotics 2015–September pp. 125-130
[10]. X. Li et al. 2022 IEEE Robotics & Automation Magazine 29(3) 34-46
[11]. Duan W, Qin H, Liu R et al. 2023 Design and Performance Analysis of Reconfigurable Variable Stiffness Flexible Actuator Chinese Journal of Engineering Design 30 (2) 262-270
Cite this article
Wang,H. (2024). Flexible lower limb exoskeleton rehabilitation robot: A review. Applied and Computational Engineering,45,17-23.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. YANG Z 2017 Journal of Cardiovascular and Cerebrovascular Diseases of Integrated Traditional Chinese and Western Medicine. 15(19) 2407-2409
[2]. China Disabled Persons' Federation. 2021 Statistical Bulletin on Development of the Cause of Disabled Persons.
[3]. LI J, LI G, ZHANG L, YANG D and WANG H 2020 Acta Automatica Sinica 46(03) 427-4
[4]. ZHAO X, TAN X and ZHANG B 2020 Jiqiren/Robot 42(3) 365–384.
[5]. YANG C, PENG Z, XU L, YANG W 2021 Design of flexible knee-joint protection exoskeleton and walking assistance method. Journal of Zhejiang University(Engineering Science) 55(2) 213-221
[6]. FDA 2020 Summary ARGO ReWalk™ K131798 [EB/OL]
[7]. Awad L, Esquenazi A, Francisco, G et al. 2020 The ReWalk ReStore™ soft robotic exosuit: a multi-site clinical trial of the safety, reliability, and feasibility of exosuit-augmented post-stroke gait rehabilitation. J NeuroEngineering Rehabil 17, 80
[8]. Schmidt, K et al. 2017 The Myosuit: Bi-articular Anti-gravity Exosuit That Reduces Hip Extensor Activity in Sitting Transfers Frontiers in neurorobotics 11 57
[9]. Bartenbach, V et al 2015 Concept of a soft exosuit for the support of leg function in rehabilitation IEEE International Conference on Rehabilitation Robotics 2015–September pp. 125-130
[10]. X. Li et al. 2022 IEEE Robotics & Automation Magazine 29(3) 34-46
[11]. Duan W, Qin H, Liu R et al. 2023 Design and Performance Analysis of Reconfigurable Variable Stiffness Flexible Actuator Chinese Journal of Engineering Design 30 (2) 262-270