







1. Introduction
Nowadays the resources in the land have been fully developed, and it is hard for us to get into the further step to earn more. More and more countries focus on the development of the ocean. As a key technology, underwater communication has significant progress during the last half-century. Sound waves as carriers for underwater transmission of information do have advantages like lower attenuation and long transmission distance, however, they also show some limits, such as with the short bandwidth, the speed of the underwater acoustic communication has also been limited at a low level like Kbit/s. Moreover, the sound signal can also transfer at about 1500 meters per sound in the water, which means that it can not be used in real-time data transformation. So, researchers put their eyes on the Underwater Optical Wireless Communication, because this method has higher transfer speed, larger bandwidth, and little time delay. In some cases, the speed of it can even reach Mbit/s or even Gbit/s. Moreover, from Table 1, it can be seen that compared with traditional RF and UWAC methods, UWOC achieves a balance in many aspects and has unique characteristics in bandwidth, short distance communication, frequency bandwidth, signal attenuation rate, and delay level, making it suitable for specific underwater communication applications [1]
UWOC positioning technology is the foundation for UWOC systems to achieve target position capture, motion tracking, and trajectory prediction. Therefore, it is crucial to study UWOC positioning methods and effectively improve their accuracy. Due to terrestrial wireless communication and positioning technologies such as global. The Global Positioning System (GPS) and UWAC positioning technology cannot be directly applied to the UWOC system positioning, therefore, it is necessary to develop a new positioning solution that can effectively apply to the UWOC system to meet system requirements.
Table 1. Comparison of Three UWC Technologies. Current Status of Anti-interference Connection in Underwater Optical Wireless Communication at Home and Abroad
Data | RF | UWAC | UWOC |
Bandwidth | MHz | 1~100 kHz | 150 MHz |
Transmission distance | ≤10 m | >100 km | 10~150 m |
Frequency band | 30~300 Hz | 10~15 kHz | 5× 1014 Hz |
Rate of decay | 3.5~5 dB/m | 0.1~4.0 dB/km | 0~11 dB/m |
Delay level | Lower | High | Low |
In 1995, foreign scholars further analyzed LED-based underwater optical communication and found that it can reach a rate of 10 Mbps at 20m in theory. The Yale University research team in the United States developed an underwater optical communication system called AquaOptical II in 2010. The system uses a 470 nm high-power LED array device and discrete pulse interval modulation to successfully achieve communication of 2.28 Mbit/s at a distance of 50 meters, which is a breakthrough development in LED-based underwater optical communication.
In 2004, ANU University built a low-cost LED optical communication system with a transmission power of 3W and a transmission rate of 57.6Kbps
In 2005, Vasilescu. deng et al. completed an underwater network with a transmission rate of 512Kbps, and in 2007, built a hybrid distance communication system with a transmission distance of 9 meters and a data rate of 0.6Mbps under muddy water conditions。 [2]
The 2014 Nobel Prize in Physics recognized the contributions of physicists in inventing efficient and energy-saving blue LED light sources. They have manufactured blue light LEDs on high-quality gallium nitride crystals, which have high switching response speeds, making LED-based optical communication technology possible. In 1993, Hideyoshi Nakamura successfully increased the brightness of blue light LEDs significantly, which began to attract people's attention and opened the door to blue-green underwater LED communication.
In 2019, JXu et al. from Zhejiang University built a 21-meter system with a data rate of 312Mbps using a multi-pixel photon counter (MPPC) and a 2-QAM word system. In the same year, they built a 7-meter, 84Mbps system using solar panels as receivers.
2. Research status of UWOC positioning methods
The UWOC positioning method has many advantages compared to traditional underwater acoustic communication. The propagation of optical signals is very linear, which enables underwater optical communication positioning systems to provide higher accuracy position information. It is particularly important for tasks that require accurate measurement of the position of underwater equipment, such as deep-sea resource exploration and underwater surveying. Moreover, optical signals in underwater environments are usually not easily affected by the common multipath propagation, acoustic scattering, and underwater noise in underwater acoustic communication, making them less susceptible to eavesdropping or interference. In addition, the propagation speed of optical signals is faster than that of sound waves, so underwater optical communication can provide lower communication delay, which is very advantageous for real-time applications such as underwater robot operation. The most important thing is that optical communication is usually more environmentally friendly in underwater environments, as it does not have negative impacts on aquatic organisms and ecosystems, while acoustic communication may cause interference to marine ecology.
2.1. TOA positioning method
To obtain the measured distance d between known and unknown nodes, using TOA ranging technology requires ensuring clock synchronization. This means that it is necessary to measure the transmission time difference between the optical signal from the signal generator to the receiver Δ t. Then multiply it by the speed v at which the light signal propagates in water, as shown in the following equation (1):
d=v* Δ t(1)
The accuracy of the TOA ranging method requires strict clock synchronization, but in UWOC, the clock synchronization problem itself has certain difficulties. This difficulty may introduce some errors into TOA ranging, but relatively speaking, these errors are relatively small, thus achieving high-precision ranging. The principle of TOA ranging is shown in Figure 1.
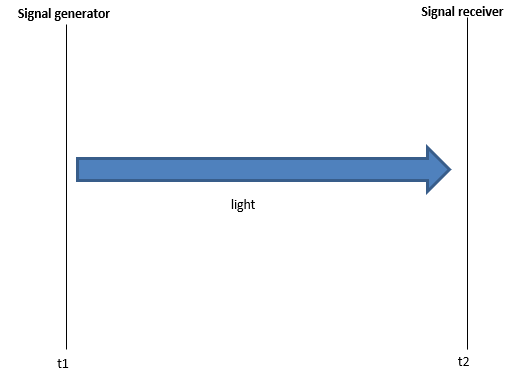
Figure 1. TOA ranging principal diagram
2.2. DTOA positioning method
To overcome the difficulty of dealing with clock synchronization in TOA ranging, we introduced the TDOA ranging method. In TDOA ranging, we utilize two different types of signals, namely optical and acoustic, with velocities v1 and v2, respectively. At one end of the signal generator, optical and acoustic signals with different speeds are simultaneously emitted, denoted by t1 and t2, respectively. When these two signals are received at the receiver, we can use the following formula to calculate the measurement distance between the two nodes without considering clock synchronization issues, so we can use formula (2) to calculate distance using time difference:
d= Δ t * v1 * v2/(v1- v2)(2)
Compared to TOA ranging, the TDOA ranging method does not require clock synchronization, but requires sending two different types of signals, which to some extent increases equipment costs and energy consumption. The principle of TDOA ranging is shown in Figure 2.
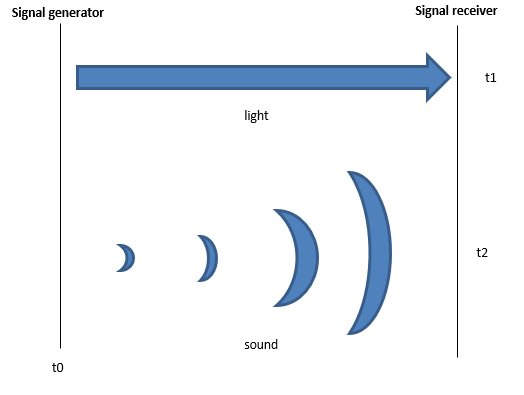
Figure 2. DTOA ranging principal diagram
2.3. RSS ranging
The RSS ranging method is based on the characteristic of optical signals decaying with increasing propagation distance in water and is used to measure the distance between unknown nodes and known nodes. When the transmission power of the optical signal, the attenuation of the optical signal power received by the receiver, the optical signal parameters, and the relevant parameters of the transmitting and receiving equipment are known, we can calculate the distance of the optical signal transmission, that is, the distance between the measurement nodes. According to the attenuation model of light propagation in water, such as the Beer Lambert channel model [32], the received power Pr of the receiver can be expressed as the equation (3):
Pr=Pt * lt * lr * exp (- e( λ) * D/cos θ) * Arcos θ / (2 π * d ^ 2 * (1- cos θ_0 )(3)
In the above formula, Pt represents the transmission power, lt represents the optical efficiency of the signal generator, and lr represents the optical efficiency of the receiver, λ Represents wavelength, e( λ) Is the attenuation coefficient, it is the absorption coefficient( λ) A and scattering coefficient( λ) The sum of b, which varies with the type and depth of water. D represents the distance between two nodes measured using the optical signal model RSS ranging method, θ Is the ballistic angle between two nodes, θ_0 is the divergence angle of the signal generator, and Ar is the aperture area of the receiver. These parameters are used to estimate the distance of the RSS ranging method.
The advantage of RSS ranging method is that the transmission and reception of signals only need to be completed through the communication module of the sensor device itself, without the need for additional equipment, which reduces network costs. However, underwater light signals are affected by absorption, scattering, and irregular signal attenuation caused by factors such as aquatic plants, turbulence, and bubbles. Therefore, compared to TOA and TDOA methods, the accuracy of RSS ranging is relatively low, and an accurate signal attenuation model is needed to improve ranging accuracy.
3. Research on UWOC Location Method
At present, the relevant literature based on UWAC positioning algorithm is relatively mature and complete, while there are relatively few related literature based on UWOC positioning algorithm. The relevant positioning technology is still in the early stage of development, and many aspects are still incomplete. There is limited research on high-precision positioning, and high-precision positioning algorithms are lacking, resulting in relatively lagging development. In [4], a UWOC module scheme that integrates ranging methods and two-dimensional positioning algorithms was proposed and partially implemented. By using photodiodes for distance estimation, and then using the detected photodiode's optical signal strength to calculate the two-dimensional relative position between nodes, this method significantly overcomes the challenges brought by complex underwater environments and effectively improves positioning accuracy.
What is more, the [5] In the positioning stage, the article introduces a positioning algorithm based on laser reception intensity. Unlike traditional received signal strength (RSS) algorithms, this intensity-based algorithm uses the distribution characteristics of the laser to determine the position of the target node, without the need for collaborative measurement of signal strength differences between multiple nodes. This algorithm usually only requires one node to send a laser and locate it by receiving light intensity. Unlike methods that require multiple nodes to collaborate with each other to measure the difference in signal strength, this reduces the complexity of communication and collaboration. No additional hardware devices or nodes are required to assist in positioning, therefore the cost is relatively low. It may be more suitable in certain underwater environments, especially in waters with good transparency. Another underwater node localization method is to use the generalized least squares method. This method first estimates the distance between nodes and then calculates the position of unknown nodes using the least squares method. Similarly, this method requires anchor nodes with known positions for distance estimation. This method can be applied to various underwater environments as it does not rely on specific sensors or signal propagation media. It usually provides relatively high positioning accuracy, especially when there are many anchor nodes with known position information.
The method based on light intensity may work better in waters with good transparency, but may be limited in deeper or less transparent waters. The generalized least squares method can work in different underwater environments, but usually requires more anchor nodes with known location information to provide higher accuracy. Therefore, selecting an appropriate positioning method should be considered based on the specific underwater environment and needs.
Although many related positioning technologies and solutions have been proposed, high-precision positioning algorithms for complex situations such as harsh underwater environments and moving target tracking are relatively lacking, and UWOC positioning still faces many difficulties and challenges.
4. The Challenges Faced by UWOC Positioning Technology
Multipath propagation: In underwater optical communication (UWOC) and acoustic communication, multipath propagation is a common and significant technical challenge. The main reason for this phenomenon is that sound waves and light in underwater environments propagate through multiple different paths, leading to the possibility that receiving nodes may simultaneously receive signals from different paths. This can cause a series of problems, including positioning errors, as well as delay and distortion of communication signals. Multipath propagation can have a negative impact on the localization process, as signals from different paths often have different propagation time delays and their signal strength may also vary. This may cause interference for nodes when calculating their own positions, as they need to consider signals on these multiple paths. If not properly handled, multipath propagation may lead to inaccurate positioning results, thereby reducing the accuracy and reliability of underwater node positioning systems
The variability of the underwater environment: The dynamic and constantly changing underwater environment is another challenge for UWOC positioning technology. Factors such as temperature, salinity, water quality, and ocean flow in the underwater environment may change over time and space. This change makes it difficult to accurately model the propagation characteristics of underwater acoustic and optical signals, as they are influenced by these environmental parameters. Therefore, the UWOC positioning system must be able to adapt to these environmental changes to ensure the accuracy and reliability of positioning. This may require the use of adaptive algorithms and sensors to monitor and compensate for these changes to improve positioning accuracy.
Limited energy: Underwater optical sensor nodes use battery devices as their power source, but the battery power is limited. It is extremely difficult to replace or recharge power devices such as batteries underwater. Once the batteries fail to supply power, the sensor will end its lifespan and cannot work. Therefore, researching localization algorithms that reduce energy loss and automatically collect energy to extend the lifespan of sensor networks is also a top priority for future work.
5. Peroration
This article mainly introduces the advantages and research status of UWOC networks compared to UWAC and RF, then discusses the types, related research, and difficulties faced by UWOC positioning technology. Through reading other literature, it was found that the main research achievements of relevant researchers currently focus on UWAC networks and UWAC based related technologies, while there are few research achievements on UWOC networks and UWOC based positioning technologies. At present, there are still many difficulties and challenges, such as environmental changes that make it difficult to accurately model the propagation characteristics of underwater acoustic and optical signals, signals from different paths that may interfere with nodes when calculating their own positions, energy limitations caused by difficult battery replacement of underwater optical sensors, and low dynamic positioning accuracy caused by node movement. Due to the unique advantages of fast propagation speed of optical signals, high data transmission rate, and excellent security, applications in underwater military and commercial systems are more reliable. The underwater positioning of optical signal communication has better real-time performance in fields such as external intrusion monitoring, target tracking, and trajectory prediction, which provides a positive driving force for related applications. The development of UWOC based node positioning technology with higher accuracy, stronger practicality, and wider applicability for particularly complex underwater environments has broad prospects.
References
[1]. Zhang Tengxiao, Qiu Yang. Positioning Technology for Underwater Wireless Optical Communication Systems [J/OL]. Optical Communication Research: 1-15 [2023-10-18].
[2]. Tao Yongsheng Research on Short Range High Speed Underwater Communication Technology Based on Optics [D]. Jiangsu University of Science and Technology, 2021. DOI: 10.27171/dc.cnki. ghdcc. 2020.000333
[3]. Ding Xinmin, He Wenqiang, Luo Zhonghua. Design of a positioning robot for visible light communication [J]. Application of Microcontrollers and Embedded Systems, 2023,23 (06): 45-47+73
[4]. Zhang D, Doye I N, Ballal T, et al. Localization and Tracking Control Using Hybrid Acoustic-optical Communication for Autonomous Underwater Vehicles [J]. IEEE Internet of Things Journal
[5]. He Qinglan Research on Key Technologies of Scanning and Positioning Based on UWOC [D]. University of Electronic Science and Technology,2020.DOI:10.27005/d.cnki. gdzku.2020.001530.
[6]. Liu Pengzhan, Wang Linning, Hu Fangren, et al. Research and Prospects of Underwater Optical Communication Technology [J]. Digital Ocean and Underwater Attack and Defense, 2022,5 (04): 329-334. DOI: 10.19838/j.issn.2096-5753.2022.04.008
Cite this article
Fu,Y. (2024). Overview of underwater optical wireless communication positioning based on signal processing. Applied and Computational Engineering,78,17-22.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Zhang Tengxiao, Qiu Yang. Positioning Technology for Underwater Wireless Optical Communication Systems [J/OL]. Optical Communication Research: 1-15 [2023-10-18].
[2]. Tao Yongsheng Research on Short Range High Speed Underwater Communication Technology Based on Optics [D]. Jiangsu University of Science and Technology, 2021. DOI: 10.27171/dc.cnki. ghdcc. 2020.000333
[3]. Ding Xinmin, He Wenqiang, Luo Zhonghua. Design of a positioning robot for visible light communication [J]. Application of Microcontrollers and Embedded Systems, 2023,23 (06): 45-47+73
[4]. Zhang D, Doye I N, Ballal T, et al. Localization and Tracking Control Using Hybrid Acoustic-optical Communication for Autonomous Underwater Vehicles [J]. IEEE Internet of Things Journal
[5]. He Qinglan Research on Key Technologies of Scanning and Positioning Based on UWOC [D]. University of Electronic Science and Technology,2020.DOI:10.27005/d.cnki. gdzku.2020.001530.
[6]. Liu Pengzhan, Wang Linning, Hu Fangren, et al. Research and Prospects of Underwater Optical Communication Technology [J]. Digital Ocean and Underwater Attack and Defense, 2022,5 (04): 329-334. DOI: 10.19838/j.issn.2096-5753.2022.04.008