







1 Introduction
This area, the region about DMFB, is a very active research area, and has been concerned by more and more researchers in recent years (Figure 1). And the area of routing algorithms that can be applied to help improve its automation (Figure 2) is also very important and being studied by many researchers, and many skills, that are previously used in other regions, are modified to solve this problem. For example, the algorithms that are used in robot obstacle avoidance, in maze routing and in PCB layout planning all have good reference values. The latest achievements in the field of computer science can also be applied to this problem, like machine learning and some advanced optimization methods. The routing of droplets in the DMFB can be solved by a divide-and-conquer method. This paper divides it into three parts and solve them in different stages.
Previous reviews do not divide problem and categorize the algorithms according to their functions, so, investigating them and classifying them according to their different characteristics is necessary. This paper includes data published in related paper, and make a comparison and statistics analysis on them. This paper will also include some discussion about their flexibility when sudden failure on the board happens. A good algorithm should have a good adaptive ability when the experiment procedure on the chip progress unsuccessfully, people can also consider it as the robustness of this method. By doing that, it can be helpful to build up new methods in the future.
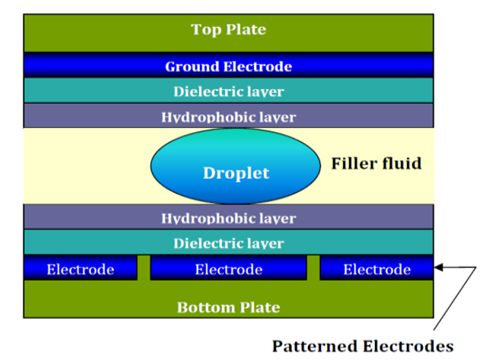
Fig. 1. The structure of DMFB [1]
The droplet is placed between two plates. By controlling the voltage of the electrodes, the droplet can be moved around. The filler fluid can reduce the resistant force against droplet movement and reduce liquid evaporation.
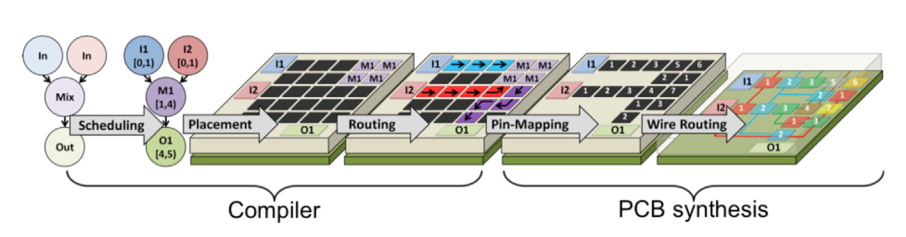
Fig. 2. A flowchart for turning experiment procedure into automated process on DMFB [12]
Experiment procedure is translated into modules like heating module, mixing module, optical detecting module and so on. First scheduling algorithm maps these modules into the board. Then routing algorithm guide droplets move around between modules.
To make a classification for existing routing algorithms for DMFB, this paper divides the algorithm into three parts. So, each part will be relatively independent. It will let beginners to intuitively understand the process of solving droplets’ routing problem and the passage will briefly cite their characteristics. Finally give a foresee for future development on droplet routing problems and predict which one will be more adaptable to practical situation.
2 Analysis on the problems of routing algorithms
This problem can be abstracted as transporting multiple droplets from the starting point to the destination point on the biochip concurrently. The starting point is where the droplet is injected. The destination point is functional module or waste reservoir. During the process, the droplets should avoid breaking the fluidic constraint and detour around the obstacles. Droplets can move around on the board or stay on a cell. Figure 3 displays several commonly used operational methods. Obeying liquid constraint is very important. Fluidic constraint means that two droplets cannot stay in neighboring cells when they are not going to be mixed, or it will incur contamination. There are two types of fluidic constraint, one is static fluidic constraint, the other is dynamic fluidic constraint. Static constraint means that when a droplet stays on position(x ,y)at time t, the surrounding eight position, (x-1, y), (x-1, y+1), (x-1, y-1), (x, y+1), (x, y-1), (x+1, y+1), (x+1, y), (x+1, y-1) cannot be occupied by other droplet. Dynamic constraint means that the next position the droplet is about to move to cannot be neighboring to the other droplet, or the electro-wetting force on the next cell will attract the two droplet and cause unwanted mixing. The details are shown in Figure 4. There are some modules placed on the biochip, prepared for droplet operation, like mixing, splitting, heating, optical detection and so on. They are observed as obstacles when routing droplets. During the process, droplets will move between the reservoirs and modules. By setting the start point, end point, and mixing point of a set of droplets, the algorithm should be able to give a solution to complete the plan. A minimal rectangular region that covers a droplet’s start point and end point called a net. Without mixing point it is a 2-pin net, while having two start points and a mixing point called a 3-pin net. This paper judges the quality of a routing algorithm by measuring the number of cells they use, the latest arrival time of the slowest droplet and the number of the cross-contamination they have (Figure 5). The last two index should be as small as possible, and the optimization direction of the first index depends on the hardware structure.
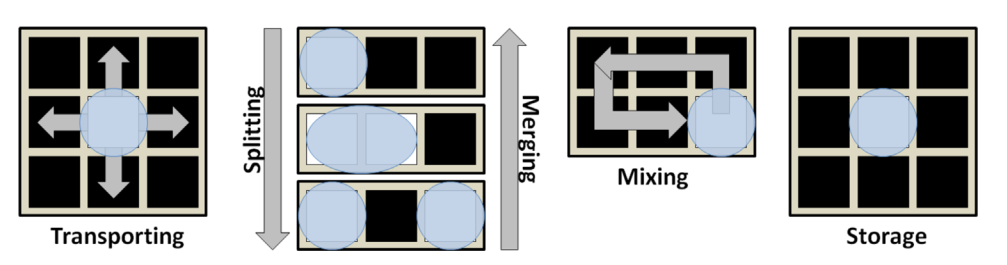
Fig. 3. Four basic operations for droplets on board [12]

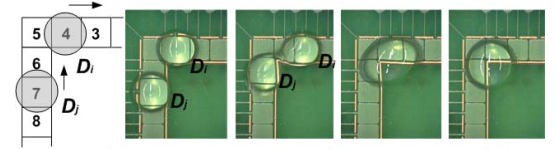
Fig. 4. Static fluidic constraint(left)and dynamic fluidic constraint (right) [11]
Static fluidic constraint (Figure 4) means that droplet A and droplet B cannot be in neighboring cells. Or they will touch each other and link up then become one big droplet.
Dynamic fluidic constraint means that on the next time step droplet A and droplet B cannot be in neighboring cells. If on the next time step, A is about to move to a neighboring cell of B, then the orange cell will be activated, and both A and B will be draw to it and mix.
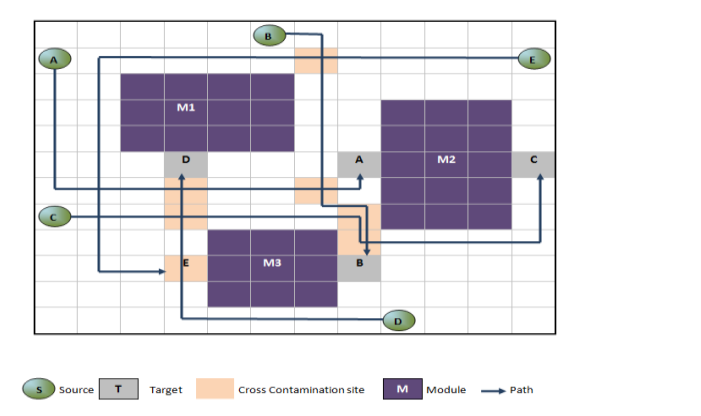
Figure 5. Cross contamination of different routes [1]
When a droplet goes through a sequence of cells, it will leave behind some liquid on the road. If a droplet’s path shares same cells with another droplet’s path. Then the droplet that comes later may be contaminated.
3 Solutions Classification
3.1 Algorithms for finding routes
Finding a route for every net is an essential step to solve this problem. There are many available route-finding algorithms out there. For example, in a paper, the author applies artificial swarm propagation algorithm to the droplet routing problem [1]. They first use route zone to define the bounding of every net. There is a concept called swarm propagation, from the beginning the wave is confined in route zone. In every net, one wave starts from the start point and the other wave starts from the destination point. As they propagate, numbers are labeled on the cells. When the two wave-front meet together, a process called backtracking starts and finally all the Manhattan routes are found. By using this method, they avoid unnecessary detours in routing. In another paper, a more delicate method is introduced [2].
The route-finding method is scheduled as three stages. Route estimation, route path selection and route implementation. First, they calculate the Euclidean distance of every net, and obtain the priority of each net according to that. And then they estimate road one by one according to the priority. Because the hardware structure here is MEDA, which allows droplet to go both straight and diagonally. Droplet’s size is also variable here. So, the shortest path here is not Manhattan routes, since it allows move diagonally. In route estimation part, the condition is categorized as three kinds, DUR, RHB and RWD. DUR (diagonal unbending routing) means the droplet can reach destinated point diagonally, that is, a shortest path is found and the estimated road part finishes. RHB (routing having breakpoint) means the diagonally search can only reach the destinated row or column, and at this time a break point is added. Then another search starts from the break point, and the search direction changed to moving straight. This procedure is repeated until destinated point is reached. If obstacles present, then the condition called RWD (routing with deviation). In this condition, apart from adding breakpoints, they add deviation when confront obstacle. So, it is RHB combined with deviation modifying.
Another diagonal search starts from the destination point can find possible alternated routes. By combination of all the route fragments, every net can be assigned with all possible paths. In terms of three-pin net, it is divided into three two-pin nets, and solve each of them by the same method. The search phase of RWD uses modified Hadlock routing algorithm, which is a maze routing algorithm similar to Lee algorithm. The route along diagonal cells has priority. Many people get inspiration from the VLSI circuit wiring algorithm. Lee algorithm and its revised version is broadly used in many papers. It can label number on the cells and find paths by back-tracking. In yet another paper, a very different and kind of random way of finding routes is presented [3]. First the solution begins with the start point and ends with the destination point. When deciding the next step, it considers the surrounding available cells and take a random choice as long as it satisfies the requirement that the next step has a shorter or same distance compared to last step. And there is a probability p that the next step is completely random, only if it satisfies fluidic constraint. If there is not a legal step on the next time slice, the droplet will stall and retreat a step. When the remaining distance exceed the required time, then this solution will be dropped, and the whole process is restarted. The solution refreshes by time slice. The priority of each net, which is assigned by the Manhattan distance, also varies with time. In another paper weight function is introduced to help solve this problem [4]. Similar to other papers, they assign priority to every net and route them in accordance with the order. At time t, there are five probable next steps for a certain droplet. Up, down, left, right and stall. To choose which of them depends on the condition of the last step. They construct a weight function to assign value to the next probable state and choose the one with the least weight. When a droplet reaches its destination at time t, we should further check that whether it will obstruct previous droplets when it stays on its destination point from time t to T (T stands for maximum allowed time limit). If it hinders previous droplets, then add an additional route for it to prevent that happens. If the routing of current net fail, then reroute this net or adjust the priority sequence, which will reschedule the net that cause most conflict. If that still fail then module placement will be reschedule.
3.2 Algorithm for avoiding breaking fluid constriction
After deciding all the paths, we should further check that whether they obey the fluidic constraint. There are many different ways to alter the paths so they will not violate fluidic constraint. For example, using back-tracking ways to find the path and then use deviation or alternative path to avoid conflict. Stalling the lower priority droplet can ease the “traffic jam” when many droplets need to go through a same cell. One droplet stall in a suitable place, and wait another droplet to pass. Usually, the droplet with longer distance from the destination point has higher priority. Detour is used to avoid obstacles on the way. If there are situations like conflict or dead-lock, a certain type of detour will be used. When planning roads for a droplet, we can also perceive other droplets as obstacle to solve the fluidic constraint. The cell occupied by other droplet and its surrounding eight cells becomes obstacles on this time slice and the next time slice [3]. In a paper “Modeling and controlling parallel tasks in droplet-based microfluidic systems”, the author repeatedly uses A* algorithm to plan a road for a specific droplet. The planning order is according to their priority. Since the droplet with higher priority has a definite road. while droplet with lower priority is moving, other droplets with higher priority are perceived as moving obstacles [5]. In paper "A New Homogeneous Droplet Transportation Algorithm and Its Simulator to Boost Route Performance in Digital Microfluidic Biochips”, the collision between droplets is solved by stalling the lower priority droplet. Detours are added when hard blockages are found [6]. Stall and detour are also used in paper “Efficient droplet router for digital microfluidic biochip using particle swarm optimizer” to solve conflicting condition. Stall is applied when two droplets enter conflicting area [7]. Detour is applied when two droplets’ paths overlap, at that time one droplet will choose an alternative road to come. This constraint problem also can be modeled as graph problem. When considering the nth droplet’s behavior at time t, we first add constraint conditions of previous planned droplets. Then adding new edge according to the behavior of the nth droplet. Finally consider whether we can still color the graph with the presence of a new edge [4].
3.3 Algorithm for optimizing outcomes
After scheduling the roads for every droplet and then make sure they all obey the fluidic constraints, we get a usable solution. For a specific problem, we then use optimization algorithms to find multiple solutions and choose the most competitive one. Some techniques called “state-of-art” methods, which means recognizing some situations and apply corresponding measures to help optimize the outcome. For example, in a paper “Bio-inspired Routing in DMFB: An Artificial Swarm Propagation Based Application” [1], they use separation and detour to slightly change the road to reduce cross-contamination. And the alignment measure can reduce the number of used cells. In another paper “A High-performance Homogeneous Droplet Routing Technique for MEDA-based Biochips” [2]. On estimation stage they fully consider all possible alternative path, so they will have plenty chances when they want to modify current path. For example, when multiple shortest paths exist, they will choose the one that have more shared cell. When they are dealing with conflict situation, they will compare the choice of adding stall or detour, and choose the one that can make arrival time shorter. In “A High-performance Homogeneous Droplet Routing Technique for MEDA-based Biochips” [2], there is a measure called compaction, it will consider the situation when two paths are adjacent. If it is not a friction situation, then apply shift, otherwise apply tentative shift, which is said to can increase the number of shared cells. In “A genetic algorithm for the routing of droplets in DMFB: Preliminary results” [3], the author use NSGA-II algorithm, which is a multi-objective optimization algorithm that can simultaneously optimize arrival time and number of cells. It is a genetic algorithm, which encodes the information of the solution of a set of droplets in the DNA. To reproduce the next generation, it includes cross over and mutation operators. So, the diversity of its descendant is guaranteed. Parents are selected by measure binary tournament. The illegal descendant (the one violates constraints) will be discarded. Generation after generation, the descendants will be optimized and better solution appears. Paper “CrossRouter: a droplet router for cross-referencing digital microfluidic biochips” optimizes the algorithm in regards of time [4]. They use incremental approach to reduce computational complexity of generating graph, thus reduce the time for computing solution. In “An optimization for online routing test based on particle swarm algorithm on DMFB” [8], this paper solves droplet routing problem based on a graph theory based mathematic model and apply PSO (particle swarm optimization) to it. In PSO, there is inertia value ω, it can balance the ability of local search and global search of this algorithm. The author comes up with an idea of adjusting the inertia value self-adaptively, which can avoid PSO to be caught in locally optimal solution and quickly converge. The passage also introduces the concept of commutator, which is said to can make algorithm converge faster and make the outcome road shorter. In paper “A method based on ant-colony algorithm for reducing contamination on Microfluid biochip” [9], the author uses MMAS (max-min ant system) to optimize the washing droplet’s paths to obtain shortest cleaning time. Washing droplet is introduced to DMFB to wash over some unavoidable cross-over contamination cells. Ants-colony optimization is an algorithm inspired by ants’ foraging behavior. Ants can communicate with each other by pheromone and thus find shorter way to food source. By finely alter the ways of encoding the problem’s parameter into the ants’ position, concentration of pheromone and heuristic information, we may apply similar algorithm to our droplet routing problems. All in all, we can either use “state of art” to separately handle specific situation and improve the quality of situation. Or we can use mature algorithms and build a suitable model to encode the problem’s parameter and the optimize targets into the model’s value, and then get a better solution.
4 Others
A novel and fancy way of solving this problem is by machine learning [10]. This paper aims to solve routing problem with the existence of degraded electrodes. In this paper, they use reinforce learning and generates a lot of random degraded electrodes on the board. They build Open AI Gym to train their model. The experiment conducting here is epigenetic bioassay, which includes 19 routing tasks, and AI successfully complete it. They use Markov decision processes (MDPs) on it. So, the routing problems become a series of decision-making problems. The AI will send an instruction to a droplet whether its next step should be up, down, right, or left. The AI will get rewards according to the feedback. After a large amount of training AI will be able to find the shortest path.
5 Conclusion
The routing of droplets is an interesting problem that draws the attention of many computer scientists. And DMFB is a very good platform to put the algorithm into practice. Furthermore, DMFB can help discover now drug for medicine uses because its characteristics of high throughput and automation, which will be very important considering that Covid-19 virus will exist for a long time. So, now that the stability of hardware structure of the biochip is more troublesome than designing a usable algorithm for routing droplets. We should first consider mature ways of generating paths to make sure that the possibility of erroneous is as small as possible. Therefore, traditional ways of finding routes will be better, like A* or lee algorithm. Considering practical problems, the optimization method should be one with less computation complexity to save computing time. In practice many accidents may happens on the board. For example, the electrodes or the hydrophobic layer may degrade or the material may breakdown. Sometimes if the board is not placed horizontally, the force of gravity may let droplets drift. And the evaporation of droplet may make it becomes smaller so it is not able to be driven by electrodes. After all, it is quite easy for a droplet to fail to move to its destination because of some hardware failure or unfortune fluctuation from the environment. These kinds of failure movement will be captured by the camera and adjustment to changes should be made by routing algorithm. So, the algorithm should have ability to adapt to new environment, or we just refresh the parameters and recalculate. And the optimized direction should be allowing more droplets to be moved concurrently with shortest latest arrival time and less cross-contamination.
Acknowledgements
Thanks to SUSTech, College of Engineering, and Material engineering department to allow me to have the opportunity to learn about DMFB and the great help of teachers and students in my group.
References
[1]. Pranab Roy, Debajyoti Pal, Tanmoy Biswas, Rupam Bhattacharya, and Hafizur Rahaman. Bio-inspired Routing in DMFB: An Artificial Swarm Propagation Based Application. In Proceedings of the 11th International Conference on Advances in Information Technology (IAIT2020). Association for Computing Machinery, New York, NY, USA, Article 37, 1–11 (2020).
[2]. Pampa Howladar, Pranab Roy, and Hafizur Rahaman. A High-performance Homogeneous Droplet Routing Technique for MEDA-based Biochips. J. Emerg. Technol. Comput. Syst. 15, 4, Article 38, PP.37, (December 2019).
[3]. J. Juárez, C. Brizuela, I. Martínez, K. Velázquez and E. Lozano, A genetic algorithm for the routing of droplets in DMFB: Preliminary results, 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), pp. 3808-3815 (2014).
[4]. Zigang Xiao and Evangeline F. Y. Young. CrossRouter: a droplet router for cross-referencing digital microfluidic biochips. In Proceedings of the 2010 Asia and South Pacific Design Automation Conference (ASPDAC '10). IEEE Press, 269–274 (2010).
[5]. Böhringer K.F. Modeling and controlling parallel tasks in droplet-based microfluidic systems. In: Chakrabarty K., Zeng J. (eds) Design Automation Methods and Tools for Microfluidics-Based Biochips. Springer, Dordrecht, (2006).
[6]. Bhattacharya R., Roy P., Rahaman H. A New Homogeneous Droplet Transportation Algorithm and Its Simulator to Boost Route Performance in Digital Microfluidic Biochips. In: Abraham A., Dutta P., Mandal J., Bhattacharya A., Dutta S. (eds) Emerging Technologies in Data Mining and Information Security. Advances in Intelligent Systems and Computing, vol 755. Springer, Singapore, (2019).
[7]. Pan, Indrajit, Samanta, Tuhina, Efficient droplet router for digital microfluidic biochip using particle swarm optimizer, Proceedings of the SPIE, Volume 8760, id. 87601Z 10, (2013).
[8]. Chuanpei Xu, Ying Lv, Xijun Huang, et al. An optimization for online routing test based on particle swarm algorithm on DMFB [J]. Journal of Electronic Measurement and Instrumentation, 31(008):1192-1199 (2017).
[9]. Chuanpei Xu, Leizhen Liu, Chunting Wan. A method based on ant-colony algorithm for reducing contamination on Microfluid biochip [J]. Journal of Electronic Measurement and Instrumentation, 31(002):193-199 (2017).
[10]. Liang, Tung-Che, et al. Adaptive Droplet Routing in Digital Microfluidic Biochips Using Deep Reinforcement Learning. ICML 2020: 37th International Conference on Machine Learning, vol. 1, pp. 6050–6060 (2020).
[11]. Su, Fei, et al. Droplet Routing in the Synthesis of Digital Microfluidic Biochips. Proceedings of the Design Automation & Test in Europe Conference, vol. 1, pp. 323–328 (2006).
[12]. Grissom, Daniel, et al. An Open-Source Compiler and PCB Synthesis Tool for Digital Microfluidic Biochips. Integration, vol. 51, pp. 169–193 (2015).
Cite this article
Wen,S. (2023). A Review for Droplet Routing Algorithms on Digital Microfluid Biochip. Applied and Computational Engineering,2,811-818.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Computing and Data Science (CONF-CDS 2022)
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Pranab Roy, Debajyoti Pal, Tanmoy Biswas, Rupam Bhattacharya, and Hafizur Rahaman. Bio-inspired Routing in DMFB: An Artificial Swarm Propagation Based Application. In Proceedings of the 11th International Conference on Advances in Information Technology (IAIT2020). Association for Computing Machinery, New York, NY, USA, Article 37, 1–11 (2020).
[2]. Pampa Howladar, Pranab Roy, and Hafizur Rahaman. A High-performance Homogeneous Droplet Routing Technique for MEDA-based Biochips. J. Emerg. Technol. Comput. Syst. 15, 4, Article 38, PP.37, (December 2019).
[3]. J. Juárez, C. Brizuela, I. Martínez, K. Velázquez and E. Lozano, A genetic algorithm for the routing of droplets in DMFB: Preliminary results, 2014 IEEE International Conference on Systems, Man, and Cybernetics (SMC), pp. 3808-3815 (2014).
[4]. Zigang Xiao and Evangeline F. Y. Young. CrossRouter: a droplet router for cross-referencing digital microfluidic biochips. In Proceedings of the 2010 Asia and South Pacific Design Automation Conference (ASPDAC '10). IEEE Press, 269–274 (2010).
[5]. Böhringer K.F. Modeling and controlling parallel tasks in droplet-based microfluidic systems. In: Chakrabarty K., Zeng J. (eds) Design Automation Methods and Tools for Microfluidics-Based Biochips. Springer, Dordrecht, (2006).
[6]. Bhattacharya R., Roy P., Rahaman H. A New Homogeneous Droplet Transportation Algorithm and Its Simulator to Boost Route Performance in Digital Microfluidic Biochips. In: Abraham A., Dutta P., Mandal J., Bhattacharya A., Dutta S. (eds) Emerging Technologies in Data Mining and Information Security. Advances in Intelligent Systems and Computing, vol 755. Springer, Singapore, (2019).
[7]. Pan, Indrajit, Samanta, Tuhina, Efficient droplet router for digital microfluidic biochip using particle swarm optimizer, Proceedings of the SPIE, Volume 8760, id. 87601Z 10, (2013).
[8]. Chuanpei Xu, Ying Lv, Xijun Huang, et al. An optimization for online routing test based on particle swarm algorithm on DMFB [J]. Journal of Electronic Measurement and Instrumentation, 31(008):1192-1199 (2017).
[9]. Chuanpei Xu, Leizhen Liu, Chunting Wan. A method based on ant-colony algorithm for reducing contamination on Microfluid biochip [J]. Journal of Electronic Measurement and Instrumentation, 31(002):193-199 (2017).
[10]. Liang, Tung-Che, et al. Adaptive Droplet Routing in Digital Microfluidic Biochips Using Deep Reinforcement Learning. ICML 2020: 37th International Conference on Machine Learning, vol. 1, pp. 6050–6060 (2020).
[11]. Su, Fei, et al. Droplet Routing in the Synthesis of Digital Microfluidic Biochips. Proceedings of the Design Automation & Test in Europe Conference, vol. 1, pp. 323–328 (2006).
[12]. Grissom, Daniel, et al. An Open-Source Compiler and PCB Synthesis Tool for Digital Microfluidic Biochips. Integration, vol. 51, pp. 169–193 (2015).