







1. Introduction
Since its birth, the automobile industry has gone through a long development process from inception to maturity. The origin of the automobile industry can be traced back to the late 19th century, when Karl Benz invented the world's first car with an internal combustion engine in 1885. Early cars were mainly hand-made, with low production and high costs. In 1913, Henry Ford introduced assembly line production technology, which greatly improved production efficiency and reduced costs. From the 1970s to the 1980s, with the occurrence of the oil crisis, automobile manufacturers began to focus on fuel economy and environmental protection, and launched more energy-saving models. After the 1990s, with the acceleration of globalization, the automobile industry entered a new era of international competition, and multinational companies built factories overseas to seek new growth points. Entering the 21st century, the rise of new energy vehicles (such as electric vehicles and hybrid vehicles) and the development of intelligent connected vehicle technology have become new growth points for the automobile industry. The progress of car sharing economy and autonomous driving technology is also reshaping the industry landscape.
The concept of autonomous driving was proposed by American industrial designer Norman Bel Geddes in 1939, and then the United States, the United Kingdom and other countries began to conduct autonomous driving experiments [1]. Entering the 21st century, autonomous driving technology has experienced a period of rapid development. In terms of sensor fusion , the combination of multiple sensors such as lidar, cameras, and millimeter-wave radar has achieved more accurate environmental perception capabilities; high-precision maps and GNSS (Global Navigation Satellite System) combined with inertial navigation systems (INS) and other technologies have achieved centimeter-level positioning accuracy; AI technologies such as deep learning and reinforcement learning are widely used in path planning, obstacle avoidance, and dynamic environment understanding of autonomous vehicles; the development of vehicle-to-vehicle communication (V2V) and vehicle-to-infrastructure communication (V2I) technologies enables vehicles to better interact with other traffic participants and infrastructure, improving the overall efficiency and safety of traffic.
This paper reviews the history of autonomous vehicles and compares the development of autonomous vehicles at home and abroad. It introduces the significance of autonomous vehicles, analyzes the working principle and components of autonomous vehicles, and summarizes the development prospects and current problems of autonomous driving [2]. Autonomous vehicles are facing unprecedented development opportunities. With breakthroughs in artificial intelligence, sensor technology, big data analysis and other fields, autonomous driving technology is maturing rapidly. In the future, autonomous vehicles will achieve higher levels of autonomous driving through more accurate environmental perception, smarter decision-making algorithms and more reliable control systems. This paper studies the development process of autonomous driving in order to help us understand the context of technological progress and learn from it. By reviewing the evolution of autonomous driving from early concepts to today's highly intelligent technology, people can better understand the importance of key technological breakthroughs and their role in propelling this field forward. Understanding this process can also help policymakers and the industry better plan for the future, encourage the sustainable growth of autonomous vehicle technology, and ultimately achieve a safer and more efficient transportation system.
2. Current status of development of autonomous driving technology at home and abroad
2.1. Many governments are trying to promote the development of the autonomous vehicle industry through policy intervention
As early as 2015, the U.S. Department of Transportation raised the intelligent transportation system to the national strategic level and formulated a strategy for the integrated development of networking and intelligence. In 2016, the U.S. federal legal framework had, for the first time, incorporated regulations for the safety oversight of autonomous vehicles. In 2017, the U.S. Department of Transportation encouraged states to amend laws and regulations to provide an environment for the deployment of autonomous driving tests. In 2018, the U.S. Department of Transportation issued "Preparing for the Future of Transportation: Autonomous Vehicles 3.0", which is committed to promoting the deep integration of autonomous vehicles with the existing transportation system while ensuring safety [3]. In 2021, the U.S. Department of Transportation issued the "Comprehensive Plan for Autonomous Vehicles", which aims to ensure the United States' global leading position in the field of autonomous driving. The report emphasizes the principles of safety first, ensuring privacy and data security, and proposes a series of development strategies, including setting three major goals, five priority development areas and three types of public application platforms.
The EU has a solid foundation for the development of the autonomous vehicle industry and is one of the regions with the most advanced autonomous driving technology. As early as 2010, the European Commission formulated the first legal framework to coordinate member states to jointly promote the development of intelligent transportation systems (ITS). The EU has paid great attention to and supported the research and development of advanced automation and vehicle networking technologies, and has set a clear time node for this purpose, with the goal of achieving comprehensive autonomous driving travel by 2030.
In general, governments around the world are actively creating a favorable environment for the development of autonomous vehicles. The United States emphasizes that autonomous vehicles should be deeply integrated into the existing transportation system as part of the transportation system [2]. The European Union focuses on coordination, unification and interconnection.
2.2. China promotes the growth of the autonomous vehicle industry by formulating supportive policies.
In 2016, the 13th Five-Year National Science and Technology Innovation Plan and the 13th Five-Year National Strategic Emerging Industries Development Plan formally proposed the development of intelligent self-driving cars and elevated it to a national development strategy. In April 2022, the Ministry of Transport issued the 14th Five-Year Plan for Science and Technology Innovation in the Transportation Sector, promoting the integrated development of intelligent vehicle technology, smart road technology, and vehicle-road collaboration technology, improving the operation and network security capabilities of self-driving vehicles, and exploring the formation of large-scale application solutions for self-driving technology. In November 2022, the Ministry of Industry and Information Technology released a Notice on the Pilot Program for Access and Road Traffic of Intelligent Connected Vehicles. This program introduced a set of guidelines and planning directives aimed at regulating the entry of intelligent connected vehicle products into the market, further accelerating the development of this sector [4]. In 2023, China has successively issued a large number of laws, policies and standards at the national and local levels, further improving the key policy system of the intelligent connected vehicle industry, and providing a legal basis for the access and commercialization of higher-level intelligent connected vehicles.
3. Classification of autonomous driving levels
Regarding the intelligent level classification of autonomous driving, the Society of Automotive Engineers (SAE) has developed an autonomous driving level classification standard as shown in Figure 1.
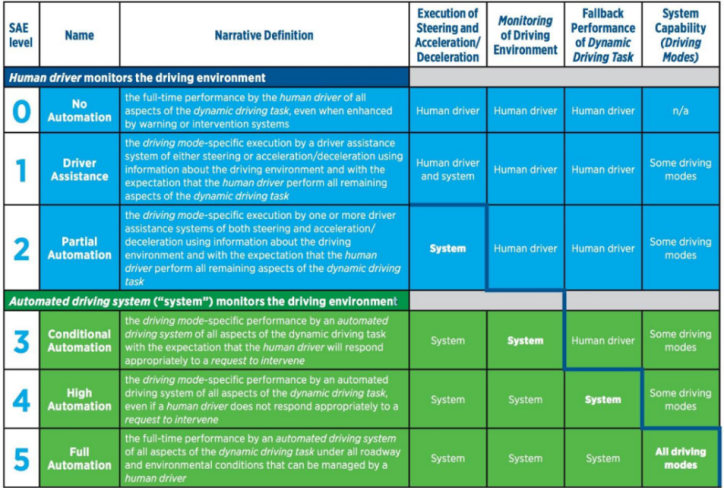
Figure 1: SAE levels for autonomous vehicles.
The most typical classification of intelligent driving levels in China is the Tsinghua University’s method of dividing people, horses, riders and horses, as shown in Figure 2. It mainly includes: offline driving assistance systems, automatic driving in local time periods and local areas, autonomous driving/unmanned driving, and human-centered human-machine collaboration [5].
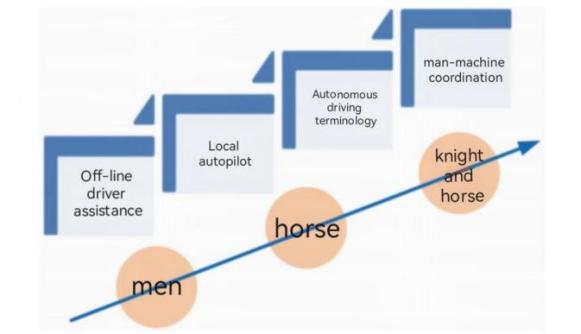
Figure 2: TsingHua levels for autonomous vehicles.
4. Application of key technologies in autonomous driving
4.1. Environmental perception
Onboard environmental perception systems typically rely on visual and radar sensors. However, these traditional technologies face challenges in areas with obstructed visibility, such as intersections and ramps, due to inherent sensor limitations. Current perception methods lack the detection and recognition precision required for the rapid process of autonomous driving. To address these gaps, innovative technologies are emerging, including multi-source heterogeneous information fusion, advanced deep learning for complex scenarios, and vehicle-road collaborative perception. The latter facilitates real-time data exchange between vehicles and roadside units, enabling a collective understanding of the surrounding environment and significantly expanding the vehicle's perception reach beyond direct line-of-sight. This approach not only surpasses the constraints of individual vehicle sensing but also alleviates the computational demands of data processing and reduces the cost and complexity of onboard computing systems. As a result, vehicle-road collaborative perception is poised for widespread commercial adoption in the near future [6].
4.2. Machine learning
Autonomous vehicles rely on a large amount of data to train machine learning models. This data includes inputs from various sensors (such as cameras, radars, and lidars), as well as various dynamic and static objects in the environment. At present, the application of deep learning target recognition algorithms has become a general trend. The target detection algorithm based on deep learning can construct adaptive features through training, which can effectively adapt to the appearance changes of the target to be identified, and overcome the shortcomings of poor adaptability of manually designed features [7]. The quality and diversity of the data set are crucial to improving the robustness and generalization ability of the autonomous driving system. Machine learning technology, especially deep learning, is used to process data from different sensors to help the car perceive its surrounding environment. Based on the perceived information, the autonomous driving system needs to make appropriate decisions, such as changing lanes, overtaking, or stopping. In addition to perception and decision-making, machine learning is also used to plan the vehicle's driving path and control the vehicle to drive safely along the planned path.
5. Future development of autonomous driving technology
5.1. Improve environmental perception
Accurate perception of the driving environment is a key challenge faced by autonomous driving technology as it enters the advanced stage. The environmental perception of autonomous vehicles can be divided into two categories, namely autonomous and collaborative. Autonomous perception mainly relies on sensors on the vehicle, such as lidar, millimeter-wave radar, camera, ultrasonic detector and inertial navigation. In order to enable autonomous vehicles to perceive the surrounding environment more accurately, a dual strategy should be adopted. One is to improve the detection accuracy of sensors; the other is to improve the perception-related calculation methods and fully improve the operating status of the vehicle's perception module. The perception ability of the vehicle itself is difficult to fully meet the complex scenes in actual driving. Therefore, the vehicle needs to have an observation range and depth far beyond human vision, so that it can identify potential threats that are difficult for the human eye to capture. The collaborative perception technology of the Internet of Vehicles can supplement the limitations of independent perception of vehicles. Therefore, collaborative perception between vehicles through the Internet of Vehicles has become the key to improving perception capabilities [8].
5.2. Application of internet of vehicles technology
The Internet of Vehicles (IoV) refers to an application form based on the Internet of Things technology. It is based on the communication equipment in the car and uses wireless communication technology and information technology to enable vehicles to exchange data and communicate with each other (V2V), vehicles and road infrastructure (V2I), vehicles and pedestrians (V2P), vehicles and the Internet (V2N) and other entities. The goal of the IoV is to improve driving safety, efficiency, comfort and entertainment, while also helping to improve traffic flow management, reduce environmental pollution, and provide support for the development of intelligent transportation systems. The application of IoV technology can improve road safety. Through real-time information sharing, IoV can warn of potential dangers, such as traffic accidents or obstacles ahead, so as to help drivers take measures in advance to avoid collisions. In addition, information exchange between vehicles can also help maintain a safe driving distance and reduce the occurrence of rear-end collisions. IoV technology can alleviate traffic congestion by optimizing route planning, and improve traffic flow management and the efficiency of the entire transportation system through collaborative work between vehicles. IoV can not only improve personal driving experience, but also promote the overall intelligent development of the transportation system, which is of great significance to the construction of smart cities.
5.3. Application of high-precision positioning technology
High-precision positioning technology in autonomous driving is one of the key technologies to ensure that autonomous vehicles can drive safely and reliably in various environments. High-precision positioning requires that the vehicle can accurately determine its position, and the error usually needs to be controlled at the centimeter level or even higher. The positioning accuracy provided by the traditional GPS (Global Positioning System) is about a few meters, but for autonomous driving, such accuracy is far from enough. Therefore, more advanced GNSS systems are used, such as the US GPS, Europe's Galileo, Russia's GLONASS, and China's Beidou system. Through multi-satellite combined positioning, differential GPS (DGPS) or real-time dynamic positioning (RTK) technology, the positioning accuracy can be improved to sub-meter or even centimeter level. Inertial navigation systems use gyroscopes and accelerometers to measure the speed and direction changes of the vehicle to calculate the vehicle's position. Although INS can provide very high positioning accuracy in a short period of time, its errors will accumulate over time, so it is usually used in combination with other positioning technologies. High-precision positioning technology is one of the core technologies of autonomous driving. It combines multiple means and technologies to ensure that autonomous vehicles can accurately understand their position in the environment and make correct driving decisions. With the advancement of technology, future high-precision positioning systems will be more intelligent, accurate, and reliable. Cars can achieve their own precise positioning by effectively matching high-precision map data [9].
6. Conclusion
Self-driving car technology is in a stage of rapid development, effectively promoting changes in the transportation and travel fields. China has launched policies related to self-driving cars, which reflects its high priority and clear planning for intelligent connected car technology. With the in-depth integration of advanced sensors, controllers and modern communication technology, future cars can not only achieve highly intelligent driving, but also further improve driving safety and driving efficiency, bringing new growth momentum to China's automobile industry [10]. The development of autonomous driving technology has multiple implications. It can not only significantly improve road safety, but also improve traffic efficiency, enhance the travel experience, and promote environmental protection and economic benefits. First of all, in terms of safety, autonomous driving technology has greatly reduced the road accident rate by eliminating traffic accidents caused by human factors, thus protecting people's lives. Secondly, in terms of traffic efficiency, autonomous driving technology can achieve more coordinated driving, reduce traffic congestion, and improve road capacity through vehicle-to-vehicle communication (V2V) and vehicle-to-infrastructure communication (V2I). In addition, autonomous driving technology provides passengers with more free time to engage in other activities during the journey, thus improving the comfort and convenience of travel. For the elderly, disabled people, and other people who are unable to drive on their own, autonomous driving technology provides a new way to travel, enhancing their independence and quality of life . In terms of environmental protection, autonomous driving technology helps reduce environmental pollution by optimizing driving strategies and reducing unnecessary acceleration and braking, thereby reducing fuel consumption and emissions. At the same time, the application of autonomous driving technology is expected to promote the development of the sharing economy, reduce the number of private cars, and further reduce carbon emissions.
In summary, the development of autonomous driving technology can not only improve personal life, but also bring extensive and far-reaching positive impacts to society. In the future, autonomous driving technology will further integrate multidisciplinary knowledge to achieve more humane and intelligent services, opening up a new era of travel.
References
[1]. Fang Wang, Chao Chen, Jianxi Huang. A review of driverless car research [J]. China Water Transport: The Second Half of the Month [J]. 2016, 12:126-128.
[2]. Mingyu Du. A review of autonomous driving [J]. China Science and Technology, 2018(6):215-216.
[3]. Qiuwei Li, Tong Shen. Analysis of the current status and trends of foreign autonomous driving vehicles [J]. New Materials Industry, 2020(4):51-53.
[4]. Feilong Li. A brief analysis of the current status and future trends of domestic autonomous driving [J]. Telecom Express, 2023(5):35-37.
[5]. Deyi Li. Practice and Prospect of Intelligent Vehicle Industrialization [J]. Robot Industry, 2016(4):58-63.
[6]. Junhui Zhang, Dapeng Chen, Qing Li. Research status and development trend of autonomous driving technology [J]. Science Technology and Engineering, 2020, 20(9): 3394-3403.
[7]. Yuhui Peng, Ming Jiang, Zhongyuan Ma, et al. Research progress of key technologies for autonomous driving [J]. Journal of Fuzhou University (Natural Science Edition), 2021, 49(5): 691-703.
[8]. Nanning Zheng, Bei Xu. How far are we from autonomous driving? [N]. Jiefang Daily, 2021-10-8(10).
[9]. Pengbo Hou. The latest development direction and application prospects of automobile autonomous driving technology [J]. Engineering Technology Research, 2018(14):198-199.
[10]. Shanbao Duan. On the future and development direction of autonomous driving technology [J]. China Science and Technology, 2024(8):17-19.
Cite this article
Zhang,K. (2024). A Review of Current Research and Future Development of Autonomous Driving Technology. Applied and Computational Engineering,116,22-28.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 5th International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Fang Wang, Chao Chen, Jianxi Huang. A review of driverless car research [J]. China Water Transport: The Second Half of the Month [J]. 2016, 12:126-128.
[2]. Mingyu Du. A review of autonomous driving [J]. China Science and Technology, 2018(6):215-216.
[3]. Qiuwei Li, Tong Shen. Analysis of the current status and trends of foreign autonomous driving vehicles [J]. New Materials Industry, 2020(4):51-53.
[4]. Feilong Li. A brief analysis of the current status and future trends of domestic autonomous driving [J]. Telecom Express, 2023(5):35-37.
[5]. Deyi Li. Practice and Prospect of Intelligent Vehicle Industrialization [J]. Robot Industry, 2016(4):58-63.
[6]. Junhui Zhang, Dapeng Chen, Qing Li. Research status and development trend of autonomous driving technology [J]. Science Technology and Engineering, 2020, 20(9): 3394-3403.
[7]. Yuhui Peng, Ming Jiang, Zhongyuan Ma, et al. Research progress of key technologies for autonomous driving [J]. Journal of Fuzhou University (Natural Science Edition), 2021, 49(5): 691-703.
[8]. Nanning Zheng, Bei Xu. How far are we from autonomous driving? [N]. Jiefang Daily, 2021-10-8(10).
[9]. Pengbo Hou. The latest development direction and application prospects of automobile autonomous driving technology [J]. Engineering Technology Research, 2018(14):198-199.
[10]. Shanbao Duan. On the future and development direction of autonomous driving technology [J]. China Science and Technology, 2024(8):17-19.