






1. Introduction
Brain-computer interface is a technology that connects the brain and external devices. It can collect signals from the brain and transmit them to external devices. This technology usually includes three steps. The first is to collect signals from the brain and transmit them to the external tongue. The second is that the external device decodes the collected signals. The third is that the external device generates feedback based on the decoding results. In other words, this technology usually decodes the user's intention by collecting signals from the brain so that the external device can generate instructions consistent with the user's intention. This is a very imaginative way of human-computer interaction. It can facilitate people who cannot use other limbs to interact with external devices to interact with the outside world, and it can also make the interaction between people and machines more possible.
Classification according to the difference in invasiveness is a common method of classifying brain-computer interfaces. Using this classification method, brain-computer interfaces can be divided into three categories: invasive brain-computer interfaces, partially invasive brain-computer interfaces, and non-invasive brain-computer interfaces. Invasive brain-computer interfaces usually require the device for collecting signals to be surgically implanted under the scalp. The difference between partially invasive brain-computer interfaces and invasive brain-computer interfaces is that the implantation depth of partially invasive brain-computer interfaces is shallower, generally outside the gray matter inside the skull of the brain. Although devices implanted in the brain can usually collect higher quality signals, there are risks in surgery. The third type, non-invasive brain-computer interface, does not have surgical risks. It only collects neural activity signals on the surface of the brain and does not require the equipment for collecting signals to be implanted into the brain through surgery.
In recent years, non-invasive brain-computer interfaces have developed rapidly, and related applications involve multiple fields such as medical treatment, rehabilitation, and entertainment. Specific research directions include non-invasive neural-driven prosthetic arm systems, the use of function-oriented BCI training to promote hand rehabilitation after stroke, and brain intention control of robots. Currently, the summary of the latest applications of non-invasive brain-computer interfaces in the fields of medicine and rehabilitation is not comprehensive and easy to understand enough. This review aims to organize the existing and ongoing applications of non-invasive brain-computer interfaces in the fields of medicine and rehabilitation in recent years and express them in a simple and easy-to-understand way to help readers who do not have relevant knowledge base to have a general understanding of this.
2. Rehabilitation
Because brain-computer interfaces can assist the brain and external devices in communicating, they can help solve problems in the field of neurorehabilitation. With the further development of brain-computer interface technology and neurorehabilitation, some non-invasive brain-computer interface applications in the field of neurorehabilitation have emerged. Compared with traditional neurorehabilitation approaches, they can usually do better in obtaining real-time feedback from patients' brain activity and analyze the data, and then provide more personalized rehabilitation therapy.
A 2023 article proposed a portable, non-invasive BCI device to help patients recover hand movement after a stroke [1]. Many BCI devices that have appeared before are complicated to operate and inconvenient for clinical use. The solution proposed in this article explores the efficiency of BCI-assisted stroke rehabilitation for hand, at the same time emphasizing the ease of use of the device.
To understand what this device can accomplish, two pieces of information need to be understood. First, a stroke is a condition in which a problem with the blood supply to the brain causes cell death and parts of the brain to stop working properly. Second, task-oriented training is an option for patients who have had a stroke, and the patients can regain skills lost after a stroke through practicing real-life tasks.
The portable non-invasive BCI device mentioned in this article combines task-oriented training with BCI. This study hopes to explore whether the user's recovery efficiency will be greater after using this device for task-oriented training than the recovery efficiency in traditional task-oriented training. To explore this issue, the researchers designed a BCI-based grasping/opening movement training for hand and compared it with traditional task-oriented training for hand. The results confirmed that this portable non-invasive BCI device can promote the recovery of hand motor function after stroke. Figure 1 is the flowchart of the trial that creates this result.
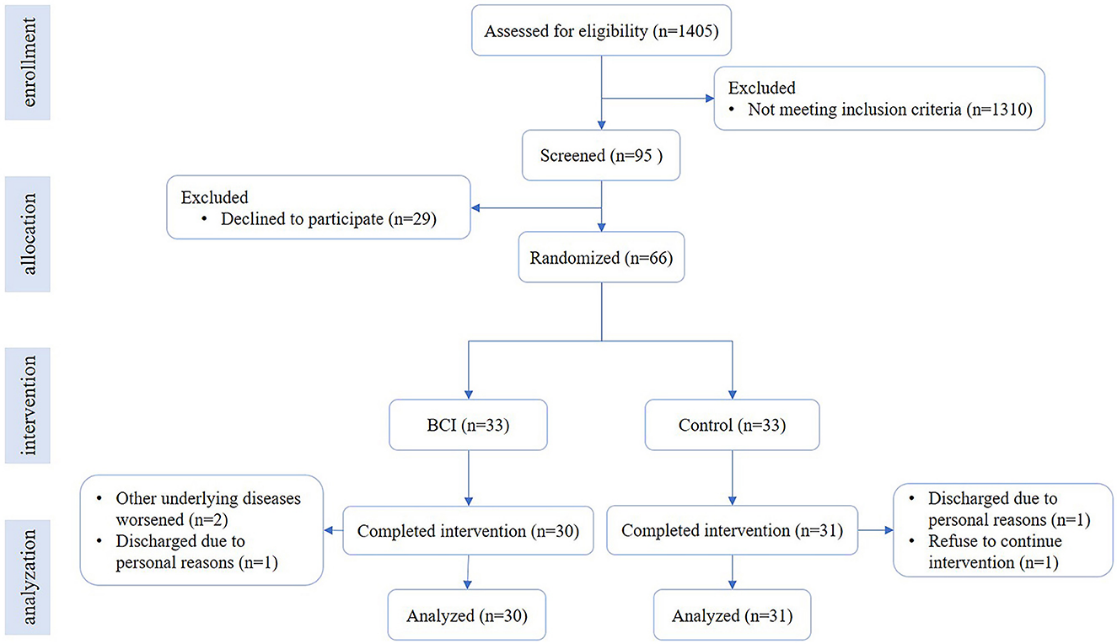
Figure 1. Flowchart of the trial [2]
This device has achieved initial success, and its portability and ease of use are great features as a product. But it still has many limitations. First of all, it only has two motor tasks, and there are many types of hand dysfunction. As a mature product, more motor tasks need to be implemented in this device. Secondly, if it needs to appear on the market as a qualified product, it needs to undergo much more trials and tests, and to collect more usage data from patients to ensure its reliability. Finally, in terms of BCI, there is room for improvement in the accuracy of obtaining EEG and decoding brain activity. Although there are many aspects that can be improved, this application also demonstrates the potential of non-invasive BCI in the field of post-stroke rehabilitation training, and shows that the current research result is not far from becoming a product that can be actually put on the market.
There are many applications of using non-invasive BCI to solve the rehabilitation problems after stroke that are still being studied. Similar to the applications mentioned above, there is the use of motor imagery brain-computer interface (MI-BCI) combined with physical therapy for upper limb rehabilitation training of ischemic stroke, and the research results show that it is more effective than physical therapy alone [3]. And the application of soft rehabilitation system based on BCI-VR technology, which can make the hand rehabilitation training of stroke patients more targeted and effective [4]. In the field of comprehensive rehabilitation of hemiplegic stroke patients, there is an application of using brain-computer interface training combined with mindfulness therapy to improve the limb motor function, activity ability and sleep quality of hemiplegic stroke patients [5]. The research on this application has also obtained positive results. Such combined therapy has been confirmed by research to promote rehabilitation. In addition to the applications mentioned above, there are many other applications being studied. Among them, the application of upper limb rehabilitation assistance after stroke in the rehabilitation of motor ability is close to maturity, while the application related to lower limb rehabilitation is relatively far from maturity. In addition, a more interesting study is the application of gamification of BCI rehabilitation systems to improve user experience [6]. The word "interesting" is used to describe the research about gamification of BCI rehabilitation systems because its target is to try to make users feel that the rehabilitation process is not so boring, which is not so "useful" from some perspectives. However, user experience is also an important part of the product. It can increase the user's willingness to use it, and research in this area is also very meaningful.
In addition to using non-invasive BCI to assist post-stroke patients in their rehabilitation activities, using non-invasive brain-computer interfaces to help spinal cord injury (SCI) patients recover motor function is also a popular research topic. SCI causes spinal cord dysfunction in the patient's limbs below the injury level. The advantage of non-invasive brain-computer interfaces (BCI) in dealing with this problem is that it can extract brain signals, bypass the part of the spinal cord that is dysfunctional, and transmit instructions to external devices to restore lost functions to a certain extent, such as movement and sensation [7]. One application is the use of BCI based on electroencephalogram (EEG) gait imagery to promote motor recovery on the Lokomat platform [8]. Compared with the booming development of non-invasive BCI in the field of post-stroke rehabilitation, there are not many products that are close to being put into practical use in the field of spinal cord injury rehabilitation.
3. Medical
In the medical field outside of rehabilitation, non-invasive brain-computer interfaces also have a lot of application space. For example, patients who cannot communicate through language or gestures can use non-invasive brain-computer interfaces to interact with computers to achieve communication, identify and even participate in the control and treatment of depression to some extent, and use brain-controlled prostheses or robots to help users who have lost their ability to move. Many different research directions are being carried out around the world. Non-invasive brain-computer interfaces have brought more possibilities for the treatment of many diseases, and also brought new life opportunities to patients who have lost their healthy bodies.
There are already some available hand prosthesis devices combined with brain-computer interface technology, including invasive solutions and non-invasive solutions. Such prostheses can assist users in completing many activities in life and help users improve their quality of life. However, most of these solutions require high costs, and many users who need prostheses cannot afford this cost. Recently, a solution called MindArm was proposed [9]. One of the important goals of this solution is to provide a low-cost prosthetic arm system combined with non-invasive brain-computer interface technology. The team that proposed this solution defined three actions to test the feasibility of this solution, these three actions are idle/stationary, shake hand, and pick-up cup. The success rates of each three actions are all more than 80%, which shows that this solution has feasibility. In order to reduce costs, this solution chooses to use the low-cost off-the-shelf Ganglion board to obtain EEG signal features. In order to reduce the maintenance price of this solution, the design of this prosthesis is modular, and each component can be removed and replaced. Finally, the team calculated that the total cost of building a complete device is about $450. This price is much lower than most other available solutions.
At the same time, there are many teams around the world studying brain-controlled hand prostheses based on brain-computer interfaces, and these teams are researching in different directions. In addition to the research direction of how to reduce the cost of equipment generation and cost of equipment maintenance mentioned above, there are also research directions such as improving the accuracy of brain-controlled hand prostheses [10] and enhancing the user's ownership to brain-controlled hand prostheses [11]. In general, in the field of hand prosthesis devices combined with brain-computer interface technology, there are already many products that can deal with some basic life movements, but there are still many areas that need to be improved. How to further improve the accuracy of movement, how to decode and implement more complex movements, how to make hand prostheses produce touch, feedback pressure and temperature and so on are all worthy of study.
Another application is the combination of brain-computer interface technology and robotics technology. Users can use brain-computer interface technology to control robots with their brain intentions. This provides more usage scenarios than brain-controlled prosthetic arms. More kinds of disabled people and people with healthy limbs can use this technology. One of the studies in this field combined non-invasive brain-computer interface technology with autonomous indoor navigation scheme to develop a humanoid robot control system [12]. Before this study, there were studies that used brain-computer interface technology to control humanoid robots, which also proved the feasibility of such control. The breakthrough or difference of this study is that it combines autonomous indoor navigation technology based on simultaneous localization and mapping (SLAM) to achieve walking tasks for humanoid robots. The use of this technology can reduce the number of control commands sent by users. Fewer control commands mean less mental load on users. The experimental results of this study show that users can use this humanoid robot control system to complete navigation tasks without training. This means that this system is feasible. However, in the direction of brain-controlled humanoid robots, the current research results are still far from products that can solve real needs. Robots can only complete very simple tasks, such as walking and grabbing objects [13]. There are still many issues worth studying in this field, such as how to perform more precise walking tasks in complex environments and how to complete more complex movements.
In addition to the first two directions, which are more researched, there are many imaginative and potential projects being studied. For example, exploring the impact of non-invasive brain-computer interfaces on drug abuse and drug addiction [14]. This research can only show that non-invasive brain-computer interfaces have the potential to be more effective than traditional treatments, and the exploration of related therapies needs to be deepened. In addition, there are attempts to integrate non-invasive brain-computer interfaces into clothing, allowing users to control wheelchairs through intentions. Although the results of this project are very limited, it also shows the possibility of a future non-invasive brain-computer interface - combined with clothing [15]. In general, the application of decoding movement intentions is generally more mature, but there are still many directions that need further research. It has shown many possibilities for solving practical problems and is expected to solve more problems. However, the interpretation of other information is not so smooth, and many results cannot be fully explained. Human nerves are still very mysterious and need further exploration and decoding.
4. Conclusion
This article reviews the latest applications of non-invasive BCI technology in the fields of medical rehabilitation and assistive device control, highlighting its potential to facilitate patient recovery and enhance the quality of life. Non-invasive BCI technology, by monitoring brain activity in real-time, provides new rehabilitation training methods for stroke and spinal cord injury patients, and offers new communication avenues for patients with communication disorders through the control of prosthetic limbs and robots. Despite challenges in accuracy, cost, and user acceptance, the development of non-invasive BCI technology has brought new hope to the field of medical rehabilitation. Future research should continue to optimize non-invasive BCI technology to enhance its accuracy and stability, reduce costs, and improve user experience. Moreover, interdisciplinary collaboration is crucial for advancing non-invasive BCI technology, requiring concerted efforts from experts in neuroscience, computer science, biomedical engineering, and other related fields. Through in-depth clinical trials and user studies, the safety and efficacy of non-invasive BCI technology can be further verified, laying the foundation for its broad application in the field of medical rehabilitation. The development of non-invasive BCI technology not only brings benefits to patients but also drives technological progress and societal development in related fields, holding significant scientific and societal value.
References
[1]. Fu, J., Chen, S., Shu, X., Lin, Y., Jiang, Z., Wei, D., Gao, J., & Jia, J. (2023). Functional-oriented, portable brain–computer interface training for hand motor recovery after stroke: a randomized controlled study. Frontiers in Neuroscience, 17.
[2]. Note. By Fu, J., Chen, S., Shu, X., Lin, Y., Jiang, Z., Wei, D., Gao, J., & Jia, J. (2023). Functional-oriented, portable brain–computer interface training for hand motor recovery after stroke: a randomized controlled study. Frontiers in Neuroscience, 17.
[3]. Liao, W., Li, J., Zhang, X., & Li, C. (2023). Motor imagery brain–computer interface rehabilitation system enhances upper limb performance and improves brain activity in stroke patients: A clinical study. Frontiers in Human Neuroscience, 17.
[4]. Gao, N., Chen, P., & Liang, L. (2023). BCI–VR-Based Hand Soft Rehabilitation System with Its Applications in Hand Rehabilitation After Stroke. International Journal of Precision Engineering and Manufacturing, 24(8), 1403–1424.
[5]. Wang, P., Liu, J., Wang, L., Ma, H., Mei, X., & Zhang, A. (2023). Effects of brain–Computer interface combined with mindfulness therapy on rehabilitation of hemiplegic patients with stroke: a randomized controlled trial. Frontiers in Psychology, 14.
[6]. Javier, R. S., Daniela, T. P., & De Catalunya Departament De Ciències De La Computació, U. P. (2024, February 20). Gamification of post-ictus rehabilitation with BCI.
[7]. Chen, J., Liu, Q., Tan, C., Yang, X., Zhao, Y., Hu, Q., Chen, G., & Lan, Y. (2024). Non-invasive brain-computer interfaces effectively improve motor function, sensory function, and activities of daily living in patients with spinal cord injury: a systematic review and meta-analysis. Brain Network and Modulation, 3(1), 9–19.
[8]. Blanco-Diaz, C. F., Da Silva Serafini, E. R., Bastos-Filho, T., De Azevedo Dantas, A. F. O., Santo, C. C. D. E., & Delisle-Rodriguez, D. (2024). A Gait Imagery-Based Brain-Computer Interface with Visual feedback for Spinal Cord Injury Rehabilitation on Lokomat. IEEE Transactions on Biomedical Engineering, 1–10.
[9]. Nawaz, M., Basit, A., & Shafique, M. (2024, March 29). MindArM: Mechanized Intelligent Non-Invasive Neuro-Driven Prosthetic Arm System. arXiv.org. https://arxiv. org/abs/2403.19992
[10]. Li, R., Bai, D., Li, Z., Yang, S., Liu, W., Zhang, Y., Zhou, J., Luo, J., & Wang, W. (2024). The SSHVEP Paradigm-Based Brain Controlled Method for Grasping Robot using MVMD Combined CNN model. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 32, 2564–2578.
[11]. Cheng, S., Liu, Y., Gao, Y., & Dong, Z. (2024). “As if it were my own hand”: inducing the rubber hand illusion through virtual reality for motor imagery enhancement. IEEE Transactions on Visualization and Computer Graphics, 1–11.
[12]. Wang, Y., Zhang, M., Li, M., Cui, H., & Chen, X. (2024). Development of a humanoid robot control system based on AR-BCI and SLAM navigation. Cognitive Neurodynamics.
[13]. Spataro, R., Chella, A., Allison, B., Giardina, M., Sorbello, R., Tramonte, S., Guger, C., & La Bella, V. (2017). Reaching and Grasping a Glass of Water by Locked-In ALS Patients through a BCI-Controlled Humanoid Robot. Frontiers in Human Neuroscience, 11.
[14]. Tang, A. (2024). The influence of Non-Invasive Brain-Computer interfaces on drug abuse and sobriety. Highlights in Science Engineering and Technology, 102, 351–355.
[15]. Liu, R., Song, Q., Ma, T., & Pan, H. (2024). Remapping Movement of Shoulder with Soft Sensors: A Non-invasive Wearable Body-Machine Interface. IEEE Sensors Journal, 1.
Cite this article
Jiang,L. (2024). The Applications of Non-Invasive Brain-Computer Interfaces in Rehabilitation and Medical Field. Applied and Computational Engineering,110,85-90.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of CONF-MLA 2024 Workshop: Securing the Future: Empowering Cyber Defense with Machine Learning and Deep Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Fu, J., Chen, S., Shu, X., Lin, Y., Jiang, Z., Wei, D., Gao, J., & Jia, J. (2023). Functional-oriented, portable brain–computer interface training for hand motor recovery after stroke: a randomized controlled study. Frontiers in Neuroscience, 17.
[2]. Note. By Fu, J., Chen, S., Shu, X., Lin, Y., Jiang, Z., Wei, D., Gao, J., & Jia, J. (2023). Functional-oriented, portable brain–computer interface training for hand motor recovery after stroke: a randomized controlled study. Frontiers in Neuroscience, 17.
[3]. Liao, W., Li, J., Zhang, X., & Li, C. (2023). Motor imagery brain–computer interface rehabilitation system enhances upper limb performance and improves brain activity in stroke patients: A clinical study. Frontiers in Human Neuroscience, 17.
[4]. Gao, N., Chen, P., & Liang, L. (2023). BCI–VR-Based Hand Soft Rehabilitation System with Its Applications in Hand Rehabilitation After Stroke. International Journal of Precision Engineering and Manufacturing, 24(8), 1403–1424.
[5]. Wang, P., Liu, J., Wang, L., Ma, H., Mei, X., & Zhang, A. (2023). Effects of brain–Computer interface combined with mindfulness therapy on rehabilitation of hemiplegic patients with stroke: a randomized controlled trial. Frontiers in Psychology, 14.
[6]. Javier, R. S., Daniela, T. P., & De Catalunya Departament De Ciències De La Computació, U. P. (2024, February 20). Gamification of post-ictus rehabilitation with BCI.
[7]. Chen, J., Liu, Q., Tan, C., Yang, X., Zhao, Y., Hu, Q., Chen, G., & Lan, Y. (2024). Non-invasive brain-computer interfaces effectively improve motor function, sensory function, and activities of daily living in patients with spinal cord injury: a systematic review and meta-analysis. Brain Network and Modulation, 3(1), 9–19.
[8]. Blanco-Diaz, C. F., Da Silva Serafini, E. R., Bastos-Filho, T., De Azevedo Dantas, A. F. O., Santo, C. C. D. E., & Delisle-Rodriguez, D. (2024). A Gait Imagery-Based Brain-Computer Interface with Visual feedback for Spinal Cord Injury Rehabilitation on Lokomat. IEEE Transactions on Biomedical Engineering, 1–10.
[9]. Nawaz, M., Basit, A., & Shafique, M. (2024, March 29). MindArM: Mechanized Intelligent Non-Invasive Neuro-Driven Prosthetic Arm System. arXiv.org. https://arxiv. org/abs/2403.19992
[10]. Li, R., Bai, D., Li, Z., Yang, S., Liu, W., Zhang, Y., Zhou, J., Luo, J., & Wang, W. (2024). The SSHVEP Paradigm-Based Brain Controlled Method for Grasping Robot using MVMD Combined CNN model. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 32, 2564–2578.
[11]. Cheng, S., Liu, Y., Gao, Y., & Dong, Z. (2024). “As if it were my own hand”: inducing the rubber hand illusion through virtual reality for motor imagery enhancement. IEEE Transactions on Visualization and Computer Graphics, 1–11.
[12]. Wang, Y., Zhang, M., Li, M., Cui, H., & Chen, X. (2024). Development of a humanoid robot control system based on AR-BCI and SLAM navigation. Cognitive Neurodynamics.
[13]. Spataro, R., Chella, A., Allison, B., Giardina, M., Sorbello, R., Tramonte, S., Guger, C., & La Bella, V. (2017). Reaching and Grasping a Glass of Water by Locked-In ALS Patients through a BCI-Controlled Humanoid Robot. Frontiers in Human Neuroscience, 11.
[14]. Tang, A. (2024). The influence of Non-Invasive Brain-Computer interfaces on drug abuse and sobriety. Highlights in Science Engineering and Technology, 102, 351–355.
[15]. Liu, R., Song, Q., Ma, T., & Pan, H. (2024). Remapping Movement of Shoulder with Soft Sensors: A Non-invasive Wearable Body-Machine Interface. IEEE Sensors Journal, 1.