






1. Introduction
Unmanned Aerial Vehicles (UAVs) have attracted significant attention due to their wide range of applications in various fields. However, their range is limited, and the stringent requirement for an overall lightweight design—unlike that of other electric devices (e.g., electric cars)—makes it difficult to further increase battery capacity. In contrast, secondary charging of UAV onboard batteries has become an attractive solution, enabling non-contact energy replenishment through the principle of electromagnetic field coupling. This effectively enhances the operating time and range of UAVs, facilitating efficient and widespread applications. Nonetheless, wireless charging technology currently faces several challenges in practical applications, including key technical issues such as coupling mechanism design, misalignment coping strategies, and electromagnetic tolerance. Addressing these issues will help promote the further development and wide application of wireless charging technology for UAVs.
1.1. Domestic and International Research Status
The magnetic-electric field coupling mechanism is a research hotspot both domestically and internationally. Related research mainly focuses on coupling mechanisms, electromagnetic leakage and shielding, and anti-offset strategies. The overall goal is to construct a stable, energy-saving, and efficient controlled charging design through methods such as system modeling and practical implementation.
1.2. Practical Problems and Directions of Research
Wireless charging of UAVs can be divided into two main types: hovering and landing. Based on current relevant research, hovering designs have several advantages over landing designs, including reduced footprint and environmental impact, the elimination of the need for precise landing (thereby reducing mechanical wear and tear), and the ability to keep the controller powered on. Three main research directions for hovering include: mutual sensing continuity perturbation, lightweight design on the receiving side, and fast energy replenishment. Current research primarily focuses on the first point—analyzing mutual sensing continuity perturbation in the hovering wireless charging system under actual working conditions. This aims to explore a real-time and fast mutual sensing tracking scheme to mitigate the impact of mutual sensing continuity perturbation on wireless energy replenishment, thereby providing the necessary prerequisites for achieving stable and constant transmission performance (e.g., constant current, constant power, etc.). Studies related to landing have mainly concentrated on misaligned response schemes.
1.3. Magnetically-coupled Resonant Wireless Power Transfer Technology
Magnetically coupled resonant wireless charging stands out as the most frequently mentioned technology among the diverse array of wireless charging options. Magnetically Coupled Resonant Wireless Power Transfer (MCR-WPT) utilizes resonance principles, allowing for high efficiency and substantial power transfer over moderate distances (typically several times the diameter of the transmission coil)[1][2]. The power supply supplies power to the transmitting coil, with a frequency of the system resonant frequency. At this time, the transmitting coil resonates. Even at a low supply voltage, because of resonance, a large current can be generated, thus establishing a stronger electromagnetic field. The electric field of the capacitance in the transmitting coil can continuously exchange energy with the magnetic field energy in the inductance coil due to resonance. Meanwhile, part of the magnetic field in the transmitting end inductance coil links to the receiving end inductance coil, alternating magnetic field induces current in the receiving coil, thus transferring energy to the receiving end. At the receiving end, the two energy storage elements also transfer energy to each other, ultimately transferring energy to the load.
1.4. Chapter Schedule
The subsequent chapters are organized as follows:
Part II: Introducing mainstream research problems
Part III: Disassembling and analyzing two papers each on hovering and landing directions
Part IV: Future outlook
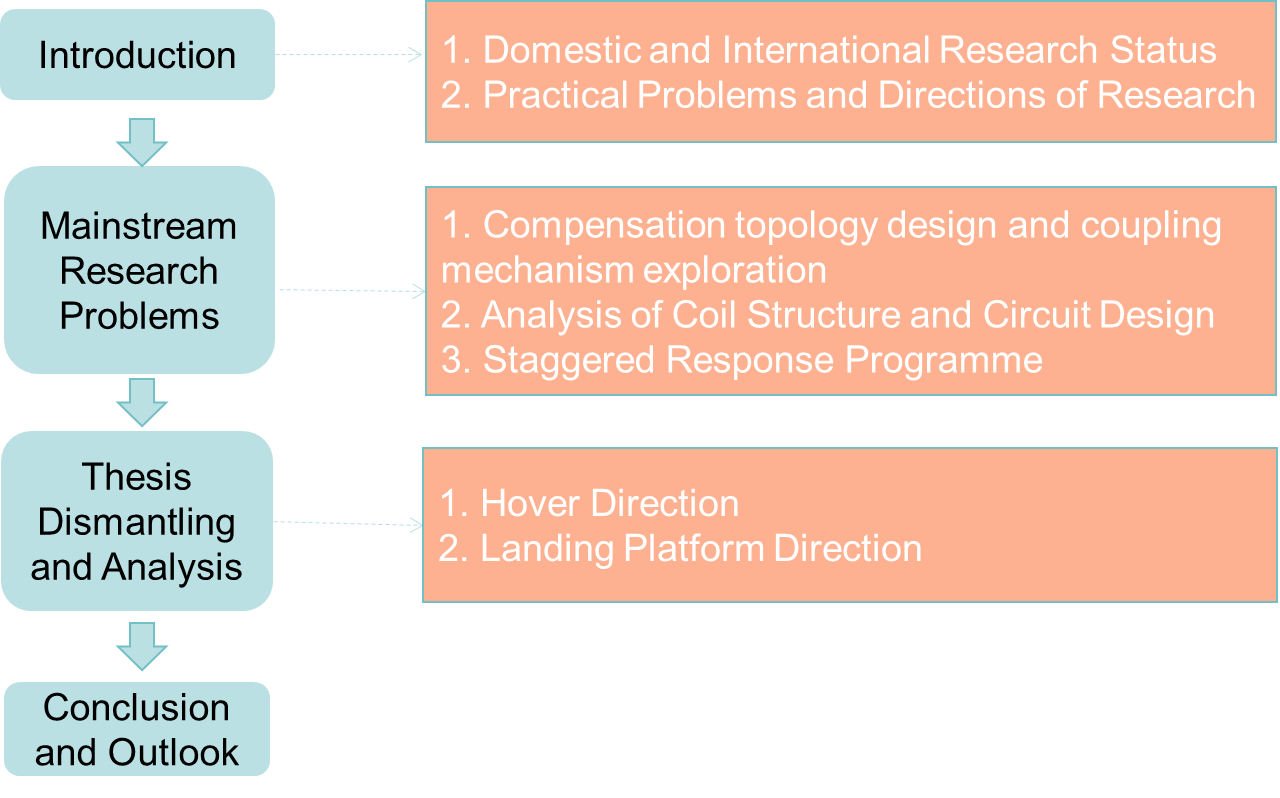
Figure 1: Outline Chart.
2. Mainstream Research Problems
2.1. General Overview of Topical Issues
Wireless charging of UAVs faces the following problems:
1. UAVs are prone to external electromagnetic interference during operation, necessitating a high-performance coupling mechanism with strong coupling ability and an enhanced magnetic energy coupling topology. This has become a key issue for the wireless charging of UAVs.
2. The heterogeneous structure of UAVs requires a coil and circuit design that demonstrate strong adaptability and high efficiency to ensure stable constant-current and constant-voltage output.
3. The offset distance that may occur after a UAV lands is often much larger than the fuselage size, making reliable charging under a wide range of misalignment another key issue to be addressed in wireless charging for UAVs.
In view of the above three problems, this paper will systematically analyze and review the results of research on UAV wireless charging electromagnetic coupling mechanisms and misalignment response schemes, with the aim of providing a reference for the research and application of UAV wireless charging technology.
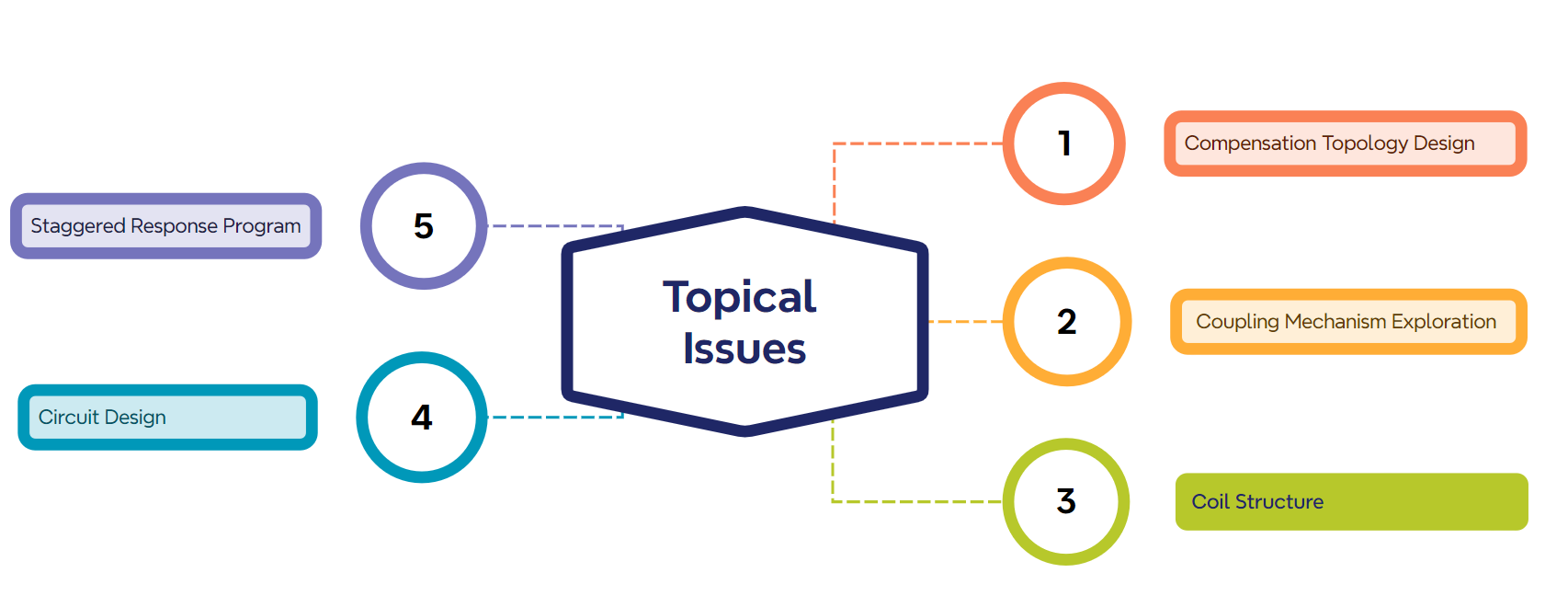
Figure 2: Topical Issues Chart.
2.2. Compensation Topology Design and Coupling Mechanism Exploration
2.2.1. Compensation Topology Design
To achieve continuity of mutual inductance under external perturbations and improve the system’s offset resistance, the design of compensation topologies is required. Researchers generally use LCC and S configurations in combination after building the simulation model, hoping to achieve accurate control of the system’s resonance state by adopting different compensation strategies. Depending on the specific research objectives, either LCC or S may be used.
Literature [3] chose the LCC-S compensation topology. The LCC-S topology achieves precise control of the resonant state of the system by employing different compensation strategies on the primary and secondary sides, respectively. Optimal efficiency under varying load conditions is achieved through PWM rectification techniques, considering the load variations of the UAV during the charging process. Literature [4], on the other hand, proposed the S-S-S and LCC-LCC topologies, further developing the LCC-S-LCC topology. The advantages of the LCC-S-LCC topology in terms of output power and transmission efficiency were verified through theoretical analysis and simulation. In Literature [5], the S-S compensation topology was chosen for the UAV wireless charging system, which provides a purely resistive input impedance in the resonant state, thereby improving system efficiency.
2.2.2. Coupling Mechanism Design
The coupling mechanism is another key component in the wireless charging system, directly affecting the efficiency and reliability of energy transfer. It can be optimally designed to enhance transfer efficiency and the coupling coefficient. Researchers commonly improve the specific structure based on the anisotropic characteristics of UAVs and practical application scenarios to enhance space utilization and the coupling coefficient.
The study in Literature [3] focuses more on the dynamic characteristics of the coupling mechanism and the scenario of multi-UAV charging. In this paper, the mutual coupling problem of the coupling mechanism in a multi-coil system is analyzed, and a corresponding decoupling strategy is proposed. Literature [4] focuses on the design of array coil units and proposes a 2 × 2 heterogeneous overlapping array structure to design the transmission coils through spatial dislocation and overlapping arrangements, improving the uniformity of the magnetic field and the coupling coefficient between the array units. Literature [5] proposed an orthogonal magnetic coupling device that improves the coupling coefficient by optimizing the structure of the transmitting and receiving coils while reducing the weight on the receiving side.
2.3. Analysis of Coil Structure and Circuit Design
2.3.1. Coil Structure
In wireless charging for UAVs, coil design is crucial for achieving efficient energy transfer. As the core component of the electromagnetic coupling mechanism, the design of the coil directly affects transmission efficiency, charging power, and tolerance for positional offset in the wireless charging system.
Literature [7] studied and analyzed the magnetic coupling characteristics of various shapes of symmetrical coils and proposed an asymmetrical coil magnetic coupling mechanism based on the size limitations of the onboard end of the UAV and the requirements for offset capability. In Literature [8], a concave coupling structure was designed and fabricated to accommodate the special fuselage structure of UAVs and the narrow space in the abdomen. Literature [9] proposed a high power density magnetic coupling mechanism design scheme. After comparing various magnetic coupling mechanisms, a planar rectangular structure was selected. From a lightweight perspective, the effects of ferrite core arrangement, magnetic material type, and thickness on system transmission performance were analyzed, leading to the completion of an optimized design for the magnetic coupling mechanism.
2.3.2. Circuit Design
The circuit design of a UAV charging system must consider several aspects, including automation, intelligence, safety, and efficiency, to ensure that the UAV can charge and return to its mission quickly and safely. Researchers have attempted to integrate controlled systems into the coupling mechanism design, such as incorporating electronic components to implement soft switches and optional converters.
In Literature [7], a method for adjusting compensation capacitor parameters to achieve soft switching is proposed. A bilateral LCC circuit model is established, investigating the effect of circuit compensation capacitor parameters on the phase difference of the system. The parameters of the resonant elements are optimally designed to improve the transmission efficiency of the wireless charging system. Literature [8] conducts optimal design analysis of the inductance ratio between the primary and secondary sides to simplify the system’s circuit and derive expressions for the output voltage and output current. Literature [9] designed a secondary-side power converter based on average current control, addressing the constant current and constant voltage charging needs of lithium batteries for UAVs. A charging management circuit based on a Buck converter was selected, and the PI compensation parameters for double closed-loop control were designed. Additionally, a master-slave average current control strategy, featuring a single voltage outer loop and multiple current inner loops, is proposed to ensure the stability of the output current in a single wireless charging module as the number of parallel modules changes.
2.4. Staggered Response Program
UAVs have gained attention for their wide range of applications in several fields, but the limitation of battery life has become a major bottleneck in their development. Wireless charging technology provides a solution, particularly magnetic coupled resonant wireless charging technology, which can deliver energy to UAVs without contact. However, positioning errors during landing can lead to coil misalignment, which in turn affects charging efficiency. To address this problem, researchers have proposed various countermeasures for misalignment.
A novel landing position detection method is proposed in Literature [10], based on the negative coupling characteristics of the extended coil. This method not only improves tolerance for misalignment but also enables cost-effective and flexible expansion of the charging area. Literature [4] proposes a heterogeneous overlapping 2 × 2 array coil structure to address the misalignment issue in UAV wireless charging systems. Through spatial misalignment overlapping arrangements, an array coil system with improved anti-offset characteristics is designed. A detailed analysis of magnetic field coupling and misalignment tolerance capability of the magnetic coupling device is presented in Literature [5], with the misalignment tolerance of the system verified through simulation and experimentation within a certain range. Literature [7] proposes a sliding mode variable structure control strategy for fixed-point landing control of UAVs, and its effectiveness is validated by comparing it to traditional PID control through simulation and experimentation.
3. Thesis Dismantling and Analysis
In this section, two papers will be selected based on the classification introduced in the first part for a more systematic and detailed disassembly, aiming to explore the research ideas and mechanisms of wireless charging in depth. The following outlines the main research themes and the range of questions explored in this field.

Figure 3: Main Research Ideas Chart.
Main Research Ideas:
1. Analysis of Compensation Topology: Analyze the type of compensation topology and derive the theoretical parameters. Select the appropriate model according to requirements such as anti-offset capability and lightweight design, or introduce new theoretical approaches[11].
2. Abstract Modeling: Select the final structural components to be broken down into quantifiable parameters before proceeding with formal research, facilitating subsequent studies.
3. Optimization of Structural Parameters: The wireless charging system consists of many parameters, and the correlation between each parameter and the performance indices exhibits nonlinear characteristics, along with coupling and synergistic influences. It is often time-consuming and labor-intensive to optimize the magnetic coupling mechanism using exhaustive methods or modeling approaches. Currently, single-objective or multi-objective algorithms are commonly employed to meet requirements, identifying suitable optimization algorithms through testing and comparison, followed by multiple iterations to converge on the ideal values[12].
4. Design of Wireless Charging Transmission Systems: Design of the wireless charging transmission system: the primary considerations for the design of the system should be the transmission distance and the output power of the inductive wireless power transmission system, which will determine the type of inverter to be used and the setting of the parameters[12]. Secondly, the structure of these coils must be designed since the loose coupled transformer formed by the transmitting and receiving coils is critical to the design. In order to transmit power efficiently, the reactive power compensation method should be selected based on the load requirements and the connection between the reactive power compensation network and the coils should be determined. Finally, the control design of the system should be completed to provide options for open-loop and closed-loop control.
5. Functional Control: After meeting the requirements of the actual use scenario, explore the equipment and parameter conditions for stabilizing the output (constant current or constant voltage), so as to make the system work continuously and ensure the quality and life of the devices[13].And it is important for researchers to take into account as much as possible the anomalies that occur between the coupling effects of the devices[14].
6. Simulation Verification: Researchers need to build an experimental platform for the wireless charging system. This includes the design and construction of hardware circuits, as well as the development of corresponding software algorithms. The hardware circuit comprises key components such as the controller, inverter, and rectifier circuit. The software algorithm is responsible for implementing constant voltage and constant current output control. Ultimately, by comparing experimental results with simulation results, the authors can verify the real performance of the designed structure and provide improvement suggestions based on these results.
3.1. Hover Direction
The first paper is titled “Nonlinear Parity-Time-Symmetric Model for Constant Efficiency Wireless Power Transfer: Application to a Drone-in-Flight Wireless Charging Platform” [15].
This thesis analyzes and designs Wireless Power Transfer (WPT) systems by applying Coupled-Mode Theory (CMT) and nonlinear (Parity-Time) symmetry models. The researcher first establishes a nonlinear PT symmetric model based on CMT to derive a dynamic model of the system. Additionally, the thesis utilizes control theory to design a self-oscillating control inverter that achieves nonlinear saturation gain. A significant result of the thesis is that the model can automatically achieve constant output power and constant transfer efficiency despite variations in coupling coefficients. It is also noteworthy that the model simplifies the control system by only requiring current detection at the transmitter end, which greatly streamlines circuit signal processing and enhances accuracy.
The second paper is titled “Model-free constant-current output control for wireless charging of hovering drones” [16].
The researchers investigated the effects of mutual inductance perturbation, load perturbation, and system parameter perturbation on output current based on wireless energy transmission system models of low-order compensated topology (SS) and high-order compensated topology (LCCP). They analyzed the conditions under which output current is independent of load impedance across different compensated topologies. A model-free constant current output control model based on artificial neural networks (ANN) and radial basis function (RBF) networks was also developed for dynamic mutual inductance estimation. The innovation of this thesis lies in the application of neural networks in the field of artificial intelligence for model training and optimization, providing a new approach for the continuous optimization of mutual inductance estimation.
3.2. Landing Platform Direction
The first paper is titled “Research on Wireless Charging System for Unmanned Aerial Vehicles with Drop Point Position Capture Function” [17].
This thesis analyzes the compensation network for wireless energy transmission, including low-order S-compensation and P-compensation, as well as high-order LCC-compensation, in order to achieve zero input impedance and load-independent constant voltage output. The most significant innovation of the thesis is the modular stacking approach used to design the primary side coil and to analyze and design the control strategy for coil switching. To enable simple and effective capture of the UAV landing point, the average current of the inverter bridge bus is selected as a parameter in the coil switching control strategy. Additionally, to enhance the stability of the output voltage gain, the full-bridge inverter is modeled, and the principles of closed-loop control are analyzed and designed.
The second paper is titled “Magnetic Coupling Mechanism Offset Performance of Wireless Charging System for Rotary Wing UAVs: Performance Enhancement Study” [18].
In this thesis, the output characteristics of resonant and non-resonant wireless charging systems are first elucidated, and the detuned SS compensation topology is ultimately chosen. Regarding the magnetic coupling mechanism, the authors explain in detail the reasons for selecting the BPSO algorithm and the NSGA algorithm. In their study, both single-objective and multi-objective optimization algorithms are employed to optimize the parameters of the magnetic coupling mechanism in order to improve the system’s offset performance. Additionally, the authors use an orthogonal experimental method to select the mechanism’s shape and choose the return coil based on comprehensive considerations. Finally, an experimental platform is built to verify the performance of the designed magnetic coupling mechanism experimentally.
4. Conclusion
Wireless charging technology is a powerful enabler for enhancing the application of UAVs in future unattended scenarios. The research in this technology is of great significance for expanding the range of UAV missions and improving system intelligence. This paper summarizes the research results and developments in wireless charging for UAVs, dividing the topic into two main research directions: hovering and landing. Based on this division, it outlines three types of hot spot issues that are currently widely researched, providing specific research papers as examples. It then analyzes the two directions—hovering and landing—through a detailed examination of relevant papers. The findings indicate that wireless charging technology for UAVs is being explored in depth, and it can be expected that this technology will continue to be extensively researched, applied, and developed.
However, it is important to note that several aspects of the current research still require improvement in future studies, which I believe include the following:
1. Optimizing Parameter Algorithms: In the future, we should consider exploring more advanced neural network architectures or artificial intelligence algorithms to enhance the dynamic performance and adaptive capabilities of the control scheme. Additionally, increasing the number of iterations could lead to more accurate results. When the scale of the number of UAVs gradually reaches a system, the researcher will not only have to consider the optimization of the parameters of individual UAVs, but will have to take them into account comprehensively using more accurate algorithms[19].
2. Control Strategy Improvement: The current constant current and constant voltage strategy primarily relies on current sampling to achieve efficient and straightforward control. Future research could introduce more variables to further reduce mutual inductance perturbations while building on the original control model[20].
3. Increasing Experimental Links: Current simulation tests remain too idealized and do not fully account for external environmental factors such as temperature, light, and wind. Consequently, most designs for perturbation remain confined to the circuit itself.
References
[1]. Zhao Zhengming, Zhang Yiming, and Chen Kainan. New Advances in Magnetically Coupled Resonant Radio Power Transmission Technology[J]. Proceedings of the CSEE, 2013, 33(03):1-13+21. DOI: 10.133 4/j.0 258-8013.pcsee.2013.0 3.003.
[2]. YANG Qingxin, ZHANG Pengcheng, ZHU Lihua, et al. Key foundations and technical bottlenecks of wireless energy transmission technology[J]. Journal of Electrotechnology, 2015, 30(05):1-8.DOI:10.19595/j.cnki.1000-6753.tces.2015.05.001.[12]
[3]. Gao, J. (2020). Research on wireless charging system for UAV cluster [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2020.002008.
[4]. Huang, J. (2022). Research and design of wireless charging array coil system based on magnetic coupling resonance [Master’s thesis, Southwest University of Science and Technology]. DOI: 10.27415/d.cnki.gxngc.2022.000069.
[5]. Jiang, L. (2021). Wireless charging system for UAV based on orthogonal magnetic field coupling [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2021.004562.
[6]. Wang, Xingqi. Research on the coupling mechanism and composite compensation topology of wireless charging system for unmanned aircraft[D]. Chongqing University, 2021.DOI:10.27670/d.cnki.gcqdu.2021.003289.
[7]. Sun, H. (2023). Research on key technology of wireless charging system for UAV [Master’s thesis, Tianjin Polytechnic University]. DOI: 10.27357/d.cnki.gtgyu.2023.000872.
[8]. Yu, L. (2023). Efficiency study of wireless charging system for UAV and its coil design [Master’s thesis, Southwest University of Science and Technology]. DOI: 10.27415/d.cnki.gxngc.2023.001076.
[9]. Zhang, P. (2021). Design of high power density modular wireless charging system applied to UAVs [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2021.002740.
[10]. Cai, C., Wang, J., Nie, H., Zhang, P., Lin, Z., & Zhou, Y.-G. (2020). Effective-configuration WPT systems for drones charging area extension featuring quasi-uniform magnetic coupling. IEEE Transactions on Transportation Electrification, 6(3), 920-934. https://doi.org/10.1109/TTE.2020.2995733
[11]. Chen Chen. Research on several electromagnetic problems and optimal design of resonant wireless energy transmission system[D]. Southeast University, 2016.
[12]. Dou Yanjun. Design of a magnetically coupled resonant wireless charging system[D]. University of Electronic Science and Technology, 2013.
[13]. Zhao Xin. Research on UAV hovering wireless charging technology based on wireless energy transmission mode [D]. Chongqing University, 2015.
[14]. Ye Juncen. Design of hovering wireless charging power transmission and communication scheme for multi-rotor UAV[D]. Zhejiang University, 2023.DOI:10.27461/d.cnki.gzjdx.2023.001584.
[15]. Zhou, J., Zhang, B., Xiao, W., Qiu, D., & Chen, Y. (2019). Nonlinear parity-time-symmetric model for constant efficiency wireless power transfer: Application to a drone-in-flight wireless charging platform. IEEE Transactions on Industrial Electronics, 66(5), 4097-4107. https://doi.org/10.1109/TIE.2018.2864515
[16]. Shen Shen. Model-free constant current output control for UAV hovering wireless charging[D]. Tianjin University, 2021.DOI:10.27356/d.cnki.gtjdu.2021.004260.
[17]. Wang, S. (2020). Research on wireless charging system for UAV with drop point position capture function [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2020.003180.
[18]. Liu, H. (2023). Research on magnetic coupling mechanism offset performance enhancement of wireless charging system for rotary wing UAV [Master’s thesis, Northeast Forestry University]. DOI: 10.27009/d.cnki.gdblu.2023.000215.
[19]. An Ziwen. Research on charging efficiency maximization strategy for UAV-assisted wireless rechargeable sensor networks[D]. Jilin University, 2023.DOI:10.27162/d.cnki.gjlin.2023.001298.
[20]. Liu Fang, Chen Kainan, Jiang Ye, et al. Research on optimal control strategy for efficiency optimization of two-way wireless energy transmission system[J]. Journal of Electrotechnology, 2019, 34(05):891-901.DOI:10.19595/j.cnki.1000-6753.tces.180143.
Cite this article
Yang,Y. (2024). An Overview of Key Technologies for Wireless Charging Systems for Unmanned Aerial Vehicles. Applied and Computational Engineering,99,103-111.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 5th International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Zhao Zhengming, Zhang Yiming, and Chen Kainan. New Advances in Magnetically Coupled Resonant Radio Power Transmission Technology[J]. Proceedings of the CSEE, 2013, 33(03):1-13+21. DOI: 10.133 4/j.0 258-8013.pcsee.2013.0 3.003.
[2]. YANG Qingxin, ZHANG Pengcheng, ZHU Lihua, et al. Key foundations and technical bottlenecks of wireless energy transmission technology[J]. Journal of Electrotechnology, 2015, 30(05):1-8.DOI:10.19595/j.cnki.1000-6753.tces.2015.05.001.[12]
[3]. Gao, J. (2020). Research on wireless charging system for UAV cluster [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2020.002008.
[4]. Huang, J. (2022). Research and design of wireless charging array coil system based on magnetic coupling resonance [Master’s thesis, Southwest University of Science and Technology]. DOI: 10.27415/d.cnki.gxngc.2022.000069.
[5]. Jiang, L. (2021). Wireless charging system for UAV based on orthogonal magnetic field coupling [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2021.004562.
[6]. Wang, Xingqi. Research on the coupling mechanism and composite compensation topology of wireless charging system for unmanned aircraft[D]. Chongqing University, 2021.DOI:10.27670/d.cnki.gcqdu.2021.003289.
[7]. Sun, H. (2023). Research on key technology of wireless charging system for UAV [Master’s thesis, Tianjin Polytechnic University]. DOI: 10.27357/d.cnki.gtgyu.2023.000872.
[8]. Yu, L. (2023). Efficiency study of wireless charging system for UAV and its coil design [Master’s thesis, Southwest University of Science and Technology]. DOI: 10.27415/d.cnki.gxngc.2023.001076.
[9]. Zhang, P. (2021). Design of high power density modular wireless charging system applied to UAVs [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2021.002740.
[10]. Cai, C., Wang, J., Nie, H., Zhang, P., Lin, Z., & Zhou, Y.-G. (2020). Effective-configuration WPT systems for drones charging area extension featuring quasi-uniform magnetic coupling. IEEE Transactions on Transportation Electrification, 6(3), 920-934. https://doi.org/10.1109/TTE.2020.2995733
[11]. Chen Chen. Research on several electromagnetic problems and optimal design of resonant wireless energy transmission system[D]. Southeast University, 2016.
[12]. Dou Yanjun. Design of a magnetically coupled resonant wireless charging system[D]. University of Electronic Science and Technology, 2013.
[13]. Zhao Xin. Research on UAV hovering wireless charging technology based on wireless energy transmission mode [D]. Chongqing University, 2015.
[14]. Ye Juncen. Design of hovering wireless charging power transmission and communication scheme for multi-rotor UAV[D]. Zhejiang University, 2023.DOI:10.27461/d.cnki.gzjdx.2023.001584.
[15]. Zhou, J., Zhang, B., Xiao, W., Qiu, D., & Chen, Y. (2019). Nonlinear parity-time-symmetric model for constant efficiency wireless power transfer: Application to a drone-in-flight wireless charging platform. IEEE Transactions on Industrial Electronics, 66(5), 4097-4107. https://doi.org/10.1109/TIE.2018.2864515
[16]. Shen Shen. Model-free constant current output control for UAV hovering wireless charging[D]. Tianjin University, 2021.DOI:10.27356/d.cnki.gtjdu.2021.004260.
[17]. Wang, S. (2020). Research on wireless charging system for UAV with drop point position capture function [Master’s thesis, Harbin Institute of Technology]. DOI: 10.27061/d.cnki.ghgdu.2020.003180.
[18]. Liu, H. (2023). Research on magnetic coupling mechanism offset performance enhancement of wireless charging system for rotary wing UAV [Master’s thesis, Northeast Forestry University]. DOI: 10.27009/d.cnki.gdblu.2023.000215.
[19]. An Ziwen. Research on charging efficiency maximization strategy for UAV-assisted wireless rechargeable sensor networks[D]. Jilin University, 2023.DOI:10.27162/d.cnki.gjlin.2023.001298.
[20]. Liu Fang, Chen Kainan, Jiang Ye, et al. Research on optimal control strategy for efficiency optimization of two-way wireless energy transmission system[J]. Journal of Electrotechnology, 2019, 34(05):891-901.DOI:10.19595/j.cnki.1000-6753.tces.180143.