






1. Introduction
For the traditional manual welding, it has low efficiency and poor accuracy. Moreover, the manual work is not only time-consuming and laborious, but also high-intensity. Sometimes the workers even have to face poisonous and dangerous environments. Recently, the industrial welding robots are gradually being appreciated and widely used in the industrial producing to replace manual producing due to their advantages like high accuracy, persistent work, and fitness for complex environments[1]. The welding robots have already been widely used in industrial producing, especially in the fields that require high welding accuracy like aerospace, and precise instruments, and are gradually replacing manual welding. Although China’s industry scale has expanded to the largest one in the world through several years of development, China is in the period of transferring from high-speed developing into high-quality developing[2]. China still has gaps between western countries in some high-level manufacturing fields. With the increasing scale of China’s industry, demands for industrial welding robots will also increase. The research of welding robots is linked with the development of advanced mechanical engineering, fundamental materials, processing technology, electronic control and other fields, which mean difficulties in research[3]. Therefore, it is of great importance for Chinese industry to analyze the current developing situation and predict the develop tendency of welding robots.
The article will focus on the development of industrial welding robots. In this article, advantages between manual and robot welding are compared in detail. The mature technologies are summarized. And the current welding robots market scale is analyzed. The defects of welding robots are put forward. This paper may offer a reference for the future development direction of welding robot.
2. Current development status of welding robots
2.1. Outline to welding robots
“Industrial robots” refer to multi-functional programmable manipulators used for transporting mechanical components or workpieces, or special mechanical devices that can complete various tasks by changing the program. Nowadays, the application of industrial robots is continuously expanding. Robots can replace manual labor to complete complex tasks such as assembly, welding, and polishing. The welding robot is one of the important driving forces for the development of modern industry. At present, welding robots in China are mainly used in the manufacturing of automobiles and their components, motorcycles, engineering machinery, and other fields[4].
There are various types of welding robots. From the technical level, they can be classified into the following 3 generations: the 1st generation of "teaching and reproducing" welding robots, the 2nd generation of offline programming welding robots based on sensing technology and the 3rd generation of intelligent welding robot. From the perspective of process methods, welding robots can be classified into spot welding robots, arc welding robots, friction stir welding robots, laser welding robots and plasma welding robots; From the perspective of structural form, welding robots can be classified into 4 types: Cartesian coordinate system type, cylindrical coordinate type, spherical coordinate type, and full joint type; From the perspective of controlled motion mode, welding robots can be classified into 2 types: point control type and continuous trajectory control type; From the perspective of driving methods, welding robots can be classified into 3 types: pneumatic drive, hydraulic drive, and electrical drive[5].
Welding robots have attracted worldwide attention for their low cost, high efficiency, high reliability, and high flexibility in industrial production. Since the birth of the first welding robot, the welding robot has expanded from the initial spot-welding robot to more than ten welding fields, such as gas metal arc welding, gas tungsten arc welding, submerged arc welding, friction stir welding, laser welding, plasma welding, and gas welding. The scope of work has extended from indoor to outdoor, underwater, space, and polluted environment. Welding robots are gradually liberating welding workers from high fatigue and high-risk working environments[5].
In recent years, intelligent welding robots have also been widely used in industry. Intelligent welding robots have sensing systems, such as laser sensors and control devices. Overall, the application of welding robots is becoming increasingly widespread, and at the same time, the emergence of new technologies has also driven welding robots to have greater application space.
2.2. Current market size
In the field of welding robots, the proportion of resistance welding robots in the international market is 7.29% in 2020, ranking fifth in the world. Arc welding robots occupy 13.01% of the international market, ranking third in the world. Laser welding robots have a market share of 21.65% in the international market and rank second in the world in 2020. In the 10 years from 2010 to 2020, the international market share of arc welding robots and laser welding robots has increased by more than 10%, while the international market share of resistance welding robots has hardly changed[6].
From a global perspective, the industrial robot industry belongs to a monopolistic competitive market, and the price differences of similar products reflect the technological content of the products. In 2018, the average unit prices of Laser welding robot, arc welding robot and resistance welding robot of welding robots exported by China were $630, $190, and $80, respectively. The average unit price of exports from the United States is $7610, $2360, and $17620, respectively[6]. Compared to the United States, there is a price difference of more than 10 times in China's exports, especially for laser welding robots, which is as high as 100 times.
Another issue reflected by the price gap is the characteristic of China's industrial robot industry crowding out the low-end international market of industrial robots at low prices. Although China is already at the forefront of the world in terms of international market share, this competitiveness is achieved by occupying the low-end international market at a low price. There is a significant gap between the technological content and value of products and industrial robot giants. Therefore, improving the technological content and value of products, innovating and creating, and upgrading industries are the future development direction of Chinese robots.
3. Research status of the welding robots
In the automobile industry, welding robot is mainly used in body welding, seat assembly and other processes. In the electronics manufacturing industry, welding robots are used in spot welding, wire welding, surface welding and other processes of electronic components. In the whole manufacturing industry,the welding robot is widely used in welding, cutting torch, coating and other processes. Welding robots are now becoming more and more intelligent and can realize autonomous control, learning and collaboration through a variety of sensors such as vision, sound and vibration, and remote control. In addition, the welding robot is simple to operate. Compared with the previous large welding robot, there are more and more small lightweight robots with relatively simple operation. These small robots can quickly replace different welding gun and fixture, improve the efficiency of welding work. At the same time, technological innovation continues, such as weld tracking technology, remote welding technology, special arc welding power supply technology.
3.1. Welding seam tracking technology
Welding seam tracking technology is a kind of sensor, vision system and control algorithm technology to enable the welding robot to automatically identify the position of the weld, shape, length and other information, combined with a variety of technologies to control the blow torch in real time, among which the sensor technology is quite a measuring tool, using the sensor real-time perception of various data which is including welding current, voltage, arc length, welding gun position and other information in the welding process , and then detect and measure the weld[7].
The visual system is equivalent to human eyes. It obtains weld shape, position and other information by using cameras, lasers and other equipment, and realizes weld identification, position confirmation and tracking through image processing algorithm. The control algorithm technology is equivalent to the human brain. According to the information obtained by the sensor and vision system, the movement, attitude and speed of welding robot welding gun can be controlled, so as to accurately track the welding seam and realize automatic control.
Welding seam tracking technology improves the quality of the welding position, greatly reduces the rate of unqualified products, improve the work efficiency, at the same time in some poor working environment, can replace the human welding, protect the health and safety of workers, reduce the production cost of enterprises. Weld tracking technology is widely used in automotive industry, aerospace, large ship welding and other occasions.
3.2. Multi-robot cooperative control technology
At present, many scholars have put forward a lot of practical and concrete solutions for the treatment and research of the coordination work of dual-robot, such as using Matlab to build a model for collision experiment, simulation of 2 coordinated motion modes of dual-robot, collision test of dual-robot system, reduce the accident rate in practical operations, and plan the motion trajectory during coordinated motion, make it complete the required coordination action. In terms of coordination control, there are double robot coordination control system through touch screen and PLC control to complete the coordination handling task, as well as multi-robot master-slave coordination motion control system. In the actual control, multiple coordinated motion robots are divided into active robot and slave robot. The active robot plans displacement, speed and acceleration according to the actual work needs. The slave robot determines the corresponding value through the master-slave relation. Mentioned through the use of PLC technology, realize master and slave control movement, also effectively reduces the error[8]. In the field of robot welding, a teaching method for the coordination of double robot welding operation and a method to determine the motion path of the slave robot according to the trajectory of the end of the active robot are proposed[9].
The key technologies and difficulties of multi-robot cooperation mainly include the following points:
(1) The multi-robot cooperation system should avoid interference, collision and other specific problems while completing the task planning, and ensure the simultaneous work of multiple robots.
(2) For complex tasks to be completed, due to the low degree of freedom and poor flexibility of some robots, the selection of some initial positions may not guarantee the correct and effective completion of tasks among multiple robots.
(3) When multiple welding robots work together, at this time, the robot combine with the workpiece and the contact between each other produces a force. At this time, how to effectively solve the force and protect the workpiece without damage has become an important problem.
3.3. Path planning technology
Path planning technology is not only to design a shortest path, but also to plan out an optimal route according to the specific operation scenario and processing technology requirements[10]. In daily life, the most common example of this is the robot sweeper. The general steps of path planning are building the environment, searching, and smoothing. The path planning helps welding robot reduce welding path, complete welding work efficiently, shorten working time and save working cost. The path planning of welding robot has 3 key points[11]:
(1) The path planning should consider the practical feasibility, the welding accuracy and the degree of freedom of the robot;
(2) Optimized welding path planning;
(3) Path planning should avoid collision.
The classification of path planning algorithm is shown in figure 1. At present, the commonly used path optimization algorithms mainly include grid method and artificial potential field method, but these traditional algorithms have the defect of low efficiency. Nowadays, more intelligent optimization algorithms appear, such as ant colony algorithm, genetic algorithm, and neural network algorithm[10].
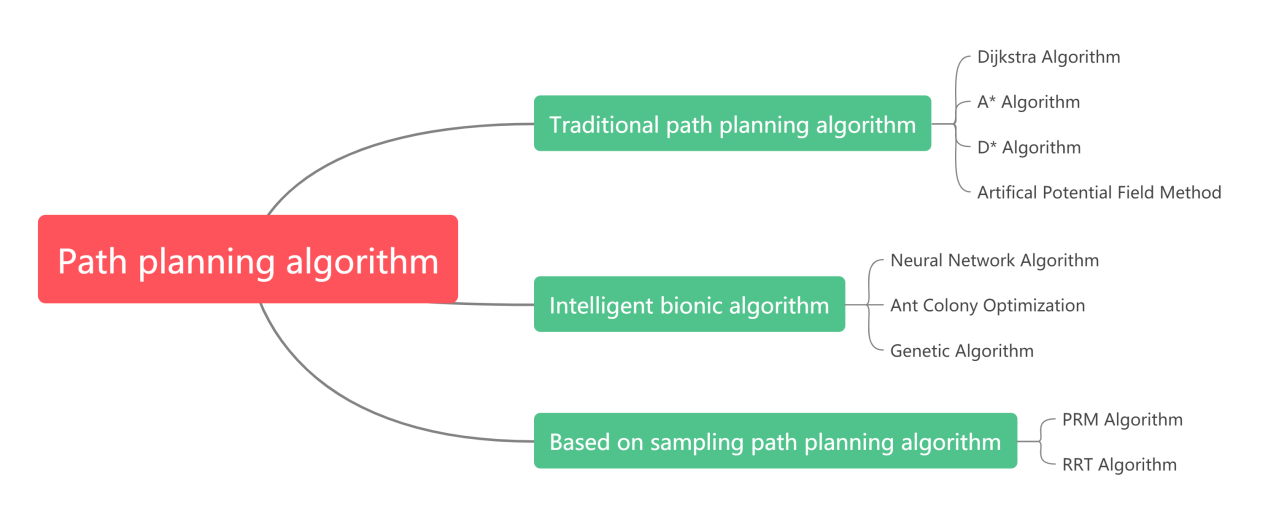
Figure 1. Classification of Path Planning Algorithm.
4. Conclusion
With the gradual increase of labor costs, many jobs are no longer suitable for manual operation for a long time, such as welding, grinding, spraying, handling and so on. Industrial welding robot has always been a hot focus in the field of industrial robot, the scope and depth of robot application is also considered to be an important reflection of the automation level of the production line. This paper analyzes the market development of welding robots, compares the advantages of machine welding and manual welding, and studies the key technologies related to welding robots. The analysis shows that the welding robot has obvious advantages compared with manual welding, and many high-end technologies such as weld tracking technology and multi-robot cooperation technology have been mature and widely applied. In the future, the use of welding robots will be greatly increased. The current welding robot still has some shortcomings, including the limitation of welding robot in narrow working space, difficult to complete the work requiring high degree of freedom, collision and interference caused by multi-robot work. However, the development of industrial welding robot is inevitable, the development of welding robot still needs to explore. It is expected that the scale of the welding robot market will gradually expand. With the development of welding robot technology, its application continues to expand. In order to enhance the production efficiency, precision requirements and operability, the following technologies are necessary for welding robots:
1. Intelligence: In the future, welding robots will be combined with artificial intelligence to automatically optimize the path algorithm when encountering complex routes in industrial welding. The intelligence of welding robots is mainly reflected in the sensing technology of welding robots on welding dynamics, intelligent control of welding robots in welding dynamics and welding quality.
2. Multi-agent regulation technology: perception and learning methods, modelling and planning, group behaviour control.
References
[1]. Sun J 2021 Research on Development and Application of Welding Robot Technology, Technology &Management 19 55-56.
[2]. Wang D 2022 From Industrial Self-Sufficiency to Technological Self-Reliance: The Evolution of China’s Industrial Development Strategies, Studies on Mao Zedong and Deng Xiaoping Theories 12 11-21.
[3]. Wang L, Ma S 2023 Research on Application and Intelligent Development Trend of Industrial Welding Robot, China Plant Engineering 3 33-35
[4]. Huo H, Zhang H, Du Q, Huang S, and Qiu Y 2017 Application Status and Development Trend of Welding Robot in China, Welded Pipe and Tube 40(2) 36-42
[5]. Ji S, Huang X 2017 Review of Development and application of industrial robot technology, Journal of Mechanical & Electrical Engineering 32(1) 1-13
[6]. Wang N 2021 Practice in Foreign Economic Relations and Trade 8 65-70
[7]. Zhang G, Tuo S, Cao X, Hou Z, Yang W, Xu Z, and Bao X 2021 The State-of-the-art and Developing Trends of Weld Seam Tracking Technology of Welding Robot, Science Technology and Engineering 10 3868-3876.
[8]. Cao H, Zhang Y 2023 Computer Measure & Control
[9]. Zhang R 2019 Trajectory Playing of Double Robot Welding Collaborative Operation Guangxi University of Science and Technology.
[10]. Wang H, Wang L 2022 Journal of Guilin University of Technology
[11]. Fan Q, Cai Y, Jia S 2023 Path Planning of Welding Robot Based on Optimized Genetic Algorithm, Machinery 50(1) 68-73
Cite this article
Liu,Z.;Wang,J.;Wu,J.;Xing,A. (2023). Research and expectation on industrial welding robots. Applied and Computational Engineering,11,263-267.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2023 International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Sun J 2021 Research on Development and Application of Welding Robot Technology, Technology &Management 19 55-56.
[2]. Wang D 2022 From Industrial Self-Sufficiency to Technological Self-Reliance: The Evolution of China’s Industrial Development Strategies, Studies on Mao Zedong and Deng Xiaoping Theories 12 11-21.
[3]. Wang L, Ma S 2023 Research on Application and Intelligent Development Trend of Industrial Welding Robot, China Plant Engineering 3 33-35
[4]. Huo H, Zhang H, Du Q, Huang S, and Qiu Y 2017 Application Status and Development Trend of Welding Robot in China, Welded Pipe and Tube 40(2) 36-42
[5]. Ji S, Huang X 2017 Review of Development and application of industrial robot technology, Journal of Mechanical & Electrical Engineering 32(1) 1-13
[6]. Wang N 2021 Practice in Foreign Economic Relations and Trade 8 65-70
[7]. Zhang G, Tuo S, Cao X, Hou Z, Yang W, Xu Z, and Bao X 2021 The State-of-the-art and Developing Trends of Weld Seam Tracking Technology of Welding Robot, Science Technology and Engineering 10 3868-3876.
[8]. Cao H, Zhang Y 2023 Computer Measure & Control
[9]. Zhang R 2019 Trajectory Playing of Double Robot Welding Collaborative Operation Guangxi University of Science and Technology.
[10]. Wang H, Wang L 2022 Journal of Guilin University of Technology
[11]. Fan Q, Cai Y, Jia S 2023 Path Planning of Welding Robot Based on Optimized Genetic Algorithm, Machinery 50(1) 68-73