






1. Introduction
The use of traditional fossil fuels has brought serious environmental pollution problems. The pursuit of greener and environmentally friendly energy to reduce environmental pollution and achieve sustainable social development is receiving increasing attention. The urgent need to address environmental concerns and reduce greenhouse gas emissions has propelled the development and adoption of electric vehicles (EVs) as a viable alternative to internal combustion engine (ICE) vehicles [1]. By substituting ICE with electric motors, EVs eliminate the direct emission of pollutants, including carbon dioxide (CO2), nitrogen oxides (NOX), and particulate matter (PM). Consequently, EVs represent a promising solution in the global effort to combat climate change, improve air quality, and foster sustainable development.
As EVs gain traction in the transportation landscape, the development and understanding of efficient and practical charging options become paramount. With the progress of EVs charging technology, three primary charging methods are adopted. Conductive charging is a widely used method that involves transferring electrical energy through physical connections. It typically utilizes charging cables and plugs to establish a direct electrical connection between the EVs and the charging station. At present, EVs operators prefer them because of their low price, great efficiency, and clear business strategy. Inductive charging is an emerging method for charging EVs that involves wirelessly transferring electrical energy through an air gap from a charging pad or plate to the EV’s onboard charger. It utilizes electromagnetic fields generated between a transmitting pad on the ground and a receiving pad on the EVs to transfer power without the use of physical connectors. EVs can simply park over the charging pad for automatic charging. However, it typically has lower charging efficiency compared to conductive charging and requires specialized charging infrastructure installation. Battery exchange is an alternative approach that involves replacing the drained battery with a completely charged one. The stations for battery replacement typically use automated systems to remove the discharged battery from the EVs and install a charged battery in its place. It offers a rapid charging solution by eliminating the time required for charging. However, implementing a widespread battery exchange infrastructure poses challenges, mainly due to its high cost.
There are various challenges to deploying EVs. Due to the limited driving range of an EV per charge, range anxiety has become a prevalent issue experienced by EVs drivers, denoting the apprehension arising from the possibility of depleting the battery’s charge before reaching the intended destination. Therefore, it has brought forth a pressing need for robust charging infrastructure to support the growing quantity of EVs. As the number of EVs increases, more electric vehicle charging stations (EVCS) need to be built at appropriate locations to fulfil the charging requirements of these vehicles [2]. Apart from that, shorter charging times and safe use of EVs are other aspects that limit the overall driving experience and hinder the widespread acceptance and integration of EVs. This research is going to analyze these challenges and discuss the current research effort to address them.
2. Range anxiety
One significant concern that continues to plague EVs adoption is range anxiety. It is rooted in the limitations of current EVs technology, mainly the limited energy storage capacity of batteries, which impact the distance an EV can travel on a single charge. The EVs typically rely on lithium-ion batteries, which offer a finite amount of energy. The range of EVs on a single charge is still shorter than that of ICE vehicles despite the huge rise in lithium-ion battery energy density to roughly 300 Wh/kg. This is owing to the greater energy density of petroleum at around 12,000 Wh/kg [3]. The average moving range of EVs is about 300 miles, as shown in Table 1. As a result, researchers are striving to improve battery technology and extend range capabilities, as reviewed by Wen et al., to make EVs a viable and practical choice for drivers seeking sustainable transportation options [4].
Table 1. Driving range of different EVs models [5].
Model | Battery capacity (kWh) | Driving range (miles) |
Nissan Leaf 62 kWh | 62 | 226 |
Chevy Bolt EV | 60 | 238 |
Hyundai Kona Electric | 64 | 258 |
Tesla Model 3 Long Range | 75 | 310 |
Tesla Model S 100D | 100 | 370 |
3. Accessibility of charging stations
EVs integration into the present transportation networks is particularly challenging, despite the fast development of smart grid systems. Simply increasing the number of EVs without sufficient charging stations would make EVs less practical to use [6]. According to the statistics, as of November 2022, there were over 2.3 million charging stations worldwide. There has been a significant increase in the number of EVCSs, as there were only about 4,000 EVCSs available globally in 2010. Even with this steep rise in the number of EVCS, the global ratio was still at a very low level of 10 EVs per charger at 2.4 kW per EV. The insufficient EVCSs will largely affect the uptake of EVs, since a poll found that 9 in 10 of EV buyers will give up purchasing the car due to the shortage of charging stations [7].
To increase the accessibility of charging stations, the majority of nations are actively working to secure a lower ratio of EVs to charging stations. For example, as of now, China has been striving to bring down the global mean ratio, which is now 7 EVs per charger at 3.8 kW per EV. In addition, due to the long-standing nature of the problem and the high construction fees of charging stations, many researchers have proposed various models and algorithms to study the EVs charging station placement problem (EVCSPP). The model comprehensively considers factors such as overall energy loss and total cost, user behavior and preferences, charging demand, and environmental and geographic conditions [8]. The goal of these models is to find the ideal spot to build the charging stations where an EV can always reach a charging station within its driving range; at the same time, the distance between them are maximized such that the construction cost is minimized in the most environmentally friendly way. Due to the nondeterministic polynomial-time (NP) nature of this problem, most famous approaches have been discussed by Lam et al. to address EVCSPP [6]. These include iterative mixed-integer linear program (MILP) method solved with standard MIP solvers, greedy approach presented as an efficient greedy algorithm, effective MILP method applicable to all non-optimal solutions, and for multifunctional challenges, the chemical reaction optimization method to converge to the world optimum.
4. Charging time
Recharging the battery in an EV is one of the most significant challenges, since it takes a longer time than refuelling the oil in an ICE vehicle, and the driving range per charge is also shorter in ICE vehicles. As the development of lithium-ion batteries has advanced greatly in recent years, EVs are now more cost-effective and viable. However, Li-ion battery degradation and recharging rate constraints owing to electrochemical reactions, remain significant barriers to widespread acceptance of EVs. The lack of charging stations that are parallel to the existing gasoline stations to quickly recharge EVs and extend the driving range over a longer driving distance hinders the adoption of EVs [9]. As a result, to reduce the charging time, a diverse of different research focuses on the four main factors discussed below, which will have an impact on the time taken for the fast charging system.
The charging time of the battery is positively related to its capacity measured in kWh. The battery capacity of EVs is normally between 20-100 kWh. For batteries with a larger capacity, the charging time increases. The state of charge (SOC) of the battery indicates whether the battery is completely charged, completely discharged, or in between. With different SOC, the charging rate varies. For example, when SOC is low during recharging, it is much easier for the electrons to find empty seats to fill in another electrode, thus the rate of flow of electrons is faster; when SOC is high, the charging speeds will be slower. The vehicle can be charged at its maximum rate only. For example, for an EV battery with a maximum charging rate of 30 kW, it cannot be charged using a charging system with a charging rate larger than 30 kW. The charging time is determined by the rating of the charge point to which the battery is attached. For instance, to charge a battery of 30 kW using a 20 kW outlet, it will charge the battery at the same rate as 20 kW. As shown in Table 2, it summarizes the charging times of different EVs models with charging rates from 3.7 kW to 150 kW [2].
Table 2. Charging times of different vehicles models [2].
Model | Battery capacity (kWh) | Range (miles) | Charging time (hours) | ||||
3.7 kW | 7 kW | 22 kW | 43-50 kW | 150 kW | |||
Nissan Leaf | 40 | 143 | 11 | 6 | 6 | 1 | NA |
Tesla Model S | 75 | 238 | 21 | 11 | 5 | 2 | 1 |
Mitsubishi Outlander PHEV | 13.8 | 24 | 4 | 4 | 4 | 0.66 | NA |
Given an appropriate driving range in a typical driving situation, there is a requirement for building a charging station that can refuel the EVs batteries in a shorter amount of time compared to gasoline refuelling time at a gas station. In order to satisfy both current and future EVs charging demands, emerging extreme fast charging (XFC) technology has an opportunity to provide a recharging process equivalent to that of gasoline automobiles. For example, if energy consumption per 10 miles is 3 kWh, chargers with rate at 7.2 kW require about 4 hours to add 100 miles of range to the EVs. While a 50 kW fast charger still requires about half an hour to increase a driving range of 100 miles, the 135 kW Tesla supercharger only takes about 10 minutes. Furthermore, the recently proposed 350 kW DC ultra-fast chargers using XFC technology can reduce the time of adding 100 miles of range to 5 minutes, which is commensurate with the refuelling time at a gas station [5].
However, because XFC stations demand more charging efficiency, developing and implementing systems capable of providing such high power becomes more challenging and costlier. When all essential electrical service improves, such as transformer and feeder upgrades, ground conditions, piping from power supply to service transformer, and plumbing from transformer to fast charger, are considered, the installation cost of an XFC station is very high, with an important portion of it related to improving electrical services. Consequently, building XFC charging stations with multiple chargers is more cost-efficient than building chargers with only one port because several charging ports are used to spread out part of the site development costs. Installation of XFC stations in highly populated locations is made possible by reducing the footprint per port by having several chargers share the same upstream equipment [5].
In addition, to reduce the waiting time in EVCSs, Kim et al. designed a smart charging architecture for smart homes and electric vehicles that includes sensors and processors that may greatly aid vehicle-to-grid (V2G) technology and the intelligent transport system (ITS) to shorten the waiting time at EVCSs [10].
5. Safety considerations
During the charging process of EVs, there are certain safety concerns that need to be addressed, such as the potential for short circuits, the risk of electrolyte leakage, and the possibilities of battery combustion and explosion [11]. These safety hazards can pose risks to both the vehicle and the charging infrastructure, emphasizing the importance of understanding and effectively managing these concerns. Therefore, several administrative standards and regulations have been released. The main focal areas are on the battery pack, the plugs and connectors, and the electric vehicle supply equipment (EVSE) [12]. In particular, the Society of Automotive Engineers (SAE) has issued its standard procedures for charging plug-in electric vehicles (PEVs). The SAE J1772 regulation provides the main physical, electrical, and performance criteria for EV charging stations [13]. The SAE J3068 standard permits EVs to charge their batteries using three-phase AC electricity. To meet the regulatory criteria, PEV charging operating modes should have a high level of security [14].
The policy and research sectors also look at the electrically hazardous aspects of EVCSs from the viewpoint of an EVCS operator. The EVCSs must also be subject to regular safety evaluations, and guidelines are established mandating that the EVCS construction comply with the aforementioned standards criteria. For example, Affonso et al. examined the shortened lifespan of a transformer resulting from inadequate and unsupervised PEV charging in a parking facility [15]. The deterioration and early replacement of transformers can be prevented through the incorporation of photovoltaic (PV) systems and employing smart charging algorithms. According to Naveen et al., the EVCS operator has more flexibility as a result of an updated EVCS communication system, where an information-based control method may minimize hazards and assure safe EVCS charging [16].
At present, it is difficult to quantitatively analyze electrical safety while taking into account the operating circumstances of large-scale EVCSs. To this end, researchers have come up with a system for risk evaluation to examine the electrical safety of EV charging in order to monitor and mitigate the potential hazards involved [17]. The proposed risk management framework of the EVCS is shown in Figure 1 in three categories. To meet the requirements of the risk control measure hierarchy, comprehensive evaluations are performed after analyzing hazards in various categories of EVCS and providing risk assessment analytics [17].
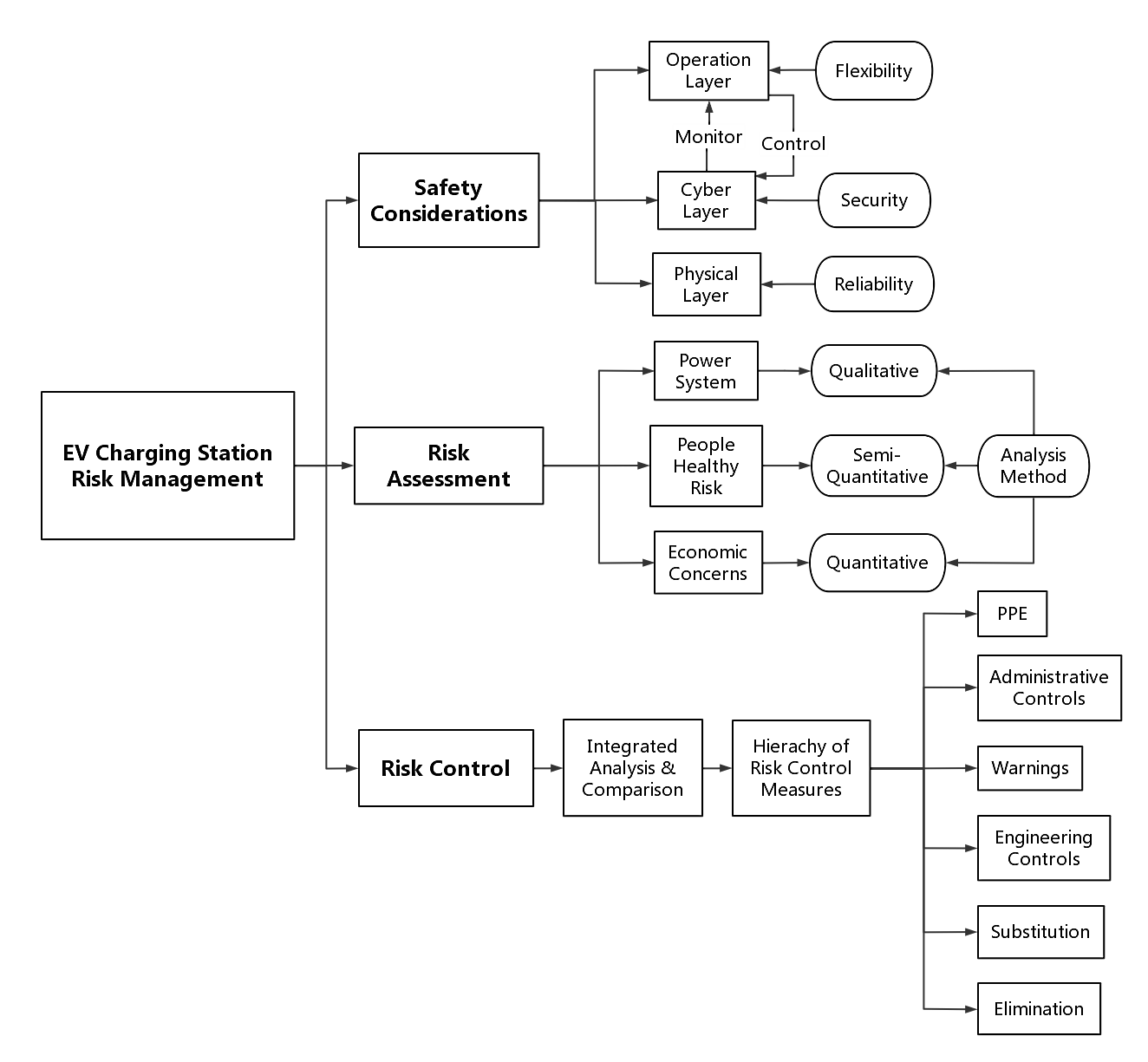
Figure 1. EVs charging station risk management [17].
6. Conclusion
In this research, the challenges of deploying EVs and technologies to address them are discussed. The improvement in the energy density of the batteries will greatly affect the driving range of an EV per charge. Models and algorithms for EVCSPP have been analyzed to increase the accessibility of charging stations. In order to reduce the charging time of EVs, XFC technology has been introduced. Moreover, V2G technology and the ITS help shorten the waiting time at EVCSs. Furthermore, a risk evaluation system to examine the electrical safety of EVs charging is designed, facilitating EVCS operators to assess the electrical security using risk management approaches. While significant progress has been made in addressing these challenges, one prominent limitation that requires attention is the recycling of used batteries. As the number of EVs on the road increases, so does the volume of battery waste, necessitating efficient and sustainable recycling processes. Future developments in battery recycling technologies hold great promise for navigating the path towards a sustainable EVs ecosystem. By embracing these challenges and technologies, we can drive the transition towards cleaner, greener, and more efficient transportation systems powered by EVs, enabling the realization of a sustainable and electrified mobility revolution.
References
[1]. Ahmad A, et al. 2018 J. Smart Sci. 6 no.1 pp 36–53.
[2]. Pareek S et al. 2020 Int. Conf. on Emerging Trends in Communication, Control and Computing (Lakshmangarh) pp 1–6.
[3]. Cano Z P, et al. 2018 J. Nat. Energy 3 no.4 p 279.
[4]. Wen J, et al. 2020 J. Renew. Energy 162 pp 1629–48.
[5]. Tu H, Feng H, Srdic S and Lukic S 2019 IEEE Trans. Transp. Electrification 5 no.4 pp 861–78.
[6]. Lam A Y S, et al. 2014 IEEE Trans. Smart Grid 5 no.6 pp 2846–56.
[7]. Gong D, et al. 2019 IEEE Access 7 pp 138391–402.
[8]. Aljaidi M, et al. 2022 Int. Arab Conf. on Information Technology (Abu Dhabi) pp 1–6.
[9]. Ahmed S, et al. 2017 J. Power Sources 367 pp 250–62.
[10]. Kim B 2013 Int. Conf. on Connected Vehicles and Expo (Las Vegas) pp 306–7.
[11]. Zhang K, et al. 2017 Int. Conf. on Circuits, Devices and Systems (Chengdu) pp 89–94.
[12]. Green J M, Hartman B and Glowacki P F 2016 World Electr. Veh. J. 8 no.2 pp 564–75.
[13]. Falvo M C, et al. 2014 Int. Symp. on Power Electronics, Electrical Drives, Automation and Motion (Ischia) pp 1134–39.
[14]. Freschi F, et al. 2018 IEEE Ind. Appl. Mag. 24 no.3 pp 58–63.
[15]. Affonso C M, et al. 2018 IEEE Power Energy Society General Meeting (Portland) pp 1–5.
[16]. Naveen G, Yip T H and Xie Y 2014 6th IEEE Power India Int. Conf. (New Delhi) pp 1–6.
[17]. Wang B 2019 IEEE Trans. Ind. Appl. 55 no.6 pp 6603–12.
Cite this article
Wang,Y. (2023). The application challenge of electric vehicles. Applied and Computational Engineering,26,86-91.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2023 International Conference on Functional Materials and Civil Engineering
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Ahmad A, et al. 2018 J. Smart Sci. 6 no.1 pp 36–53.
[2]. Pareek S et al. 2020 Int. Conf. on Emerging Trends in Communication, Control and Computing (Lakshmangarh) pp 1–6.
[3]. Cano Z P, et al. 2018 J. Nat. Energy 3 no.4 p 279.
[4]. Wen J, et al. 2020 J. Renew. Energy 162 pp 1629–48.
[5]. Tu H, Feng H, Srdic S and Lukic S 2019 IEEE Trans. Transp. Electrification 5 no.4 pp 861–78.
[6]. Lam A Y S, et al. 2014 IEEE Trans. Smart Grid 5 no.6 pp 2846–56.
[7]. Gong D, et al. 2019 IEEE Access 7 pp 138391–402.
[8]. Aljaidi M, et al. 2022 Int. Arab Conf. on Information Technology (Abu Dhabi) pp 1–6.
[9]. Ahmed S, et al. 2017 J. Power Sources 367 pp 250–62.
[10]. Kim B 2013 Int. Conf. on Connected Vehicles and Expo (Las Vegas) pp 306–7.
[11]. Zhang K, et al. 2017 Int. Conf. on Circuits, Devices and Systems (Chengdu) pp 89–94.
[12]. Green J M, Hartman B and Glowacki P F 2016 World Electr. Veh. J. 8 no.2 pp 564–75.
[13]. Falvo M C, et al. 2014 Int. Symp. on Power Electronics, Electrical Drives, Automation and Motion (Ischia) pp 1134–39.
[14]. Freschi F, et al. 2018 IEEE Ind. Appl. Mag. 24 no.3 pp 58–63.
[15]. Affonso C M, et al. 2018 IEEE Power Energy Society General Meeting (Portland) pp 1–5.
[16]. Naveen G, Yip T H and Xie Y 2014 6th IEEE Power India Int. Conf. (New Delhi) pp 1–6.
[17]. Wang B 2019 IEEE Trans. Ind. Appl. 55 no.6 pp 6603–12.