






1. Introduction
1.1. Background
In modern urban life, pedestrian traffic lights, as an important part of road traffic, assume the important responsibility of maintaining traffic order and ensuring the safety of pedestrians and vehicles. However, there are often some problems with the traditional setting mode of traffic lights. Especially on some non-main roads, pedestrian traffic lights often encounter the following situations: when the pedestrian traffic lights are still green when no one is there, this will lead to empty waiting for cars, a waste of resources and an increase in the traffic congestion risk. Similarly, when there is no car to pass, the pedestrian traffic lights are on red, making a large number of people gather to wait and unable to cross the road, which not only affects people's travel efficiency, but also may lead people to illegally cross the road because of impatience, leading to traffic accidents.
In real life, people can often observe such a phenomenon: when there are few or no pedestrians, pedestrian traffic lights are still on red, resulting in a large number of people gathered at the intersection, being unable to cross the road smoothly. This situation not only makes it extremely inconvenient for pedestrians to travel, but also may cause some safety risks due to the gathering of people. In addition, the long waiting time may also make people anxious and impatient, so they may take the illegal way to cross the road, which increases the risk of traffic accidents.
On the other hand, when no pedestrians cross the road, the traffic lights on the roadway may be on the red light for a long time, causing the car to wait empty. This not only wastes the driver's time, but also may lead to traffic jams and affect the normal operation of the entire traffic system. Long waits may also cause driver fatigue and impatience, thus increasing the likelihood of traffic accidents.
Due to the unreasonable setting of traffic lights, especially on some small branch roads that are not main roads, pedestrians and vehicles often choose to cross the road illegally because they wait too long. This violation not only violates the traffic rules, but also increases the risk of traffic accidents. Once a traffic accident occurs, it will not only cause casualties and property losses, but also have a serious impact on social order and public safety.
1.2. Significance
When there is no one, the pedestrian traffic lights cause the green light, and the car waits empty. When there is no car, the red light causes a large number of people to gather, which eventually leads to people and cars illegally crossing the road, which makes the road a traffic hazard.
The objective of this research is to achieve intelligent self sensing control of the walking and waiting times of people and vehicles on pedestrian traffic lights on non main roads, effectively replacing the commonly used pedestrian push-button traffic lights (Figure 1).

Figure 1: Push-button traffic lights [1]
The disadvantages of push-button traffic lights are: (1) Manual intervention is required; (2) Many pedestrians (especially the elderly and children) do not know how to operate the green light to cross the road without being informed; (3) The button is easily damaged and cannot be operated.
The advantages of this research topic include: (1) Automatic execution: automatically sense and execute pedestrian and vehicle situations through video image recognition, without the need for manual intervention. (2) Efficient passage: by reasonably arranging the time and order of traffic lights, it can effectively improve the traffic efficiency and reduce the waiting time for pedestrians and vehicles. This can not only improve people's travel efficiency, but also reduce the occurrence of traffic congestion and congestion phenomena, making the traffic system more smooth and efficient. (3) Improve traffic safety: optimizing the setting mode of traffic lights can also effectively improve the level of traffic safety. By reducing pedestrian and vehicle violations, the incidence of traffic accidents can be reduced and the safety of people's lives and property can be guaranteed. At the same time, reasonable traffic light settings can also enhance people's awareness of traffic safety and improve the traffic safety level of the whole society.
2. Research applications
In view of the above needs and significance, this study uses machine learning technology to build an intelligent crosswalk traffic light signal system to optimize the intelligent management of traffic lights, so as to improve traffic efficiency, reduce traffic congestion, reduce the incidence of traffic accidents, and provide people with a safer and more convenient travel environment. Machine learning and deep learning technology are applied to identify people through the time model, the abortion vehicle model and the decision control model.
Applying machine learning technology to construct a time model for identifying crowds, a traffic vehicle model, and a decision control model.
2.1. Identify pedestrians and vehicles and their direction of movement
Use high-definition cameras to capture road images in real time. Through computer vision technology, the system can identify the pedestrians and vehicles in the picture. For pedestrians, the system may focus on features such as shape, trajectory, and color; for vehicles, the system may identify information such as license plate, vehicle, and speed.
2.2. Building Time Model for Crowd Passing Through
By identifying the age of the population, construct time models for elderly, middle-aged, and young people to pass through sidewalks of different ages. Used to predict the duration of personnel passage and establish the duration of traffic lights.
For age recognition of the population, the CS-CNN of facial age recognition is adopted. Specifically, a cost sensitive loss function is proposed, which increases the activation and probability values of the expected age class based on the misclassification cost of embedding age recognition. Unlike previous machine learning methods that considered the cost of misclassification during the testing phase, it enables CNN to learn robust parameter values during the training phase, and theoretically proves that it can be used for the loss function of classification, which satisfies classification calibration and guessing distance. Finally, it was demonstrated through ablation experiments and comparative experiments that our method is highly competitive compared to the most advanced age recognition methods currently available. By setting different initial matrices c', it can also be used to solve different cost sensitive multi-classification or binary classification problems (such as making c'=1, which becomes a general cross entropy loss function when the misclassification costs are equal). This is also the first time that a deep neural network, considering the cost of misclassification, has been used for age recognition. Age, as an important biological feature of the face, has a significant impact in fields such as intelligent marketing and criminal investigation. Facial age recognition can be divided into traditional machine learning methods and deep learning methods according to the technology used [2].
2.3. Building a Time Model for Crowd Passing Through
The system processes and analyzes the data collected from videos and sensors, and uses algorithms to determine the position, speed, and direction of movement of pedestrians and vehicles. Based on these data, this study combines the number of passes with time and the daily routines of the crowd to discover patterns, and then use the pass rules to construct a decision control algorithm and a traffic light conversion strategy. Through the control system, we make signal decisions to ensure the safe passage of pedestrians and vehicles. The main factors that affect traffic light time include whether the main road is the main road, vehicle speed, and traffic flow. The data for these three factors can be obtained through existing sensors and are independent of each other. Therefore, this article establishes a Bayesian network-based traffic light autonomous intelligent decision-making model based on these three factors. The model has a star structure, that facilitates the transmission of various data and the implementation of the model. In this model, whether the main road is the main road, vehicle speed, and traffic flow are all observation variables, that is, variables that can be observed as evidence: the time category is a hidden variable, that represents the length of time for green lights. The model considers that the traffic light time at intersections should reflect the condition of the traffic road in real time, so the constructed model is as follows: May be concise and effective: as vehicle speed and traffic flow variables belong to integer variables, their values are within a range. This article adopts a fuzzy classification method to classify and analyze the observed values of observable variables [3].
3. Methodology
3.1. System architecture design
The intelligent traffic signal light system is mainly composed of data acquisition module, data processing module, decision optimization module and execution module. The system consists of two parts: software and hardware. The structure of the entire system is shown in the following diagram (Figure 2).
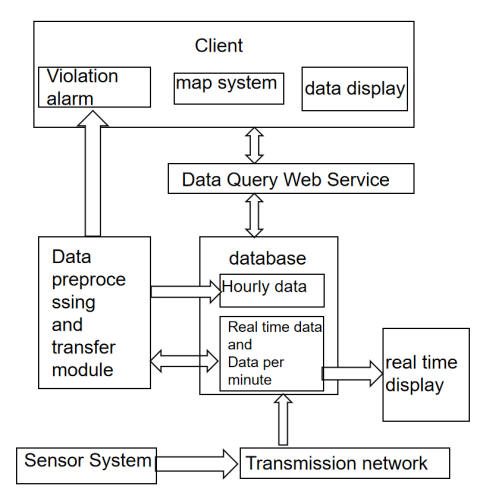
Figure 2: Logic structure diagram
The bottom layer of the system is the hardware part, which includes laser sensors and related control logic devices to collect traffic data and transmit it to the computer. Directly related to hardware is the data acquisition system, which stores the data collected by hardware in the database, thus achieving data exchange between the hardware layer and the software layer [4].
3.2. Data acquisition module
Collect real-time data on traffic flow, vehicle speed and pedestrian number through sensors, cameras and other devices installed at road intersections.
Data collection is the first and most crucial step in intelligent transportation systems. Intelligent transportation systems obtain various types of traffic data through various sensors and devices. There are various types of sensors, including car sensors, roadside sensors, cameras, etc. Vehicle mounted sensors can obtain information such as the vehicle's position, speed, and travel time; roadside sensors can obtain road condition information, such as traffic flow, visibility, etc; and cameras can obtain image and video data for license plate recognition and violation monitoring. These sensors and devices are distributed in different locations in the city, working together to achieve comprehensive monitoring of the transportation system.
3.3. Data processing module
Clean, integrate and feature extract the collected data to provide input for the subsequent machine learning model.
After data collection, it needs to be processed and cleaned to extract useful information. The processing of data involves multiple fields, such as big data processing, signal processing, and image processing. Firstly, there is big data processing. The huge amount of data in intelligent transportation systems requires the use of big data technology for analysis and mining. Traffic managers can discover problems and potential influencing factors in the transportation system through algorithms, such as data mining and machine learning, and formulate corresponding measures. Next is signal processing. The data in intelligent transportation systems exists in the form of temporal signals, which require signal processing to extract features and patterns. Traffic managers can use signal processing technology to analyze the fluctuations and periodic changes in the transportation system, and discover the patterns of traffic congestion and accidents.
The transportation data covers a wide area and has a large time span, so the amount of data is very large. Therefore, a well-designed database system is needed to store and process the data. Even so, the large amount of data can lead to a decrease in processing performance. Considering that people have different levels of concern for data at different time scales, it is necessary to differentiate the levels of data and carry out certain integration processing. Real time data is processed by converting the data collected by sensors into geographic information. The converted information still finely stores the speed and model data of each vehicle, and stores the logical number representing geographical location information, rather than the physical number of the sensor. The system can use this number to find its position on the map data. Real time data is generated at the fastest speed, resulting in a large amount of data. Each real-time data includes time, vehicle speed, vehicle model, and number. Except for the time data which occupies 8 bytes, all other information occupies 4 bytes. Therefore, its total data volume can be estimated by the following formula [4]:
\( S=nT η (4+4+8+4)=20 η nT \) (1)
Among them, n represents the number of sensors, T represents the collection time (s), and η represents the number of vehicles passing by per second. Vehicles cannot always be connected together and pass quickly, so they are generally less than 1. According to the maximum detection capability of the laser sensor implemented in practice, if two vehicles pass by every second, 500 sensors are set up in each district. They can continuously collect data for one day and generate a data volume of \( S=20x2x500x3600x24B ≈ 1.61G \) [4].
3.4. Decision optimization module
Based on the machine learning algorithm, learn and analyze the traffic data, and generate the scheduling strategy and optimization scheme of the traffic lights. The traffic scheduling model in this scheme is mainly composed of GA and LSTM. Each generation of individuals in the population is a set of waiting scheduling schemes for a certain period of time, and each individual's manifestation is a scheduling scheme. The pressure value of the road network reflects the condition of the road network after adopting this scheduling scheme. The larger the pressure value of the road network, the greater the degree of congestion after adopting this scheme. GA calculates the road network pressure of all individuals in the current population based on their genotypes, and uses this as a criterion to select scheduling plans and eliminate unsuitable individuals. LSTM is mainly used to predict the new traffic volume for the next unit of time, helping GA choose more effective scheduling solutions [5]. The process flow of the scheduling model method is shown in the Figure 3.
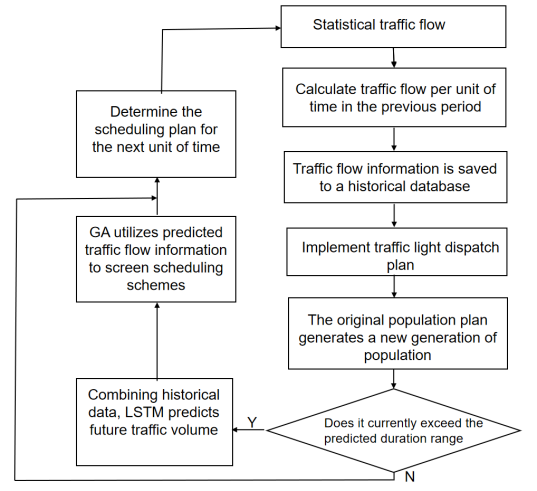
Figure 3: Method flowchart
Transform the scheduling strategy and optimization scheme of the decision optimization module into specific control instructions to control the working state of traffic lights.
4. Key technology research
4.1. Machine learning algorithms
Using support vector machines, decision trees, random forests, and other algorithms to classify, regress, and cluster traffic data, extracting key information such as traffic flow and vehicle speed.
4.1.1. Support Vector Machine
Support Vector Machine (SVM) algorithm is used in pedestrian portrait recognition, and kernel methods are applied to extend the linear learner to a nonlinear learner through kernalization (i.e. introducing kernel functions)[6].
4.1.2. Random Forest Algorithm
Random forest is simple, easy to implement, and has low computational overhead. Surprisingly, it exhibits powerful performance in many tasks . It can be seen that random forest only makes small changes to Bagging, but unlike the diversity of base learners in Bagging, which only comes from sample perturbations (by sampling the initial training set), the diversity of base learners in random forest not only comes from sample perturbations, but also from attribute perturbations. This allows the generalization performance of the final ensemble to be further improved by increasing the difference between individual learners [6].
4.2. Deep learning technology
Through deep learning models such as Convolutional Neural Network (CNN) and Recurrent Neural Network (RNN), traffic images and videos are recognized and analyzed, achieving functions such as vehicle type recognition and pedestrian detection.
4.2.1. Convolutional Neural Network (CNN)
In the application process of CNN, the mechanism of stacking multiple hidden layers and processing the output of the previous layer in each layer can be seen as processing the input signal layer by layer, thereby transforming the initial input representation that is not closely related to the output target into a representation that is more closely related to the output target, making it possible to complete tasks that were previously difficult to achieve based solely on the output projection of the last layer [6].
Applying the YOLO algorithm in object recognition, object recognition is defined as a regression problem for the probability of each target appearing in the segmentation box of the image, and using the same convolutional neural network to output the probability, center coordinates, and box size of each target for all segmentation boxes [7].
In behavioral cognitive research, image features extracted by convolutional neural networks are applied to action classification. In the behavioral cognitive problems of videos, convolutional neural networks can maintain their two-dimensional structure and learn by stacking features from continuous time segments [8], establish 3D convolutional neural networks that vary along the timeline [9], or extract features frame by frame and input them into recurrent neural networks [10], all of which can perform well in specific problems.
4.2.2. Recurrent Neural Network (RNN)
Recurrent neural networks have advantages in learning nonlinear features of sequences due to their memory, parameter sharing, and Turing completeness [11]. Recurrent neural networks have applications in natural language processing (NLP), such as speech recognition, language modeling, machine translation, and are also used for various time series forecasting tasks. The recurrent neural network constructed by introducing the CNN can handle computer vision problems containing sequence inputs.
4.3. Reinforcement learning technology
By using reinforcement learning algorithms, the system continuously learns and optimizes the scheduling strategy of traffic signals during the interaction with the environment, improving traffic efficiency.
Reinforcement learning (RL), also known as reinforcement learning, evaluation learning, or reinforcement learning, is one of the paradigms and methodologies of machine learning. It is used to describe and solve the problem of agents using learning strategies to maximize returns or achieve specific goals in their interaction with the environment [11].
The common model of reinforcement learning is the standard Markov Decision Process (MDP). According to given conditions, reinforcement learning can be divided into pattern based reinforcement learning (model-based RL) and model-free reinforcement learning (model-free RL) [12], as well as active reinforcement learning (active RL) and passive reinforcement learning (passive RL) [13]. The variants of reinforcement learning include reverse reinforcement learning, hierarchical reinforcement learning, and reinforcement learning of partially observable systems. The algorithms used to solve reinforcement learning problems can be divided into two categories: policy search algorithms and value function algorithms. Deep learning models can be used in reinforcement learning to form deep reinforcement learning [11].
The reinforcement learning theory is inspired by behaviorist psychology, focusing on online learning and attempting to maintain a balance between exploration and exploitation. Unlike supervised learning and unsupervised learning, reinforcement learning does not require any pre given data, but rather obtains learning information and updates model parameters by receiving rewards (feedback) from the environment for actions [12].
5. Conclusion
Through machine learning technology, the accurate identification of people, cars and movement directions is realized. Through the training and learning of large amounts of data, machine learning algorithms can identify the movement trajectory and direction of traffic participants, such as people and vehicles. It is used to monitor traffic conditions and provide basic data support for the intelligent transportation system. Deep learning technology is used to build the prediction model to further improve the intelligent level of traffic control. By constructing a deep neural network model, the automatic extraction and feature learning of complex data are realized. Deep learning technology is used to model and analyze traffic flow, vehicle speed and other data to predict future traffic conditions, help the traffic management departments formulate countermeasures in advance, and also provide real-time road condition information for drivers to improve driving efficiency.
Finally, the realization of intelligent control of sidewalk traffic lights can further reduce the risk of traffic accidents. Sidewalk traffic lights are an important part of urban traffic, and are of great significance to ensure pedestrian safety and maintain traffic order. With the continuous development and improvement of artificial intelligence technology, we have reason to believe that the future of urban transportation will be brighter.
References
[1]. Wei Min Talks About Things. (2020) Why is the push-button traffic light not promoted in China, this is the original reason. September 14. https://baijiahao.baidu.com/s?id=1677774612046534092&wfr=spider&for=pc,.
[2]. Dongming Xu. (2020) A face age recognition method based on cost sensitive convolutional neural networks [J]. Computer application research, (11):3516-3520.
[3]. Haiyang Chen. (2014) Autonomous intelligent decision-making of traffic lights based on dynamic Bayesian networks [J]. Journal of Xi'an Engineering University, (4):474-479.
[4]. Song Jiuqing, Huang Yalou, Kang Yewei, et al. (2006) Data Processing and Analysis in Intelligent Transportation Systems [J]. Computer Engineering and Applications, 42(8):5. DOI:10.3321/j.issn:1002-8331.2006.08.064.
[5]. Jinpeng Li. (2019) Intelligent Traffic Light Scheduling Method Based on GA and LSTM [J]. Internet of Things Technology, (12):50-54.
[6]. Zhihua Zhou. (2016) Machine Learning, Tsinghua University Press: Chapter 6 Support Vector Machines, Integrated Learning, pp.137-180, Chapter 5: Neural Networks. pp.114.
[7]. Redmon, J., Divvala, S., Girshick, R. and Farhadi, A. (2016). You only look once: Unified, real-time object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, pp. 779-788.
[8]. Karpathy, A., Toderici, G., Shetty, S., Leung, T., Sukthankar, R. and Fei-Fei, L. (2014). Large-scale video classification with convolutional neural networks. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, pp. 1725-1732.
[9]. Tran, D., Bourdev, L., Fergus, R., Torresani, L. and Paluri, M. (2015). Learning spatiotemporal features with 3d convolutional networks. In Proceedings of the IEEE international conference on computer vision, pp. 4489-4497.
[10]. Donahue, J., Anne Hendricks, L., Guadarrama, S., Rohrbach, M., Venugopalan, S., Saenko, K. and Darrell, T., (2015). Long-term recurrent convolutional networks for visual recognition and description. In Proceedings of the IEEE conference on computer vision and pattern recognition, pp. 2625-2634.
[11]. Xipeng Qiu. (2020) Neural Networks and Deep Learning, Chapter 6: Recurrent Neural Networks,Chapter 14, Deep Reinforcement Learning. Github Inc., June 14.
[12]. Fern, X. (2008) Reinforcement Learning. In CS 434: Machine Learning and Data Mining. School of Electrical Engineering and Computer Science, Oregon State University.
[13]. Panin, A. and Shvechikov, P. (2017) Practical Reinforcement Learning. Coursera and National Research University Higher School of Economics.
Cite this article
Pan,Z. (2024). Analysis of Sidewalk Traffic Lights Setting Modes Optimization. Communications in Humanities Research,45,32-39.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Art, Design and Social Sciences
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Wei Min Talks About Things. (2020) Why is the push-button traffic light not promoted in China, this is the original reason. September 14. https://baijiahao.baidu.com/s?id=1677774612046534092&wfr=spider&for=pc,.
[2]. Dongming Xu. (2020) A face age recognition method based on cost sensitive convolutional neural networks [J]. Computer application research, (11):3516-3520.
[3]. Haiyang Chen. (2014) Autonomous intelligent decision-making of traffic lights based on dynamic Bayesian networks [J]. Journal of Xi'an Engineering University, (4):474-479.
[4]. Song Jiuqing, Huang Yalou, Kang Yewei, et al. (2006) Data Processing and Analysis in Intelligent Transportation Systems [J]. Computer Engineering and Applications, 42(8):5. DOI:10.3321/j.issn:1002-8331.2006.08.064.
[5]. Jinpeng Li. (2019) Intelligent Traffic Light Scheduling Method Based on GA and LSTM [J]. Internet of Things Technology, (12):50-54.
[6]. Zhihua Zhou. (2016) Machine Learning, Tsinghua University Press: Chapter 6 Support Vector Machines, Integrated Learning, pp.137-180, Chapter 5: Neural Networks. pp.114.
[7]. Redmon, J., Divvala, S., Girshick, R. and Farhadi, A. (2016). You only look once: Unified, real-time object detection. In Proceedings of the IEEE conference on computer vision and pattern recognition, pp. 779-788.
[8]. Karpathy, A., Toderici, G., Shetty, S., Leung, T., Sukthankar, R. and Fei-Fei, L. (2014). Large-scale video classification with convolutional neural networks. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, pp. 1725-1732.
[9]. Tran, D., Bourdev, L., Fergus, R., Torresani, L. and Paluri, M. (2015). Learning spatiotemporal features with 3d convolutional networks. In Proceedings of the IEEE international conference on computer vision, pp. 4489-4497.
[10]. Donahue, J., Anne Hendricks, L., Guadarrama, S., Rohrbach, M., Venugopalan, S., Saenko, K. and Darrell, T., (2015). Long-term recurrent convolutional networks for visual recognition and description. In Proceedings of the IEEE conference on computer vision and pattern recognition, pp. 2625-2634.
[11]. Xipeng Qiu. (2020) Neural Networks and Deep Learning, Chapter 6: Recurrent Neural Networks,Chapter 14, Deep Reinforcement Learning. Github Inc., June 14.
[12]. Fern, X. (2008) Reinforcement Learning. In CS 434: Machine Learning and Data Mining. School of Electrical Engineering and Computer Science, Oregon State University.
[13]. Panin, A. and Shvechikov, P. (2017) Practical Reinforcement Learning. Coursera and National Research University Higher School of Economics.