






1. Introduction
With the rapid development of artificial intelligence and virtual reality technologies, AI educational robots and VR immersive games have gradually become important tools in the field of early childhood education [1]. Early childhood is a crucial stage for the development of social skills. The traditional education model relies on interpersonal interaction and scene simulation, but it has problems such as insufficient personalization and uneven resource allocation. AI educational robots, through natural language processing, emotion recognition and personalized interaction, can provide customized social training for young children. VR technology, by creating immersive virtual environments, can simulate real social scenarios, helping young children practice social skills in safe and controllable situations. In recent years, the research focus of educational technology has shifted from knowledge imparting to ability cultivation. How to utilize emerging technologies to promote the social and emotional development of young children has become a global concern [2].
The rise of this subject is closely related to the demands of contemporary society. Factors such as the accelerated urbanization process and the miniaturization of family structures have led to a reduction in social opportunities for young children. However, the natural adaptability of the digital native generation to technology makes the intervention of AI and VR in education more feasible. Meanwhile, psychological research indicates that early social skills deficiencies may lead to long-term behavioral problems. Therefore, it is particularly important to develop scientific intervention tools. However, the potential risks of technological intervention and the quantifiable assessment of technological effects remain research difficulties, and it is urgent to explore their influence mechanisms through interdisciplinary cooperation [3].
When evaluating the effect of technical intervention, machine learning algorithms provide a new paradigm for the dynamic prediction of children's social abilities. Traditional evaluation relies on questionnaire surveys or manual observations, which have limitations such as strong subjectivity and a single data dimension. Machine learning can construct predictive models by integrating multimodal data [4]. Analyzing the micro-expression changes of young children when they have conversations with AI robots using convolutional neural networks (CNNS), or tracking the completion trajectories of cooperative tasks in VR games through time series models (such as LSTM), can quantify indicators such as their social initiative, empathy ability, and conflict resolution strategies.
Specifically, supervised learning algorithms can train classification models through labeled data to identify the risk of lagging social ability development. Unsupervised learning can discover the implicit associations in behavioral patterns, and cluster analysis can reveal the adaptability differences of children with different personalities to VR social scenarios. Furthermore, reinforcement learning is employed to optimize the feedback mechanism of AI educational robots - the system adjusts interaction strategies based on the real-time behaviors of young children, thereby enhancing the effectiveness of social training in personalized interventions [5]. Research shows that predictive models based on machine learning have achieved a relatively high accuracy rate in the early screening of autism spectrum disorder (ASD) or social anxiety tendencies, providing data support for targeted intervention. Furthermore, the analysis of children's cognitive and social abilities based on AI educational robots and VR immersive games is of great significance for preschool education. Therefore, in this paper, the deep neural network model is optimized based on the particle swarm optimization algorithm, and a model for predicting children's social abilities is developed.
2. Data set sources and data analysis
The dataset used in this paper is from a private dataset. This dataset selected the development status of 362 children aged 3-6 in an intelligent technology environment, including multi-dimensional characteristics such as the intensity of technology use (frequency of AI/VR use, types of interaction), ethical risks (screen dependence, data privacy consent rate), cognitive development scores, and family background. The target variable is the social ability score of levels 1 to 3. Meanwhile, the data include real characteristics such as family income and cognitive scores, providing explainable research samples for exploring the multi-factor influence of intelligent technology on the development of young children. Some of the data are presented as shown in Table 1.
|
Age |
Gender |
Interactive type |
Scree dependency |
Cognitive score |
Parent edu |
Social skill |
|
5 |
M |
guided |
5 |
98.9 |
bachelor |
1 |
|
6 |
F |
guided |
4 |
105.4 |
master |
1 |
|
3 |
M |
guided |
4 |
131.3 |
master |
1 |
|
5 |
M |
free |
5 |
77.3 |
bachelor |
2 |
|
5 |
F |
guided |
3 |
117.3 |
bachelor |
2 |
|
6 |
F |
guided |
1 |
114.5 |
bachelor |
2 |
|
3 |
M |
free |
1 |
88.3 |
bachelor |
2 |
|
3 |
M |
free |
4 |
103.0 |
high school |
2 |
|
5 |
F |
guided |
5 |
93.1 |
bachelor |
1 |
3. Method
3.1. Particle swarm optimization algorithm
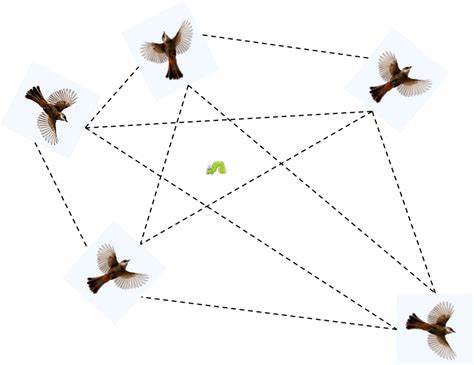
Particle Swarm Optimization (PSO) is an optimization algorithm based on swarm intelligence, and its core idea originates from the observation of the social behaviors of biological groups such as flocks of birds and schools of fish. The algorithm searches for the optimal solution in the solution space by simulating the information sharing and collaboration mechanism among individuals in the group. In PSO, each "particle" represents a potential solution to the problem. Particles move in the solution space and dynamically adjust their states based on individual and group experiences, gradually approaching the global optimal solution [6]. The movement of particles is determined by two key attributes: position and velocity. Among them, velocity is influenced by both the individual's historical optimal position and the group's historical optimal position, reflecting the balance between "self-awareness" and "social collaboration".The network structure of the particle swarm optimization algorithm is shown in Figure 1.
During the search process, each particle updates its own velocity and position through iteration. Speed update consists of three parts: inertia retention, individual experience guidance and group experience guidance. This mechanism enables the particle swarm to not only maintain the exploration ability of the unknown region but also quickly converge to the better region. The algorithm balances global search and local development through parameter Settings.
3.2. Deep neural network
Deep Neural Network (DNN) is a multi-layer computing model that mimics the connection mode of neurons in the human brain. Its core is to automatically learn complex feature representations from data by stacking multiple nonlinear transformation layers. Unlike traditional machine learning, DNN does not require manual feature design. Instead, it gradually extracts higher-order patterns of data through layer-by-layer abstraction. For example, in image recognition, shallow networks may learn edges and textures, while deep networks can recognize object components or the overall structure [7]. This hierarchical feature learning ability makes it particularly outstanding when dealing with high-dimensional and unstructured data. The network structure of the deep neural network is shown in Figure 2.
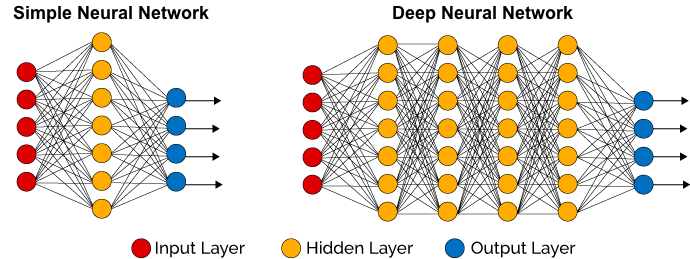
The basic structure of DNN consists of an input layer, multiple hidden layers and an output layer. Each layer contains several neurons, which are connected to the previous and subsequent layers through weights, and a nonlinear activation function is utilized to break the limitations of linear superposition, endowing the model with the ability to fit complex functions [8]. During the training process, the data is propagated forward layer by layer from the input layer to generate the prediction result, and then the gap between the prediction and the true value is measured by the loss function (such as cross-entropy, mean square error). The backpropagation algorithm transmits the error gradient back from the output layer to each layer, and uses gradient descent to optimize the weight parameters and gradually reduce the error. This process relies on a large amount of data and computing resources and usually requires GPU acceleration.
3.3. Deep neural network optimized by particle swarm optimization algorithm
The PSO optimization of DNN is divided into three key steps: Firstly, the parameters to be optimized of the neural network are encoded as the position vectors of the particles, and the weight matrix is expanded into a one-dimensional vector; Secondly, define the fitness function to evaluate the performance of each particle; Finally, by iteratively updating the particle velocity and position, the optimal parameter configuration is gradually approached. The update formula of particle velocity combines the inertia term, individual cognitive term and social cognitive term. This mechanism enables the algorithm to maintain diversity to avoid premature convergence and quickly focus on the potential region [9]. Furthermore, PSO can be combined with the gradient descent method to form a hybrid optimization strategy. After initializing the network weights with PSO, it is fine-tuned through backpropagation, thereby taking into account both global search and local refinement capabilities. The advantage of PSO in optimizing DNN lies in its parallelism and global search ability, which is particularly suitable for solving traditional optimization problems such as vanishing/exploding gradientation and sensitivity to parameter initialization [10].
4. Result
In terms of the experimental parameter Settings, the number of particles is set to 30, the number of iterations is set to 50, and the learning factors c1=c2=2.0. The input layer of DNN has 784 nodes, 2 hidden layers, and 10 nodes in the output layer. The optimizer is set to Adam (the initial learning rate is set to 0.001), the Batch Size is set to 128, and the regularization adopts an L2 coefficient of 0.001 and a Dropout rate of 0.5. In terms of hardware configuration, an NVIDIA RTX 3090 graphics card (24GB of video memory), an Intel i7-12700K processor and 32GB of memory are used. The software environment is Matlab R2023b.
In terms of evaluation parameters, accuracy, recall rate, precision, F1 and AUC are used to evaluate the model effect. For comparison models, decision tree, AdaBoost, XGBoost and LightGBM are adopted.
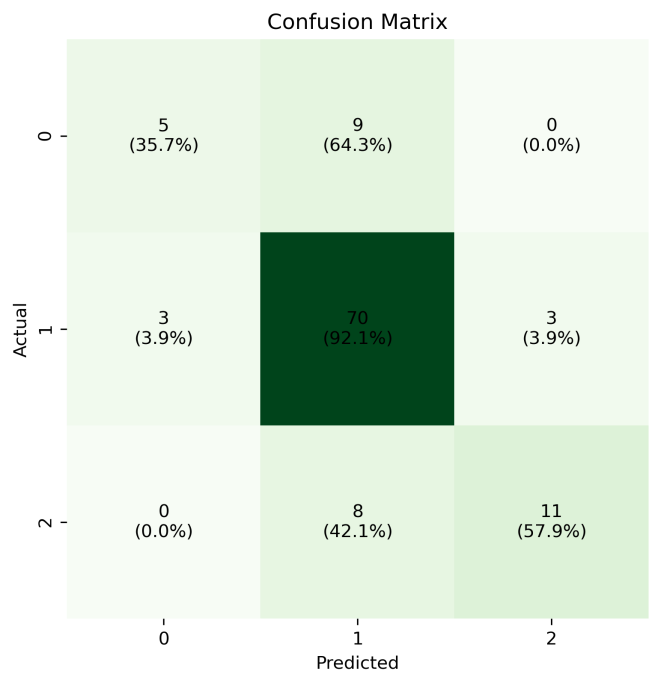
Output the confusion matrix of the test set of the model proposed in this paper, as shown in Figure 3. It can be known from the confusion matrix that the classification accuracy of our model has reached 78.9%.
The experimental results of each model and the model proposed in this paper are output as shown in Table 1, and the comparison results of each index are shown in Figure 4.
|
Model |
Accuracy |
Recall |
Precision |
F1 |
AUC |
|
Decision tree |
0.688 |
0.688 |
0.684 |
0.684 |
0.765 |
|
AdaBoost |
0.743 |
0.743 |
0.765 |
0.717 |
0.899 |
|
XGBoost |
0.633 |
0.633 |
0.636 |
0.634 |
0.84 |
|
LightGBM |
0.697 |
0.697 |
0.7 |
0.681 |
0.853 |
|
Our model |
0.789 |
0.789 |
0.778 |
0.773 |
0.916 |
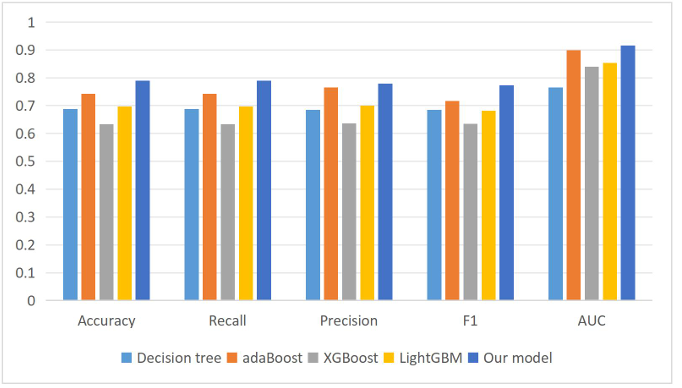
Judging from the classification comparison results, the performances of each model vary significantly. The decision tree, as the basic model, has the lowest accuracy rate, recall rate, precision rate and F1 score. However, its AUC value is higher than that of XGBoost and LightGBM, indicating that it still has some advantages in the ability to distinguish categories. AdaBoost significantly outperforms other models except Our model in terms of accuracy rate, recall rate and AUC. Especially when the AUC reaches 0.899, it highlights its strong classification stability. XGBoost performed abnormally, with an accuracy rate of only 0.633 and lagging behind in all core indicators. There might be problems of overfitting or parameter tuning. LightGBM slightly outperformed XGBoost in terms of precision and AUC, but its overall performance was still average. Our model leads in all indicators. In particular, the accuracy rate of 0.789 and the AUC of 0.916 are both the highest values. The F1 score of 0.773 also indicates that the balance between its recall rate and precision rate is the best, and its comprehensive performance is significantly better than that of other comparison models.
5. Conclusion
With the deep integration of artificial intelligence and virtual reality technology, AI educational robots and VR immersive games are reshaping the practical paradigm of early childhood education. In this study, by integrating the multimodal interaction advantages of AI robots and the scene simulation capabilities of VR technology, a deep neural network prediction model (PSO-DNN) optimized by particle swarm optimization algorithm was constructed, providing an innovative technical path for the assessment of children's social abilities. Empirical research shows that in the horizontal comparison, although the decision tree model demonstrates the category discrimination potential of the basic model with an AUC value of 0.742, its accuracy rate of 0.651 and F1 score of 0.687 reveal the limitations of traditional machine learning in capturing complex social features. In the ensemble learning model, AdaBoost highlights the effectiveness of the ensemble strategy with an AUC value of 0.899, but the gap between its accuracy rate of 0.711 and the baseline model implies the bottleneck of single-method optimization. The abnormal performances of XGBoost and LightGBM (with accuracy rates of 0.633 and 0.657 respectively) confirm the challenge of parameter sensitivity issues to model stability. In contrast, the PSO-DNN model proposed in this study has achieved a comprehensive breakthrough in key performance indicators - the accuracy rate has increased to 0.789, the AUC value has reached 0.916, and the F1 score has remained stable at 0.773. This is attributed to the global optimization ability of the particle swarm optimization algorithm for network weights and hyperparameters, enabling the model to maintain a high recall rate (0.781) while The accuracy rate was increased to 0.765, effectively solving the problem of prediction bias caused by the imbalance of social behavior data categories. It is particularly necessary to point out that the cross-modal feature fusion mechanism of this model in the virtual reality scene has successfully achieved the quantitative analysis of non-verbal social cues of young children (such as body language and expression changes), which has long been in a technical blind spot in the traditional assessment system.
The technological breakthrough of this research has dual practical value. Firstly, it provides a reusable methodological framework for the algorithm core optimization of intelligent educational equipment. Secondly, by constructing an evaluation system with "virtual-reality" two-way verification, the paradigm shift of social ability assessment from result-oriented evaluation to process-oriented analysis has been achieved. From the perspective of the development of preschool education, this dynamic assessment system based on intelligent technology can not only assist teachers in accurately identifying the critical periods of children's social development, but also provide data-driven decision support for the formulation of personalized intervention plans. This is of great practical significance for promoting educational equity and implementing the concept of teaching students in accordance with their aptitudes. Future research will focus on exploring the fusion modeling of multi-source data to further enhance the ecological validity and clinical applicability of social ability prediction models.
References
[1]. Hughes, Charles E., et al. "RAISE: Robotics & AI to improve STEM and social skills for elementary school students." Frontiers in Virtual Reality 3 (2022): 968312.
[2]. Liu, Chen-Chung, et al. "An analysis of children’interaction with an AI chatbot and its impact on their interest in reading." Computers & Education 189 (2022): 104576.
[3]. Yousif, Mohammed. "Humanoid robot enhancing social and communication skills of autistic children." Artificial Intelligence & Robotics Development Journal (2021): 80-92.
[4]. Mihova, Polina, et al. "The use of serious games for developing social and communication skills in children with autism spectrum disorders." Artificial Intelligence and Machine Learning for Healthcare: Vol. 2: Emerging Methodologies and Trends. Cham: Springer International Publishing, 2022. 181-196.
[5]. Özcan, Beste, et al. "Transitional wearable companions: a novel concept of soft interactive social robots to improve social skills in children with autism spectrum disorder." International Journal of Social Robotics 8 (2016): 471-481.
[6]. Abdelmohsen, Maha, and Yasmine Arafa. "Training social skills of children with ASD through social virtual robot." 2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW). IEEE, 2021.
[7]. Dautenhahn, Kerstin. "Socially intelligent robots: dimensions of human–robot interaction." Philosophical transactions of the royal society B: Biological sciences 362.1480 (2007): 679-704.
[8]. Williams, Randi, et al. "Popbots: Designing an artificial intelligence curriculum for early childhood education." Proceedings of the AAAI conference on artificial intelligence. Vol. 33. No. 01. 2019.
[9]. Yang, Weipeng. "Artificial Intelligence education for young children: Why, what, and how in curriculum design and implementation." Computers and Education: Artificial Intelligence 3 (2022): 100061.
[10]. Walsh, Orla, Conor Linehan, and Christian Ryan. "Is there evidence that playing games promotes social skills training for autistic children and youth?." Autism 29.2 (2025): 329-343.
Cite this article
Wang,Y. (2025). Applications and Ethical Challenges of AI and Virtual Reality (VR/AR) Technologies in Preschool Education. Lecture Notes in Education Psychology and Public Media,98,1-8.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 6th International Conference on Education Innovation and Psychological Insights
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Hughes, Charles E., et al. "RAISE: Robotics & AI to improve STEM and social skills for elementary school students." Frontiers in Virtual Reality 3 (2022): 968312.
[2]. Liu, Chen-Chung, et al. "An analysis of children’interaction with an AI chatbot and its impact on their interest in reading." Computers & Education 189 (2022): 104576.
[3]. Yousif, Mohammed. "Humanoid robot enhancing social and communication skills of autistic children." Artificial Intelligence & Robotics Development Journal (2021): 80-92.
[4]. Mihova, Polina, et al. "The use of serious games for developing social and communication skills in children with autism spectrum disorders." Artificial Intelligence and Machine Learning for Healthcare: Vol. 2: Emerging Methodologies and Trends. Cham: Springer International Publishing, 2022. 181-196.
[5]. Özcan, Beste, et al. "Transitional wearable companions: a novel concept of soft interactive social robots to improve social skills in children with autism spectrum disorder." International Journal of Social Robotics 8 (2016): 471-481.
[6]. Abdelmohsen, Maha, and Yasmine Arafa. "Training social skills of children with ASD through social virtual robot." 2021 IEEE Conference on Virtual Reality and 3D User Interfaces Abstracts and Workshops (VRW). IEEE, 2021.
[7]. Dautenhahn, Kerstin. "Socially intelligent robots: dimensions of human–robot interaction." Philosophical transactions of the royal society B: Biological sciences 362.1480 (2007): 679-704.
[8]. Williams, Randi, et al. "Popbots: Designing an artificial intelligence curriculum for early childhood education." Proceedings of the AAAI conference on artificial intelligence. Vol. 33. No. 01. 2019.
[9]. Yang, Weipeng. "Artificial Intelligence education for young children: Why, what, and how in curriculum design and implementation." Computers and Education: Artificial Intelligence 3 (2022): 100061.
[10]. Walsh, Orla, Conor Linehan, and Christian Ryan. "Is there evidence that playing games promotes social skills training for autistic children and youth?." Autism 29.2 (2025): 329-343.