







1. Introduction
The ornithopter, as advanced and fancy as it sounds, is the stuff of science fiction and movie effects in most people's minds. What most people don't know, however, is that Leonardo Da Vinci, the Renaissance master, drew up drawings for the world's first ornithopter. For most people, the ornithopter they know is from the famous American science fiction author Frank Herbert's novel Dune, and the film of the same name Dune. The main character's ornithopter is the focal point of the novel and film, which depicts the human colonization of the star and the scramble for spices thousands of years later. This sci-fi vehicle is certainly appealing. With the enthusiasm for flight and the many advances in aerodynamics, the study of ornithopters and the dynamics of ornithopters has reached an unprecedented level.
In this paper, the development history of ornithopter, the basic application of modern ornithopter and ornithopter dynamics, as well as the summary and prospect of modern ornithopter aerodynamics are described. Through the introduction of the flapper and the discussion of the flapper dynamics, this article can draw a more reasonable application field of the modern flapper and the prospect of human research on the flapper in the future. It may be helpful for the research of flapping dynamics and the design of flapping aircraft in the future.
2. Development and application of ornithopter
2.1. Da Vinci's work on the ornithopter
Flying has long been a dream for humans. History shows that man's unrelenting efforts to fly go back a long way. At the beginning of the 15th century, drawings of the world's first ornithopter designed according to technical specifications appeared. The scheme was designed by Da Vinci, the European Renaissance art and science giant. He had a passion for flying, and he was famous for his work on ornithopters. After doing a lot of detailed research on bird flight, Da Vinci began to design a flying machine like the wings of birds - ornithopter. He decided that a man's arms were not strong enough to flap the wings, so he had him lie on his stomach and use his thighs to drive the wings. Still not strong enough, he studied the use of mechanical power. The design of the ornithopter is quite ingenious. Its wings consist of a skeleton connected by several curved gold rods. Through a set of wheels and links, each skeleton produces a variety of curves, so as to achieve the purpose of imitating the flapping wing of a bird[1].
Although Da Vinci was not able to fly his own ornithopter successfully, even his design drawings were not discovered until many years after his death. The scheme was conceived by Da Vinci, who studied birds' wings, using his knowledge of physics and anatomy. His drawings and drafts are still in good condition in the exhibit room.
2.2. The study of ornithopter in history
The earliest recorded ornithopter capable of flying was a model of an ornithopter powered by rubber tendons designed by the Frenchman Penaud in 1874. Its characteristics are: the leading edge has a rigid rod, the surface of the flapping wing is composed of elastic film, the film is coated on the leading edge, only at the root of the wing there is a chord limit, and the shape of the flapping wing can change constantly in the flapping process. Flapping wings can withstand a lot of torque. This flapping wing structure can produce a lot of thrusts, but it is difficult to produce a lot of lift. This feature has greatly influenced the design ideas of the subsequent flapping wing aircraft, and the toy flapping wing aircraft made by many people in the later period is almost based on this form[2].
At the beginning of the 20th century, humanity finally solved the problem of power: Scientists are trying to put electric motors and internal combustion engines on airplanes, and the Wright brothers' plane took to the skies[3]. However, the research on ornithopter has been slow for various reasons. Russian scientists and designers have made major breakthroughs in this field. In 1913, M. Smurnov built an ornithopter with an electric motor drive. In the 1930s, many ornithopter enthusiasts joined in the exploration of this field[4]. There was good reason for this enthusiasm because at the time, existing aircraft were not ideal aircraft. If the ornithopter is successful, it will have some flying machines at that time that do not have the advantages: such as in situ or small field take-off; Excellent flight maneuverability and hovering performance and low flight cost. So far we've been able to make flapping wing vehicles that are close to practical. In principle, these aircraft can be divided into bird-like flapping wings and insect-like flapping wings, mainly small unmanned flapping wings, there is also large manned flapping wings test flight.
2.3. Modern ornithopter and its applications
The modern ornithopter is a biomimetic system that uses the ornithopter to generate lift. It is a new field of robotics. Large ornithopters have several real-world applications, including payload carrying and transportation[5].
Modern flapping wing aircraft are mostly applied to micro aerial vehicles, which are collectively called MAV (Micro Aerial Vehicle), especially those with a maximum size of no more than 15 cm and a range of 1-10km. This kind of ornithopter is widely used in this kind of micro aircraft and has the advantages of low cost, high mobility and easy to carry, often used in the field of reconnaissance[6].
Although modern flapping wings have been able to achieve better flight and control, there is still a certain gap from practical, still can not be widely used, and can only be used in some special requirements of the task, such as the city anti-terrorism narrow space detection. The main problems to be solved in modern flapping wings are low aerodynamic efficiency, high power and mechanism requirements, high material requirements and small payload. Taking the aerodynamic problem as an example, the micro-flapping wing belongs to a low Reynolds number and unsteady process. At present, the flow model and accurate aerodynamic changes during flapping are still not fully understood, and there is no perfect analytical method for calculating the aerodynamic force of the flapping wing.
3. The study of flapping wing aerodynamics
3.1. Observation of flapping wing insects and principle of data collection
One of the key points of flapping wing aerodynamic experiments is the aerodynamic measurement of the flapping wings. The existing contact mechanical measurement methods are difficult to directly and accurately measure the aerodynamic force of flapping wings in biological flight. At present, the aerodynamic force and moment of artificial flapping wing aircraft or flapping wing mechanisms are mainly measured by force balance. On the premise of the Reynolds number unchanged, the use of the large size artificial flapping wing mechanism simulation of real or simplified biological flapping wing movement, which can realize the flapping wing aerodynamic characteristics of insects and other small creatures, significantly reduces the performance requirements for the load device, but in the measurement of artificial flapping wing aerodynamic force, need special consideration to remove the influence of the inertia force of the flapping wing. Recently, Hightower et al. have successfully developed a non-contact flapping wing aerodynamic force test platform, whose main body is a rigid empty box with multiple force measuring points arranged on the upper and lower surfaces. When hummingbirds and other small flapping wing organisms hover in the empty box, the generated flapping wing aerodynamic force is transmitted to the upper and lower surfaces of the empty box in the form of pressure waves, which are recorded by the force measuring points. The vertical aerodynamic force of a small flapping wing organism in free flight can be obtained by processing. This non-contact force measurement method has little interference with biological flight and provides 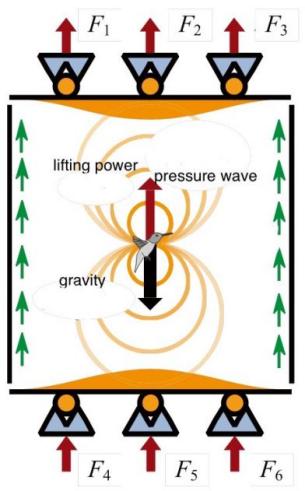 a new idea for direct measurement of the aerodynamic force of flapping wings[7].
a new idea for direct measurement of the aerodynamic force of flapping wings[7].
Figure 1. Working principle of the flapping wing aerodynamic force platform [8]
The aspect ratio is the main index to classify the shape of an airfoil, and it is also the key factor to measure the performance of the airfoil. The high-aspect ratio wings used in aircraft and helicopters are beneficial to reduce induced drag and provide a higher lift-drag ratio and flight energy efficiency. In contrast, insects, hummingbirds and other flying organisms have flexible slow flying and hovering abilities, and their wings with low aspect ratio are significant morphological characteristics. Previous studies have shown that the leading edge vortex gradually increases in size from the wing root to the wing tip, showing a conical structure. The clinging leading edge vortices are maintained during flapping to keep insects, hummingbirds and other organisms from stalling at high angles of attack.
Under different Reynolds numbers, hovering and forward flight conditions, the leading edge vortex has a similar variation with aspect ratio. When determining the optimal aspect ratio of the flapping wing, if the aspect ratio is too small, the upper wing surface is easily affected by the downwash flow of the wing tip vortex. If the length-diameter ratio is too large, the leading edge vortex will be broken or even fall off in a large area. For hummingbirds, numerical simulations of insects show that the average lift of flapping wings is maximum when the aspect ratio is 3-4.5, which is consistent with the actual flapping aspect ratio of hummingbirds and most insects. However, some wings of various flying creatures deviate from the above optimum aspect ratio. The wing-to-aspect ratio of butterfly wings is only about 1.5, and the wide wings result in a low beating frequency (about 20 Hz). For traditional fixed-wing aircraft, a high aspect ratio wing means a higher lift-drag ratio at the expense of maneuverability. The dragonfly's mobility lies mainly in its ability to control four slender wings individually, while the mosquito's mobility lies mainly in its flapping wing frequency, which is up to 800 Hz.
3.2. The aerodynamics of flapping wing flight
The flapping wings of animals inspired human flight. It is found that at high flapping frequency, the flexibility of the wing structure will affect the thrust and lift of the aircraft due to its deformation. At the corresponding flight speed, lift increases with flapping frequency. At the same flapping frequency, the flight speed can be increased by decreasing the Angle of attack, but the lift force will be lost. In simple flapping wing motion, the Angle of attack is necessary in order to obtain lift. Flapping wing motion generates thrust to gain flight speed. Flight speed and Angle of attack together produce the lift of flight[9].
Hovering flight is the mode with the highest energy consumption in flapping wing movement, and it is relatively easy to obtain the hovering motion rule by experimental observation means. Therefore, most studies on insect flight focus on hovering flight. Previous studies have analyzed the aerodynamic mechanism of insect hovering flight from various aspects such as live flight observation, model experiment and numerical simulation, and proposed the delayed stall mechanism additional mass effect, and the Wake capture mechanism
Delays stall mechanism refers to the flapping wing throwing himself on the robot with a large Angle of attack of the translation stage, the separation of the boundary layer near the leading edge and rolled up to form a strong leading edge vortex, due to the flapping wing specific movement patterns and low Reynolds number and aspect ratio, leading edge vortex can translation all or most of the trip to keep the attachment and stable low-pressure area on the surface, thus providing continuous lift contribution. The delayed stall mechanism is the main lift mechanism of flapping wing flight and the aerodynamic force generated by it accounts for most of the whole flapping cycle[10].
The additional mass effect refers to the rapid acceleration and deceleration process of the flapping wing during the sudden start and the change of flapping direction. This process will drive the air around the flapping wing to accelerate and decelerate rapidly, resulting in the increase of pressure acting on the flapping wing, and the projection to the lift direction will form a certain increase of lift force.
The wake capture mechanism means that after the flapping direction is reversed, the flapping wing will meet the wake generated by the previous flapping stroke, and part of the energy contained in the wake will be recaptured by the flapping wing, so as to improve the flapping efficiency of the whole cycle. Wake capture is considered to have a significant lift increase in the closing-opening process. However, in hovering flight and near ground flight, the interference between wake and the flapping wing is affected by many parameters, including flapping wing movement and shape, which may have both positive and adverse effects on the lift.
4. Conclusion
Man has never stopped studying ornithopters. This paper mainly introduces the history of human research on ornithopter, and introduces the aerodynamic of ornithopter. In the future, although the large ornithopter in the sand dune can be realized in scientific theory, the two major difficulties of material and power make it difficult to break through the research of ornithopter. Material constraints meant that the use of large manned ornithopters would not be possible even for decades. But the use of small ornithopters and the bionic design of animals such as dragonflies and hummingbirds could make the use of miniature ornithopters possible.
References
[1]. Jing Jing, Shijiazhuang Flight College Da Vinci -- Ornithopter, Journal of Scientific Inquiry for Adolescents. July. 15th 2020.
[2]. Yuan Changsheng, Song Bifeng, School of Aeronautics, Northwestern Polytechnical University. Development and research status of flapping wing aircraft,NEW OBSERVATION. Dec. 10th 2006.
[3]. Huang Pei, Trace back the origin of human aviation technology - the experimental stage of powered aircraft Oct. 30th 2020.
[4]. Akshayraj Nagaraj, Dayananda Sagar College of Engineering, Design and Development of an Ornithopter by Aerodynamic and Structural Analysis, July 2021.
[5]. Kushal Jadhav, Harshada Javheri, Nikita Durge, Akash Hange, Asst. Prof. Rohit R. Chavan. Design, Development and Analysis of Ornithopters, International Journal of Scientific & Engineering Research, July-2020.
[6]. Meng Xianfeng, China Helicopter Design and Research Institute Development status and trend of microAerial Vehicle, July 2015.
[7]. Xiang Jin Wu, Sun Yi, Shen Tong, LI Dao chun. School of Aeronautical Science and Engineering, Beihang University Research progress and application of flapping wing aerodynamics. Mar. 3rd 2018.
[8]. Aono H, Liang F, Liu H. Near- and far-field aerodynamics in insect hovering flight: an integrated computational study [J]. Journal of Experimental Biology, 2008.
[9]. Che-Shu Lin, Chyanbin Hwu, Wen-Bin Young, The thrust and lift of an ornithopter's membrane wings with simple flapping motion. Aerospace Science and Technology, Mar. 2006.
[10]. Shufan Zou, Ankang Gao, Yipeng Shi, Jiezhi Wu, Causal mechanism behind the stall delay by airfoil’s pitching-up motion, Theoretical and Applied Mechanics Letters, Nov. 2017.
Cite this article
Zhou,Z. (2023). The development and application of ornithopter and the study of ornithopter aerodynamics. Theoretical and Natural Science,5,549-553.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Computing Innovation and Applied Physics (CONF-CIAP 2023)
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Jing Jing, Shijiazhuang Flight College Da Vinci -- Ornithopter, Journal of Scientific Inquiry for Adolescents. July. 15th 2020.
[2]. Yuan Changsheng, Song Bifeng, School of Aeronautics, Northwestern Polytechnical University. Development and research status of flapping wing aircraft,NEW OBSERVATION. Dec. 10th 2006.
[3]. Huang Pei, Trace back the origin of human aviation technology - the experimental stage of powered aircraft Oct. 30th 2020.
[4]. Akshayraj Nagaraj, Dayananda Sagar College of Engineering, Design and Development of an Ornithopter by Aerodynamic and Structural Analysis, July 2021.
[5]. Kushal Jadhav, Harshada Javheri, Nikita Durge, Akash Hange, Asst. Prof. Rohit R. Chavan. Design, Development and Analysis of Ornithopters, International Journal of Scientific & Engineering Research, July-2020.
[6]. Meng Xianfeng, China Helicopter Design and Research Institute Development status and trend of microAerial Vehicle, July 2015.
[7]. Xiang Jin Wu, Sun Yi, Shen Tong, LI Dao chun. School of Aeronautical Science and Engineering, Beihang University Research progress and application of flapping wing aerodynamics. Mar. 3rd 2018.
[8]. Aono H, Liang F, Liu H. Near- and far-field aerodynamics in insect hovering flight: an integrated computational study [J]. Journal of Experimental Biology, 2008.
[9]. Che-Shu Lin, Chyanbin Hwu, Wen-Bin Young, The thrust and lift of an ornithopter's membrane wings with simple flapping motion. Aerospace Science and Technology, Mar. 2006.
[10]. Shufan Zou, Ankang Gao, Yipeng Shi, Jiezhi Wu, Causal mechanism behind the stall delay by airfoil’s pitching-up motion, Theoretical and Applied Mechanics Letters, Nov. 2017.