






1. Introduction
In today's world, wireless sensor networks permeate various sectors, from aiding agricultural production and issuing extreme disaster warnings to infrastructure condition monitoring and industrial applications. Yet, in remote locations or emergency situations, these systems often struggle to maintain connections with ground-based stations.
To address this challenge, wireless sensor networks have incorporated mobile drones. These drones enable ground sensor nodes to function as mobile data collectors, enhancing energy efficiency [1]. By integrating the high mobility of drones with wireless sensor networks, a new paradigm emerges. These unmanned aerial vehicles utilize a mix of sensing technologies, serving as mobile relays for data transmission and facilitating the deployment of mobile wireless sensor network nodes.
In the face of natural disasters – be it floods, earthquakes, or other extreme events – traditional ground communication facilities might be compromised. When these systems falter, mobile deployment nodes become crucial. Drones step in as aerial relay nodes, effectively restoring signal in areas with communication disruptions. With advantages like cost-effectiveness, flexibility, and ease of deployment, UAV-based stations are increasingly recognized as vital tools for emergency communications in exigent circumstances.
2. Research status
The drone assists the data transmission of the WSN
Store and forward mechanism
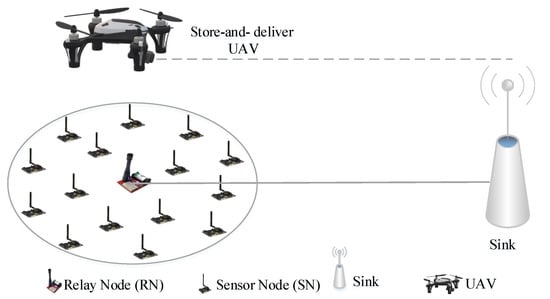
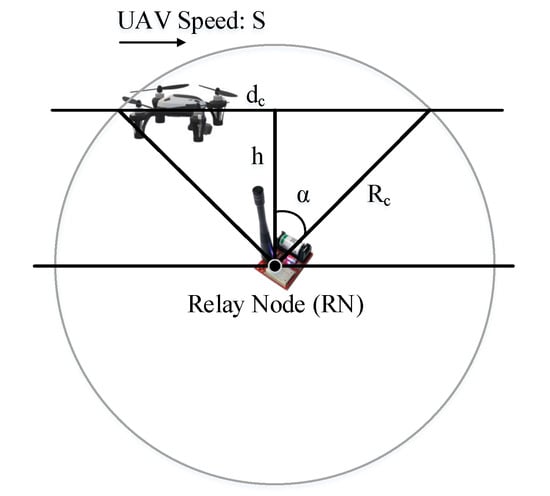
Figure 1. Schematic diagram [2].
In the figures 1, the drone follows the trajectory into the cluster communication range. The drone with the cluster head will start accepting and sending data. At the same time, the drone saves the recently received data in the buffer zone. When they fly to the place where the data is received, they will transfer the latest received data and then repeat this behavior [3]. The process of exchanging data is shown in the figure. When the drone is within range of the RN, devices within the RN range ensure that the drone completes the exchange of data before it goes out of range [4].
Real-time data transmission mechanism
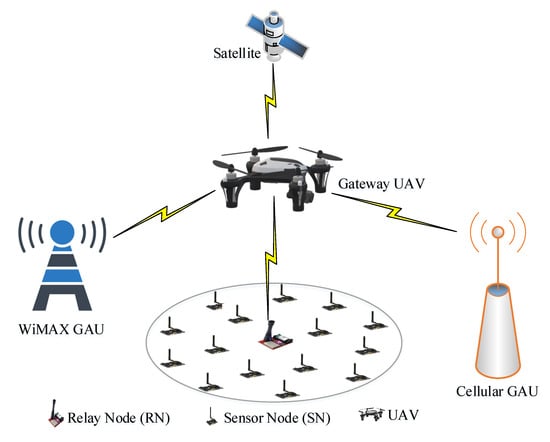
Figure 2. Structure diagram [5].
The figure 2 shows how the model works. When detection of non-routine events is required immediately, it sends a message indicating where the event occurred [6]. Synchronous data collection occurs when the drone is in this area. When they are within range of communication, they act as intermediaries to transmit data synchronously between the sensor node and the base station. This transfer model is suitable for providing real-time monitoring when conventional communication methods are unavailable under extreme conditions [7]. The real-time data transmission model of UAV wireless sensor networks under the occurrence of unconventional conditions such as extreme environments, natural factors, etc. is discussed. In the paper, the research of wireless nanosensor networks, the way drones collect data is studied [8]. Due to their size, nanosensors are not portable batteries. Therefore, in order to obtain energy to maintain its own work, each sensor needs to collect the electromagnetic waves radiated by the drone. By utilizing the collected energy, the sensor measures the sensing data to be sent to the drone-based gateway [9]. The energy required to send the sensing data of the drone's gateway comes from the energy previously collected by the sensor. Drones can be used in a variety of ways to collect real-time data
3. Key technologies and theories of UAV communication
3.1. High-efficiency resource allocation under the condition of limited UAV resources
Energy consumption is the most important problem restricting the development of UAV, UAV energy consumption mainly comes from two parts: UAV flight energy consumption and UAV communication energy consumption. The energy required by the drone is mainly provided by the on-board limited capacity battery, when the battery level falls below a certain threshold, the drone must immediately return to the ground to charge, thus causing a disruption in communication.
3.2. Environmental and climatic disturbances
When the drone is operating in an extreme environment, it is susceptible to sound wave interference generated by the extreme environment, which will cause the transmission of UAV communication signals to be interrupted or affected by it. Since drones are positioned by GPS, it may cause inaccurate GPS positioning and interference in extreme environments. Different geographical environments, such as mountains, lakes, forests and other complex geographical environments, will have an impact on the signal reception and propagation of the UAV, and may also interfere with the normal operation and communication of the UAV [10]. In addition to this, climatic factors such as high temperature, low temperature, humidity and other extreme weather conditions may also have an impact on the performance and safety of the drone.
4. Methodological studies of stability
4.1. Stability of the drone
When the UAV is unstable due to the GPS signal, it can greatly improve the positioning accuracy by receiving two or more GPS signals and performing differential processing through differential GPS technology. The drone can be equipped with two GPS receivers, using differential technology to improve positioning accuracy. In addition, other navigation systems such as inertial navigation and visual navigation can also be used to form a combined navigation system to improve the navigation performance of the UAV. Signals in different frequency bands are affected differently by climatic and environmental factors during propagation. Therefore, choosing the appropriate communication frequency band can improve signal quality and transmission stability. For example, if you want to achieve long-distance image transmission, you can choose to use SDI or high-definition video transmission lines to improve signal stability and clarity.
4.2. Wireless sensing interference
Drone deployment height: With the same number of sensors, a higher drone height results in higher transmission latency. If the height of the drone is too high, the UAV coverage area becomes larger, and the channel gain becomes weak, the transmission power of the UAV will increase to meet the requirements of the ground sensor node, which will cause serious interference to the ground link communication. If the UAV height is too low, the channel gain from the UAV to the source sensor node, target sensor node, and mission-critical sensor node will become high, which will also cause serious interference to the ground link, thereby reducing the communication quality of the ground link.
UAV transmission power: If the drone is far away from the receiving equipment or there are obstacles to obstruct, wireless relay technology can be used to relay the signal by setting up the relay device to increase the coverage and transmission stability of the signal. In the signal transmission process, low-noise techniques can be employed to reduce the noise level of the signal, thereby improving the signal-to-noise ratio and transmission quality of the signal.
5. Difficult challenges
5.1. Altitude measurement of drones in the field
When disasters strike in the field, there's often a noticeable discrepancy between the drone's flight altitude data previously recorded in a laboratory setting and the actual measurements taken on-site. Such inconsistencies necessitate re-evaluations and recalibrations in real-time field conditions. This can lead to significant time consumption, especially during critical moments when swift responses are essential. The ideal altitude data, in any given situation, are vital for optimizing drone performance and ensuring precise operations. The underlying causes of these deviations can range from atmospheric conditions to technical limitations or even calibration errors in laboratory setups.
5.2. The problem of limited energy of the UAV's sensor network
The energy constraints of Unmanned Aerial Vehicles significantly impact the performance of their integrated wireless sensor networks. As the UAV's power resources are depleted, the efficiency and reliability of its sensor networks can deteriorate, leading to potential operational challenges. Maintaining a consistent level of sensing performance is pivotal for the successful execution of missions, especially in critical tasks like surveillance, search, and rescue operations. Overcoming the challenges of degraded sensing performance caused by energy restrictions requires innovative solutions. These might encompass the development of energy-efficient sensor networks, integration of advanced energy storage technologies, or even incorporating energy-harvesting mechanisms that allow UAVs to recharge or prolong their operational time in the field. Addressing these concerns is crucial for ensuring that UAVs can deliver optimal performance, even in prolonged and demanding missions.
6. Conclusion
Modern drone data communication offers unparalleled convenience, but it is not without its challenges. Issues of fidelity and complexity remain pertinent, often impeding optimal performance. For simulation environments to mirror real-world scenarios accurately, it is crucial for researchers to delve deeper into the development of simulation methods that encompass interference. By integrating these interferences, simulations can be tailored to mimic specific environments more authentically. This nuanced approach not only addresses the current limitations but also paves the way for more refined solutions in drone communication systems. The upcoming phase of research promises to bridge these gaps, focusing on evolving the landscape of drone data communication and ensuring that simulated environments provide a more truthful reflection of the complexities found in real-world situations. This enhancement in realism will undoubtedly contribute to the broader advancement of drone technologies and their varied applications.
References
[1]. Ma, Y., Nie, Z., Hu, S., Li, Z., Malekian, R., & Sotelo, M. (2020). Fault detection filter and controller co-design for unmanned surface vehicles under DoS attacks. IEEE Transactions on Intelligent Transportation Systems, 22(3), 1422-1434.
[2]. Nguyen, M. T., Nguyen, C. V., Do, H. T., Hua, H. T., Tran, T. A., Nguyen, A. D., ... & Viola, F. (2021). Uav-assisted data collection in wireless sensor networks: A comprehensive survey. Electronics, 10(21), 2603.
[3]. Liu, J., Wang, X., Bai, B., & Dai, H. (2018). Age-Optimal Trajectory Planning for UAV-Assisted Data Collection. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS) (pp. 553–558). Honolulu, HI, USA.
[4]. Abdulla, A. E., Fadlullah, Z. M., Nishiyama, H., Kato, N., Ono, F., & Miura, R. (2014). An Optimal Data Collection Technique for Improved Utility in UAS-Aided Networks. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications (pp. 736–744). Toronto, ON, Canada.
[5]. Erdelj, M., Król, M., & Natalizio, E. (2017). Wireless sensor networks and multi-UAV systems for natural disaster management. Comput. Netw., 124, 72–86.
[6]. Pirmagomedov, R., Kirichek, R., Blinnikov, M., & Koucheryavy, A. (2019). UAV-based gateways for wireless nanosensor networks deployed over large areas. Comput. Commun., 146, 55–62..
[7]. Zhu, X., Zhao, Z., Wei, X., & others. (2021). Action recognition method based on wavelet transform and neural network in wireless network. In 2021 5th International Conference on Digital Signal Processing (pp. 60-65).
[8]. Alsamhi, S. H., Shvetsov, A. V., Kumar, S., Shvetsova, S. V., Alhartomi, M. A., Hawbani, A., ... & Nyangaresi, V. O. (2022). UAV computing-assisted search and rescue mission framework for disaster and harsh environment mitigation. Drones, 6(7), 154.
[9]. Di Stefano, G., Romeo, G., Mazzini, A., Iarocci, A., Hadi, S., & Pelphrey, S. (2018). The Lusi drone: A multidisciplinary tool to access extreme environments. Marine and Petroleum Geology, 90, 26-37.
[10]. Jiang, J., & Han, G. (2018). Routing protocols for unmanned aerial vehicles. IEEE Communications Magazine, 56(1), 58-63.
Cite this article
Liu,W. (2024). Analysis of UAV data communication stability method in extreme environment. Applied and Computational Engineering,53,131-135.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Ma, Y., Nie, Z., Hu, S., Li, Z., Malekian, R., & Sotelo, M. (2020). Fault detection filter and controller co-design for unmanned surface vehicles under DoS attacks. IEEE Transactions on Intelligent Transportation Systems, 22(3), 1422-1434.
[2]. Nguyen, M. T., Nguyen, C. V., Do, H. T., Hua, H. T., Tran, T. A., Nguyen, A. D., ... & Viola, F. (2021). Uav-assisted data collection in wireless sensor networks: A comprehensive survey. Electronics, 10(21), 2603.
[3]. Liu, J., Wang, X., Bai, B., & Dai, H. (2018). Age-Optimal Trajectory Planning for UAV-Assisted Data Collection. In Proceedings of the IEEE INFOCOM 2018-IEEE Conference on Computer Communications Workshops (INFOCOM WKSHPS) (pp. 553–558). Honolulu, HI, USA.
[4]. Abdulla, A. E., Fadlullah, Z. M., Nishiyama, H., Kato, N., Ono, F., & Miura, R. (2014). An Optimal Data Collection Technique for Improved Utility in UAS-Aided Networks. In Proceedings of the IEEE INFOCOM 2014-IEEE Conference on Computer Communications (pp. 736–744). Toronto, ON, Canada.
[5]. Erdelj, M., Król, M., & Natalizio, E. (2017). Wireless sensor networks and multi-UAV systems for natural disaster management. Comput. Netw., 124, 72–86.
[6]. Pirmagomedov, R., Kirichek, R., Blinnikov, M., & Koucheryavy, A. (2019). UAV-based gateways for wireless nanosensor networks deployed over large areas. Comput. Commun., 146, 55–62..
[7]. Zhu, X., Zhao, Z., Wei, X., & others. (2021). Action recognition method based on wavelet transform and neural network in wireless network. In 2021 5th International Conference on Digital Signal Processing (pp. 60-65).
[8]. Alsamhi, S. H., Shvetsov, A. V., Kumar, S., Shvetsova, S. V., Alhartomi, M. A., Hawbani, A., ... & Nyangaresi, V. O. (2022). UAV computing-assisted search and rescue mission framework for disaster and harsh environment mitigation. Drones, 6(7), 154.
[9]. Di Stefano, G., Romeo, G., Mazzini, A., Iarocci, A., Hadi, S., & Pelphrey, S. (2018). The Lusi drone: A multidisciplinary tool to access extreme environments. Marine and Petroleum Geology, 90, 26-37.
[10]. Jiang, J., & Han, G. (2018). Routing protocols for unmanned aerial vehicles. IEEE Communications Magazine, 56(1), 58-63.