






1. Introduction
Nowadays, with the booming development of science and technology, artificial intelligence technology is being increasingly widely deployed in the medical field. In the process of delivering drugs to patients, there is excessive reliance on medical staff, which frequently leads to a substantial waste of human resources. Although many hospitals have adopted an intelligent drug dispensing system, which automatically sending drugs to the drug extraction window, saving a part of human resources, issues such as untimely drug delivery and even cross-infection of medical staff still prevails. [1] Therefore, this paper will specifically study the following three questions: the nature of intelligent drug delivery carts, their current application status, and the future research direction. Through the research of this paper, it is anticipated to provide evidence for the widespread popularization and promotion of intelligent drug delivery carts and point out the direction for their enhanced development in the future.
2. Introduction to Intelligent Drug Delivery Cart
2.1. Application Scenario
In the construction of hospital scenarios, the emphasis is placed on highlighting the characteristics of the hospital environment. The factors such as irregular shapes of pharmacies and wards and the existence of non-path obstacles are weakened, qwhile the geometric relationship between paths, wards, and pharmacies is highlighted. Figure 1 presents the construction result.
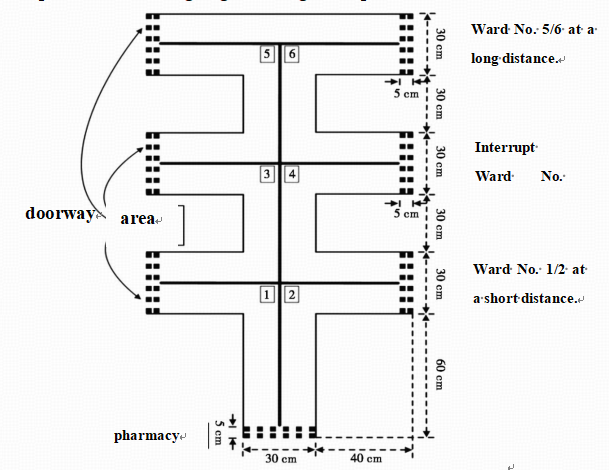
Figure 1. Map construction [2]
Drug distribution primarily involves the round-trip process between the pharmacy and the ward. There are three distance types for wards: near, medium, and far, with the ward numbers of all three types being randomly assigned. There are guide lines between the pharmacy and the wards, and ward numbers are marked at intersections. Black blocky graphics are located at the entrances of wards and the pharmacy.
2.2. Design Idea
An intelligent drug delivery cart is designed, which mainly comprises an STM32 main control chip, an automatic path following module, a digital and graphic recognition module, a drug detection module, a motor drive module, and a display module, among others. The overall idea is as follows: The cart recognizes the pharmacy address to which drugs will be delivered through the digital recognition module and transmits the signal to the STM32 main control. After determining the near, medium and far ends, the cart is ready to start. The drug detection module detects whether drugs are loaded. Once loaded, the cart controls the motor to drive and rotate the wheels to start. According to the path following module, the path is recognized. Based on the digital recognition module, the ward direction is recognized. Based onAt this time, the cart reaches the designated pharmacy and halts to await unloading. When the drug detection module detects that the drugs have been unloaded, the cart controls the digital and graphic recognition module to horizontally flip 180° through the steering gear, exchanges the front and rear of the cart, restarts and returns to the pharmacy along the site trajectory. The overall system structure is shown in Figure 2.
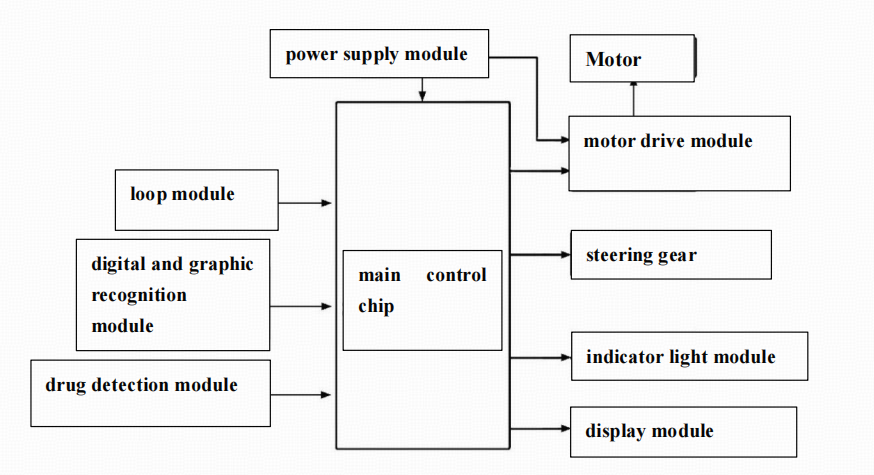
Figure 2. System structure diagram [2]
2.3. Selection of Main Modules
The hardware components of the intelligent drug delivery trolley exhibit diversity. Here, only the hardware with higher frequency of use is presented.
2.3.1. Control Module. STM32F103ZET6 is a single-chip microcomputer that supports 32-bit data processing. It adopts the ARM Cortex-M3 core, and the main frequency can reach 72MHz. It not only possesses high-performance processing capabilities but also exhibits low power consumption and is cost-effective in application. Consequently, it constitutes a more suitable choice for the main control unit.
2.3.2. Gray-scale Tracking Module.The gray-scale tracking module adopts a four-channel gray-scale sensor module. [3] The module encompasses four independent gray-scale sensors which are mainly used for tracking. According to the photoelectric effect principle [4] that black lines can absorb more light, while white or bright backgrounds will reflect more light, the black lines are used as the predetermined driving route of the intelligent drug delivery trolley. The gray-scale sensor can recognize the black lines on the ground. By detecting the lines on the ground, the trolley can determine its own traveling direction and position, thus ensuring that the trolley will not deviate from the predetermined route.
2.3.3. Drug Detection Module. The drug detection module uses an infrared sensor. The infrared sensor detects the presence of drugs by utilizing the reflection or absorption characteristics of objects to infrared light. When a drug passes in front of or blocks the infrared sensor, it will interrupt or change the infrared light pattern reflected back to the sensor. Upon detecting this change, the infrared sensor converts the signal into an electrical signal and then notifies the main control module STM32F103ZET6 that there is a drug at this time. In accordance with the pre-programmed procedure, STM32F103ZET6 can control the trolley to perform corresponding actions, such as delivering drugs.
2.3.4. Digital and Graphic Detection Module. The image recognition module selects the OpenMV module, [5] which is usually installed at the front or top of the trolley. It is an open-source, low-cost, and powerful machine vision module. This module can use an external terminal to trigger or execute algorithms, and the results of the algorithms can be used to control I/O pins. This module uses STM32F103ZET6 as the image processing core of the intelligent drug delivery trolley to process image data captured by the camera. It can run image recognition algorithms to recognize numbers on the trolley's driving path and information such as the area in front of the room door.
3. Application Status of Intelligent Drug Delivery Trolley
Intelligent drug delivery carts are currently being widely deployed in hospitals, scientific research laboratories, nursing homes and other fields. Nowadays, many large hospitals have introduced intelligent drug delivery carts to replace some manual drug delivery work. For example, some hospitals lay tracks inside and let the drug delivery carts run along the tracks to accurately transport drugs from the pharmacy to various wards. This method not only improves the efficiency and accuracy of drug delivery but also reduces the workload of medical staff, enabling them to focus more on patient care. The intelligent rail logistics system adopted by the new campus of the First People's Hospital of Pingdingshan City has achieved the direct conveyance of specimens from wards to the laboratory without manual inspection, and drug transportation is also more efficient. In some special areas such as isolation wards and infectious disease wards, intelligent drug delivery carts play an important role. Since these areas have strict restrictions on the entry and exit of personnel to reduce the risk of infection, drug delivery carts can complete drug distribution without human operation, reducing the possibility of personnel infection. At the same time, the trolley can automatically read maps, plan paths, and accurately deliver drugs to designated locations to ensure that patients can receive treatment in time.
In some scientific research laboratories or pharmaceutical laboratories, the need for drug distribution and sample transfer frequently arises. The intelligent drug delivery trolley can automatically transport drugs and samples between different laboratories according to preset procedures, avoiding errors and contamination that may occur during manual transportation. At the same time, using the trolley also improves the work efficiency of the laboratory and speeds up the experimental process.
Certainly, in other environments, intelligent drug delivery carts also have a great role. Most of the elderly living in nursing homes are those with limited mobility and have a high demand for drug delivery. The intelligent drug delivery trolley can deliver drugs to the elderly's rooms regularly according to their medication needs, improving the timeliness and accuracy of medication. Moreover, by connecting with the management system of the nursing home, the trolley can provide real-time staff feedback on drug delivery, facilitating management and supervision.
Among the relevant studies, in the article "Design and Research of an Intelligent Drug Delivery Trolley", [6] Zhao Xiaoyu researched and designed a multifunctional automatic drug delivery trolley. This trolley integrates the functions of various existing machines for helping the elderly and disabled take medicine in today's society, compensates for the deficiencies of diverse machines, and exhibits the characteristics of simple structure, convenient operation, and low design cost. It is primarily composed of two components: an automatic reminder and water receiving device and a drug delivery system, and it can successfully complete the task of assisting patients to take medicine.
In the article "Design of an Intelligent Car Obstacle Avoidance Control System Based on Multiple Sensors", [7] Chen Wei designed a multi-sensor intelligent car obstacle avoidance control system based on cameras and ultrasonic waves given the inaccuracy of most current intelligent cars using a single ultrasonic sensor for detection and obstacle avoidance. Experimental results show that this system can achieve rapid obstacle avoidance during the autonomous driving process of intelligent cars. Concurrently, the accuracy of the multi-sensor intelligent car obstacle avoidance system is significantly improved compared to the single-sensor obstacle avoidance system. This provides the possibility for more extensive applications of intelligent drug delivery carts.
4. Future research development directions
In the future, intelligent drug delivery carts should be improved in the dimensions of intelligence and autonomy. In addition, the ability of intelligent drug delivery carts to work in complex and diverse environments should also be improved. Future drug delivery carts will have more intelligent path planning capabilities and will dynamically adjust the driving route in real-time according to environmental changes in hospitals or other usage scenarios (such as people walking, temporary obstacles appearing, etc.). in the dimensions of, within complex indoor environments, such as multi-story buildings of large hospitals and between different departments, drug delivery carts need to have accurate navigation capabilities and the function of quickly and accurately reaching designated wards, departments, or laboratory locations. Further improve the autonomous decision-making ability of the trolley so that it can independently arrange drug delivery tasks according to factors such as the urgency of drugs, delivery sequence, and distance to the destination. Simultaneously, the trolley also needs to have task management functions, being able to monitor its own task progress in real time, and automatically receive and execute the subsequent task upon the completion of one task, thereby realizing the autonomous operation of the entire process. To adapt to different usage scenarios, drug delivery carts need to have a miniaturized and flexible design. For example, in some narrow corridors, wards, and other spaces, the trolley needs to be able to turn and shuttle flexibly, so a more compact body structure and a flexible drive system need to be designed; thus, a more compact chassis structure and a flexible drive system need to be engineered. For example, by using sensors and communication equipment with enhanced anti-interference capabilities, the stability and reliability of the trolley can be improved. Simultaneously, the trolley also needs to have good waterproof, dustproof, the trolley also needs to exhibit excellent waterproof, dustproof, and shockproof properties and be capable of operating under austere environmental conditions.
5. Conclusion
This paper studies intelligent drug delivery carts. It elaborates on their design, incorporating key modules such as the STM32 chip. Intelligent drug delivery carts are currently being widely utilized in fields such as hospitals, scientific research laboratories, and nursing homes. In hospitals, large institutions introduce them to improve drug delivery efficiency and accuracy and reduce the workload of medical staff. They play an important role in special areas like isolation wards. In scientific research or pharmaceutical laboratories, they can automatically transport drugs and samples to improve work efficiency. In nursing homes, they can deliver drugs according to the medication needs of the elderly and provide feedback. The multifunctional automatic drug delivery cart designed by Zhao Xiaoyu and the multi-sensor intelligent car obstacle avoidance control system designed by Chen Wei provide the possibility for more extensive applications of intelligent drug delivery carts. In the future, intelligent drug delivery carts should be improved in terms of intelligence, autonomy, and the ability to adapt to complex environments, including more intelligent path planning, accurate navigation, autonomous decision-making, task management, miniaturized and flexible design, and stronger environmental adaptability. This paper merely focuses on some applications of intelligent drug delivery trolleys in drug delivery. It is anticipated that greater attention will be directed towards other application fields in the future, with the aim of attaining more precise research findings.
References
[1]. Huang Huihua, He Ting, Takahashi Kohei & Chen Chuangbin. (2023). Design and Implementation of an Intelligent Drug Delivery Trolley. Sensor World (01), 34 - 44. doi:10.16204/j.sw.issn.1006 - 883X.2023.01.006
[2]. Ye Tian, Lin Xingliang & Yang Luxia. (2023). Design of an intelligent drug delivery trolley based on a vision system. Shanxi Electronic Technology (01), 66 - 69.
[3]. Hou Lihong, Wei Yanfei, Li Jingjing & Li Jiahao. (2024). Design of a multifunctional intelligent drug delivery trolley based on image recognition. Software (07), 20 - 22.
[4]. Wang Tao. (2018). Discussion on the Principle and Application of Photoelectric Sensors. Computer Products and Circulation (07), 64 + 122.
[5]. Fu Shutian, Zha Xuehong & Xu Chao. (2022). An intelligent drug delivery trolley based on the OpenMV vision system. Industrial Control Computer (07), 6 - 9.
[6]. Zhao Xiaoyu, Li Yu, Zhu Xinyu & Li Lingling. (2020). Design and Research of an Intelligent Drug Delivery Trolley. Technology Wind (19), 13. doi:10.19392/j.cnki.1671 - 7341.202019012
[7]. Chen Wei & Chen Jing. (2018). Design of an Intelligent Car Obstacle Avoidance Control System Based on Multiple Sensors. Industrial Control Computer (07), 41 - 42.
Cite this article
Zhang,H. (2024). Research on the Application of Intelligent Drug Delivery Cart. Applied and Computational Engineering,114,123-127.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Huang Huihua, He Ting, Takahashi Kohei & Chen Chuangbin. (2023). Design and Implementation of an Intelligent Drug Delivery Trolley. Sensor World (01), 34 - 44. doi:10.16204/j.sw.issn.1006 - 883X.2023.01.006
[2]. Ye Tian, Lin Xingliang & Yang Luxia. (2023). Design of an intelligent drug delivery trolley based on a vision system. Shanxi Electronic Technology (01), 66 - 69.
[3]. Hou Lihong, Wei Yanfei, Li Jingjing & Li Jiahao. (2024). Design of a multifunctional intelligent drug delivery trolley based on image recognition. Software (07), 20 - 22.
[4]. Wang Tao. (2018). Discussion on the Principle and Application of Photoelectric Sensors. Computer Products and Circulation (07), 64 + 122.
[5]. Fu Shutian, Zha Xuehong & Xu Chao. (2022). An intelligent drug delivery trolley based on the OpenMV vision system. Industrial Control Computer (07), 6 - 9.
[6]. Zhao Xiaoyu, Li Yu, Zhu Xinyu & Li Lingling. (2020). Design and Research of an Intelligent Drug Delivery Trolley. Technology Wind (19), 13. doi:10.19392/j.cnki.1671 - 7341.202019012
[7]. Chen Wei & Chen Jing. (2018). Design of an Intelligent Car Obstacle Avoidance Control System Based on Multiple Sensors. Industrial Control Computer (07), 41 - 42.