






1. Introduction
The advancement of productivity and production technology has resulted in the widespread utilization of manipulators to handle an increasing number of tasks, improve efficiency and reduce costs. The traditional construction of manipulators, comprising rigid materials, enables them to perform rapid, precise, and repetitive tasks with great efficacy. However, they are less adept at handling irregularly shaped or fragile objects. As manufacturing demands grow more complex, conventional techniques are becoming insufficient. The advent of soft robotics, driven by innovations in soft materials, bionics, and simulation tools, has led to the emergence of soft manipulators.
The fundamental component of a soft manipulator is the soft actuator. In the 1950s, McKibben, a physicist, developed the pneumatic artificial muscle (PAM) for use in rehabilitation devices [1]. Subsequently, developments have resulted in the creation of fiber-reinforced and pneumatic network soft actuators.
This article presents an overview of soft actuators, encompassing both their structural form and their applications. It also offers insights into the current status of this technology. This article provides a summary of the current status of this technology in terms of both the structural form of soft actuators and the applications of soft actuators. It also offers insights based on these findings, paving the way for further research and development in related areas.
2. Structural Form
2.1. Fiber-reinforced Soft Actuator
Fiber-reinforced actuators are a class of flexible actuators that have been developed in recent years by several research groups around the world. Their basic design consists of an elastic capsule wrapped in an inextensible reinforcing material. The inner capsule acts like an ordinary balloon and expands in all directions when inflated. Wrapping the capsule in non-stretch fibers restricts its radial expansion so that it can only expand axially when inflated. Adding a layer of non-stretchable material prevents the actuator from expanding in the region of the layer; as one side expands axially and the other does not, the actuator bends when inflated. Feng Naishi et al. from Northeastern University proposed a new soft hand design [2], featuring a new model structure. This soft hand is composed of a mixture of the soft materials Ecofle00-50 and Dragon Skin30, and it consists of three chambers arranged side by side. Figure 1 illustrates the single finger and its sectional view, with chambers A, B, and C representing the three sections that can be inflated independently via air tubes. Three independent air tubes are uniformly distributed in the expanding layer A, embedded within this layer. One end of each air tube extends from the upper surface of A, while the other end emerges from the side, enabling independent inflation of the three chambers. The non-expanding layer is located on the upper surface of the expanding layer B. The bending principle of the single finger of the soft hand design is to use the strain difference between the layers to generate a bending motion. Specifically, the varying stiffness of each material layer results in different strain magnitudes under identical forces. In the structural design, a non-expanding layer is added in the middle of the lower two layers to limit the axial deformation motion of the finger, and the unidirectional bending of the finger is finally achieved, as shown in Figure 1. The torsional movement of the finger is due to the asymmetric binding of the outer fibre reinforcement layer, i.e. the Kevlar wire, which results in an asymmetric force on both sides and ultimately produces the torsional movement. The single finger module in this design is made up of three different materials, a colloidal layer, a glass fibre layer and a fibre reinforced layer.
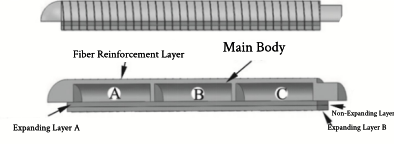
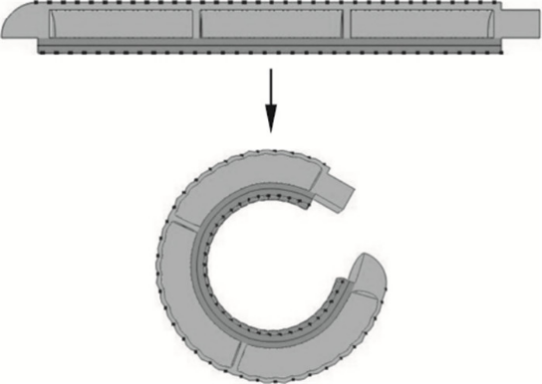
Figure 1. A schematic representation of the process of soft finger bending.
2.2. Pneumatic Networks
PneuNets (pneumatic networks) are a class of soft actuators originally developed by the Whitesides Research Group at Harvard University. These actuators consist of a network of channels and chambers embedded within an elastomer that expand when pressurized, thereby generating motion. The nature of this motion can be controlled by altering the geometry of the embedded chambers and the material properties of the chamber walls. When a PneuNets actuator is pressurized, expansion occurs in the region exhibiting the least stiffness. PneuNets pneumatic networks can be classified into two categories: slow pneumatic networks (SPN) and fast pneumatic networks (FPN) [3]. The SPN typically comprises a stretchable upper layer and a non-stretchable yet flexible lower layer (Figure 2). The stretchable layer of the SPN contains chambers connected by a single channel, and when pressurized, the top of the chamber preferentially expands and the inner wall preferentially stretches. This change in shape causes the entire actuator to bend, driven by the contrast in compliance between the stretchable and non-stretchable layers. The maximum change in volume of the channels within the pneumatic network due to the deformation of the elastic material determines the total amount of compressed air that must be delivered to achieve full deflection; a larger change in volume requires a longer pressurization time for complete actuation.
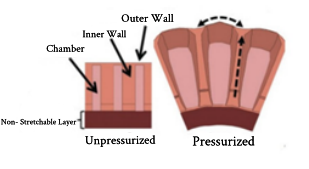
Figure 2. Schematic diagram of a slow pneumatic network structure.
Ilevski et al proposed a design for a pneumatic soft actuator based on a slow pneumatic network [4]. Their design uses embedded pneumatic networks (PneuNets) to form channels in an elastomer that inflate and actuate like a balloon [5]. The design consists of a series of parallel cavities embedded in the elastomer as repeating modules. Using intuition and empirical experimentation, the research team stacks or connects these repeating parts to design and test prototype structures that provide complex motion. In this design, only one pressure source is required for complex motions, with the distribution, configuration, and size of the air network determining the specific motion. As shown in Fig. 3, the left column shows a 9 cm tip-to-tip PneuNet gripping an uncooked egg. A rope suspends the actuator and helps to lift the egg; to the left of the gripper is a tube that extends into the center of the gripper to provide compressed air for the actuator.
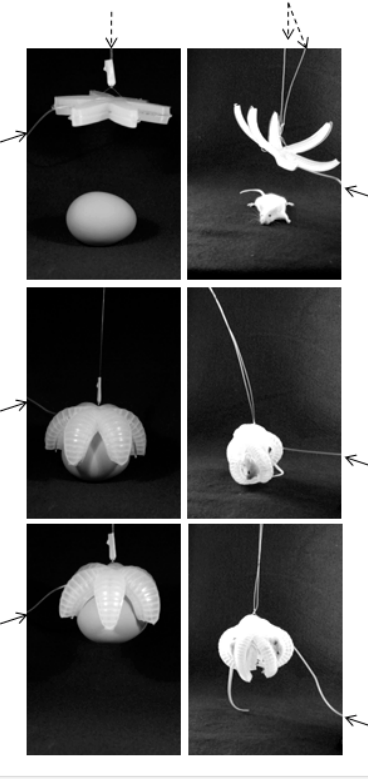
Figure 3. PneuNet grabs the uncooked egg
Fast Pneumatic Networks (FPN) have been proposed to reduce the volume change required for full actuation and thus increase actuation speed [3]. Like SPN, FPN consists of a stretchable upper layer and a non-stretchable but elastic lower layer. In contrast to SPN, the stretchable layer of FPN exhibits the presence of gaps between the inner walls of each chamber. The chamber dimensions have been redesigned such that the two inner walls are thinner and have a larger surface area than the other outer walls, as illustrated in Fig. 4. As a result, increasing the internal pressure causes preferential expansion of the inner walls while minimizing strain on the outer walls. In addition, the proximity of two adjacent chambers causes the expanding inner walls to squeeze each other, resulting in preferential elongation of the extensible layer, which has very little change in height (<1%).
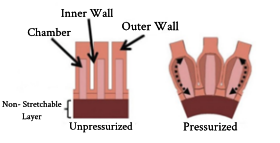
Figure 4. Schematic diagram of fast pneumatic network structure
Ningyang Wang and colleagues from the University of Science and Technology of China (USTC) proposed a new soft actuator based on a honeycomb pneumatic network (HPN) [6]. The HPN combines a compressed honeycomb structure with a pneumatic network, as shown in Fig. 5. The HPN structure comprises a hexagonal chamber with two rows of cells within a single plane. Each cell contains two airbags, with the expansion of the airbags on one side resulting in an increase in length on that side. Conversely, the structure exhibits a smaller amount of deformation on the opposing side due to its elasticity, enabling the soft actuator to bend. As the length of a single honeycomb pneumatic cell is subject to continuous change in response to alterations in air pressure, the honeycomb pneumatic grid, comprising multiple honeycomb pneumatic cells, exhibits an infinite range of deformation angles and positions. This results in an infinite degree of freedom, which is evident during stretching, bending and deformation. The HPN is a composite structure that combines the advantages of a compressed honeycomb structure and a pneumatic network, providing excellent flexibility and load-bearing capacity.
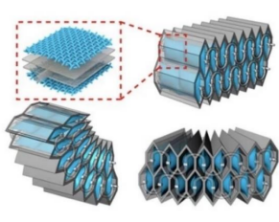
Figure 5. Schematic diagram of Honeycomb Pneumatic Network structure
3. Practical Application
3.1. Medical Field
Hand rehabilitation assistive devices are designed to aid patients with disabilities, such as those recovering from stroke, in restoring hand function and assisting with daily activities. Since these devices make considerable contact with the human body during use, they must adhere to stringent standards of safety, flexibility, and passive adaptability. The soft prosthesis is primarily composed of soft materials that can effectively fulfill the aforementioned requirements. In addition to their soft composition, these devices feature a simple structure and lightweight design, which greatly improves comfort and ease of use for the patient. As shown in Fig. 6 [7], a soft hand prosthesis can significantly enhance the quality of life for individuals with disabilities, facilitating daily activities such as grasping.

Figure 6. Soft hand to assist grasping in disabled patients
3.2. Object Gripping
The use of soft actuators not only extends the application of traditional rigid manipulators from handling simple, structured objects to manipulating flexible, complex curved surfaces and fragile items, but also offers greater flexibility due to the inherent properties of soft materials. The advent of soft hands has the potential to significantly expand the scope of robot applications, thereby enhancing convenience in both production and daily life. To date, research into soft actuators has yielded certain results, and a number of soft grippers have been launched onto the market. The soft gripper depicted in Fig. 7a [8] is suitable for grasping fragile objects or objects with irregular surfaces. Fig. 7b [9] is a soft gripper that imitates the shape of a human hand, which is highly dexterous. Finally, Fig. 7c [10] can be used to manipulate objects in a confined space. Furthermore, an investigation into soft actuators will facilitate a deeper comprehension of soft materials and establish a foundation for the broader utilization of soft materials.

Figure 7a. Soft gripper for grasping fragile objects or objects with irregular surfaces
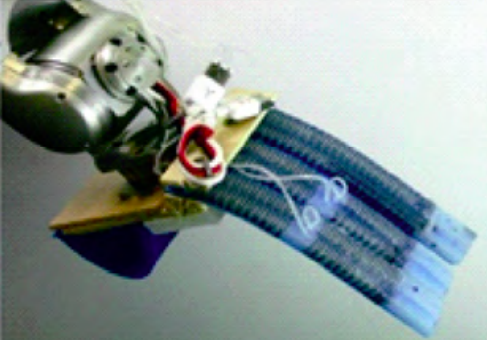
Figure 7b. Soft gripper with human-like shape
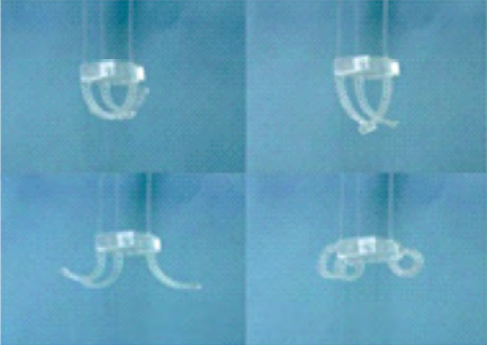
Figure 7c. Soft gripper for manipulating objects in confined spaces
4. Conclusion
Pneumatic soft actuators present several advantages over their rigid counterparts, including sustainability, lightweight construction, simplicity in design, and high output power. These attributes make them well-suited to addressing the limitations of current rigid actuators, which include a complex structure, high cost and low interaction safety. The broad potential for application across various fields has drawn significant interest from scholars and organizations worldwide, with several related products already entering the market. The structural design of the soft actuator is of paramount importance in determining the actuator's motion characteristics. Similarly, a comprehensive understanding of the operational principles and characteristics of the various actuator types is essential for the successful design and manufacture of a soft robot. The advancement of new designs and technologies has led to the rapid development of soft pneumatic robotics, resulting in numerous achievements. A notable trend toward multifunctionality and biomimetic design has also emerged, positioning soft pneumatic actuators as a critical component in improving human-robot interaction.
In conclusion, research on soft pneumatic actuators has made notable advancements globally. It is foreseeable that future research will expand the scope of potential applications, enhancing the value and significance of these actuators.
References
[1]. Gaylord, R. H. (1958). U.S. Patent No. 2,844,126. Washington, DC: U.S. Patent and Trademark Office.
[2]. Feng Naishi, Wang Hong, Hu Fu, & Li Kang. (2019). Design and analysis of fiber-reinforced three-cavity structure of soft robotic arm. Journal of Northeastern University: Natural Science Edition, 40(10), 6.
[3]. Mosadegh, B., Polygerinos, P., Keplinger, C., Wennstedt, S., Shepherd, R. F., Gupta, U., ... & Whitesides, G. M. (2014). Pneumatic networks for soft robotics that actuate rapidly. Advanced functional materials, 24(15), 2163-2170.
[4]. Ilievski, F., Mazzeo, A. D., Shepherd, R. F., Chen, X., & Whitesides, G. M. (2011). Soft robotics for chemists. Angewandte Chemie International Editiion.
[5]. Needleman, A. (1977). Inflation of spherical rubber balloons. International Journal of Solids and Structures, 13(5), 409-421.
[6]. Wang Ningyang, Sun Hao, & Jiang Hao. (2016). Research on a soft gripper grasping strategy based on honeycomb pneumatic network. Robotics, 38(3), 8.
[7]. Polygerinos, P., Lyne, S., Wang, Z., Nicolini, L. F., Mosadegh, B., Whitesides, G. M., & Walsh, C. J. (2013, November). Towards a soft pneumatic glove for hand rehabilitation. In 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems(pp. 1512-1517). IEEE.
[8]. Homberg, B. S., Katzschmann, R. K., Dogar, M. R., & Rus, D. (2015, September). Haptic identification of objects using a modular soft robotic gripper. In 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS)(pp. 1698-1705). IEEE.
[9]. Deimel, R., & Brock, O. (2013, May). A compliant hand based on a novel pneumatic actuator. In 2013 IEEE international conference on robotics and automation(pp. 2047-2053). IEEE.
[10]. Wakimoto, S., Ogura, K., Suzumori, K., & Nishioka, Y. (2009, May). Miniature soft hand with curling rubber pneumatic actuators. In 2009 IEEE International Conference on Robotics and Automation (pp. 556-561). IEEE.
Cite this article
Zhen,Z. (2024). Structure and Application of Soft Pneumatic Actuators. Applied and Computational Engineering,114,191-196.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Gaylord, R. H. (1958). U.S. Patent No. 2,844,126. Washington, DC: U.S. Patent and Trademark Office.
[2]. Feng Naishi, Wang Hong, Hu Fu, & Li Kang. (2019). Design and analysis of fiber-reinforced three-cavity structure of soft robotic arm. Journal of Northeastern University: Natural Science Edition, 40(10), 6.
[3]. Mosadegh, B., Polygerinos, P., Keplinger, C., Wennstedt, S., Shepherd, R. F., Gupta, U., ... & Whitesides, G. M. (2014). Pneumatic networks for soft robotics that actuate rapidly. Advanced functional materials, 24(15), 2163-2170.
[4]. Ilievski, F., Mazzeo, A. D., Shepherd, R. F., Chen, X., & Whitesides, G. M. (2011). Soft robotics for chemists. Angewandte Chemie International Editiion.
[5]. Needleman, A. (1977). Inflation of spherical rubber balloons. International Journal of Solids and Structures, 13(5), 409-421.
[6]. Wang Ningyang, Sun Hao, & Jiang Hao. (2016). Research on a soft gripper grasping strategy based on honeycomb pneumatic network. Robotics, 38(3), 8.
[7]. Polygerinos, P., Lyne, S., Wang, Z., Nicolini, L. F., Mosadegh, B., Whitesides, G. M., & Walsh, C. J. (2013, November). Towards a soft pneumatic glove for hand rehabilitation. In 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems(pp. 1512-1517). IEEE.
[8]. Homberg, B. S., Katzschmann, R. K., Dogar, M. R., & Rus, D. (2015, September). Haptic identification of objects using a modular soft robotic gripper. In 2015 IEEE/RSJ international conference on intelligent robots and systems (IROS)(pp. 1698-1705). IEEE.
[9]. Deimel, R., & Brock, O. (2013, May). A compliant hand based on a novel pneumatic actuator. In 2013 IEEE international conference on robotics and automation(pp. 2047-2053). IEEE.
[10]. Wakimoto, S., Ogura, K., Suzumori, K., & Nishioka, Y. (2009, May). Miniature soft hand with curling rubber pneumatic actuators. In 2009 IEEE International Conference on Robotics and Automation (pp. 556-561). IEEE.