






1. Introduction
1.1. AI in Autonomous Driving
In recent years, integrating Artificial Intelligence (AI) into autonomous driving systems has emerged as a transformative force in the automotive industry. This fusion aims to revolutionize transportation perception and interaction, promising a future where vehicles not only possess self-driving capabilities but also make informed decisions that optimize safety, efficiency, and passenger comfort. Advanced sensors and AI algorithms enable vehicles to interpret and respond to complex traffic environments, a concept once confined to science fiction that is now rapidly becoming reality due to substantial investments and research efforts.
Tesla exemplifies this advancement through its pioneering use of AI in developing autonomous vehicles. Figure 1 illustrates how Tesla is leveraging Artificial Intelligence to create the autonomous cars of the future. By integrating AI into their vehicles, Tesla is not only pushing technological boundaries but also reshaping the landscape of transportation innovation.

Figure 1. How Tesla Is Using Artificial Intelligence to Create The Autonomous Cars Of The Future
1.2. Motivations and Critical Assessment
The shift towards autonomous driving technology is driven by a multitude of factors, including the reduction of traffic accidents caused by human error, improvement of traffic flow, and decrease in environmental impact through optimized driving patterns. AI plays a central role in this technological revolution due to its ability to learn from extensive datasets and make real-time decisions. Figure 2 illustrates the remote sensing system on an autonomous car, highlighting the integration of AI technologies into vehicle perception and decision-making processes.
However, as society moves towards widespread adoption, it is crucial to critically evaluate the efficiency of AI in autonomous driving. This review aims to explore the current state of AI applications in autonomous driving, highlighting advancements made, challenges encountered, and future prospects for the symbiotic relationship between AI and autonomous vehicles. Through a comprehensive analysis of existing literature and studies, insights into how AI is shaping the future of transportation will be provided while identifying areas that require further research and development to overcome current limitations and fully unleash the potential of autonomous driving.
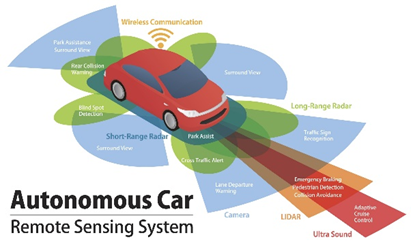
Figure 2. Remote sensing system on an autonomous car
2. Related Work
In examining the efficiency of AI in autonomous driving, it is essential to consider the breadth of research and development that has contributed to the current state of the field. Numerous studies have been conducted to evaluate the performance, safety, and scalability of AI-driven autonomous vehicles. Below are key findings from relevant literature:
2.1. Enhancing Autonomous Vehicle Decision-Making with Adaptive Learning Algorithms
Zhang et al. investigated the utilization of adaptive learning algorithms to enhance the decision-making capabilities of autonomous vehicles. Their study, published in the Journal of Artificial Intelligence in Transportation, demonstrated how artificial intelligence systems can continuously adapt their behavior based on real-time feedback from the environment [1]. By incorporating adaptive learning mechanisms, the researchers observed a significant enhancement in the efficiency of autonomous driving systems, particularly when dealing with complex traffic scenarios.
2.2. Optimizing Autonomous Vehicle Perception through Sensor Fusion Techniques
Li and Wang investigated the role of sensor fusion techniques in optimizing the perception capabilities of autonomous vehicles. Published in the IEEE Transactions on Intelligent Transportation Systems, their research highlighted the importance of integrating data from multiple sensors, such as cameras, LiDAR, and radar, to enhance object detection and tracking accuracy [1]. The findings underscored the impact of sensor fusion on improving the overall efficiency and reliability of AI-driven autonomous driving systems.
2.3. AI-Driven Strategies for Energy-Efficient Autonomous Driving: Transforming Sustainability in Transportation
Chen and Liu conducted a comprehensive analysis of energy-efficient driving strategies facilitated by AI technologies. Their research, presented at the International Conference on Autonomous Vehicles, highlighted the potential benefits of AI-driven optimization algorithms in minimizing energy consumption and reducing carbon emissions [2]. The study focused on developing intelligent driving policies that leverage real-time traffic conditions and vehicle dynamics to enhance the environmental sustainability of autonomous driving systems.
The researchers emphasized novel approaches aimed at integrating AI into autonomous vehicles to achieve these goals. By optimizing driving behaviors and adapting to dynamic road conditions, AI systems can effectively reduce fuel consumption and greenhouse gas emissions. This proactive strategy not only improves the efficiency of individual vehicles but also contributes to broader environmental goals by mitigating the impact of transportation on climate change.
Chen and Liu's findings underscore the transformative potential of AI in revolutionizing the environmental footprint of autonomous driving technologies. Their work paves the way for further advancements in energy-efficient transportation systems, advocating for the continued integration of AI-driven strategies to achieve sustainable mobility solutions.
2.4. Deep Learning in Autonomous Driving
Deep learning [3], a subset of machine learning, has emerged as a cornerstone technology in autonomous driving. The application of convolutional neural networks (CNNs) has been particularly transformative, enabling vehicles to interpret complex visual inputs for road recognition and obstacle detection. Deep reinforcement learning extends these capabilities by providing a framework for making strategic decisions and learning from the consequences of actions taken. Together, these deep learning techniques form the backbone of the cognitive functions in autonomous vehicles, allowing them to navigate and interact with their environment safely and efficiently.
2.5. Convolutional Neural Networks (CNNs)
Convolutional Neural Networks (CNNs) are a type of deep neural network that is especially powerful in processing structured array data such as images. In the context of autonomous driving, CNNs are utilized to detect patterns and features within visual data [4]. For road recognition, CNNs can identify lane markings, traffic signs, and lights by learning from a multitude of images captured by the vehicle's onboard cameras. This capability is critical for maintaining the vehicle within its lane and complying with traffic laws.
For obstacle detection, CNNs are trained to recognize a variety of objects such as pedestrians, bicycles, other vehicles, and even animals. By analyzing pixel patterns, CNNs can differentiate between static and dynamic objects, allowing autonomous vehicles to adjust their trajectory accordingly. The robustness of CNNs in varying lighting and weather conditions is continuously improved through extensive training on diverse datasets, making them reliable under different driving scenarios.
2.6. Deep Reinforcement Learning (DRL)
Deep Reinforcement Learning (DRL) [5] combines the representation learning of deep neural networks with the decision-making framework of reinforcement learning. DRL enables vehicles to learn optimal behaviors through trial and error, using feedback from the environment to reinforce successful strategies. For example, a vehicle might learn to change lanes efficiently by receiving positive reinforcement when it performs the maneuver safely and quickly, and negative reinforcement when the action leads to near-misses or excessive time taken.
2.7. Challenges and Future Directions
While deep learning has significantly advanced autonomous driving, it is not without challenges. One of the main issues is the requirement for large amounts of labeled data to train the neural networks effectively. Collecting and annotating this data can be time-consuming and costly. Additionally, deep learning models can be opaque, making it difficult to understand the reasoning behind certain decisions, which is a concern for safety-critical applications like driving.
Future research in deep learning for autonomous driving is likely to focus on improving the efficiency and interpretability of models. Techniques such as transfer learning, where knowledge from one domain is applied to another, can reduce the need for extensive data. Furthermore, the development of explainable AI (XAI) could make deep learning models more transparent, allowing for greater trust and easier debugging [6].
In conclusion, deep learning, through CNNs and DRL, has become the technological bedrock upon which the future of autonomous driving is being built [7]. As research progresses, these neural network-based methods will continue to evolve, further enhancing the safety, efficiency, and reliability of autonomous vehicles. Deep learning has revolutionized the field of autonomous driving by providing sophisticated algorithms that allow vehicles to process and interpret vast amounts of sensory data. The most significant contribution of deep learning to autonomous driving is its ability to perform complex tasks such as image recognition, natural language processing, and predictive modeling with a level of accuracy that was previously unattainable.
These studies represent only a fraction of the diverse research efforts aimed at advancing the integration of AI in autonomous driving. By synthesizing insights from such investigations, a deeper understanding of the current landscape can be gained, guiding future innovations in this rapidly evolving field. It is evident from this research that deep learning plays a crucial role in autonomous driving as convolutional neural networks enable vehicles to perceive and understand their environment, including road recognition and obstacle detection. Additionally, deep reinforcement learning provides an effective approach to decision-making, allowing vehicles to make accurate maneuvers based on their surroundings and objectives.
3. Research Methods
In order to build upon the findings discussed in the literature review, the research methods section will focus on a two-pronged approach: case analysis and comparative analysis. These methodologies are chosen to provide a comprehensive understanding of the impact of AI technologies on autonomous driving systems.
3.1. Case Analysis
Case analysis is instrumental in dissecting the intricacies of AI implementation in autonomous driving. Through a series of in-depth examinations of specific instances where AI has been deployed, researchers can gain valuable insights into the real-world performance, reliability, and safety of these systems. Case studies can reveal the challenges faced by autonomous vehicles in various scenarios, from urban traffic to highway driving, and the effectiveness of AI in overcoming these challenges. By documenting and analyzing these cases, researchers can identify areas for optimization, refine algorithms, and develop robust strategies to enhance the efficiency of AI in autonomous driving. Furthermore, case analysis serves as a platform for validating AI models and ensuring their readiness for widespread adoption.
3.2. Comparative Analysis
Comparative analysis will be employed to assess the advancements in autonomous driving systems attributable to specific AI technologies. By comparing the performance of vehicles with and without adaptive learning algorithms, sensor fusion techniques, and energy-efficient driving strategies, researchers can quantify the enhancements in vehicle operation. This method will enable a clear evaluation of the benefits, such as improved safety and reduced environmental impact, as well as any potential drawbacks. For instance, the comparative analysis may reveal increased computational demands or higher costs associated with the implementation of advanced AI features. Understanding these trade-offs is essential for making informed decisions about the future development and deployment of autonomous driving technologies.
By utilizing these research methods, the study will extend the insights from the literature review, offering a nuanced examination of the roles that adaptive learning algorithms, sensor fusion techniques, and energy-efficient driving strategies play in the efficiency of autonomous driving systems. This multifaceted approach will not only corroborate existing research but also uncover new avenues for exploration and innovation in the field of autonomous vehicles.
4. Review and Analysis
4.1. Current Challenges and Limitations
Despite the advancements, several challenges hinder the full realization of AI efficiency in autonomous driving. These include:
• Data Overload: The sheer volume of data generated by sensors can overwhelm existing algorithms, leading to delays in decision-making.
• Integration Complexity: Efficiently integrating data from diverse sensors and sources remains a significant challenge, often leading to inaccuracies.
• Energy Constraints: As AI systems become more complex, their energy consumption increases, posing a challenge for electric and hybrid vehicles.
4.2. Case Analysis: Tesla Autopilot System
Tesla's Autopilot system exemplifies AI efficiency in autonomous driving. The system utilizes a combination of cameras, ultrasonic sensors, and radar to perceive its environment.[8] Figure 3 illustrates how Tesla's sensor fusion approach allows the vehicle to create a detailed representation of its surroundings, facilitating navigation through complex driving scenarios with high accuracy.
• Adaptive Learning Algorithms: Tesla continuously collects data from its fleet to improve its algorithms. This real-world data allows the system to learn and adapt to new driving conditions, enhancing its decision-making process over time.
• Challenges: Despite its advancements, Tesla's system has faced challenges, particularly in situations where sensor input is ambiguous or unexpected, such as faded lane markings or sudden changes in road conditions. These scenarios highlight the limitations of current AI systems in dealing with the unpredictability of real-world driving.

Figure 3. Tesla shows what Autopilot cameras see and manage
4.3. Comparative Analysis: Waymo vs. Tesla
"While the headline 'Tesla vs. Waymo: Welches selbstfahrende Auto ist schneller?' (Which self-driving car is faster?) draws attention to speed as a point of comparison, it's important to contextualize such metrics within the broader objectives of autonomous vehicle technology. Speed, while a quantifiable and comparative metric, should not overshadow the critical aspects of safety, reliability, and adaptability that are paramount in the development and evaluation of self-driving cars."

Figure 4. Tesla vs. Waymo: Welches selbstfahrende Auto ist schneller?
• Sensor Fusion: Waymo employs a combination of LiDAR [9], cameras, and radar for sensing the environment, which contrasts with Tesla's decision to forgo LiDAR. Waymo's use of LiDAR allows for more detailed 3D mapping of its surroundings, potentially offering better performance in complex environments. However, this comes at a higher cost and energy consumption.
• Adaptive Learning: Both companies leverage vast amounts of data to train their AI systems. However, Waymo benefits from Google's extensive experience in AI and machine learning, enabling more sophisticated algorithms that can predict and respond to a wider range of scenarios.
• Energy-Efficient Driving Strategies: Waymo's focus on fully autonomous driving (Level 4) allows it to optimize routes and driving styles more effectively than Tesla's Level 2 Autopilot, potentially leading to greater energy efficiency. However, Tesla's widespread deployment provides it with more real-world data, which can be used to enhance its energy-saving strategies over time.
• Challenges: Both systems face challenges in terms of sensor limitations and computational demands. Waymo's reliance on LiDAR adds cost and complexity, while Tesla must deal with the limitations of camera-based systems in poor visibility conditions.
4.4. Analysis and Recommendations
To overcome these challenges, a balanced approach that considers both the benefits and drawbacks of current technologies is essential. For instance, while data overload presents a problem, advancements in edge computing and data compression techniques can mitigate these issues by processing data closer to the source and reducing the amount of data that needs to be transmitted.
Improving integration complexity requires a concerted effort to standardize sensor interfaces and develop more robust algorithms that can handle diverse data types efficiently. Additionally, leveraging machine learning techniques to predict and adapt to driving conditions can help optimize energy consumption, addressing the energy constraints faced by autonomous vehicles.
4.5. Conclusion
In conclusion, the efficiency of AI in autonomous driving is a multifaceted issue that encompasses learning algorithms, sensor fusion, and energy-efficient strategies. While significant progress has been made, ongoing research and development are crucial to address the current challenges. By focusing on adaptive learning, efficient data integration, and energy conservation, the future of autonomous driving looks promising, offering safer, more efficient, and environmentally friendly transportation options.
5. Expected Results and Future Outlook
The integration of Artificial Intelligence (AI) into autonomous driving systems represents a significant advancement in the pursuit of safer, more efficient, and environmentally friendly transportation. Based on a comprehensive review and analysis of current technologies and methodologies, several anticipated outcomes and future perspectives can be projected.
5.1. Expected Results
Enhanced Safety and Reduced Human Error: With the continuous improvement of adaptive learning algorithms and sensor fusion techniques, autonomous driving systems are expected to significantly reduce traffic accidents caused by human error. The AI's ability to learn from vast datasets and make real-time decisions will lead to safer driving conditions.
• Increased Efficiency and Traffic Flow: AI-driven autonomous vehicles are anticipated to optimize driving patterns, leading to smoother traffic flow and reduced congestion [10]. This efficiency not only saves time but also contributes to lower fuel consumption and reduced emissions.
• Energy Conservation: The implementation of energy-efficient driving strategies, powered by AI, is expected to result in more sustainable transportation options. Electric and hybrid autonomous vehicles [11], optimized for energy conservation, are anticipated to play a crucial role in reducing the carbon footprint of transportation systems.
• Widespread Adoption of Autonomous Vehicles: As challenges related to data overload, integration complexity, and energy constraints are addressed, the widespread adoption of autonomous vehicles is expected to accelerate. Figure 5, "Timeline for adoption of autonomous vehicles by Morgan Stanley," illustrates this anticipated progression, highlighting key milestones in the journey towards mainstream acceptance. This will mark a significant shift in how society views and utilizes transportation, moving closer to a future where autonomous driving is the norm rather than the exception.
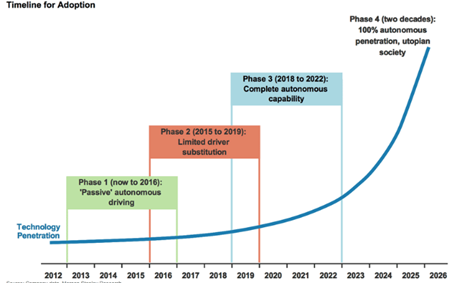
Figure 5. Timeline for adoption of autonomous vehicles by Morgan Stanley.
5.2. Future Outlook
The journey towards fully autonomous driving is an ongoing process, filled with challenges and opportunities. Looking to the future, several key areas emerge as critical for the continued development and success of AI in autonomous driving:
• Advancements in AI and Machine Learning: Continued research and innovation in AI and machine learning algorithms are essential [12]. This includes the development of more sophisticated models that can better handle the unpredictability of real-world driving scenarios and efficiently process the massive amounts of data generated by autonomous vehicles.
• Improved Sensor Technology: The evolution of sensor technology, including cameras, LiDAR, and radar, will enhance the perception capabilities of autonomous vehicles. This will allow for more accurate object detection and tracking, further improving safety and reliability.
• Collaboration and Standardization: Collaboration between industry stakeholders, including manufacturers, technology providers, and regulatory bodies, is crucial. Standardizing sensor interfaces, data formats, and communication protocols will facilitate the integration of diverse systems and accelerate the deployment of autonomous vehicles.
Public Acceptance and Trust: Building public trust in autonomous driving technology is paramount. This involves not only demonstrating the safety and reliability of autonomous vehicles but also addressing privacy and ethical concerns associated with AI.
6. Conclusion
In conclusion, the integration of AI in autonomous driving represents not just a technological leap but a paradigm shift in transportation. The fusion of deep learning, sensor fusion, and energy-efficient strategies within autonomous vehicles is paving the way for a future where roads are safer, commutes are more efficient, and environmental impact is significantly reduced. This study underscores the transformative potential of AI-driven autonomous vehicles, highlighting the importance of continued research and development in this field to achieve these promising outcomes.
The promise of AI-powered autonomous driving extends beyond convenience. It has the potential to reshape urban landscapes by reducing the need for parking spaces, cutting down traffic congestion, and providing mobility for those who are currently unable to drive [13]. Autonomous vehicles could also revolutionize the logistics industry, ensuring goods are transported more reliably and cost-effectively.
However, realizing this future requires us to overcome present-day challenges. The need for extensive data to train deep learning models, the quest for robust algorithms that can handle unpredictable road scenarios, and the imperative for energy-efficient computing resources are just a few of the hurdles that must be surmounted. Moreover, ethical considerations such as privacy, security, and the impact on employment within the driving sector need careful deliberation.
Continuous improvement and innovation are the keys to unlocking the full potential of autonomous vehicles. This involves not only technological advancements but also the development of regulatory frameworks, infrastructure, and public acceptance. As AI systems for autonomous driving are refined, it is essential to ensure that these systems align with societal values and contribute positively to collective well-being.
The journey ahead is indeed complex, filled with both technical intricacies and broader societal implications. The vision of autonomous vehicles cruising the streets is no longer a question of 'if' but 'when'. As researchers, engineers, policymakers, and society at large work towards this future, it is crucial to maintain a balance between enthusiasm for innovation and caution for safety and ethics.
The expected results are compelling: a reduction in traffic accidents caused by human error, a decrease in emissions through optimized driving patterns, and an increase in accessible transportation options. These outcomes guide our efforts and fuel our imagination of what is possible. With each step forward, we are not only engineering vehicles but also crafting the fabric of a future society—one that embraces the transformative power of AI on the roads and beyond.
Figure 6 illustrates one of these transformative possibilities: with autonomous driving, people can work from their cars. This capability not only enhances productivity but also redefines the very concept of commuting, making travel time more efficient and enjoyable. As we continue to innovate, such advancements demonstrate how AI can seamlessly integrate into our daily lives, further validating the profound impact autonomous vehicles will have on society.
Figure 6. With autonomous driving, people can work from their cars
References
[1]. Wang, L., Zhang, X., Song, Z., & Bi, J. (2023). Multi-modal 3D object detection in autonomous driving: A survey and taxonomy. IEEE Transactions on Intelligent Vehicles, PP(99), 1-19. https://doi.org/10.1109/TIV.2023.3264658
[2]. Dong, H., Zhuang, W., Chen, B., et al. (2022). A comparative study of energy-efficient driving strategy for connected internal combustion engine and electric vehicles at signalized intersections. Applied Energy, 306, 118524. https://doi.org/10.1016/j.apenergy.2022.118524
[3]. Grigorescu, S., Trasnea, B., Cocias, T., & Macesanu, G. (2019). A survey of deep learning techniques for autonomous driving. Journal of Field Robotics. https://doi.org/10.1002/rob.21918
[4]. Uçar, A., Demir, Y., & Güzeliş, C. (2017). Object recognition and detection with deep learning for autonomous driving applications. SAGE Journal, 93(9). https://doi.org/10.1177/00375497177099
[5]. K. Arulkumaran, M. P. Deisenroth, M. Brundage and A. A. Bharath, "Deep Reinforcement Learning: A Brief Survey, " in IEEE Signal Processing Magazine, vol. 34, no. 6, pp. 26-38, Nov. 2017, doi: 10.1109/MSP.2017.2743240.
[6]. Dwivedi, R., Dave, D., Naik, H., et al. (2023). Explainable AI (XAI): Core ideas, techniques, and solutions. ACM Computing Surveys, 55(9), Article 194, 1-33. https://doi.org/10.1145/3561048
[7]. Zhao, J., Zhao, W., Deng, B., et al. (2023). Autonomous driving system: A comprehensive survey. Expert Systems with Applications, 122836. https://doi.org/10.1016/j.eswa.2023.122836
[8]. Caesar, H. (n.d.). NuScenes: A Multimodal dataset for Autonomous Driving. ar5iv. https://www.arxiv-vanity.com/papers/1903.11027/.
[9]. Sun, P., Kretzschmar, H., Dotiwalla, X., et al. (2020). Scalability in perception for autonomous driving: Waymo open dataset. Affiliation: Waymo LLC, Google LLC.
[10]. Petrou, A. (2023). AI-driven systems for autonomous vehicle traffic flow optimization and control. Journal of AI-Assisted Scientific Discovery, 3(2), 221–241. https://scienceacadpress.com/index.php/jaasd/article/view/98
[11]. Vermesan, O., John, R., Pype, P., et al. (2021). Automotive intelligence embedded in electric connected autonomous and shared vehicles technology for sustainable green mobility. Frontiers in Future Transportation, 2. https://doi.org/10.3389/ffutr.2021.688482
[12]. Atakishiyev, S., Salameh, M., Yao, H., & Goebel, R. (2024). Explainable artificial intelligence for autonomous driving: A comprehensive overview and field guide for future research directions. IEEE Access. https://doi.org/10.1109/ACCESS.2024.3431437
[13]. Cohen, S. A., & Hopkins, D. (2019). Autonomous vehicles and the future of urban tourism. Annals of Tourism Research, 74, 33-42. https://doi.org/10.1016/j.annals.2018.10.009
Cite this article
Wang,Y. (2024). The Review of AI Efficiency in Autonomous Driving. Applied and Computational Engineering,113,92-100.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Wang, L., Zhang, X., Song, Z., & Bi, J. (2023). Multi-modal 3D object detection in autonomous driving: A survey and taxonomy. IEEE Transactions on Intelligent Vehicles, PP(99), 1-19. https://doi.org/10.1109/TIV.2023.3264658
[2]. Dong, H., Zhuang, W., Chen, B., et al. (2022). A comparative study of energy-efficient driving strategy for connected internal combustion engine and electric vehicles at signalized intersections. Applied Energy, 306, 118524. https://doi.org/10.1016/j.apenergy.2022.118524
[3]. Grigorescu, S., Trasnea, B., Cocias, T., & Macesanu, G. (2019). A survey of deep learning techniques for autonomous driving. Journal of Field Robotics. https://doi.org/10.1002/rob.21918
[4]. Uçar, A., Demir, Y., & Güzeliş, C. (2017). Object recognition and detection with deep learning for autonomous driving applications. SAGE Journal, 93(9). https://doi.org/10.1177/00375497177099
[5]. K. Arulkumaran, M. P. Deisenroth, M. Brundage and A. A. Bharath, "Deep Reinforcement Learning: A Brief Survey, " in IEEE Signal Processing Magazine, vol. 34, no. 6, pp. 26-38, Nov. 2017, doi: 10.1109/MSP.2017.2743240.
[6]. Dwivedi, R., Dave, D., Naik, H., et al. (2023). Explainable AI (XAI): Core ideas, techniques, and solutions. ACM Computing Surveys, 55(9), Article 194, 1-33. https://doi.org/10.1145/3561048
[7]. Zhao, J., Zhao, W., Deng, B., et al. (2023). Autonomous driving system: A comprehensive survey. Expert Systems with Applications, 122836. https://doi.org/10.1016/j.eswa.2023.122836
[8]. Caesar, H. (n.d.). NuScenes: A Multimodal dataset for Autonomous Driving. ar5iv. https://www.arxiv-vanity.com/papers/1903.11027/.
[9]. Sun, P., Kretzschmar, H., Dotiwalla, X., et al. (2020). Scalability in perception for autonomous driving: Waymo open dataset. Affiliation: Waymo LLC, Google LLC.
[10]. Petrou, A. (2023). AI-driven systems for autonomous vehicle traffic flow optimization and control. Journal of AI-Assisted Scientific Discovery, 3(2), 221–241. https://scienceacadpress.com/index.php/jaasd/article/view/98
[11]. Vermesan, O., John, R., Pype, P., et al. (2021). Automotive intelligence embedded in electric connected autonomous and shared vehicles technology for sustainable green mobility. Frontiers in Future Transportation, 2. https://doi.org/10.3389/ffutr.2021.688482
[12]. Atakishiyev, S., Salameh, M., Yao, H., & Goebel, R. (2024). Explainable artificial intelligence for autonomous driving: A comprehensive overview and field guide for future research directions. IEEE Access. https://doi.org/10.1109/ACCESS.2024.3431437
[13]. Cohen, S. A., & Hopkins, D. (2019). Autonomous vehicles and the future of urban tourism. Annals of Tourism Research, 74, 33-42. https://doi.org/10.1016/j.annals.2018.10.009