






1. Introduction
In robotics and automation, Inertial Measurement Units (IMUs) have become essential sensors, frequently used in areas such as robot balance control, motion tracking, and flexibility compensation. Traditional control methods for robots typically depend on force/torque sensors to assess contact forces and moments, which allows for precise control of posture and movement. Nevertheless, these sensors come with drawbacks, including high costs, complexity, and sensitivity to external environments. In response to these challenges, IMU technology has become a more adaptable and cost-efficient solution for sensing and control in robotic systems.
IMUs are sensors that incorporate accelerometers and gyroscopes to gauge an object's acceleration, angular velocity, and changes in orientation. By combining IMU data with mathematical models or filtering techniques such as the Extended Kalman Filter (EKF), individuals can accurately estimate a robot's posture, position, and motion state. This approach is especially beneficial in cases where traditional force/torque sensors are absent, simplifying system design and lowering costs.
Using IMUs has increasingly become standard in energetic balance control for robots. As robots are deployed across various applications, notably in scenarios that involve flexible deformations—such as flexible components in robot feet or joints—traditional sensors often have difficulty managing these detailed energetic environments. By merging IMU data with geometric deformation models, researchers can achieve real-time estimations of contact forces and moments without needing force sensors. This advancement dramatically enhances a robot's stability in difficult and energetic settings.
In addition to their wide usage in robot balance control, IMU technology is also instrumental in joint state estimation and motion tracking. This aspect is particularly critical for floating-base robots, which frequently encounter stability challenges due to shifting load conditions. By integrating IMU data with the EKF algorithm, accurate measurements of joint velocity and acceleration can be obtained, thus improving the stiffness and damping performance of the control systems. Beyond robotics, IMU technology has considerably impacted industrial and rehabilitation sectors. In industrial settings, IMUs are used to recognize gestures in complex environments, providing high accuracy and energy efficiency. In rehabilitation therapy, IMU sensors are capable of monitoring patients' movements in real time, offering valuable feedback to therapists and enhancing treatment outcomes. These diverse applications emphasize the wide-ranging applicability and potential of IMU technology in various fields. This context provides the basis for our research, which investigates the critical role of IMUs in robot control, industrial applications, and rehabilitation therapy, emphasizing their significance in future advancements.
2. Balance control of humanoid robot based on inertial measurement unit
2.1. Application of IMU in Robot Flexibility Compensation and Dynamic Balance Control
This paper proposes an IMU-based flexibility compensation and balance control method that replaces traditional control strategies relying on force/torque sensors. The proposed observer combines IMU sensors with geometric deformation models to achieve real-time estimation of robot contact forces and moments without using force sensors. Experimental results show that this method, operating at 200 Hz, maintains an estimation error below 5%, leading to a marked enhancement in the robot’s balance stability, particularly in dynamic environments. In addition, it successfully withstands external disturbances and internal deformations from flexible components, like foot soles and joint elements, thereby ensuring accurate control of the robot in challenging contact situations [1].
The experimental setup includes two key tests that illustrate the effectiveness of this approach. The hand component experiment (Figure 1) demonstrates the observer’s ability to maintain stable hand positions despite body flexibility. Different stages of movement, represented in various colors, show how the robot compensates for deformations, aiming to keep the hand positions constant even when the body experiences flexibility-induced displacements.
In addition, the CoP estimation with sensor feedback (Figure 2) validates the observer’s performance in estimating the center of pressure (CoP) under external perturbations. The plot compares real and estimated CoP positions along the X and Y axes. The close alignment between the real and estimated values, especially after the initial oscillations, highlights the effectiveness of sensor feedback in achieving accurate CoP reconstruction. This consistency between estimated and real CoP positions demonstrates the robustness of the IMU-based observer in maintaining stability and accurate control in the presence of disturbances.
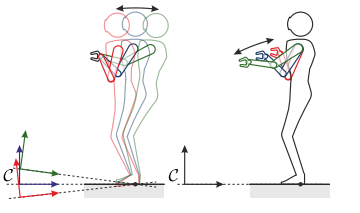
Figure 1: Hand component experiment [1]
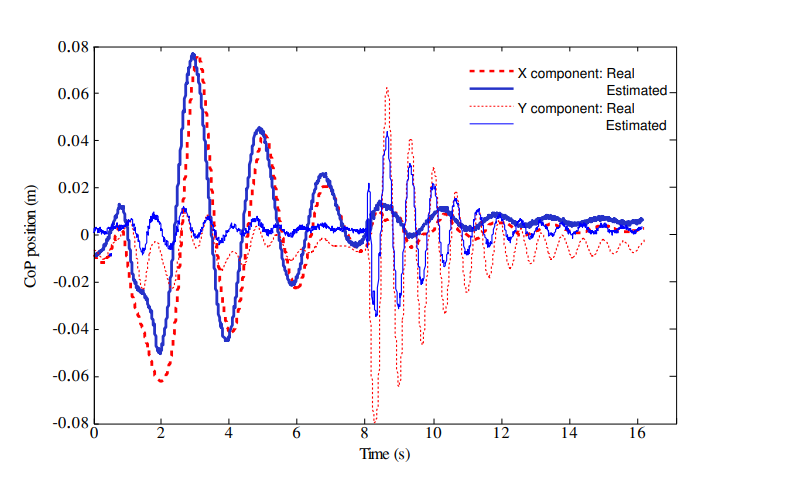
Figure 2: With sensor feedback [1]
Similarly, the next study delves deeper into the specific impact of flexible deformation on the accuracy of estimating a robot's pose and position. It also introduces a energetic balance control strategy that combines IMU data with flexible contact modeling. The researchers use elastic and damping models to illustrate the connection between flexible deformation and contact torques. They implement an Extended Kalman Filter (EKF) to merge IMU data with geometric models, allowing for real-time estimation of contact forces and torques. The findings show that this method, operating at 100 Hz, reduces contact force estimation errors to within 8 N·m. This improvement considerably enhances the robot's balance control abilities in detailed energetic environments. What's more, this strategy effectively addresses the energetic impacts of flexible components such as the robot's feet and joints, thereby improving the robot's ability to resist disturbances [2].
Another related paper introduces an IMU-based flexibility state estimation method for the HRP-2 robot. This method achieves real-time estimation of flexibility states without using force sensors by incorporating a flexible contact model and an EKF filter. This method maintains an attitude estimation error of within 0.2 degrees and a position estimation error of less than 1 cm at a sampling rate of 200 Hz, significantly improving the HRP-2 robot’s dynamic balance under flexible deformation and external disturbances. The experimental results demonstrate that the method maintains a balance stability of up to 95% under high stiffness and large-range flexibility variations. This provides a new solution for controlling flexible robots in complex environments [3].
Expanding on the theme of flexible control, another paper presents a flexible state observer that fuses IMU data with geometric models to estimate contact forces and moments in real-time, considering the influence of flexible components. This method enables the accurate reconstruction of energetic variations in contact forces and moments by overlaying geometric model information onto IMU measurement data, all without needing force sensors. The experimental results demonstrate that the observer keeps contact force estimation errors under 5 N·m, even in conditions of significant flexible deformation. Additionally, it achieves balance stability exceeding 95% in energetic settings. This research provides theoretical support for IMU-based flexible robot state estimation [4].
Finally, an additional study examines techniques for compensating energetic balance and flexibility using IMU technology. By implementing a flexible contact model and fusing it with IMU data through an EKF strategy, the research achieves energetic balance control without relying on force sensors. The experimental findings indicate that the method keeps pose and position estimation errors below 2% despite the presence of flexible components and achieves a balance stability exceeding 90% when faced with external disturbances. This shows that integrating IMU sensors with geometric models can considerably improve a robot's flexibility compensation abilities, offering an effective approach to energetic balance control in robots that do not use force sensors [5].
2.2. Application of IMU in Robot Motion and Posture Estimation
In addition to flexibility compensation, IMU technology is also applied to robot motion tracking, joint state estimation, and posture control. This paper introduces an IMU-based joint state estimation method for floating-base robots, enabling precise estimation of joint velocities and accelerations without using joint encoders. By combining IMU data with an Extended Kalman Filter (EKF), this method achieves stable motion tracking under various load conditions. Experimental results show that the method maintains joint velocity estimation errors below 0.1 rad/s and acceleration errors below 0.05 rad/s² in both static and dynamic scenarios. Additional analysis shows that this approach greatly improves the stiffness and damping performance of the control system, leading to a 15% increase in energetic stability. This creates a solid basis for upcoming research in energetic robot control [6].
Another paper shifts the focus to a review of recent applications of IMU in full-body motion capture and state estimation systems. The study shows that IMU-vision fusion can improve pose estimation accuracy by 30%, while IMU-force sensor fusion can reduce interference errors by about 20%. In addition, the paper evaluates the performance data of 42 IMU products and emphasizes that the sampling rate and power consumption are essential elements that affect motion capture performance. Statistical data reveal that Xsens and InvenSense dominated the IMU application market between 2016 and 2020, collectively accounting for 47.19% of market share. This positions them as mainstream choices for both research and commercial applications. Figure 3 shows the IMU’s companies trend lines per year, it shows the information this paper mentioned before [7].
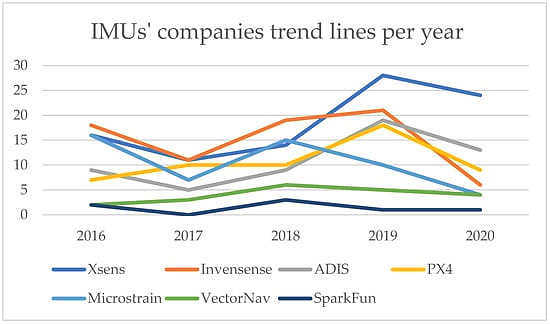
Figure 3: IMU’s companies trend line [3]
Further exploring motion tracking, another paper introduces a novel method for remote control and gait imitation of humanoid robots using IMU technology.. The researchers use the Xsens MVN system to capture real-time human walking data and convert it into robot control inputs, enabling the robot to imitate human gait. Experimental results show that Mahru-R successfully imitates human gait with a stride estimation error of less than 10 cm and a rotation angle error of less than 2 degrees. Although there are some kinematic differences, this method demonstrates good real-time performance and robustness in remote control scenarios, laying the foundation for future research on upper-body motion imitation and time delay reduction [8].
Additionally, another paper presents an IMU-based posture control strategy for humanoid robots, inspired by the human vestibular system, to enhance balance under external disturbances. Unlike traditional humanoid robots that rely on Zero Moment Point (ZMP) control, the proposed method employs a Disturbance Estimation and Compensation (DEC) model, which integrates IMU sensor data (measuring trunk and head angular velocity, angles, and linear acceleration) with joint angle and torque sensor data to achieve accurate estimation and compensation of the robot's posture and external disturbances. The DEC model dynamically adjusts joint torques and posture by sensing the robot’s position, tilt angle, and external forces on the support surface, enabling stability under varying disturbance conditions. Experimental results demonstrate that the humanoid robot Posturob II, supported by IMU sensors and the DEC model, can handle various disturbances (e.g., support surface tilt, external pushes) and posture changes, exhibiting human-like coordination and balance capabilities across multiple degrees of freedom (DOF). This study verifies the effectiveness of IMU sensors in enhancing robot balance control in complex environments. It also lays the foundation for achieving more natural and stable dynamic balance control in future humanoid robots [9].
2.3. Application of IMU in Industry and Rehabilitation
Outside of robotics, IMU technology has proven useful in industrial and rehabilitation contexts. This paper proposes a system that combines IMU and robots for pediatric rehabilitation therapy, monitoring children's movements during therapy sessions and providing real-time feedback to therapists to enhance therapeutic outcomes. Experimental results show that the system can accurately identify and capture specific rehabilitation motions and distinguish different motion patterns based on quaternion data. The system achieves over 95% action recognition accuracy, significantly enhancing children's engagement in rehabilitation training. Compared to traditional vision-based systems such as Kinect, the IMU-based system can better overcome occlusion issues, providing a reliable solution for motion capture and analysis in rehabilitation therapy [10].
In a different context, another paper examines the use and performance comparison of wearable devices that use Inertial Measurement Units (IMUs) alongside vision systems for recognizing human-robot interaction gestures in remanufacturing processes. It presents a Low-Frequency Movement Characterization Algorithm (LoMoCA) designed to extract gesture features from IMU data and contrasts these findings with data obtained from the Microsoft Kinect v2 RGB-D device. The findings reveal that the IMU-based OperaBLE wristband considerably surpasses Kinect in terms of motion recognition accuracy, particularly within complex environments and energetic situations. OperaBLE achieved recognition rates that exceeded 90%, while Kinect's performance declined greatly in conditions such as limited lighting and greater distance. OperaBLE's power consumption is 950 times lower than Kinect's, making it more suitable for long-term industrial monitoring. This study emphasizes the effectiveness and energy efficiency of IMU devices for accurate gesture recognition in industrial environments, offering valuable insights for the development of future human-robot interaction systems in robot-assisted remanufacturing [11][12].
3. Conclusion
Inertial Measurement Units (IMUs) are used in various fields such as robotics, industrial automation, and rehabilitation therapy. Within robotics, IMU technology assists flexibility compensation, energetic balance control, motion tracking, and posture estimation, thereby replacing conventional force/torque sensors. When IMU data is combined with models and filtering algorithms like the Extended Kalman Filter, robots can achieve enhanced stability and accuracy in complex environments. Beyond their application in robotics, IMUs demonstrate high motion recognition precision in industrial settings and improve rehabilitation outcomes by providing real-time feedback on patients’ movements, emphasizing their adaptability across different sectors.
The future of IMU technology looks promising as it continues to advance in robotics and other areas. In robotics, further integration with vision systems, artificial intelligence, and machine learning algorithms has the potential to enhance real-time motion tracking and energetic balance control, enabling robots to function in more unpredictable and flexible environments. Control systems enhanced by IMUs could evolve to be more autonomous, allowing for the management of complex tasks with increased precision and adaptability. What's more, wearable IMU devices are expected to proliferate in healthcare, assisting continuous monitoring, optimizing sports performance, and even enabling augmented reality applications. With improvements in energy efficiency and data processing capabilities, IMUs may pave the way for the development of more sophisticated and intelligent systems. In industrial environments, IMUs could further improve human-robot interaction, enhancing gesture recognition, safety, and efficiency in remanufacturing processes. These advancements will solidify IMU technology as a critical element in the future of robotics, healthcare, and industrial automation.
References
[1]. Mifsud, A., Benallegue, M., & Lamiraux, F. (2015). Estimation of contact forces and floating base kinematics of a humanoid robot using only Inertial Measurement Units. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3374-3379).
[2]. Benallegue, M., & Lamiraux, F. (2015). Estimation and Stabilization of Humanoid Flexibility Deformation Using Only Inertial Measurement Units and Contact Information. International Journal of Humanoid Robotics, 12(03), 1550025.
[3]. Benallegue, M., & Lamiraux, F. (2014). Humanoid flexibility deformation can be efficiently estimated using only inertial measurement units and contact information. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (pp. 246-251).
[4]. Benallegue, M., Mifsud, A., & Lamiraux, F. (2015). Fusion of force-torque sensors, inertial measurements units and proprioception for a humanoid kinematics-dynamics observation. In Proceedings of the IEEE-RAS 15th International Conference on Humanoid Robots (pp. 664-669).
[5]. Ferrete Ribeiro, N., & Santos, C. P. (2017). Inertial measurement units: A brief state of the art on gait analysis. In Proceedings of the IEEE 5th Portuguese Meeting on Bioengineering (pp. 1-4).
[6]. Mifsud, A., Benallegue, M., & Lamiraux, F. (2016). Stabilization of a compliant humanoid robot using only Inertial Measurement Units with a viscoelastic reaction mass pendulum model. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 5405-5410).
[7]. Rotella, N., Mason, S., Schaal, S., & Righetti, L. (2016). Inertial sensor-based humanoid joint state estimation. In Proceedings of the IEEE International Conference on Robotics and Automation (pp. 1825-1831).
[8]. Samatas, G. G., & Pachidis, T. P. (2022). Inertial Measurement Units (IMUs) in Mobile Robots over the Last Five Years: A Review. Designs, 6(1), 17. https://doi.org/10.3390/designs6010017
[9]. Kim, S. K., Hong, S., & Kim, D. (2009). A walking motion imitation framework of a humanoid robot by human walking recognition from IMU motion data. In Proceedings of the 9th IEEE-RAS International Conference on Humanoid Robots (pp. 343-348).
[10]. Zebenay, M., Lippi, V., & Mergener, T. (2015). Human-like humanoid robot posture control. In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (pp. 304-309).
[11]. Guneysu, A., Arnrich, B., & Ersoy, C. (2015). Children's rehabilitation with humanoid robots and wearable inertial measurement units. In Proceedings of the 9th International Conference on Pervasive Computing Technologies for Healthcare (pp. 249-252).
[12]. Roda-Sanchez, L., Garrido-Hidalgo, C., García, A. S., Olivares, T., & Fernández-Caballero, A. (2023). Comparison of RGB-D and IMU-based gesture recognition for human-robot interaction in remanufacturing. The International Journal of Advanced Manufacturing Technology, 124, 3099-3111. https://doi.org/10.1007/s00170-021-08125-9
Cite this article
Zhang,Z. (2025). Research on Balance Control of Humanoid Robot Based on Inertial Measurement Unit. Applied and Computational Engineering,136,8-14.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 5th International Conference on Materials Chemistry and Environmental Engineering
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Mifsud, A., Benallegue, M., & Lamiraux, F. (2015). Estimation of contact forces and floating base kinematics of a humanoid robot using only Inertial Measurement Units. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 3374-3379).
[2]. Benallegue, M., & Lamiraux, F. (2015). Estimation and Stabilization of Humanoid Flexibility Deformation Using Only Inertial Measurement Units and Contact Information. International Journal of Humanoid Robotics, 12(03), 1550025.
[3]. Benallegue, M., & Lamiraux, F. (2014). Humanoid flexibility deformation can be efficiently estimated using only inertial measurement units and contact information. In Proceedings of the IEEE-RAS International Conference on Humanoid Robots (pp. 246-251).
[4]. Benallegue, M., Mifsud, A., & Lamiraux, F. (2015). Fusion of force-torque sensors, inertial measurements units and proprioception for a humanoid kinematics-dynamics observation. In Proceedings of the IEEE-RAS 15th International Conference on Humanoid Robots (pp. 664-669).
[5]. Ferrete Ribeiro, N., & Santos, C. P. (2017). Inertial measurement units: A brief state of the art on gait analysis. In Proceedings of the IEEE 5th Portuguese Meeting on Bioengineering (pp. 1-4).
[6]. Mifsud, A., Benallegue, M., & Lamiraux, F. (2016). Stabilization of a compliant humanoid robot using only Inertial Measurement Units with a viscoelastic reaction mass pendulum model. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 5405-5410).
[7]. Rotella, N., Mason, S., Schaal, S., & Righetti, L. (2016). Inertial sensor-based humanoid joint state estimation. In Proceedings of the IEEE International Conference on Robotics and Automation (pp. 1825-1831).
[8]. Samatas, G. G., & Pachidis, T. P. (2022). Inertial Measurement Units (IMUs) in Mobile Robots over the Last Five Years: A Review. Designs, 6(1), 17. https://doi.org/10.3390/designs6010017
[9]. Kim, S. K., Hong, S., & Kim, D. (2009). A walking motion imitation framework of a humanoid robot by human walking recognition from IMU motion data. In Proceedings of the 9th IEEE-RAS International Conference on Humanoid Robots (pp. 343-348).
[10]. Zebenay, M., Lippi, V., & Mergener, T. (2015). Human-like humanoid robot posture control. In Proceedings of the 12th International Conference on Informatics in Control, Automation and Robotics (pp. 304-309).
[11]. Guneysu, A., Arnrich, B., & Ersoy, C. (2015). Children's rehabilitation with humanoid robots and wearable inertial measurement units. In Proceedings of the 9th International Conference on Pervasive Computing Technologies for Healthcare (pp. 249-252).
[12]. Roda-Sanchez, L., Garrido-Hidalgo, C., García, A. S., Olivares, T., & Fernández-Caballero, A. (2023). Comparison of RGB-D and IMU-based gesture recognition for human-robot interaction in remanufacturing. The International Journal of Advanced Manufacturing Technology, 124, 3099-3111. https://doi.org/10.1007/s00170-021-08125-9