






1. Introduction
The problems caused by space debris have become a significant concern for space exploration [1]. Space debris refers to human-made objects that travel through space without serving any functional purpose. These orbital debris primarily consist of intact rocket bodies, objects expelled from missions (such as exhaust products, spacecraft components, astronaut waste, and lost property), fragments from spacecraft surface materials, and other discarded objects [2]. Currently, hundreds of millions of pieces of space debris orbit Earth, posing serious threats to spacecraft and astronauts [3]. Space debris can be categorized based on size. Debris smaller than 1 cm is typically blocked by spacecraft protective equipment, causing only minor surface wear. Debris ranging from 1 cm to 10 cm in size can damage spacecraft structures or penetrate astronauts' spacesuits, potentially leading to catastrophic consequences if a collision occurs with a spacecraft's main body. Debris larger than 10 cm poses an even greater risk, with the potential to completely destroy a spacecraft upon impact [4]. Another concern is the possibility of space debris falling to Earth. While most debris burns up upon atmospheric entry, larger spacecraft fragments may survive reentry, leading to potential loss of life and property. Additionally, as the amount of debris increases, reflected light pollution becomes more pronounced, interfering with astronomical observations. Space debris can also disrupt radio telescope signals and distort images captured by ground-based telescopes [4]. Moreover, space debris results in the depletion of valuable orbital resources. Space agencies must carefully schedule spacecraft launches to avoid potential collisions, a process known as launch warning. During this process, launch centers predict whether a newly launched spacecraft is at risk of colliding with debris and adjust launch timing accordingly. The growing amount of space debris reduces available orbital space, making future space exploration increasingly challenging. In 1978, NASA scientist Donald Kessler proposed the "Kessler Syndrome" theory, which predicts that the increasing density of space debris in low Earth orbit will lead to a chain reaction of collisions, exacerbating space pollution and increasing satellite collision risks. Once debris density reaches a critical threshold, cascading collisions will render certain orbital regions permanently unusable [5]. The potential threat of this phenomenon cannot be ignored.

Figure 1: Space debris [6]
The number of space debris continues to increase, primarily due to the growing pace of human space exploration and the absence of relevant laws to clarify liability for space debris [2]. Consequently, the negative effects of space debris are further exacerbated. According to statistics, approximately 6,710 rocket launches have taken place worldwide since 1957. Currently, about 19,160 spacecraft are in Earth’s orbit, but only approximately 10,200 remain operational, accounting for around 53.24% of the total.
Space activities further contribute to the accumulation of space debris. According to the European Space Agency (ESA), in 2019, the number of space debris fragments larger than 10 cm was estimated to be approximately 34,000 [7].
Table 1: Number of space debris by size [7]
size | Number |
Size greater than 10cm | about40500 |
The size is 1~10cm | about1100000 |
Size less than 1cm | about130000000 |
Currently, space debris continues to accumulate gradually, yet there is no universal solution for its mitigation. Depending on the size of the debris, different strategies are employed. For debris smaller than 1 cm, although the quantity is vast, tracking and monitoring are challenging due to its small size [8]. Typically, protective shielding is installed on spacecraft to mitigate the risk posed by such debris [9].
For debris larger than 10 cm, the potential damage is severe. However, such debris is easier to track and monitor. To address this threat, in-orbit early warning systems are implemented, allowing predictions of potential collisions between spacecraft and debris. Collision avoidance maneuvers involve two main approaches: adjusting the spacecraft’s arrival time at the debris’ orbital intersection to prevent impact or altering the spacecraft’s orbit by raising or lowering it [10]. However, for debris measuring between 1 and 10 cm, an effective and consistent monitoring program remains lacking.
These challenges indicate that the measures currently proposed by the International Aviation Organization are insufficient to curb the exponential growth of space debris [10]. Given the increasing volume of space debris, ensuring the sustainable development of space activities and reducing operational risks for spacecraft have become urgent priorities. Space debris removal has emerged as a critical solution, aiming to clear hazardous debris from essential orbits by deorbiting them into lower altitudes, where they burn up in the atmosphere [2]. Currently, space debris removal methods are categorized into two main types: contact and non-contact approaches [1]. The first approach involves direct physical interaction with debris to deorbit it. Specific techniques include robotic arms (single-arm or multi-arm), capture nets, harpoons, and other mechanical solutions. These methods, though theoretically simple and practically feasible, are relatively mature and have undergone extensive testing by various national space agencies. However, key challenges include high launch and fuel costs, managing reaction forces upon contact, addressing the spin of target debris, and ensuring precise navigation [1]. The second approach involves non-contact debris removal techniques, such as laser ablation, adhesive methods, and artificial atmospheric effects. While these methods circumvent the difficulties associated with physical contact, they present their own technical challenges, such as the limitations of laser technology and the complexity of control systems. Nonetheless, in the long term, these methods are expected to be more cost-effective and hold greater potential for development [1].
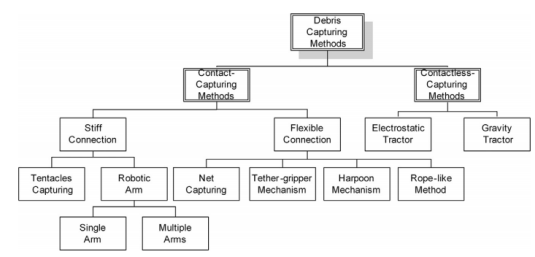
Figure 2: Block diagram of the capture method [1]
Capturing debris using a single robotic arm is a traditional method that has undergone significant research and development. This technique has been extensively tested in ground-based experiments and has accumulated valuable experience in on-orbit servicing [11]. The German Aerospace Center (DLR) demonstrated the capture of non-cooperative targets in the German Orbital Servicing Mission (DEOS). In this mission, the target satellite was an uncooperative, tumbling object with no prior information for rendezvous and capture. The German Aerospace Center has also developed the European Proximity Operations Simulator (EPOS), a facility capable of simulating docking and capture processes at distances ranging from 25 meters to 0 meters.
In conclusion, this paper examines the hazards of space debris and explores the existing solutions. Additionally, it proposes an end-effector execution scheme based on sensors, which is expected to address the issue of excessive self-induced angular velocity in target debris when using a traditional single robotic arm for capture.
2. Debris Monitoring and Sensing
During the Cold War, the space race among nations led to numerous spacecraft being launched into space, contributing to the space debris problem. Initially, debris detection primarily relied on ground-based radar monitoring systems. With advancements in optics, optical telescopes began to be used for debris monitoring, partially compensating for the limitations of radar systems in detecting microsized debris [12]. In the early 21st century, laser sensors were also introduced for space monitoring. Over the past decade, a multi-sensor monitoring approach has been widely adopted by various countries [13]. Led by the United States, several nations have developed radar array-based ground monitoring systems as the primary method for space debris tracking, while optical sensing methods, such as observatories, serve as auxiliary tools. With further advancements in space technology, space monitoring satellites have been launched to establish a comprehensive space target observation system.
Current space debris monitoring can be categorized into ground-based and space-based methods [14]. Ground-based monitoring, which remains the mainstream approach, utilizes facilities on Earth. However, due to limitations in instrument resolution and atmospheric interference, its effectiveness in tracking debris smaller than 10 cm is relatively weak. In contrast, space-based monitoring involves satellite-based tracking systems located outside Earth’s atmosphere, enabling stronger detection capabilities for debris smaller than 10 cm by avoiding atmospheric distortions.
The primary debris tracking methods suitable for space environments include radar, optical sensing, and LiDAR. Radar systems emit pulses of radio waves and analyze the timing, frequency, and intensity of the reflected signals to determine the precise location and orbit of debris. Radar has advantages in real-time monitoring and long-range detection, providing accurate measurements of debris location and detection time. However, it has weaker detection capabilities for smaller debris and lower accuracy overall. Additionally, ground-based radar systems are significantly affected by weather conditions [14]. Optical detection, which employs astronomical telescopes and optical cameras, is another method for tracking space debris. Although optical telescopes typically have a narrow field of view and cannot accurately determine the material composition of debris, they offer higher sensitivity to object size at greater distances compared to radar. The working principle of LiDAR is similar to that of radar, so a detailed explanation is omitted. The primary difference lies in wavelength: LiDAR offers higher accuracy but has a shorter monitoring range. Other monitoring methods include in-situ monitoring, which utilizes space debris sensors installed on satellites or the International Space Station to detect tiny debris upon contact. However, these sensors can only monitor debris that directly interacts with them, making them unsuitable for tracking non-contact debris [15]. This method is classified as passive monitoring. Since this section focuses on active debris monitoring, passive methods will not be explored further.
Currently, LiDAR is considered one of the most promising technologies for space debris monitoring. Its unique advantages include:
• High Precision: LiDAR can achieve centimeter- or even millimeter-level measurement accuracy, which is crucial for precisely determining the location and orbit of space debris.
• Multi-parameter Detection: In addition to distance measurement, LiDAR can obtain data on the speed, shape, size, and surface characteristics of debris, providing comprehensive information for in-depth space debris analysis.
These advantages make LiDAR a suitable choice for space debris detection [16].
However, there are still challenges to overcome before LiDAR can be effectively utilized for debris removal. The main challenges include:
• Limited Detection Range: Due to rapid energy decay, the effective detection distance of LiDAR is relatively short.
• Challenges with Non-Cooperative Targets: The efficiency and accuracy of LiDAR detection may be affected when tracking non-cooperative targets, such as space debris [10].
• Real-time Processing Requirements: Space debris removal requires real-time data processing and response, imposing high demands on computational accuracy and speed.
In recent years, numerous aviation agencies worldwide have conducted experiments on space debris monitoring. For example, the European Space Agency’s (ESA) Space Situational Awareness (SSA) program integrates LiDAR with optical telescopes to achieve high-precision space debris tracking. LiDAR provides accurate range and velocity measurements, while optical telescopes offer high-resolution imaging data. Through sensor fusion technology, the location, shape, and motion trajectory of debris can be more accurately determined [10]. Additionally, the OSIRIS experiment conducted by the German Aerospace Center utilizes LiDAR and optical imaging technology for high-resolution imaging and tracking of space debris. NASA's Laser Optical Debris Sensor (LODS) system also combines LiDAR with optical sensors to monitor and track space debris in low Earth orbit. These experiments have demonstrated that sensor fusion is a mature and feasible approach, representing the mainstream solution for addressing sensor accuracy limitations in space debris monitoring.
3. Manipulator End Actuator
Currently, numerous proposals have been put forward for space debris removal missions. Among these, the use of robotic arms is one of the most mature solutions, having been researched for nearly 40 years. The development of robotic arms for space applications can be broadly divided into several stages. Before 1998, research primarily focused on docking with rotating targets and introduced preliminary concepts for spacecraft free-flight models. Much of the theoretical work centered on remote control, sensor design, and orbit planning. Between 1992 and 2007, robotic arm acquisition missions evolved through three main phases: pursuit, capture-hold, and attenuation-suppression. During this period, researchers worldwide conducted in-depth studies on offsetting the angular momentum of captured targets. However, most research at this stage focused on cooperative tumbling targets. From 2004 to 2018, attention shifted to non-cooperative targets, leading to several significant advancements, including tumbling target identification, dynamic parameter estimation, and torque feedback methods. The scope of study also expanded beyond single rigid arms to explore various robotic arm configurations, such as redundant and dual-arm structures [17].
Currently, research on robotic arm-based space debris removal primarily focuses on two areas: identification and reduction of parameter uncertainty and avoidance and mitigation of uncertainty. The first approach involves extensive parameter identification to enhance modeling accuracy, followed by the use of model-based trajectory planning and tracking methods to achieve successful capture. The second approach acknowledges the inherent uncertainty in space operations while aiming to mitigate its impact. Instead of solely reducing uncertainty, research has shifted towards counteracting and avoiding its effects. This shift implies that improving error tolerance will gradually replace precise model construction as the primary research focus.
End effectors for robotic arms in space debris removal can be categorized into five main types:
• Mechanical Claw End Effectors: These end effectors utilize multiple mechanical claws to achieve a grasping action and represent the most commonly used structure.
• Magnetic End Effectors: These operate by generating electromagnetic currents to capture debris composed of ferromagnetic materials.
• Micro-Spine End Effectors: Inspired by insects and arthropods, these end effectors use an array of protruding spines to grasp surfaces and establish a secure connection.
• Trap End Effectors: These consist of multiple wires that rotate inward around the target debris, causing it to contract and be securely held.
• Gecko Adhesive End Effectors: These employ an adhesive film layer to grip objects. Adhesive films can also be incorporated into other end effectors to enhance capture through adhesion.
Studies indicate that mechanical claw end effectors are the most effective in terms of volume, mass, and degrees of freedom, making them the optimal choice for space debris removal tasks [18].
Robotic arms have long been used for in-orbit maintenance and servicing missions due to their advantages, such as rigid attachment to target objects, well-established ground testing methods, and mature technology. However, when applying robotic arms to space debris removal, three primary challenges must be addressed:
• Impact Reduction at Contact: Upon making contact with the target debris, the satellite experiences a counterforce due to the kinetic energy of the debris. This impact must be minimized to prevent destabilization.
• Target De-tumbling: Space debris often possesses residual angular momentum, causing it to tumble. This uncontrolled motion complicates capture attempts.
• Attitude Synchronization: Before capture, the satellite must maintain a precise relative distance and orientation with respect to the target debris.
Given these challenges, existing single-arm robotic capture technologies cannot be directly applied to space debris removal without modifications [1].
A feasible approach is to combine single robotic arm technology with capture net technology. While robotic arms provide stability and reliability, capture nets effectively address the limitations of traditional robotic capture methods. In this proposed method, a filament-based viscous and elastic network structure is integrated at the tip of the robotic arm. The capture process proceeds as follows:
• The satellite approaches the target debris, ensuring close proximity.
• The target debris makes contact with the viscous web structure, which gradually absorbs its angular momentum.
• Force sensors embedded within the robotic arm monitor the stress exerted by the filaments on the mechanical claw.
• Once the rotation speed of the debris falls below a predefined threshold, the mechanical claw closes, securing the target.
• The satellite then alters its orbit, directing the captured debris into a lower Earth orbit, where it undergoes atmospheric re-entry and burns up.
The advantage of this scheme is that it partially overcomes the challenges associated with using a robotic arm for space debris removal. By integrating the mesh structure with the target debris, the elastic filaments act as a buffer, reducing the impact force exerted on the satellite. Additionally, the elasticity of the network structure helps to decrease the tumbling motion of the target debris, making it easier to capture. These features suggest that the proposed scheme is highly feasible from a theoretical perspective.
4. Conclusion
To address the challenges associated with using a robotic arm to capture high-speed rotating space debris, this paper proposes a single robotic arm structure integrated with a resultant force sensor and capture net technology. This approach effectively mitigates the instantaneous impact at the moment of contact and facilitates target de-tumbling by utilizing the mesh structure for capture. The proposed method is expected to serve as a promising solution for high-speed space debris removal, enhancing the feasibility of using a single robotic arm for such missions.
References
[1]. Shan, M., J. Guo and E. Gill, Review and comparison of active space debris capturing and removal methods. Progress in Aerospace Sciences, 2016. 80: p. 18-32.
[2]. Leonard, R. and I.D. Williams, Viability of a circular economy for space debris. Waste Management, 2023. 155: p. 19-28.
[3]. Hall, L., The History of Space Debris, in Space Traffic Management Conference. 2014.
[4]. Habimana Sylvestre, V.R.R.P., Space debris: Reasons, types, impacts and management. India Journal of Radio&Space Physics, 2017. 46: p. 20-26.
[5]. Kessler, D.J. and B.G. Cour Palais, Collision frequency of artificial satellites: The creation of a debris belt. Journal of Geophysical Research, 1978. 83(A6): p. 2637-2646.
[6]. Map of Every Known Piece of Space Debris Orbiting Earth[EB/OL]. (15.0.3)[2024-09-22]. https://www.nicolaginzler.com/2013/05/19/map-of-every-known-piece-of-space-debris-orbiting-earth/
[7]. ESA. Space debris by the numbers[EB/OL]. (2023-05-20)[2025-01-13]. https://www.esa.int/Space_Safety/Space_Debris/Space_debris_by_the_numbers
[8]. Joseph A. Dailey, Samantha Connolly, Sanket Lokhande, Hao Xu, "Intelligent collaborative sensing for detection and removal of small distributed space debris, " Proc. SPIE 12546, Sensors and Systems for Space Applications XVI, 125460I (13 June 2023);
[9]. Mario Emanuele De Simonea, C.A.A.M., Proof of concept for a smart composite orbital debris detector. Acta Astronautica, 2019.
[10]. Castronuovo, M.M., Active space debris removal—A preliminary mission analysis and design. Acta Astronautica, 2011. 69(9-10): p. 848-859.
[11]. Dubanchet, V., Saussié, D., Alazard, D. et al. Modeling and control of a space robot for active debris removal. CEAS Space J 7, 203–218 (2015).
[12]. Montebugnoli, S., et al., The bistatic radar capabilities of the Medicina radiotelescopes in space debris detection and tracking. Advances in Space Research, 2010. 45(5): p. 676-682.
[13]. Zhengxin Song, Weidong Hu, Wenxian Yu, "Space debris environment monitoring fence: techniques and future directions, " Proc. SPIE 5985, International Conference on Space Information Technology, 59854Q (4 January 2006);
[14]. Liu, M., et al., Space Debris Detection and Positioning Technology Based on Multiple Star Trackers. Applied Sciences, 2022. 12(7): p. 3593.
[15]. Furumoto, M. and H. Sahara, Statistical assessment of detection of changes in space debris environment utilizing in-situ measurements. Acta Astronautica, 2020. 177: p. 666-672.
[16]. Kirchner, G., et al., Laser measurements to space debris from Graz SLR station. Advances in Space Research, 2013. 51(1): p. 21-24.
[17]. Zhang, W., et al., Review of On-Orbit Robotic Arm Active Debris Capture Removal Methods. Aerospace, 2023. 10(1): p. 13.
[18]. Orzechowski, M.A. and M.C.F. Bazzocchi, Multicriteria Analysis of Robotic End-Effectors for Grasping Space Debris, in 2023 Regional Student Conferences.
Cite this article
Liu,J. (2025). Research and Improvement of Space Debris Removal Using a Single Robotic Arm. Applied and Computational Engineering,125,161-167.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Shan, M., J. Guo and E. Gill, Review and comparison of active space debris capturing and removal methods. Progress in Aerospace Sciences, 2016. 80: p. 18-32.
[2]. Leonard, R. and I.D. Williams, Viability of a circular economy for space debris. Waste Management, 2023. 155: p. 19-28.
[3]. Hall, L., The History of Space Debris, in Space Traffic Management Conference. 2014.
[4]. Habimana Sylvestre, V.R.R.P., Space debris: Reasons, types, impacts and management. India Journal of Radio&Space Physics, 2017. 46: p. 20-26.
[5]. Kessler, D.J. and B.G. Cour Palais, Collision frequency of artificial satellites: The creation of a debris belt. Journal of Geophysical Research, 1978. 83(A6): p. 2637-2646.
[6]. Map of Every Known Piece of Space Debris Orbiting Earth[EB/OL]. (15.0.3)[2024-09-22]. https://www.nicolaginzler.com/2013/05/19/map-of-every-known-piece-of-space-debris-orbiting-earth/
[7]. ESA. Space debris by the numbers[EB/OL]. (2023-05-20)[2025-01-13]. https://www.esa.int/Space_Safety/Space_Debris/Space_debris_by_the_numbers
[8]. Joseph A. Dailey, Samantha Connolly, Sanket Lokhande, Hao Xu, "Intelligent collaborative sensing for detection and removal of small distributed space debris, " Proc. SPIE 12546, Sensors and Systems for Space Applications XVI, 125460I (13 June 2023);
[9]. Mario Emanuele De Simonea, C.A.A.M., Proof of concept for a smart composite orbital debris detector. Acta Astronautica, 2019.
[10]. Castronuovo, M.M., Active space debris removal—A preliminary mission analysis and design. Acta Astronautica, 2011. 69(9-10): p. 848-859.
[11]. Dubanchet, V., Saussié, D., Alazard, D. et al. Modeling and control of a space robot for active debris removal. CEAS Space J 7, 203–218 (2015).
[12]. Montebugnoli, S., et al., The bistatic radar capabilities of the Medicina radiotelescopes in space debris detection and tracking. Advances in Space Research, 2010. 45(5): p. 676-682.
[13]. Zhengxin Song, Weidong Hu, Wenxian Yu, "Space debris environment monitoring fence: techniques and future directions, " Proc. SPIE 5985, International Conference on Space Information Technology, 59854Q (4 January 2006);
[14]. Liu, M., et al., Space Debris Detection and Positioning Technology Based on Multiple Star Trackers. Applied Sciences, 2022. 12(7): p. 3593.
[15]. Furumoto, M. and H. Sahara, Statistical assessment of detection of changes in space debris environment utilizing in-situ measurements. Acta Astronautica, 2020. 177: p. 666-672.
[16]. Kirchner, G., et al., Laser measurements to space debris from Graz SLR station. Advances in Space Research, 2013. 51(1): p. 21-24.
[17]. Zhang, W., et al., Review of On-Orbit Robotic Arm Active Debris Capture Removal Methods. Aerospace, 2023. 10(1): p. 13.
[18]. Orzechowski, M.A. and M.C.F. Bazzocchi, Multicriteria Analysis of Robotic End-Effectors for Grasping Space Debris, in 2023 Regional Student Conferences.