






1. Introduction
The yields of various robots are always inspired by animals and plants. One of the significant areas is bioinspired robotics, which is created with the utilization of basic biological tenets converted to engineering design principles and acts like a natural system [1]. While the movements of animals are easy to observe and obtain, it is hard to imitate and evaluate these actions. The reason is that locomotion is an integration of many intricate elements such as the musculoskeletal system, the nervous system, and the environment [2]. It means that the difficulties of developing bioinspired robots could be approximately concluded as four aspects, which involve (i) extremely nonlinearity, (ii) high dimensionality, (iii) complicated interactions between multiple components, and (iv) various disciplines [2].
Specifically, there are three main challenges in improving bioinspired robots. First, bioinspired actions cannot be capacitated without sufficient component techniques. Advanced component techniques enable the outcome of newly designed materials. The material gets superior strength, flexibility, and stiffness, which makes it more likely to produce robots with further functionality. Second, the energy and actuation of robots require upgrades, since novel artificial muscles applied to bioinspired robotics lack efficiency, robustness, and power density. With no battery matched to the energy generation in organisms, largely miniaturized bioinspired robots driven by biological muscle turn superior. Moreover, it is challenging to combine the components efficiently and let the synthesis behave in system-standard. Though progress has been made in biology, manipulation, and mobility, there is still no system that matches the dexterity and flexibility of the human hand and integrates elements sufficiently. For further investigation, it is needed to comprehend multimodal movement and transition within a constant platform. It has been many explorations for advanced bioinspired robotics.
The continuum robot inspired by pangolin scales is able to realize the grasping of objects, while the robot enlightened by elephant trunks could explore narrow areas that are basically impossible for humans to reach. However, it is energy-consuming and unreachable to let them function with their relatively large volumes and terrible land conditions [3-5].
The soft-legged robots controlled by pneumatic circuits without electronics present high automaticity, which basically requires no human adjustment and is easy to put into practice. However, one robot is driven only by one pressurized \( C{O_{2}} \) canister, which limits its durability. It is also hard to take the machine out of the exploration site if it collapses [6].
The study mainly analyzed the materials used to construct robotic arms and the newly designed device to be added to the common continuum robot arms for better performance. The data of arms with or without the designed device were obtained by Ansys. The comparison between data could prove whether the design was a success. First, the idea of such a design was the result of an analysis of various former research. Then, software like SolidWorks made it possible to present the idea as a 3D model, which was inserted into Ansys for further mechanical analysis.
The inspiration for this design is the muscle hyperemia of elephant trunks, corresponding to the corrugated tube powered by a pressurized container. This design can not only maintain the capacity to explore narrow places but has the ability to handle some unexpected conditions.
2. Material and Method
The experiments of the design could be divided into 4 sections, which are low melting point alloy, material of the corrugated tubes, the \( C{O_{2}} \) container, and the illustration of the 3D model and possible scenes the arms might encounter. The equations used to prove whether the design is a success are also presented.
2.1. Low Melting Point Alloy of Continuum Robot
Low melting point alloy (LMPA) represents a class of alloys whose melting points range approximately from room temperature to 300 degrees Celsius [7]. LMPA presents great performance on deformation for crossing barriers, which also can resume its original shape and release strain energy. These characteristics make LMPA suitable for the construction of continuum robots. This is because continuum robots are built for complex conditions, which contain various space structures.
2.2. The Material of the Corrugated Tube
The material used to construct the corrugated tube is polyvinyl chloride. It is a material that has great performance in chemical stability, strength, electrical insulation, easy processing, and transparency [8]. It is appropriate to be used for the corrugated tube. Constructing grooves on a piece of polyvinyl chloride cylindrical is easy and has little influence on its mechanical performance. Besides, corrugated tubes will be operated for long-term use, polyvinyl chloride’s strength secures its durability.
2.3. The \( C{O_{2}} \) Container
The gas container is the power source in this design. Once the machine is trapped in circumstances like minimized space or sudden collapse, the gas container starts releasing gas through corrugated tubes. Corrugated tubes will be gradually expanded and become harder, which provides extra forces to help the machine’s operation. The \( C{O_{2}} \) container also makes it possible for further improvements like spectral detection with its spectral characteristic and heavier relative molecular mass than air.
2.4. Design Demonstration
The main section of this design is the corrugated tubes powered by the gas container for extra force. The extra forces help the machine operate under unexpected conditions. As shown in Fig 1, the model represents the common continuum robot arm, which contains transverse rod, longitudinal rod, and the connection parts mostly made from LMPA. There are copper wires inside the connection parts that generate heat for arm’s deformations [5].
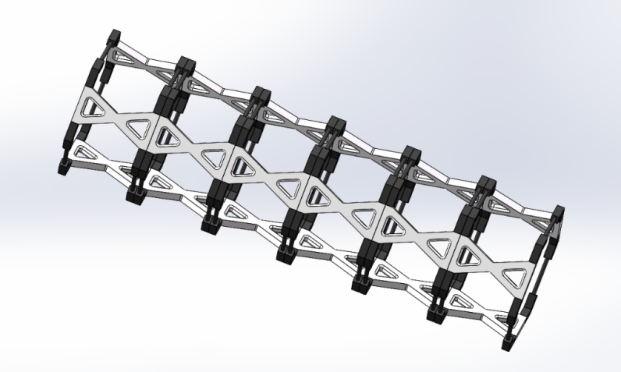
Figure 1: 3D model imitation of common continuum robot arm
The experiments on this kind of machine are basically a consistent barrier. The machine is controlled to cross the barrier. The experiments succeed if the arm can over the barrier and operates correctly on the other side of the barrier.
The structure of the new design adds eight corrugated tubes and one gas container as shown in Fig 2. It is a piece of a total arm. The transparent sections are the corrugated tubes, while the metallic luster section represents the \( C{O_{2}} \) container. The white component positioned at the middle of the structure is seen as a gaseous disk which is high airtightness and transports gas to eight tubes.
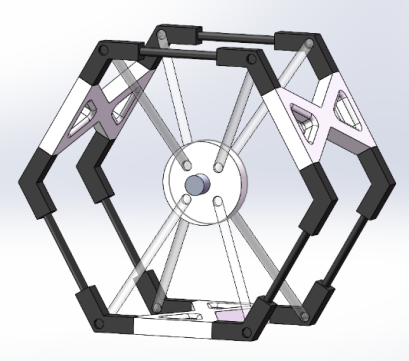
Figure 2: 3D model of one piece of new design.
With the addition of three components, it is possible to let the robot arm operate even if some sudden conditions appear. This is because the maximum load of one connection part made from LMPA is limited, which is about 50 grams horizontally and 200 grams vertically, respectively [5]. Below such loads can the arm mostly return to its original shape. It represents that the common arm may be disabled if unexpected incidents occur in the exploration area, which wastes the material and power source. The newly designed arm generates extra strength by providing gas for corrugated tubes. After the wires stop heating and LMPA becomes solid, the gas containers start releasing gas and generate forces to the total machine. Heat LMPA again and let it release strain energy, then the machine can gradually escape the incidental area or keep exploring. The total structure of the newly designed arm is shown in Fig 3.
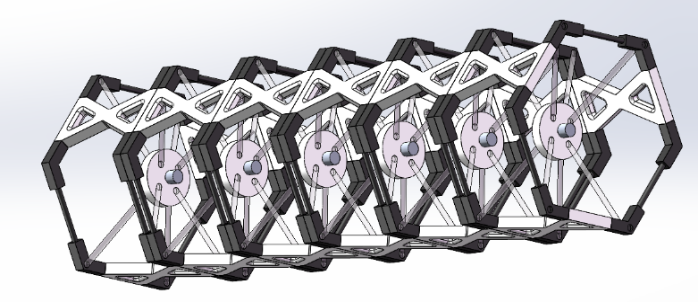
Figure 3: 3D model of newly designed arm’s total structure
The unexpected conditions are concluded as two types. One is the minimized space; the other is a sudden barrier caused by collapses as shown in Fig 4. The continuum robot arms are mostly used to explore narrow places like caves. It is common for the caves to collapse, which will cause the situations that some places become narrower, or different size-spalls fall. Both conditions have an adverse effect on the machine’s movement and the machine itself. Filled corrugated tubes help to solve this kind of issue by generating supporting forces.
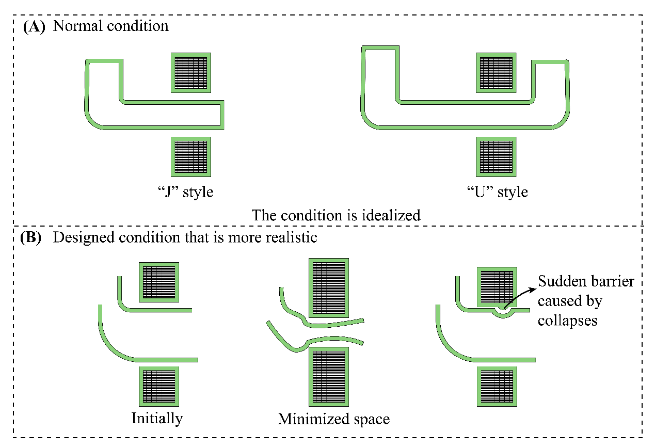
Figure 4: Different conditions of exploration. A) Arm’s movement styles under normal condition. B) More realistic conditions (Minimized space and sudden barrier).
The addition of extra forces can prove to be useful with the equations below.
\( {σ_{{x^{ \prime }}}}=\frac{{σ_{x}}{+σ_{y}}}{2}+\frac{{σ_{x}}{-σ_{y}}}{2}cos{(2θ)}+{τ_{xy}}sin(2θ) \) (1)
\( {σ_{{y^{ \prime }}}}=\frac{{σ_{x}}{+σ_{y}}}{2}-\frac{{σ_{x}}{-σ_{y}}}{2}cos{(2θ)}-{τ_{xy}}sin(2θ) \) (2)
\( {τ_{{x^{ \prime }}{y^{ \prime }}}}=-\frac{{σ_{x}}{-σ_{y}}}{2}sin{(2θ)}+{τ_{xy}}cos(2θ) \) (3)
\( σ=Eε \) (4)
\( {σ_{x}} \) and \( {σ_{y}} \) represent the normal stresses along x-axis and y axis. \( {τ_{xy}} \) and \( {τ_{x \prime y \prime }} \) represent the shear stresses. \( θ \) represents the angle of inclination of the object, which is seen as a square differential unit for convenient calculations and simulations. \( ε \) represents the strain, while \( E \) represents Young’s modulus.
3. Result
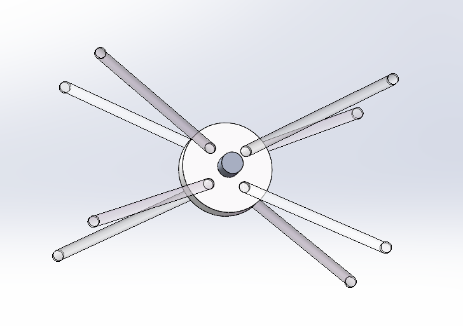
Figure 5: 3D model of newly designed arm’s additional sections.
The core section of this design is shown in Fig 5, which contains eight corrugated tubes, one gaseous disk, and one gas container. It helps the continuum robot arm escape or keep exploring by filling corrugated tubes. Filled corrugated tubes maintain higher toughness, which enables tubes to generate supporting forces.
The utilization of Ansys makes it possible to prove whether the design is useful and how useful it could be. Figures 6-9 illustrate the comparisons between the common continuum robot arm and the newly designed arm on longitudinal deformation and perpendicular strain.
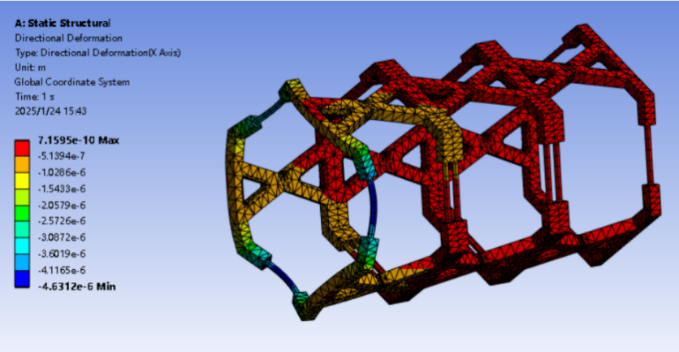
Figure 6: Longitudinal deformation of common continuum robot arm
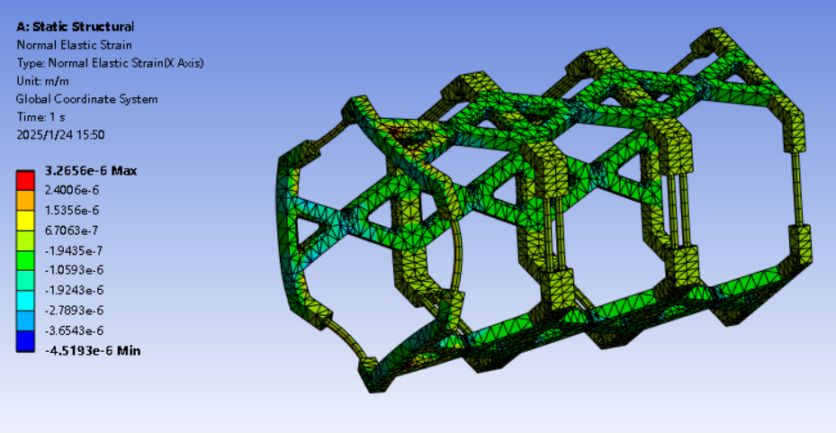
Figure 7: Normal strain of common continuum robot arm
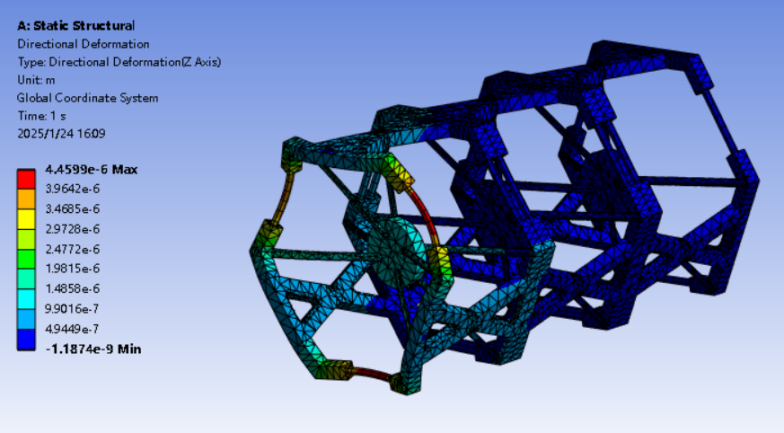
Figure 8: Longitudinal deformation of newly designed continuum robot arm
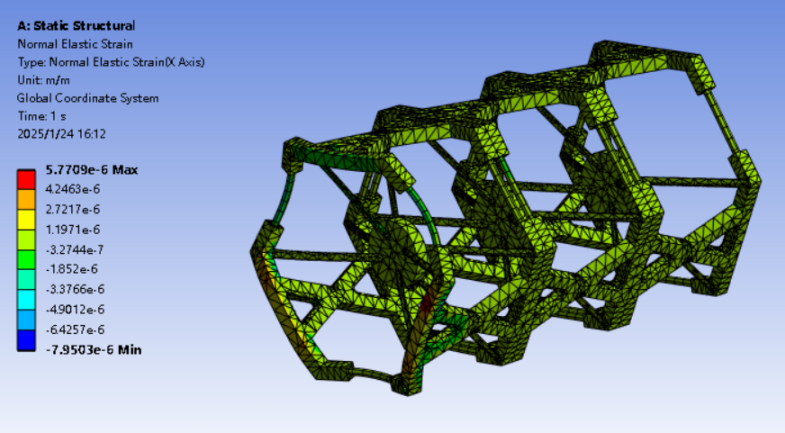
Figure 9: Normal strain of newly designed continuum robot arm
It is clear that both the longitudinal deformation and normal strain of the newly designed arm are smaller than the two data of the common robot arm. These analyses are generated as Static Structural and load is constant as 500 Newton. According to the equations, it can be proved that the new design performs larger Young’s modulus. Moreover, additional forces increase the angle between the longitudinal rod and the axis perpendicular to the longitudinal rod, which also provides a wider range of stresses.
4. Conclusion
This design is inspired by the existing continuum robots and soft-legged robots. Existing common robots could solve some practical problems and have been tested to complete the movements in ‘J’ and ‘U’ style barriers. Soft-legged robots realized how to motivate the robots by filling gas into the corrugated tubes, which were treated as the legs of robots. The frame of the design is mostly made from LMPA, while the corrugated tubes use polyvinyl chloride. However, common robots are too large in size and require a steady power source, which makes them hard to be put into practical applications. Soft-legged robots are convenient to operate by one gas container and require basically no human adjustment. However, its life period is too short to be used for real explorations. The robots may run out of gas before finishing explorations or returning to their original positions. This design was come up with for combining two robot’s advantages. The new design adds corrugated tubes powered by a gas container to generate supporting forces, which makes machines able to solve sudden conditions like minimized space and sudden barriers. The result meets the expectation that the design presents better performance on strength and other mechanical properties, which proves that the tubes filled with gas indeed have the ability to provide extra forces and help the machine escape or keep exploring under unexpected conditions. With the feature of \( C{O_{2}} \) , it is possible to add trajectory recording and detection functions with an infrared spectrometer. Because \( C{O_{2}} \) presents strong absorption characteristics at infrared light with a specific wavelength, and has heavier relative molecular mass compared to air, which makes it easier to be detected.
The study mainly considered the mechanical improvements by the addition of one device. It is possible to improve the performance of the continuum robot arms by attempting various materials for different sections of the arms. Moreover, low melting point alloys have different component combinations, such as Fe-Mn-Si ally and Cu-AL-Ni alloy, which could be applied to different exploration sites for their unique performances. Further research based on this design could focus on the material replacements of workpieces and low melting point alloys, and the precise detection of \( C{O_{2}} \) or other gases that present sensitive responses to specific detectors.
References
[1]. Guang-Zhong Yang et al., The grand challenges of Science Robotics. Sci. Robot.3, eaar7650 (2018). DOI: 10.1126/scirobotics.aar7650
[2]. Ijspeert, A. J. (2014). Biorobotics: Using robots to emulate and investigate agile locomotion. Science (American Association for the Advancement of Science), 346(6206), 196–203. https://doi.org/10.1126/science.1254486
[3]. K. Ma, X. Chen, J. Zhang, Z. Xie, J. Wu and J. Zhang, "Inspired by Physical Intelligence of an Elephant Trunk: Biomimetic Soft Robot With Pre-Programmable Localized Stiffness," in IEEE Robotics and Automation Letters, vol. 8, no. 5, pp. 2898-2905, May 2023, doi: 10.1109/LRA.2023.3256922.
[4]. Zhang, J., Wang, B., Chen, H., Bai, J., Wu, Z., Liu, J., Peng, H., & Wu, J. (2023). Bioinspired Continuum Robots with Programmable Stiffness by Harnessing Phase Change Materials. Advanced Materials Technologies, 8(6). https://doi.org/10.1002/admt.202201616
[5]. Sun, T., Chen, Y., Han, T., Jiao, C., Lian, B., & Song, Y. (2020). A soft gripper with variable stiffness inspired by pangolin scales, toothed pneumatic actuator and autonomous controller. Robotics and Computer-Integrated Manufacturing, 61, 101848-. https://doi.org/10.1016/j.rcim.2019.101848
[6]. Drotman, D., Jadhav, S., Sharp, D.J., Chan, C., & Tolley, M.T. (2021). Electronics-free pneumatic circuits for controlling soft-legged robots. Science Robotics, 6.
[7]. Hao, Y., Gao, J., Lv, Y., & Liu, J. (2022). Low Melting Point Alloys Enabled Stiffness Tunable Advanced Materials. Advanced Functional Materials, 32(25). https://doi.org/10.1002/adfm.202201942
[8]. Mindivan, F., Göktaş, M., & Dike, A. S. (2020). Mechanical, thermal, and micro‐ and nanostructural properties of polyvinyl chloride/graphene nanoplatelets nanocomposites. Polymer Composites, 41(9), 3707–3716. https://doi.org/10.1002/pc.25669
Cite this article
Yang,Y. (2025). Bioinspired Continuum Robot's Corrugated Tube Serving as Impeller and Recorder. Applied and Computational Engineering,142,40-46.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of MSS 2025 Symposium: Automation and Smart Technologies in Petroleum Engineering
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Guang-Zhong Yang et al., The grand challenges of Science Robotics. Sci. Robot.3, eaar7650 (2018). DOI: 10.1126/scirobotics.aar7650
[2]. Ijspeert, A. J. (2014). Biorobotics: Using robots to emulate and investigate agile locomotion. Science (American Association for the Advancement of Science), 346(6206), 196–203. https://doi.org/10.1126/science.1254486
[3]. K. Ma, X. Chen, J. Zhang, Z. Xie, J. Wu and J. Zhang, "Inspired by Physical Intelligence of an Elephant Trunk: Biomimetic Soft Robot With Pre-Programmable Localized Stiffness," in IEEE Robotics and Automation Letters, vol. 8, no. 5, pp. 2898-2905, May 2023, doi: 10.1109/LRA.2023.3256922.
[4]. Zhang, J., Wang, B., Chen, H., Bai, J., Wu, Z., Liu, J., Peng, H., & Wu, J. (2023). Bioinspired Continuum Robots with Programmable Stiffness by Harnessing Phase Change Materials. Advanced Materials Technologies, 8(6). https://doi.org/10.1002/admt.202201616
[5]. Sun, T., Chen, Y., Han, T., Jiao, C., Lian, B., & Song, Y. (2020). A soft gripper with variable stiffness inspired by pangolin scales, toothed pneumatic actuator and autonomous controller. Robotics and Computer-Integrated Manufacturing, 61, 101848-. https://doi.org/10.1016/j.rcim.2019.101848
[6]. Drotman, D., Jadhav, S., Sharp, D.J., Chan, C., & Tolley, M.T. (2021). Electronics-free pneumatic circuits for controlling soft-legged robots. Science Robotics, 6.
[7]. Hao, Y., Gao, J., Lv, Y., & Liu, J. (2022). Low Melting Point Alloys Enabled Stiffness Tunable Advanced Materials. Advanced Functional Materials, 32(25). https://doi.org/10.1002/adfm.202201942
[8]. Mindivan, F., Göktaş, M., & Dike, A. S. (2020). Mechanical, thermal, and micro‐ and nanostructural properties of polyvinyl chloride/graphene nanoplatelets nanocomposites. Polymer Composites, 41(9), 3707–3716. https://doi.org/10.1002/pc.25669