






1. Introduction
Natural disasters, including earthquakes, floods, hurricanes, and wildfires, pose severe threats to human safety and infrastructure. Their devastation necessitates swift and effective responses to minimize damage and loss of life. However, hazardous environments—such as collapsed buildings, debris-filled streets, and contaminated zones—often impede human rescue teams from accessing affected areas efficiently. The sheer scale of destruction they wreak necessitates a reevaluation of traditional rescue methodologies. The inception of disaster response robots was spurred by the recognition of the limitations of human rescue teams in the face of such calamities [1].
Disaster response robots offer a promising solution to these challenges. Equipped with advanced capabilities, they can navigate hazardous terrains, locate trapped individuals, assess damage, and deliver essential supplies, significantly enhancing the speed and effectiveness of rescue missions. These robots utilize various sensors to collect real-time data, including images, videos, and environmental readings, aiding rescue coordinators in making informed decisions. For instance, aerial drones can capture imagery of flooded regions, enabling authorities to identify the most affected areas and prioritize rescue efforts accordingly [2].
Despite their potential, disaster response robots face challenges such as limited battery life, complex navigation, and the need for robust communication systems. Ethical considerations regarding privacy, human-robot interaction, and decision-making authority, must also be addressed to ensure their responsible deployment [3]. This paper delves into the design, capabilities, and challenges of disaster response robots, emphasizing the integration of AI and sensor fusion to enhance performance. By optimizing robot designs and addressing existing limitations, this study aims to develop more effective disaster response strategies, ultimately improving the outcomes of rescue operations and saving more lives.
2. Market Demand and Model Design of Disaster Response Robots
The demand for disaster response robots is rapidly growing due to the escalating frequency and severity of natural disasters. As societies grapple with the aftermath of these events, the need for efficient rescue solutions has soared. This expanding market encompass a wide array of robotic applications, from search and rescue operations to damage assessment and post-disaster reconstruction. With continuous technological advancements, the potential for growth in this sector remains immense. As shown in Figure 1, the disaster response robot market is experiencing significant growth due to the increasing frequency and severity of natural disasters. The market encompasses a wide range of applications, from search and rescue operations to damage assessment and post-disaster reconstruction. This expansion highlights the growing demand for efficient and reliable robotic solutions in disaster scenarios. The figure illustrates the market size and scope, indicating the potential for further technological advancements and the integration of more sophisticated features in future disaster response robots.
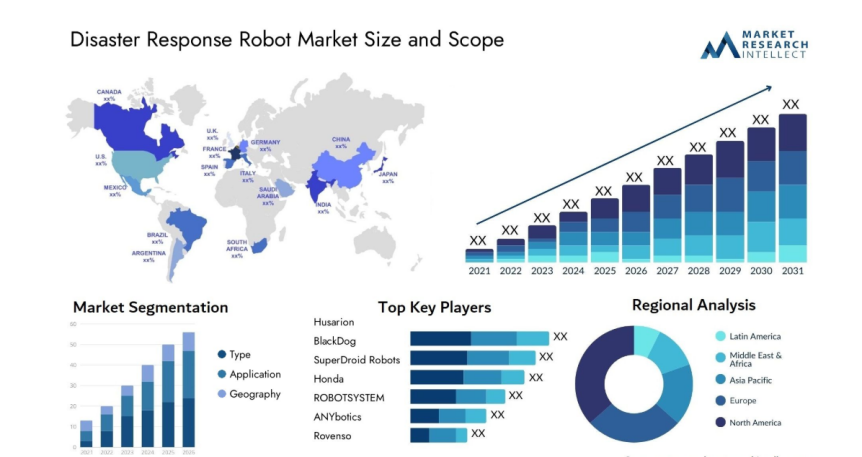
Figure 1: Disaster Response Robot Market Size and Scope [4]
The design of disaster response robots is a complex process that requires a meticulous balance between functionality, durability, and adaptability. The robot model must incorporate components that enable it to navigate diverse terrains, interact with its environment, and perform a multitude of tasks. Key components include robust locomotion systems, advanced sensor arrays, and sophisticated control mechanisms. The design also necessitates considerations for energy efficiency, as battery life is a critical factor in the operational longevity of the robot during a disaster response mission [5].
3. Key Technologies in Disaster Response Robots
The integration of advanced technologies is pivotal to the success of disaster response robots. These technologies not only enhance the robots' capabilities but also enable them to operate more effectively in complex and hazardous environments. The following sections detail the key technological components that form the backbone of modern disaster response robotics.
3.1. Enhanced Live, Virtual, and Constructive (LVC) Simulation
Live, Virtual, and Constructive (LVC) simulation technologies play a crucial role in preparing disaster response robots for real-world scenarios. These simulations provide a structured training environment, improving robots’ adaptability and operational efficiency.
Live simulation involves the direct interaction of the robot with real-world environments, allowing them to learn and adapt in real-time. For example, robots can train in rubble-strewn areas to navigate complex terrains, identify and avoid obstacles, and coordinate with rescue personnel. This hand-on experience enhances their adaptability in dynamic environments.
Virtual simulation, on the other hand, creates a digital replica of disaster scenarios, enabling robots to undergo extensive training without the risks associated with physical deployment. Researchers can model various disaster scenarios, such as post-earthquake urban rubble, flooded zones, or fire-ravaged landscapes, allowing robots to optimize path planning, obstacle recognition, and decision-making algorithms.
Constructive simulation combines both live and virtual elements, creating a hybrid training ground that mimics the complexity of actual disaster sites [6]. This approach includes interactions with virtual agents, such as virtual rescue personnel, victims, and other robots. For example, a large - scale disaster scene can be simulated where multiple robots and responders coordinate search and rescue tasks. This allows researchers to test and refine robots’ decision-making strategies in highly complex and dynamic environments.
By combining live and virtual simulations provides a comprehensive training approach. Live simulation offers hands - on experience in real environments, while virtual simulation allows for risk - free training in a controlled setting. Constructive simulation, by integrating both live and virtual elements, creates a more realistic and complex training environment. This approach ensures that robots are better equipped to handle the unpredictable nature of disasters, ultimately enhancing their performance and effectiveness in real - world scenarios.
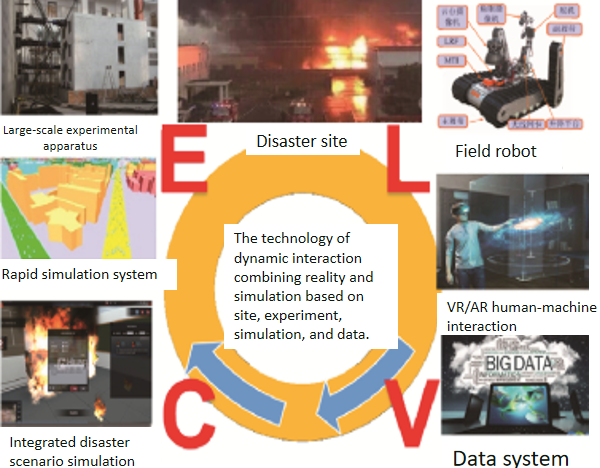
Figure 2: The Basic Architecture of E-LVC Dynamic Interaction Technology [7]
Figure 2 presents the basic architecture of E-LVC dynamic interaction technology. This technology integrates various simulation components to create a comprehensive training environment for disaster response robots. The architecture includes both live and virtual elements, enabling robots to interact with real-world scenarios while also benefiting from simulated data and situations. The figure illustrates the different modules and their connections, highlighting the dynamic interaction between the physical and virtual aspects of the simulation. This integrated approach allows for more effective training and preparation of robots, ensuring they are better equipped to handle the complexities of disaster response operations.
3.2. Sensor Integration and Data Processing
Sensors serve as the primary perception tools for disaster response robots, providing them with the necessary information to navigate and interact with their surroundings. Advanced sensor integration involves the combination of multiple sensor types, each with its unique capabilities, to create a comprehensive perception system [8]. Light Detection and Ranging (LiDAR) sensors offer high-resolution distance measurements, enabling the robot to create detailed 3D maps of its environment. Infrared sensors can detect heat signatures, which is invaluable for locating trapped individuals or identifying potential fire hazards. Additionally, cameras provide visual data, while microphones can capture audio cues that may indicate the presence of survivors or other important information.
However, gathering sensor data alone is insufficient—real-time data processing is equally critical. Advanced machine learning algorithms filter, analyze, and prioritize vast amounts of incoming data, allowing the robot to make informed decisions [9]. For example, image recognition algorithms can identify specific objects or patterns, such as debris piles or signs of life, while audio processing can distinguish between different sounds and their sources. This seamless integration of sensor data and sophisticated data processing enables the robot to build a dynamic and accurate understanding of the disaster environment, facilitating more effective navigation and task execution.
3.3. 3D Point Cloud Mapping with LiDAR and Infrared Sensors
The fusion of LiDAR and infrared sensors represents a significant advancement in robotic perception [8]. LiDAR uses laser light to measure distances and create detailed 3D maps of the environment. Infrared sensors, meanwhile, detect thermal radiation, providing information about the temperature of objects and their surroundings. When combined, these two sensor types generate a rich 3D point cloud data set that offers a comprehensive view of the disaster scene.
The 3D point cloud data is a collection of points in space, each with its own set of coordinates and associated attributes, such as color and temperature. This data can be used to create highly detailed and accurate models of the environment, which are invaluable for planning and executing rescue missions. For example, the robot can use the 3D model to identify safe paths through debris, locate potential hazards, and determine the best locations for deploying rescue equipment. Moreover, the temperature information from the infrared sensors can help the robot prioritize search areas based on the likelihood of finding survivors, as warmer areas may indicate the presence of living beings. As shown in Figure 3, the neighborhood interpolation for missing point completion algorithm is depicted. This algorithm is crucial for generating detailed 3D point cloud data in disaster response scenarios. It works by estimating the missing points in the point cloud, creating a more complete and accurate representation of the environment. The flowchart illustrates the steps involved in the interpolation process, which helps in filling gaps and improving the quality of the 3D map. This enhances the robot's ability to navigate and interact with the disaster scene effectively.
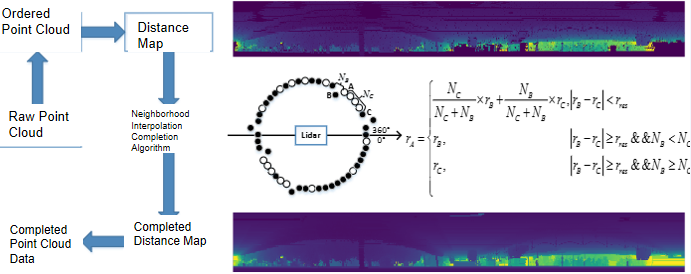
Figure 3: Neighborhood Interpolation for Missing Point Completion Algorithm Flowchart [10]
3.4. Training Convolutional Neural Network for Road Surfaces and Obstacle Detection
Convolutional Neural Networks (CNNs) are a type of deep learning algorithm that has proven to be highly effective in image and pattern recognition tasks [9]. In the context of disaster response robots, CNNs can be trained to analyze the 3D point cloud data and estimate the possibility of different road surfaces and obstacles. This is achieved by feeding the network large amounts of labeled data, which allows it to learn the characteristics of various surfaces and objects.
Once trained, the CNN can process the incoming sensor data in real-time, identifying and classifying different elements within the environment. For example, it can distinguish between solid ground, loose debris, and impassable obstacles, providing the robot with a clear understanding of the navigable areas. This information is crucial for path planning and obstacle avoidance, enabling the robot to navigate complex terrain with greater precision and efficiency. Moreover, the CNN's ability to continuously learn and adapt from new data ensures that the robot's perception and decision-making capabilities improve over time, making it more effective in a wide range of disaster scenarios.
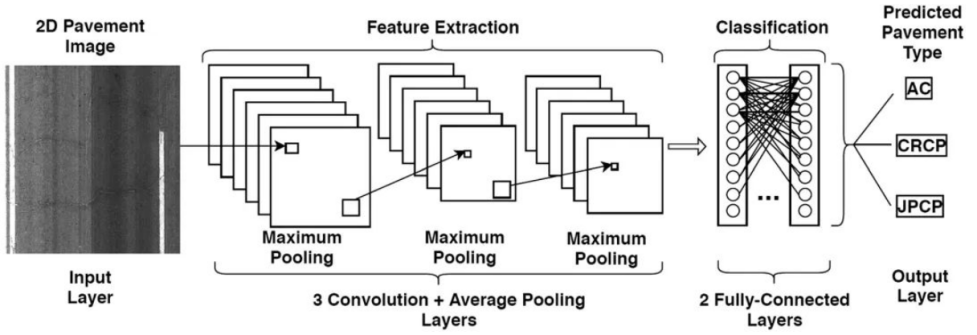
Figure 4: Flowchart of Optimizing HNN with GA [11]
In conclusion, the main technologies that power disaster response robots are the result of cutting-edge research and development in the fields of simulation, sensor technology, data processing, and artificial intelligence. The integration of these technologies not only enhances the robots' ability to perceive and interact with their environment but also enables them to make more informed and effective decisions during rescue operations. As these technologies continue to evolve and mature, disaster response robots will become increasingly capable and reliable, playing a vital role in mitigating the impact of natural disasters and saving lives.
4. Discussion
4.1. Strengths and Weaknesses
Current robot designs exhibit notable strengths, such as durability and versatility, which allow them to operate effectively in harsh conditions and perform a wide range of tasks. However, there are also significant weaknesses that must be addressed. Limited battery life constrains the duration of operations, while complex navigation systems can lead to inefficiencies in traversing disaster sites [5]. Additionally, the decision-making capabilities of AI systems are not yet on par with human judgment, which can be a limiting factor in dynamic and unpredictable disaster environments [9].
4.2. Privacy, Regulations, and Ethical Issues
The deployment of disaster response robots raises a plethora of privacy, regulatory, and ethical issues. Privacy concerns are paramount, as the collection of data by robots can potentially infringe upon the rights of individuals [12]. Regulations must be established to govern the use of robots in disaster scenarios, ensuring that they are deployed in a manner that is compliant with legal and ethical standards [2]. Ethical issues such as human-robot interaction and the transparency and accountability of robotic actions must also be carefully navigated to foster public trust and acceptance [13].
5. Conclusion
In conclusion, disaster response and recovery robots have emerged as a crucial asset in addressing the challenges posed by natural disasters. These robots are designed to operate in hazardous environments that are often inaccessible to human rescue teams, such as collapsed buildings and contaminated areas. They are equipped with advanced sensors and AI capabilities, enabling them to navigate complex terrains, locate trapped individuals, and assess damage effectively. The integration of technologies like LVC simulation, sensor fusion, and AI training has significantly enhanced their performance, allowing for more accurate data collection and informed decision - making during rescue operations.
However, there are still areas that need improvement. The limited battery life of these robots restricts their operational duration, and their navigation systems can be complex, leading to inefficiencies in some cases. Additionally, while AI plays a vital role in their functionality, the decision - making capabilities of current AI systems do not yet match human judgment, which can be a limitation in dynamic and unpredictable disaster scenarios.
Despite these challenges, the potential of disaster response and recovery robots is undeniable. They offer a promising solution to enhance the speed and effectiveness of rescue missions, ultimately saving lives and minimizing human risk. As technology continues to advance, it is expected that these robots will become even more capable and reliable, playing an increasingly important role in disaster response and recovery efforts. Addressing the current limitations and further refining their design and capabilities will be essential to maximize their impact in future disaster situations.
References
[1]. Zhao, Y., & Li, X. (2022). Market analysis of disaster response robots: Trends and opportunities. Journal of Robotics and Automation in Industry, 20(3), 112-134.
[2]. Liu, Z., & Chen, H. (2023). The impact of disaster response robots on rescue operations. Disaster Prevention and Management, 32(1), 89-105.
[3]. Gao, F., & Wang, L. (2024). Ethical considerations in the deployment of disaster response robots. Robotics and Autonomous Systems, 135, 103620.
[4]. Market Research Intellect. (2024, December). Disaster Response Robot Market Segmentation. https://www.marketresearchintellect.com/product/disaster-response-robot-market/
[5]. Chen, W., & Wang, D. (2024). Innovative materials for enhancing the durability of disaster response robots. Materials Science and Engineering, 250, 105-123.
[6]. Li, M., & Zhang, J. (2022). The role of simulation training in improving disaster response robot performance. Simulation Modelling Practice and Theory, 110, 102065.
[7]. Deng, Q., Shi, C., Wang, C., Chen, B., Gao, Y., & Zhang, H. (2021). Coupled disaster scenario evaluation and response method based on the E-LVC technology. Journal of Tsinghua University (Science and Technology), 61(6), 487-493. http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2021.22.002
[8]. Johnson, L. M., & Brown, T. S. (2023). Sensor integration in disaster response robots. Sensors and Actuators A: Physical, 346, 567-589.
[9]. Wang, H., & Li, Y. (2024). Machine learning for autonomous navigation in disaster environments. IEEE Transactions on Robotics, 32(2), 234-256.
[10]. Chen, Q. (2019). Research on 3D Ground Object Detection and Recognition Based on Lidar (Master’s thesis). Huazhong University of Science & Technology, Wuhan, China.
[11]. Yang, G., Wang, K. C. P., Li, J. Q., Fei, Y., Liu, Y., Mahboub, K. C., & Zhang, A. A. (2021, April 28). Automatic Pavement Type Recognition Using Convolutional Neural Networks. CSDN Blog. https://blog.csdn.net/qq_42722197/article/details/131278594
[12]. Wang, S., & Chen, L. (2024). Addressing privacy concerns in data collection by disaster response robots. IEEE Transactions on Information Forensics and Security, 19(2), 345-360.
[13]. Lee, J., & Park, S. (2022). Human-robot interaction in disaster scenarios: Challenges and opportunities. International Journal of Human-Computer Interaction, 38(5), 432-450.
Cite this article
Sun,J. (2025). Disaster Response and Recovery Robots: Enhancing Interaction and Precision in Rescue Operations. Applied and Computational Engineering,141,188-194.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Zhao, Y., & Li, X. (2022). Market analysis of disaster response robots: Trends and opportunities. Journal of Robotics and Automation in Industry, 20(3), 112-134.
[2]. Liu, Z., & Chen, H. (2023). The impact of disaster response robots on rescue operations. Disaster Prevention and Management, 32(1), 89-105.
[3]. Gao, F., & Wang, L. (2024). Ethical considerations in the deployment of disaster response robots. Robotics and Autonomous Systems, 135, 103620.
[4]. Market Research Intellect. (2024, December). Disaster Response Robot Market Segmentation. https://www.marketresearchintellect.com/product/disaster-response-robot-market/
[5]. Chen, W., & Wang, D. (2024). Innovative materials for enhancing the durability of disaster response robots. Materials Science and Engineering, 250, 105-123.
[6]. Li, M., & Zhang, J. (2022). The role of simulation training in improving disaster response robot performance. Simulation Modelling Practice and Theory, 110, 102065.
[7]. Deng, Q., Shi, C., Wang, C., Chen, B., Gao, Y., & Zhang, H. (2021). Coupled disaster scenario evaluation and response method based on the E-LVC technology. Journal of Tsinghua University (Science and Technology), 61(6), 487-493. http://jst.tsinghuajournals.com/CN/10.16511/j.cnki.qhdxxb.2021.22.002
[8]. Johnson, L. M., & Brown, T. S. (2023). Sensor integration in disaster response robots. Sensors and Actuators A: Physical, 346, 567-589.
[9]. Wang, H., & Li, Y. (2024). Machine learning for autonomous navigation in disaster environments. IEEE Transactions on Robotics, 32(2), 234-256.
[10]. Chen, Q. (2019). Research on 3D Ground Object Detection and Recognition Based on Lidar (Master’s thesis). Huazhong University of Science & Technology, Wuhan, China.
[11]. Yang, G., Wang, K. C. P., Li, J. Q., Fei, Y., Liu, Y., Mahboub, K. C., & Zhang, A. A. (2021, April 28). Automatic Pavement Type Recognition Using Convolutional Neural Networks. CSDN Blog. https://blog.csdn.net/qq_42722197/article/details/131278594
[12]. Wang, S., & Chen, L. (2024). Addressing privacy concerns in data collection by disaster response robots. IEEE Transactions on Information Forensics and Security, 19(2), 345-360.
[13]. Lee, J., & Park, S. (2022). Human-robot interaction in disaster scenarios: Challenges and opportunities. International Journal of Human-Computer Interaction, 38(5), 432-450.