







1. Introduction
Nowadays, in the context of the gradual increase in labor costs, the change of industrial intelligence centered on intelligent manufacturing is developing rapidly. Industrial robots, as the cornerstone of intelligent manufacturing, are widely used in many industries and gradually reshape the industrial production model, playing a pivotal role in the industrial field and creating great wealth for mankind [1-3].
The application of single robotic arm in industrial production has been quite common, especially in those simple and repetitive operations, such as welding, spraying and material handling, etc., they rely on its simple structure, low cost advantages, has become the right-hand man on the production line [4]. However, as the technical requirements continue to improve, especially in assembly operations, rescue and emergency rescue, medical services and other fields with higher requirements for precision and complexity, the limitations of single-arm robots begin to appear. In these fields, the coordination and flexibility of two single-arm robots working together show advantages that single-arm robots cannot match.
In most cases where robotic arms are used in existing industries, they are single-armed stationary models that perform a series of repetitive tasks through a preset program. These types of robots do have their advantages, such as lower cost and the ability to fulfill basic production needs [5]. However, they can only perform a limited number of repetitive tasks, and most of the robotic arms only have three to four degrees of freedom, which makes it difficult for them to cope with tasks that require a higher degree of precision and manipulation difficulty.
In contrast, dual robotic arms are much better at handling complex tasks. They are capable of performing tasks that require greater precision, such as delicate parts assembly and precise welding of workpieces. The introduction of dual robotic arms not only improves work efficiency, but also increases production flexibility, allowing the production line to adapt more flexibly to different production needs. Dual robotic arms operate similarly to human arms, and this human- like operating ability enables them to excel in diverse tasks, such as operating machining targets in an orderly manner, thus increasing production efficiency [6].
In addition, dual robotic arms show unique advantages in cognitively motivated tasks. Their humanoid design is not only suitable for performing physical manipulation tasks, but also capable of performing cognitive recognition tasks involving reasoning. In contexts related to human-computer interaction, the fact that humans are naturally endowed with an understanding of two- handed manipulation makes bi-mechanical arms more accessible and maneuverable by the operator. For example, when performing household tasks such as dishwashing, a bi-mechanical arm is able to utilize the highly redundant nature of its task space to flexibly perform various operations [7, 8]. As a result, a higher level of operational functionality and a wider range of applications can be realized.
Dual robotic arm has an extensive range of application areas, such as:
(1) Medical field: with its precision and flexibility, dual robotic arms have become indispensable auxiliary equipment in medical surgery and rehabilitation. They can autonomously complete minimally invasive surgery, accurate sample collection, centrifugation, and other difficult operations, thus reducing the degree of dependence on physicians. In rehabilitation, intelligent wheelchairs equipped with dual robotic arms help patients deal with basic daily affairs, significantly reducing the pressure on care workers.
(2) Industrial field: the automation process in the industrial field, the application of dual robotic arms is particularly prominent. They are capable of complex processing tasks, such as fine assembly, heavy lifting, and precise grinding work. In large logistics warehouses, dual robotic arms can efficiently complete the disassembly, sorting and handling of goods, improving logistics efficiency.
(3) Aviation field: the application of dual robotic arms has reached a new height. They are not only able to perform spacecraft load operation and space station module table detection, but also can assist astronauts in extravehicular activities, with very high safety and reliability. Space dual- arm robots can also complete on-orbit maintenance, strategic interference, fuel refueling and other tasks, providing strong support for human space exploration.
(4) Service field: the development of the service field has also witnessed the wide application of dual robotic arms. With the continuous pursuit of people's quality of life, industrial robots are gradually stepping into the family field and showing a trend of evolution towards humanization. Their ability to perform basic daily operations helps to alleviate the challenges posed by an aging population and improves the convenience of daily life at home.
(5) In the field of disaster relief: the role of dual robotic arms should not be underestimated. In the “12-20” particularly significant landslide accident and other disaster sites, the application of dual robotic arms has greatly improved the rescue efficiency. They have the ability to perform multiple tasks, such as cutting, expanding, grasping, etc., at the same time, which has won valuable time for rescue operations.
In summary, the study of coordinated control of dual robotic arms has significant application value and far-reaching impact in many fields. This research not only promotes the advancement of robotics, but also provides efficient solution strategies for different industries. Nevertheless, the coordinated control of dual robotic arms still encounters a number of challenges, and its operation task modes can be broadly categorized into two types: tight coordination and loose coordination. In loose coordination mode, each robotic arm can complete its own task independently, while in tight coordination mode, a higher level of coordinated operation is required, such as synchronized pouring of water or joint handling of heavy objects.
The key technologies for coordinated control of dual robotic arms cover both path planning and force control. The performance of these two technologies directly affects whether the dual robotic arms can accomplish the given tasks without any obstacles, and they are important criteria for evaluating the effectiveness of coordinated control. Therefore, the research on the coordinated control of dual robotic arms will undoubtedly attract extensive attention of artificial intelligence and become a focal point of technological progress.
As the applications of dual robotic arms continue to expand, the research on their related technologies has been increasingly emphasized by experts and scholars. Nevertheless, the coordinated operation of dual robotic arms has certain limitations, and a complete systematic theoretical system has not yet been formed, which, to a certain extent, restricts the application of dual-arm robots in a wider range of fields.
Motivation:
The purpose is to deeply explore the practical application effect of dual robotic arm cooperative operation in the field of heavy load handling, with a view to significantly improving the handling efficiency through this innovative handling method. Specifically, the research team will analyze how the main and auxiliary robotic arms in the dual robotic arm system interact and cooperate with each other so as to ensure the stability and safety of the heavy loads in the whole handling process. In addition, the group will optimize the motion control strategy of the robotic arms to achieve precise positioning and smooth rotation of the heavy loads during the handling process so as to reduce operating errors and improve the quality of operation.
To ensure the practicality and popularization value of the research results, the team will verify the feasibility and reliability of the dual robotic arm system in the actual working environment. Through a series of experiments and simulations, the team expects to provide solid technical support for similar heavy load-handling scenarios. Ultimately, this research will contribute an efficient and stable handling method to the field of heavy load handling, which can not only improve the efficiency and safety of handling operations, but also promote the innovation and development of handling technology, and bring long-term economic and social benefits to related industries.
At this stage, the single robotic arm is still being used in most of the cases in the field of handling heavy loads rather than dual robotic arms. In the article titled Pick and Place Robotic Arm: A Review Paper in IRJET Journal 2021 [9], different types of robotic arms are listed, including Cartesian, Cylindrical, Spherical, SCARA, and Humanoid type robotic arms. These robotic arms are used in a variety of applications ranging from welding and die casting to precision assembly, but these are single robotic arms rather than dual robotic arms. In another paper [10] in 2021, it is also pointed out that handling heavy objects is mainly controlled by the AI of a robotic arm. In this case, this experimental group intends to try a new approach: the synergy of two robotic arms to improve the efficiency of handling heavy objects.
2. Proposed Approach
2.1. Problem Statement
After studying the previous work, the researcher found that in the field of handling heavy loads, dual robotic arms are used less, and mainly single robotic arms are used. The researcher also found that in the field of handling heavy loads, there is a danger of the base shaking and heavy loads falling from the base, the aim of this research is to solve the problem of unstable base by using dual robotic arms and fixing the base.
2.2. Approach
In this project, the research team intends to solve the problem of heavy objects falling from the pedestal. In contrast to the single robotic arm approach used by other researchers, the approach taken in this research is to use two robotic arms, each of which performs a different function. Specifically, the first robotic arm is the primary robotic arm, which is responsible for handling heavy objects and moving them from one coordinate to another. The second arm is the secondary arm, which is used to assist the first arm, and the second arm is used to fix the base so that the weight will not fall from the base. The two robotic arms work together to realize the function of carrying heavy objects.
In addition to setting up the robotic arms, the research team will also apply the knowledge of robot kinematics and inverse kinematics to set up the planning path for the two robotic arms, and set up the speed and acceleration of the robotic arms to ensure that the robotic arms are able to walk out of a smooth curve when accelerating and decelerating.
The research team will use two options, one option is to import the stl file created in solidwork and then simulate and test it in matlab, and the other option is to not import the file created in solidwork and just use matlab to set up the robotic arms, then the research team will use solidwork and matlab to create and simulate the movement process of the robotic arm to simulate the final movement results.
2.3. System Overview
Robotic arms can be categorized into traditional and new robotic arms; the experimenter referred to various traditional robotic arm models and new robotic arm models [11] and decided to use the more mature traditional robotic arm.The experimenter referred to a wearable upper limb rehabilitation robot with tension mechanism features [12] and designed a similar structure.This robot arm simulation uses two identical robot arms; each arm consists of a base and five parts, in the figure below, the following figure is the robot arm model created with solidwork:
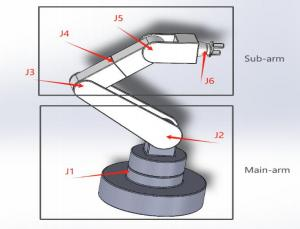
Figure 1: Robot Arm Constructed by Solidwork
As one of the common manufacturing robots in today's industrial manufacturing field, the design principle of the robotic arm involves a number of fields, such as structural mechanics, dynamics, kinematics, and so on [13]. The structural design of the robotic arm is the key to determine the flexibility, movement accuracy and load capacity of the entire arm. The robotic arm designed in this project is mainly used for clamping and loading work, based on the principle of kinematics engineering, the six- axis articulated robot is designed as shown in figure above
2.4. Design Basis
The base of the six-axis articulated robotic arm designed in this project is fixed on the worktable to maintain the stability of the whole arm. The base fixation method is more lenient to the installation area requirements, a smaller installation area can realize a larger working range and flexible movement tasks, with a high travel accessibility.
Thanks to the fixed base design, the whole arm does not have moving joints and does not need to be equipped with additional sliding guides, which makes the whole arm have a more compact structure and good reliability under small inertia.
2.5. Mechanical Structure
(1) Connecting rod mechanism: The robotic arm of this project realizes the connection between each motion joint through the connecting rod mechanism. According to the working range and flexibility requirements of the robotic arm, the combination of connecting rods of different lengths and angles is used to design the required robotic arm structure. The overall structure consists of two parts: the main arm and the assistant arm: The main arm, including the base and the first and second joints, is the main load- bearing part of the whole robot arm, and the large displacement and large load of the robot arm in the working process will be completed by the main arm; the secondary arm includes the third joint to the sixth joint, and the secondary arm is the main part of the spatial attitude control of the robot arm, and it is the key for the robot arm to realize the fine motion control.
(2)Motion joints: The motion of the six-axis articulated robot in this project is realized by six rotary joints, each motion joint is independently controlled by independent servo motors, providing independent degrees of freedom for the robotic arm by rotating around the axis, and the sub- movements of each joint will be synthesized at the end of the robotic arm to realize the free motion of the robotic arm in the space, so that the robotic arm can carry out specific loading and handling tasks in the specific application scenarios, the robotic arm The functions of each joint are as follows: The first joint J1 is mounted on the base of the arm to realize the rotation function of the arm in the horizontal plane, so that the arm can swing from side to side in space.
The second joint J2 will be used as the shoulder joint to rotate around the horizontal axis to carry out the up and down movement of the robotic arm, realizing the lifting and lowering function; The third joint, J3, is used as the elbow joint to increase the movement ability of the arm, to realize the extension and retraction of the arm during the execution of the task, or to further adjust the height of the arm.
The third, fourth and fifth joints J4, 5, and 6 will be the wrist joints of the robotic arm, respectively, to control the rotation, tilt and gyration of the mechanical forearm to determine the direction and angle of the end-effector, which is the main control joint for the attitude and precise positioning of the end-effector of the robotic arm.
3. Structural Optimization
3.1. Center of Gravity Design
In order to develop the static stability of the system and base, the center of gravity of the robotic arm is designed to be close to the position of the base of the robotic arm, which reduces the possibility of the robotic arm toppling over and the low center of gravity design also improves the stability of the robotic arm's movement in the motion work engineering and reduces the vibration of the movement of the robotic arm as much as possible.
Optimizing the center of gravity of the robotic arm to the base position will also reduce the energy efficiency of the robotic arm, too biased and too high a center of gravity will lead to the robotic arm in the process of movement requires additional torque to maintain the stability of the robotic arm, which will undoubtedly increase the energy consumption of the robotic arm. Therefore, the low center of gravity design near the base adopted in this project will effectively control the motion moment of the arm, reduce the load of the whole arm drive system, and optimize the energy efficiency.
3.2. Balance Optimization
In the working process of the robotic arm, the balance and stability of the robotic arm is crucial, the joints and connecting rods of the robotic arm are structured to realize the uniform distribution of mass as much as possible, and the mass balance of the robotic arm will directly determine the degree of swing and vibration of the robotic arm in the process of movement.
Therefore, in the structural design of the arm, the principle base of the forearm is part of the lightweight aluminum alloy material, while the base and the main arm are near the center of gravity using heavier steel, which helps to control the center of gravity of the arm. Also, through the finite element analysis technology, it removes the redundant materials in the arm structure while maintaining sufficient strength and stiffness, but it is also able to reduce the redundant weight of the arm so that the arm is in the overall structure of the quality of the uniform distribution.
After setting up the case of the robotic arm, the team will use a cube to represent the base where the weight is located, and a cube or a small ball to represent the weight. The specific model setup is shown below:
Scenario 1 (use solidwork to import the robotic arm model):
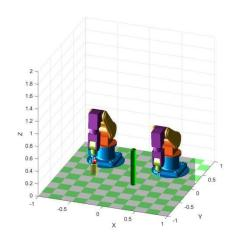
Figure 2: Simulation 1 of Two Robot Arms
As shown in the figure above, there are two identical robotic arms in the coordinate system, each consisting of five parts, represented in the figure using different colors. The robotic arm on the left is the main robotic arm, and the robotic arm on the right is the auxiliary robotic arm. In front the main robotic arm consists of a yellow cube which is the base with a red ball on it which is the weight, and on the right side, there is another green cylinder, which is another base which is the target position of the weight, the robotic arm will move the ball from its existing position to the top of the green cylinder.
Option 2 (without importing the created stl file):
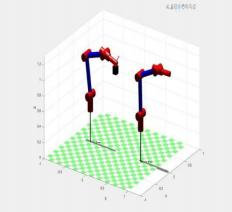
Figure 3: Simulation 2 of Two Robot Arms
As shown in the figure, in this system, there are also two identical robotic arms, and unlike before, these are not imported stl files, but robotic arms simulated directly in matlab.
Related Functions:In order to achieve the goal of the project team, this team used several functions in the code, including functions for setting up the robot and functions for trajectory planning.
Important related tools and functions in the code:
(1) Simscape: Help people to simulate the movement of the robot.
(2) Link: to define each link and joint of the robot
(3) Transl: generates a chi-square transformation matrix to represent translations.
(4) Plot: plots the trajectory of the robot arm in the graphics window
(5) Ikunc: inverse kinematic solution function to calculate the joint angles of the end-effector at a given position and attitude
(6) Jtraj: generates trajectories in the joint space that allow the robot to move smoothly from one joint configuration to another, and calculates a smooth transition path from the initial position to the target position by interpolation. This function ensures that there is no sudden acceleration or deceleration of the robotic arm during movement, and avoids discontinuous or violent movements, thus realizing smooth trajectories
(8) Fill3: draw a three-dimensional polygon for drawing the base
4. Result
In order to compare the current program of the group with the pre-improvement program, the group went to simulate the pre-improvement program and the risks of the program using matlab, and the results of the simulation are shown in the following video:
https://drive.google.com/file/d/1To6FH5vIP8b TrPkniv8SR-_HEwrVNtTj/view?usp=drive_link
As shown in the video above, it is difficult to avoid the problem of unstable bases if only a single arm is used to move heavy objects.
After the simulation, the team successfully achieved the intended purpose with two scenarios and the link to the demonstration results is shown below:
Solution 1:
https://drive.google.com/file/d/1HlfyPZ_U5hre a_P-dttZr7XML2UWJQoM/view?usp=drive_link
As shown in the figure, the model uses two robotic arms, first the second robotic arm (auxiliary robotic arm) fixes the base to ensure the stability of the base, and then the first robotic arm moves the weight to the position of the base so as to ensure that the weight will not fall.
Solution 2:
https://drive.google.com/file/d/1J9D7ErD6N__ vk3VNKt7JKpN8azEqiasW/view?usp=drive_link
As shown in the figure, in the simulation, it is obvious that the first robotic arm (main robotic arm) finds the position where the weight (ball) is located, then the second robotic arm (auxiliary robotic arm) finds the base and fixes the base, then the first robotic arm moves the ball from the initial position to the new position after the second robotic arm fixes the base, and the second robotic arm finds the base at the new position and fixes it. It is worth noting that the trajectories of the ends of the two arms can be seen in the simulation as two smooth curves. As the results of the demonstration show, both scenarios succeeded in achieving the set goals.
Comparison with baseline: Compared to the previous solution, the current solution has the following improvements: Realized the cooperation of two robotic arms in handling heavy objects Stabilized the base so that the weight will not fall off the base.
However, there are still some limitations in the proposed solution, the biggest one being that the power consumption and complexity of two robotic arms is significantly greater than that of one robotic arm, which needs to be taken into account in order to save costs.
5. Conclusion
In this project, the team successfully designed and implemented a dual robotic arm system to solve the problem of objects falling off the platform during transportation. By using two arms instead of one, the main arm handles the movement of the object while the secondary arm stabilizes the base. This approach increases the reliability of the system, especially when handling large or unstable loads. The team used SolidWorks to create an STL model and MATLAB to simulate the movement of the robotic arm. Two different methods were tested - one was to import the STL file and the other was to simulate it directly in MATLAB. Both methods achieved the desired results. Collaboration between the two arms proved to be effective, with smoother motion profiles and higher stability compared to the single-arm system. However, the higher complexity and power consumption of the two-arm system marks it as a potential area for optimization in future work.
6. Future Work
The experimenter summarizes some of the work ahead by referring to the development of robotic arms and the parameters of past [14] and present robotic arms.
(1) At present, the project only considers the angular rotation and trajectory of the joints of the robotic arm and does not consider the effects of friction, gravity, elastic deformation of the drive wire, and other factors on the accuracy of the joint position. The subsequent further research can carry out mechanical analysis, through the establishment of an accurate mechanical model, the resulting movement error compensation and regulation; at the same time, taking into account the use of material science, select the appropriate performance of the material.
(2) The current design of the three-dimensional model, is still matlab simulation, is not the final program, the measurement and calculation results are not the real contact force of the operating end of the robotic arm, the follow-up can be in-depth Using matlab technology, we can carry out research on the design and manufacture of the force-affected part of the robotic arm. This kind of sensor is expected to directly measure the contact force of the operating end of the robotic arm, which will provide important technical support for precise operation control.
(3) The current motion planning method can only guarantee the continuity at the speed level, and other new motion planning methods can be carried out to make the acceleration smooth and continuous, so as to improve the smoothness of the movement of the robotic arm.
(4) The hysteresis phenomenon may exist during the current movement of the robotic arm, and the influencing factors are complex, in order to improve the overall operating accuracy of the spinal orthopedic robot, it is necessary to compensate for the hysteresis error, and the accuracy compensation algorithms [15] can be subsequently established for the kinematics, the control model, etc. Afterwards, this group would like to put forward a kind of fixed- parameter/adaptive-parameter for the redundant robotic arm repetitive motion planning problem under the initial bias. After that, the group would like to propose a fixed-parameter/adaptive- parameter end-state optimization index for the problem of redundant robotic arm repetitive motion planning under initial deviation, and adopt the finite-value end-state zeroed neural network method to solve the problem, so that the finite- time convergence of the end-effector positional error can be achieved while improving the convergence accuracy of the joints of the robotic arm. In order to ensure the smooth operation of the robotic arm, a smooth modified finite value function is proposed for the final state optimization index.
Acknowledgment
With the unremitting efforts of the team members, the method design, modeling analysis, data collation and conclusion analysis of the project research were successfully completed, and finally this article was written.
In the process of this project, Chao Han and Chenze Wu contributed equally to this work and should be considered as co-first authors. Other members determine the order of authors according to their contributions. Zhilun Qin should be considered as second author and Zewen Cheng should be third author.
References
[1]. ZHOU Ji Ping, YAN Jing Ping, CHEN Wen Jia. Current status and thoughts on the research of dual-arm robots[J]. Robotics,2001, (02) :175-177.
[2]. Su Yue. Research on coordinated operation and supple control method of dual-arm collaborative robot [D]. Huazhong University of Science and Technology,2018.
[3]. Su Yue. Research on coordinated operation and supple control method of dual-arm collaborative robot [D]. Huazhong University of Science and Technology,2018.
[4]. Li Yuqi. Simulation research on trajectory planning and coordination of six-degree-of-freedom robotic arm [J]. Electronic Measurement Technology,2018,41(02) :50-54.
[5]. Liu Yang,Sun Kai. Research status and technology development analysis of collaborative robots[J]. Journal of North University of Technology,2017,29(02) :76-85.
[6]. Wei Xuelong. Research on collision avoidance path planning and trajectory optimization algorithm of double mechanical arms[D]. Harbin Institute of Technology, 2020
[7]. Xiao Xiao. Research status and development trend of industrial robots[J]. Wireless Internet Technology,2021,18(23):49-50.
[8]. GUI Yuanyuan, ZHAI Junmeng. Development status and development trend of industrial robots[J]. Science and Technology Wind, 2020, (21) :11.
[9]. Translated with DeepL.com (free version)"Pick and place robotic arm: a review paper." Int. Res. J. Eng. Technol 8.2 (2021): 2121-2129.
[10]. Sekkat, H. ; Tigani, S. ;Saadane, R. ; Chehri, A. Vision-Based Robotic Arm Control Algorithm Using Deep Reinforcement Learning for Autonomous Objects Grasping.Appl. Sci. 2021, 11, 7917. https://doi.org/10.3390/app11177917
[11]. S. Wu, Q. Ze, J. Dai, N. Udipi, G.H. Paulino, R. Zhao, Stretchable origami robotic arm with omnidirectional bending and twisting, Proc. Natl. Acad. Sci. U.S.A.118 (36) e2110023118,https://doi.org/10.1073/pnas.2110023118 (2021).
[12]. Pang, Z.; Wang, T.; Wang, Z.; Yu, J.; Sun, Z.; Liu, S. Design and Analysis of a Wearable Upper Limb Rehabilitation Robot with Characteristics of Tension Mechanism. Appl. Sci. 2020, 10, 2101. https://doi.org/10.3390/app10062101
[13]. I. Vojtko, M. Kočiško, M. Janák and V. Fečová, "The new design of robot arm," 2013 IEEE 11th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl'any, Slovakia, 2013, pp. 53-56, doi: 10.1109/SAMI.2013.6480943. keywords: {Mathematical model;Springs;Pneumatic systems;Computational modeling;Robot sensing systems;Manipulators}
[14]. Patidar, V., & Tiwari, R. (2016, January). Survey of robotic arm and parameters. In 2016 International conference on computer communication and informatics (ICCCI) (pp. 1-6). IEEE.
[15]. Gong, Tianyu. "Compensation Strategies for Improving Industrial Robots' Positioning Accuracy." (2024).
Cite this article
Han,C.;Wu,C.;Qin,Z.;Cheng,Z. (2025). Cooperate of Two Robot Arms About Carry Objects. Applied and Computational Engineering,134,102-111.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 5th International Conference on Signal Processing and Machine Learning
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. ZHOU Ji Ping, YAN Jing Ping, CHEN Wen Jia. Current status and thoughts on the research of dual-arm robots[J]. Robotics,2001, (02) :175-177.
[2]. Su Yue. Research on coordinated operation and supple control method of dual-arm collaborative robot [D]. Huazhong University of Science and Technology,2018.
[3]. Su Yue. Research on coordinated operation and supple control method of dual-arm collaborative robot [D]. Huazhong University of Science and Technology,2018.
[4]. Li Yuqi. Simulation research on trajectory planning and coordination of six-degree-of-freedom robotic arm [J]. Electronic Measurement Technology,2018,41(02) :50-54.
[5]. Liu Yang,Sun Kai. Research status and technology development analysis of collaborative robots[J]. Journal of North University of Technology,2017,29(02) :76-85.
[6]. Wei Xuelong. Research on collision avoidance path planning and trajectory optimization algorithm of double mechanical arms[D]. Harbin Institute of Technology, 2020
[7]. Xiao Xiao. Research status and development trend of industrial robots[J]. Wireless Internet Technology,2021,18(23):49-50.
[8]. GUI Yuanyuan, ZHAI Junmeng. Development status and development trend of industrial robots[J]. Science and Technology Wind, 2020, (21) :11.
[9]. Translated with DeepL.com (free version)"Pick and place robotic arm: a review paper." Int. Res. J. Eng. Technol 8.2 (2021): 2121-2129.
[10]. Sekkat, H. ; Tigani, S. ;Saadane, R. ; Chehri, A. Vision-Based Robotic Arm Control Algorithm Using Deep Reinforcement Learning for Autonomous Objects Grasping.Appl. Sci. 2021, 11, 7917. https://doi.org/10.3390/app11177917
[11]. S. Wu, Q. Ze, J. Dai, N. Udipi, G.H. Paulino, R. Zhao, Stretchable origami robotic arm with omnidirectional bending and twisting, Proc. Natl. Acad. Sci. U.S.A.118 (36) e2110023118,https://doi.org/10.1073/pnas.2110023118 (2021).
[12]. Pang, Z.; Wang, T.; Wang, Z.; Yu, J.; Sun, Z.; Liu, S. Design and Analysis of a Wearable Upper Limb Rehabilitation Robot with Characteristics of Tension Mechanism. Appl. Sci. 2020, 10, 2101. https://doi.org/10.3390/app10062101
[13]. I. Vojtko, M. Kočiško, M. Janák and V. Fečová, "The new design of robot arm," 2013 IEEE 11th International Symposium on Applied Machine Intelligence and Informatics (SAMI), Herl'any, Slovakia, 2013, pp. 53-56, doi: 10.1109/SAMI.2013.6480943. keywords: {Mathematical model;Springs;Pneumatic systems;Computational modeling;Robot sensing systems;Manipulators}
[14]. Patidar, V., & Tiwari, R. (2016, January). Survey of robotic arm and parameters. In 2016 International conference on computer communication and informatics (ICCCI) (pp. 1-6). IEEE.
[15]. Gong, Tianyu. "Compensation Strategies for Improving Industrial Robots' Positioning Accuracy." (2024).