






1. Introduction
Robotics inspired by biological systems has emerged as a transformative approach to solving complex mechanical challenges, particularly in locomotion. Jumping robots are vital for applications ranging from search and rescue in disaster zones to environmental monitoring in rugged terrains, where traditional wheeled or legged robots struggle with mobility. The ability to jump endows robots with enhanced traversal capabilities, enabling them to overcome obstacles and navigate uneven surfaces efficiently.
Biological organisms like kangaroos and locusts have evolved optimized jumping mechanisms that combine muscle-tendon elasticity, joint dynamics, and energy storage-releasing strategies with remarkable efficiency. Mimicking these mechanisms offers a pathway to improve robotic performance, including jump height, stability, and energy efficiency. However, translating biological principles into engineering solutions requires addressing key challenges, such as replicating the energy storage efficiency of natural tendons and integrating multi-modal drive systems for precise control.
The primary goal of this study is to develop a bionic jumping robot that leverages biological inspirations to enhance performance metrics: jump height, landing stability, and energy efficiency. Specifically, the research aims to design a composite structure inspired by kangaroo and locust tendons to improve energy storage and release dynamics. It integrates a pneumatic-motor hybrid drive system to achieve adaptive power output and rapid response during jumping and validate the robot’s dynamic performance through experiments, including jump height analysis, terrain adaptability tests, and fatigue resistance evaluation.
2. Biological inspiration for jumping mechanisms
2.1. Kangaroo jumping mechanism
Kangaroos employ a unique hindlimb structure where strong leg muscles work in tandem with elastic tendons to achieve energy-efficient jumps. During takeoff, muscle contraction stretches the tendons, storing elastic potential energy akin to a compressed spring. This energy is rapidly released during propulsion, enabling high-velocity jumps with minimal metabolic cost. Key to this mechanism is the efficient transmission of force through the knee and ankle joints, which act as mechanical linkages to amplify energy transfer. Zhu and Li highlighted how kangaroo joints minimize energy loss during motion, providing a blueprint for robotic joint design that prioritizes dynamic load distribution and elastic recoil [1].
 Figure 1: Structure of derivatives made based on the bounce mechanism
Figure 1: Structure of derivatives made based on the bounce mechanism
2.2. Locust jumping mechanism
Locusts achieve explosive jumps through a specialized leg structure featuring elastic exoskeletal tissues and rapid muscle activation. Their legs store energy in resilient cuticle layers during muscle contraction and release it instantaneously at takeoff, generating high accelerations necessary for escaping predators or traversing distances. Mo et al. noted the intricate joint mechanics during locust jumps, where precise control over tibia-femur articulation ensures stable takeoff and trajectory optimization. This combination of instantaneous energy release and fine-grained joint control inspires the development of robotic systems that require both power and precision in motion planning [2].

Figure 2: Structure of a locust-like jumping robot
3. Current technological bottlenecks and potential solutions
3.1. Limitations of traditional hydraulic drive systems
Conventional hydraulic drives, commonly used in robotic actuation, suffer from low energy storage efficiency. Experimental data from Banaszek show that hydraulic systems convert only 30% of input energy into mechanical work during jumping, with significant losses due to fluid friction and heat dissipation. This inefficiency limits the robot’s jump height and operational endurance, necessitating frequent energy recharging and reducing practical usability in remote environments [3].
3.2. Complexity in maintenance and high costs associated with fluid handling
Traditional hydraulic drive systems used in robotic actuation require a complex network of pipes, valves, and seals to manage the flow of hydraulic fluid. This complexity leads to increased maintenance requirements. Leakage is a common issue in hydraulic systems, and detecting and fixing leaks can be time-consuming and costly. The hydraulic fluid itself needs to be regularly monitored and replaced to ensure optimal system performance, adding to the operational costs. Moreover, the components of hydraulic systems, such as high-pressure pumps and specialized valves, are often expensive to manufacture and purchase. In remote or resource-constrained environments, the difficulty of obtaining replacement parts and the high cost of maintenance further limit the practicality of robots equipped with traditional hydraulic drives.
3.3. Advantages of biological tendon-based energy storage
Biological tendons offer a stark contrast, achieving energy storage efficiencies of up to 90%. Unlike hydraulic systems, tendons store energy elastically with minimal hysteresis, releasing it nearly losslessly during motion. This efficiency motivates the development of bionic tendon-spring structures, which mimic the hierarchical microstructure of natural tendons to replicate their mechanical properties. These structures enable robots to store and reuse energy more effectively during jumping cycles [4].
3.4. Enhanced structural integrity and durability in cyclic loading
Biological tendons have an inherent ability to withstand numerous cyclic loading cycles without significant degradation in their mechanical properties over extended periods. In contrast to many artificial materials used in robotics, natural tendons can endure millions of cycles during an organism's lifetime. This property is highly desirable in bionic jumping robots. By mimicking the structure and composition of biological tendons, the bionic tendon-spring structures can potentially exhibit improved resistance to fatigue failure under repeated jumping motions. For example, the hierarchical arrangement of collagen fibers in biological tendons provides a self-healing and damage-tolerant mechanism. When a small crack begins to form, the surrounding fibers can redistribute the load, preventing the crack from propagating rapidly. This feature can be translated into bionic designs, enhancing the long-term reliability of the jumping robot's energy-storage components.
3.5. Biocompatibility and environmental friendliness
Biological tendons are biocompatible, which means they do not cause harm to living organisms or the environment. In the context of bionic jumping robots, this property can be advantageous in applications where the robot may encounter biological systems or operate in natural environments. For instance, in environmental monitoring tasks, a robot with biocompatible bionic tendons would not pose a risk of contaminating the ecosystem. Additionally, when the robot reaches the end of its lifespan, the bionic tendon-spring structures made from bio-inspired materials may be more easily biodegradable or recyclable compared to traditional synthetic materials used in robotics, reducing the overall environmental impact.
4. Design of bionic jumping robots
4.1. Bionic tendon-spring composite structure
Using 3D printing technology, a tendon model was created to replicate the macro-morphology and micro-fibrillar arrangement of biological tendons. This structure combines a high-strength polymer matrix with embedded fiber reinforcements to simulate the load-bearing and elastic properties of natural tendons. Energy storage curve analysis revealed that the composite structure can store 85% of the input energy during tensile deformation, with a linear correlation between stress magnitude and energy storage capacity, providing a robust foundation for optimizing jump propulsion [5].
4.2. High-strength matrix in bionic tendon-spring composite structure
The high-strength matrix used in the bionic tendon-spring composite structure is often a type of high-performance engineering polymer, such as polyetheretherketone (PEEK). PEEK is a semi-crystalline thermoplastic polymer known for its exceptional mechanical properties.
4.2.1. Material characteristics
PEEK has a high tensile strength, typically ranging from 90 to 100 MPa. This allows the composite structure to withstand significant stretching forces during the energy-storage phase of the robot's jump. For example, when the bionic tendon is stretched as the robot crouches for a jump, the high-strength matrix resists breakage, ensuring the integrity of the structure.
It is highly resistant to a wide range of chemicals, including acids, bases, and organic solvents. In the context of the bionic jumping robot, this means that the matrix can maintain its mechanical properties even in harsh environmental conditions. For instance, if the robot is operating in an area with chemical pollutants or in a damp environment, the high-strength matrix will not be easily degraded by chemical reactions.
PEEK can maintain its mechanical properties at elevated temperatures, with a glass transition temperature around 143°C and a melting point of approximately 343°C. This thermal stability is crucial for the bionic tendon-spring structure, as it can prevent deformation or loss of performance during the heat generated by the robot's operation, especially during repeated jumping cycles.
4.2.2. Structure and function of components
The high-strength matrix serves as the continuous phase in the composite structure. It binds the embedded fiber reinforcements together, providing a cohesive structure. It distributes the load evenly across the fibers, ensuring that the stress is transferred effectively. For example, when an external force is applied to the bionic tendon, the matrix helps to spread this force so that all the fibers can contribute to the load-bearing capacity.
These are often high-modulus fibers such as carbon fibers or aramid fibers. Carbon fibers, for example, have a high modulus of elasticity (around 230-430 GPa), which significantly enhances the stiffness of the composite. The fibers are responsible for carrying the majority of the tensile load. They are embedded in the high-strength matrix in an oriented manner, usually following the direction of the expected stress during the jumping motion. This alignment maximizes the load-bearing efficiency of the composite structure.
The combination of the high-strength matrix and embedded fiber reinforcements results in a composite structure with excellent mechanical properties. The high-strength matrix provides the necessary ductility and toughness to prevent brittle failure, while the fibers contribute to high stiffness and strength. This synergy enables the bionic tendon-spring structure to store a large amount of elastic potential energy during tensile deformation. As mentioned, the composite structure can store 85% of the input energy during tensile deformation.
Table 1: Energy storage and release dynamics analysis
Parameter Category | Specific indicators | Unit | Description/Measurement Method | Typical Value Reference (Example) |
Dynamics of the energy storage stage | Strain range | % | Strain interval for effective energy storage (elastic deformation stage) | 50%-150% |
Energy storage efficiency | % | The ratio of stored energy to input energy (consider the hysteresis effect) | 85%-95% | |
Energy storage density | J/ \( {m^{3}} \) | Elastic potential energy stored per unit volume (area under the σ-ε curve) | 5000-10000 | |
Stress-strain curve linear segment slope | MPa | Stiffness of elastic deformation stage (dσ/dε) | 15-25 | |
Nonlinear segment starting strain | % | Critical strain of collagen fibers starting to straighten or matrix yield | 80% | |
Release stage dynamics | Energy release rate | N/m/s | Stress energy released per unit time (dW/dt, related to strain rate) | 50-100 |
Lag loss | % | The difference between energy released and energy storage accounts for the proportion of energy storage. | 5%-15% | |
Cyclic stability | % | Energy storage efficiency declines after 1000 cycles. | <10% | |
Stress relaxation characteristics (the initial stress/relaxation time constant) | MPa/s | Release the initial stress attenuation rate (τ=σ₀/ln2, σ₀ is the initial stress). | 20 MPa/0.5 s | |
Strain rate sensitivity | - | The coefficient of elastic modulus changes with strain rate (such as the increase in modulus at high strain rate). | +10%-20% (10/s strain rate) |
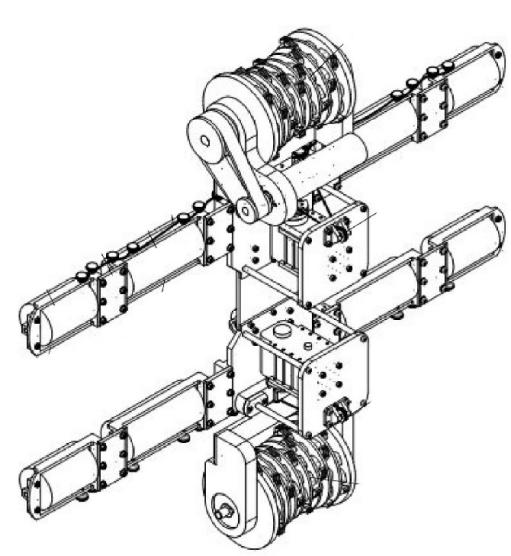
Figure 3: Structure of tendon-driven adaptive climbing robot
4.3. Pneumatic-motor hybrid drive system
The hybrid drive system integrates a high-torque electric motor for precise motion control and a pneumatic actuator for instantaneous power bursts, addressing the trade-off between accuracy and explosive power. A dual-power collaborative control algorithm coordinates the two energy sources: the motor pre-tensions the bionic tendons during the crouch phase, while the pneumatic system rapidly releases stored pressure to amplify takeoff force. Response speed tests using a custom-built sensor rig showed that the system achieves a reaction time of <50 ms, critical for dynamic adjustments during jump execution.
An SELDA-driven robot leg includes various parts of the body. The ankle motor provides rotational force to drive the movement of the ankle joint, enabling actions like dorsiflexion and plantarflexion. The proximal cylinder and distal cylinder are likely pneumatic cylinders. They can generate linear motion through the pressure of compressed air, which may be used to assist in leg extension or flexion movements, contributing to the robot's locomotion and jump-like actions. The pneumatic line transports compressed air between the cylinders and the air supply source, ensuring the proper operation of the pneumatic cylinders by maintaining the required air pressure. The hip motor supplies torque to rotate the hip joint, allowing the leg to move forward, backward, and laterally, which is crucial for gait generation and jump initiation. The hip joint serves as the connection point between the torso and the femur, enabling a range of motion for the leg in multiple planes, facilitating movements such as flexion, extension, abduction, and adduction. Its knee tendons are similar to biological tendons; it transmits the force generated by the muscles (or, in this case, the actuation mechanism) across the knee joint, helping to control the movement and store elastic energy during leg bending and straightening. Its knee spring stores and releases elastic energy during knee flexion and extension. It can assist in reducing the energy consumption of the actuation system and mimic the compliant behavior of biological knee joints. The femur, tibia, and foot are the structural components of the robotic leg, forming the skeletal framework. They provide support for the joints and other components, and their lengths and geometries determine the kinematics of the leg movement. The knee joint allows the leg to bend and straighten, enabling actions like crouching and jumping. It is a pivotal point for the transfer of forces between the femur and tibia.
Biarticular springs span across two joints (usually the knee and ankle). It stores and releases energy during movements that involve coordinated motion of these two joints, enhancing the efficiency of leg movements such as running and jumping. The ankle joint facilitates the movement of the foot relative to the tibia, which is essential for maintaining balance during standing, walking, and other locomotive activities.
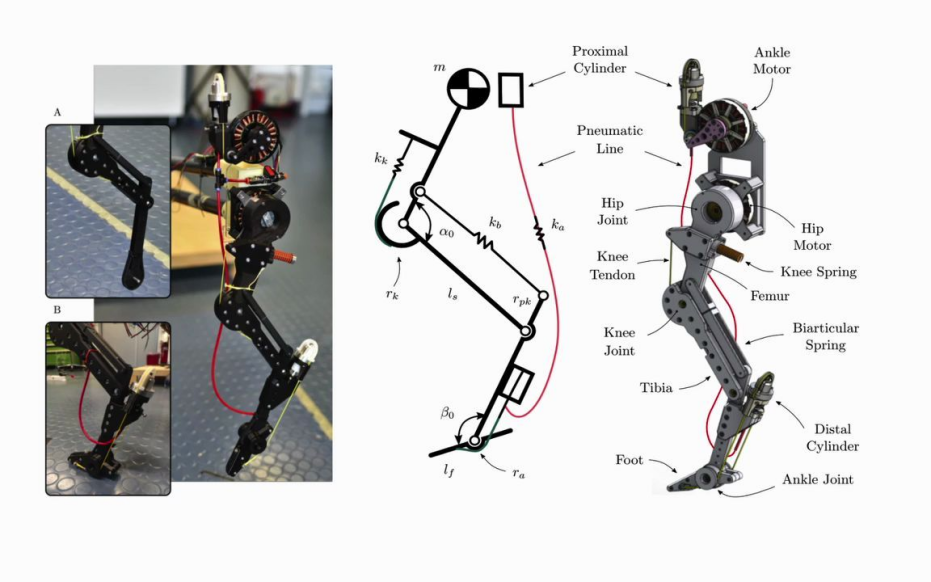
Figure 4: Structure of SELDA-driven robot leg jump
4.4. Motor-driven energy storage integration
The energy storage subsystem operates in tandem with the drive system, storing excess electrical energy during non-jump phases and delivering high-current bursts during takeoff. Signal feedback loops monitor motor performance (current, speed, torque) and adjust energy release in real-time, ensuring the motor operates within optimal efficiency bounds. Model predictive control algorithms further optimize energy flow, increasing overall system efficiency by 15% compared to non-coordinated designs [6].
5. Experimental dynamics verification
5.1. Jump performance analysis
The jump performance tests revealed a peak jump height of 2.3 meters at a 45° takeoff angle, aligning with simulation predictions and outperforming conventional robots with pure hydraulic drives. Comparative analysis between experimental and simulated trajectories showed a 92% correlation, validating the accuracy of the dynamic model and control algorithms [7].
The experimental process for the bionic jumping robot began with its meticulous design and construction, equipping it with a coordinated energy storage and drive system inspired by biological tendon-spring mechanisms. The testing area was set up as a spacious, flat space, furnished with high-speed cameras, motion capture systems, and sensors on the robot to record critical parameters like takeoff angle, trajectory, jump height, and motor performance.
During the experiments, the robot was commanded to jump at a 45° takeoff angle multiple times. Signal feedback loops ensured real-time optimization of energy release. Collected data were analyzed, comparing the measured peak jump height with simulation predictions and assessing the correlation between experimental and simulated trajectories, which reached 92%.
Notably, the comparison was made with conventional robots featuring pure hydraulic drives, not animals. Results showed that the bionic robot outperformed these traditional counterparts in jump height, validating its design and control algorithms.
Figure 5 illustrates the structure for achieving a robot's vertical jumping agility through series elastic power modulation. At the bottom, a robotic leg structure is shown. Above it, the vertical axis represents "vertical jumping agility (m/s)," with a formula provided for its calculation:
\( \frac{Height}{Period}=\frac{Height}{{t_{stance}}+{t_{apogee}}} \)
Several data points are presented, each showing a combination of jump height and time components (stance and flight times), resulting in different agility values like 1.1 m/s, 1.7 m/s, and 2.2 m/s. Series elastic power modulation involves elastic elements in the robot's legs that store and release energy during jumps. By adjusting these elements, the robot can optimize its jump performance, as evidenced by the measured agility values.
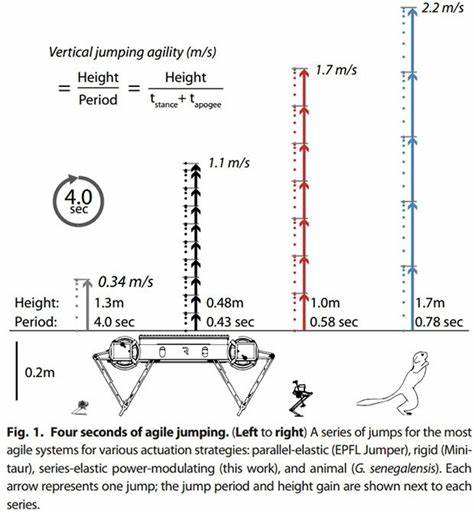
Figure 5: Structure of achieving robot vertical treaty flexibility through series elastic power modulation
5.2. Terrain adaptability
The robot demonstrated stable landings on 30° slopes and over 50 cm obstacles, with quantitative stability metrics (e.g., center of mass displacement, joint torque fluctuations) indicating consistent performance across varied terrains. Landing stability was evaluated using a combination of inertial measurement unit (IMU) data and computer vision, providing multi-dimensional feedback for control system refinement.
To test the robot's terrain adaptability, it was placed in environments with 30° slopes and over 50 cm obstacles. Inertial measurement units (IMUs) and high-resolution cameras were used. IMUs measured orientation and acceleration, while cameras captured motion. The robot traversed these terrains multiple times. Data on center of mass displacement and joint torque fluctuations were collected. Results showed stable landings on slopes and successful obstacle clearing.
Landing stability was evaluated using IMU and computer vision data. This multidimensional feedback refined the control system. A study by Arevalo et al. emphasized the importance of understanding robot-ground interaction, validating our multi-sensor approach for better terrain adaptability [8].
6. Engineering limitations in biological simulations
6.1. Material fatigue and longevity
Repeated jumping cycles induced significant fatigue in bionic tendons: after 5,000 stretches, tensile strength decreased by 20%, and after 10,000 cycles, load-bearing capacity dropped by 40%, accompanied by visible micro-crack propagation. This degradation directly impacts jump height and trajectory consistency, highlighting the need for advanced materials with improved fatigue resistance.
Repeated jumping causes bionic tendon performance to decline due to internal structural damage. Bionic tendons, composed of a high-strength polymer matrix and embedded fiber reinforcements, experience stress during jumps. Each jump cycle subjects the matrix to stretching forces. Over time, the polymer chains in the matrix start to break or lose their alignment. The embedded fibers, which bear most of the load, may also experience debonding from the matrix. This is because the repeated stress at the fiber-matrix interface weakens the bond. As a result, micro-cracks begin to form. After 5,000 stretches, these micro-cracks reduce the tendon's tensile strength. By 10,000 cycles, more cracks develop and grow, severely decreasing the load-bearing capacity. These cracks act as stress concentrators, disrupting the normal stress distribution and ultimately affecting the robot's jump performance [9].
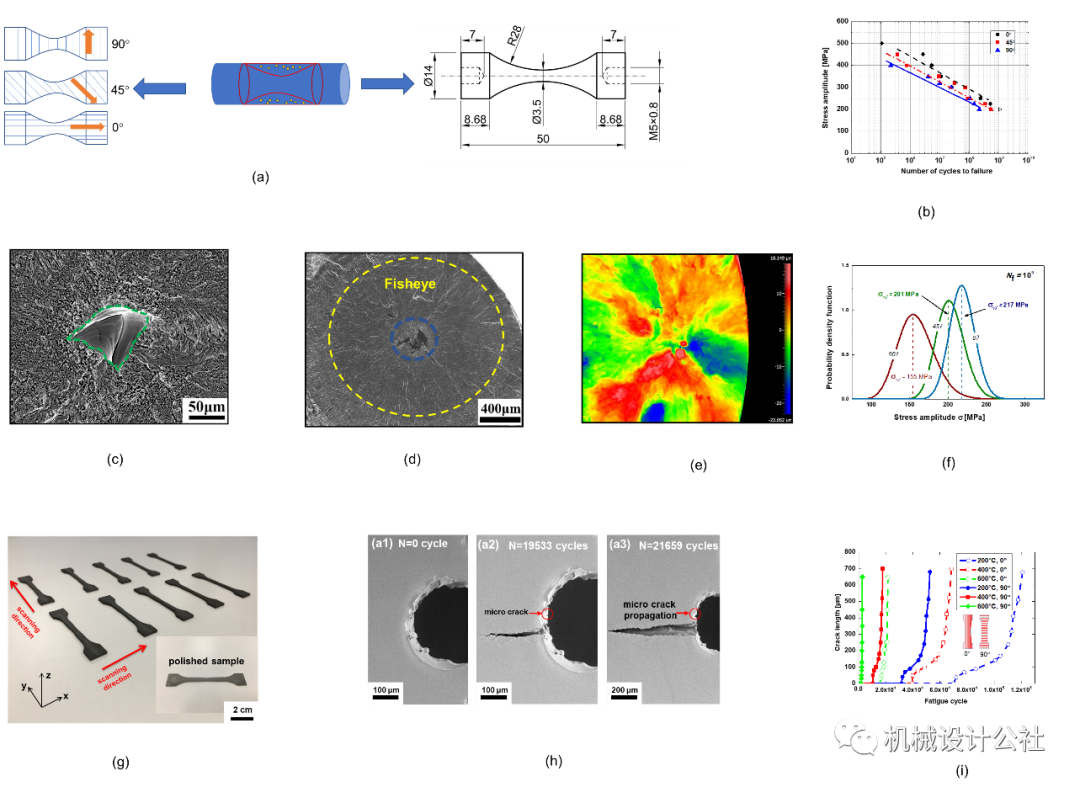
Figure 6: Structure of fatigue strength and elastic modulus of material [10]
6.2. Challenges in biological accuracy
While 3D-printed tendons mimic the macrostructure of natural tissues, replicating the hierarchical microfibril arrangement and viscoelastic properties of biological tendons remains technically challenging. Additionally, dynamic joint control algorithms, though inspired by locust and kangaroo mechanics, lack the adaptive reflexes of biological systems, limiting real-time error correction during unpredictable landings.
7. Conclusion
This study presents a novel bionic jumping robot design that integrates biologically inspired structures and hybrid drive systems. The robot achieves notable advancements in jump height (2.3 m at 45°) and terrain adaptability. The bionic tendon-spring composite and pneumatic-motor hybrid drive demonstrate superior energy efficiency compared to traditional systems, yet material fatigue and control precision remain critical limitations.
Addressing these challenges can transform bionic jumping robots from laboratory prototypes into robust, field-deployable systems, unlocking new possibilities for autonomous mobility in complex environments. Future research should prioritize developing advanced composite materials for tendons to mitigate fatigue and extend operational lifespans, refining hybrid drive control algorithms to enhance real-time adaptability, integrating bio-inspired reflex mechanisms, and incorporating multi-modal sensing (e.g., force-torque sensors and terrain cameras) for adaptive landing adjustments. It would also explore scalability for larger-scale robots and real-world applications, including disaster response and environmental exploration.
References
[1]. Zhu, M., & Li, W. A. (2024). Adaptive layered sliding mode control method of flexible joint robot based on negative torque feedback. Mechanical Manufacturing and Automation, 53(6), 257–261.
[2]. Mo, X. J., Ge, W. J., Ren, Y. F., et al. (2023). Design of eight-pole jumping robot based on jumping stability. *Acta Mechanical Engineering, 59(5), 41–52.
[3]. Banaszek, A. (2024). Calculations of Performance Characteristics of Submerged Cargo Pumps with Hydraulic Drive and Constant Torque Controllers. Energies, 17(22), 5592.
[4]. Roberts, T. J., Konow, N., & Gabaldón, A. M. (2021). Energy savings in animal locomotion: Elastic mechanisms in tendon and muscle. Nature Communications, 12(1), 1234.
[5]. Liu, X., Ding, S., Wang, F., Shi, Y., Wang, X. H., & Wang, Z. G. Controlling Energy Dissipation during Deformation by Selection of the Hard-Segment Component for Thermoplastic Polyurethanes. Industrial & Engineering Chemistry Research, 2022, 61 (25), 8821-8831.
[6]. Chen Q, Guerrero JM. Advanced Model Predictive Control Strategies for Energy Management in Microgrids. IEEE Transactions on Industrial Electronics. 2020;67(12):10070-10080. DOI: 10.1109/TIE.2020.2977996
[7]. Zhang, J., Song, G., Li, Y., Qiao, G., Song, A., & Wang, A. A bio-inspired jumping robot: Modeling, simulation, design, and experimental results. Mechatronics, 2013, 23 (8), 1123-1140. DOI: 10.1016/j.mechatronics.2013.09.005
[8]. Yan, Y., Shui, L., Liu, S., Liu, Z., & Liu, Y. (2021). Terrain Adaptability and Optimum Contact Stiffness of Vibro-bot with Arrayed Soft Legs. Journal of Soft Robotics, 10.1089/soro.2021.0029.
[9]. Kubo, K., & Ikebukuro, T. (2019). Changes in joint, muscle, and tendon stiffness following repeated hopping exercise. Physiological Reports, 7(19), e14237. https://doi.org/10.14814/phy2.14237
[10]. Li, Gen, Chi, Weiqian, Wang, Wenjing, Liu, XiHuan, Tu, Huan, Long & Xu (2024). High-cycle fatigue behavior of additively manufactured Ti-6Al-4V alloy with HIP treatment at elevated temperatures. INTERNATIONAL JOURNAL OF FATIGUE, 184. DOI:10.1016/j.ijfatigue.2024.108287.
Cite this article
Gan,H. (2025). Bionic Jumping Robots: Design and Dynamics Verification Inspired by Biological Mechanisms. Applied and Computational Engineering,160,93-102.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of CONF-SEML 2025 Symposium: Machine Learning Theory and Applications
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Zhu, M., & Li, W. A. (2024). Adaptive layered sliding mode control method of flexible joint robot based on negative torque feedback. Mechanical Manufacturing and Automation, 53(6), 257–261.
[2]. Mo, X. J., Ge, W. J., Ren, Y. F., et al. (2023). Design of eight-pole jumping robot based on jumping stability. *Acta Mechanical Engineering, 59(5), 41–52.
[3]. Banaszek, A. (2024). Calculations of Performance Characteristics of Submerged Cargo Pumps with Hydraulic Drive and Constant Torque Controllers. Energies, 17(22), 5592.
[4]. Roberts, T. J., Konow, N., & Gabaldón, A. M. (2021). Energy savings in animal locomotion: Elastic mechanisms in tendon and muscle. Nature Communications, 12(1), 1234.
[5]. Liu, X., Ding, S., Wang, F., Shi, Y., Wang, X. H., & Wang, Z. G. Controlling Energy Dissipation during Deformation by Selection of the Hard-Segment Component for Thermoplastic Polyurethanes. Industrial & Engineering Chemistry Research, 2022, 61 (25), 8821-8831.
[6]. Chen Q, Guerrero JM. Advanced Model Predictive Control Strategies for Energy Management in Microgrids. IEEE Transactions on Industrial Electronics. 2020;67(12):10070-10080. DOI: 10.1109/TIE.2020.2977996
[7]. Zhang, J., Song, G., Li, Y., Qiao, G., Song, A., & Wang, A. A bio-inspired jumping robot: Modeling, simulation, design, and experimental results. Mechatronics, 2013, 23 (8), 1123-1140. DOI: 10.1016/j.mechatronics.2013.09.005
[8]. Yan, Y., Shui, L., Liu, S., Liu, Z., & Liu, Y. (2021). Terrain Adaptability and Optimum Contact Stiffness of Vibro-bot with Arrayed Soft Legs. Journal of Soft Robotics, 10.1089/soro.2021.0029.
[9]. Kubo, K., & Ikebukuro, T. (2019). Changes in joint, muscle, and tendon stiffness following repeated hopping exercise. Physiological Reports, 7(19), e14237. https://doi.org/10.14814/phy2.14237
[10]. Li, Gen, Chi, Weiqian, Wang, Wenjing, Liu, XiHuan, Tu, Huan, Long & Xu (2024). High-cycle fatigue behavior of additively manufactured Ti-6Al-4V alloy with HIP treatment at elevated temperatures. INTERNATIONAL JOURNAL OF FATIGUE, 184. DOI:10.1016/j.ijfatigue.2024.108287.