






1. Introduction
At the rapidly science developing period, UAVs have been extensively used in military industrial and civilian applications. In production operations or some investigation missions, UAVs can carry electronic equipment to perform repetitive and high-risk tasks instead of humans. It has high flexibility, adaptability, and survivability without the risk of casualties [1]. However, due to the complexity of the environment and tasks, the working ability of a single UAV is relatively limited. Therefore, multi-UAV cooperation has also become an indispensable research direction. Trajectory planning and collision avoidance are the primary goals of multi-UAV cooperative assignments. Meanwhile, for reduce the operational burden and make trajectory planning more reasonable, the existing UAV collaborative plan needs to be further updated and improved [2].
Recently, lots of scholars conducted a number of research on this issue and proposed many feasible path planning algorithms. For example, the grid method [3], the A-star and its improved algorithm [4], the APF method, and the neural network algorithm [5]. The grid method can quickly decompose the planning space into grid elements with binary information, so that heuristic algorithms, such as the A*algorithm, can be used to search for safe paths in the elements later. Neural network algorithms can quickly generate obstacle avoidance paths through learning networks under fixed environments. However, these methods are either complex or computationally intensive and are not suitable for UAVs. The APF approach is capable of real-time control and has a quick calculation time and straightforward mathematical mechanism. As a result, it may be more effectively applied for designing UAVs' static and dynamic routes. One research introduces chaos theory into the APF function to study the route planning algorithm of UAVs [6]. The standard APF approach for trajectory planning of UAVs searches a set of optimal solutions for the repulsive field coefficients and gravitational field coefficients and incorporates them into the repulsive force function and gravity function. Through simulation and theoretical analysis, the optimized artificial thermal field algorithm using chaos theory can effectively solve the problems of local minimum points and unreachability of targets that UAVs are prone to encounter in the path planning process using APF method. UAVs can effectively conduct path planning in complex environments, reduce flight costs, reduce trajectory time, and improve the accuracy of UAV path planning. Research proposes adding conflict resolution methods to potential functions to work out the cooperative collision avoidance issue among cooperative UAVs [7]. Finally, the particle model agent is used to simulate and verify the above improved algorithms to achieve multiple aircraft formation and obstacle avoidance and collision avoidance issues. Zhang proposes a strategy of dynamically changing the step size of UAVs, dynamically adjusting the step size of movement based on the relative change value between directional angles, effectively avoiding the problems existing in the APF during the route planning process [8]. At the same time, for optimizing the function parameters in the APF, a genetic algorithm is added to the optimal parameters in setting the potential field function parameters [9]. By setting the optimal parameters, the problem of local minimum points in the track planning process can be effectively avoided. The improved APF method has effectively avoided the shortcomings of traditional algorithms and can effectively carry out route planning through practical verification [10]. An enhanced APF regression search method is suggested, which can successfully resolve the path planning problem, provide a local optimal path, and address the issues of local minimum and target unreachability [11].
In most 3D path planning scenarios, the objective is to design the route from the starting to the target with the least amount of energy used, while also realizing dynamic obstacle avoidance and many UAVs cooperating in the path and taking potential issues into account. Therefore, this article proposes an UAV route planning algorithm based on the APF method, which could plan a more suitable trace for UAVs.
2. Traditional APF method
The fundamental idea of the APF is to construct a virtual APF, where the gravitation is produced by the target (in the direction directed by the drone towards the target) and the repulsive field generated around the obstacle (in the direction directed by the obstacle towards the drone) work together to ultimately search for a collision free trajectory in the direction of potential field descent under the superposition of the gravitational and repulsive force field, as shown in Figure 1.
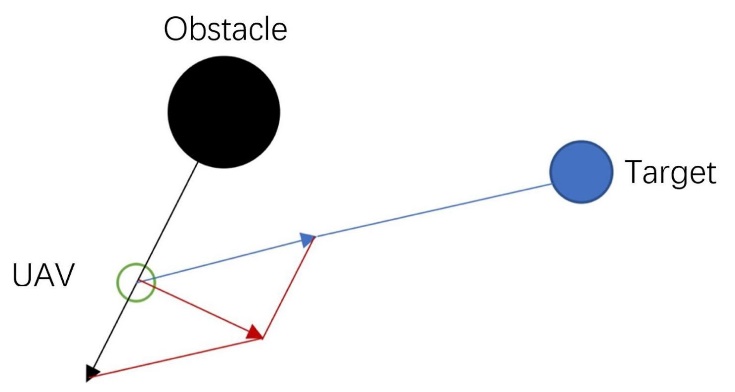
Figure 1. The schematic diagram of UAV force in APF.
From above, establish a coordinate system and calculate it using positional coordinates:
The attraction field function is
\( {U_{att}}(X)={k_{att}}{({X_{u}}-{X_{g}})^{2}} \) (1)
The corresponding gravity received by the drone is:
\( {F_{att}}=-∆{U_{att}}(x) \) (2)
The repulsion field function \( {U_{rep}} \) is
\( {U_{rep}} (x)= \begin{cases} \begin{array}{c} {k_{rep}}{(\frac{1}{({X_{u}}-{X_{ob}})}-\frac{1}{{ρ_{0}}})^{2}} , ({X_{u}}-{X_{ob}}) \lt {ρ_{0}} \\ 0 , ({X_{u}}-{X_{ob}})≥{ρ_{0}} \end{array} \end{cases} \) (3)
The corresponding repulsive force Frep received by the UAV is:
\( {F_{rep}}=-∆{U_{rep}}(x) \) (4)
The resultant force Ftotal on the UAV is:
\( {F_{total}} = {F_{att}} + \sum _{i=1}^{n}{F_{repi}} \) (5)
Above all, ∆ \( \) is the unit vector symbol, \( ({X_{u}}-{X_{g}}) \) is the Euclidean distance between the drone and the target, \( {X_{u}}({x_{u}},{y_{u}},{z_{u}}) \) is the current position of the drone, \( {X_{g}}({x_{g}},{y_{g}},{z_{g}}) \) is the coordinate position of the target point, and \( {k_{att}} \) is the gravitational gain coefficient. \( {k_{rep}} \) is the repulsive force gain coefficient \( {X_{ob}}({x_{ob}},{y_{ob}},{z_{ob}}) \) is the coordinate position of the obstacle, \( ({X_{u}}-{X_{ob}}) \) is the Euclidean distance between the UAV and the obstacle, ρ0 is the obstacle influence radius.
Complement: Euclidean distance can express the true distance between two points in 3D space. If there is \( {X_{1}}({x_{1}},{y_{1}},{z_{1}}) , {X_{2}}({x_{2}},{y_{2}},{z_{2}}) \) , there is
\( ρ=\sqrt[]{{({x_{2}}-{x_{1}})^{2}}+{({y_{2}}-{y_{1}})^{2}}+{({z_{1}}-{z_{2}})^{2}}} \) (6)
The basic APF algorithm can achieve approximate path planning, but in the actual control process, there may be some special situations. The primary issue with classic APF models is target unreachability, which refers to the potential for a UAV to enter a local potential energy minimum point before reaching the target. As obstacles occur close to the goal point and the drone advances in that direction under the gravitational force of the target point, traditional APF models do not take these force variations into account, but due to the relatively close obstacles, it also receives a considerable repulsive force. If the repulsive force of the drone is greater than the attractive force when approaching the target point, the drone will arrive the impact point unsuccessfully; secondly, if an obstacle appears between the target point and the drone and is collinear to both of them, it will also appear unreachable.
3. Improved method
In the above basic algorithm, the gravitational function is mainly affected by the location of the target point. However, due to the existence of zero potential energy points and points where the gravitational potential energy or repulsive potential energy is too large during the UAV's travel process.
In order to solve such problems, this method is established from a third person perspective during the UAV's path planning. Firstly, the trajectory of the UAV is pre-planned. The generation and selection of the pre-planned path is based on RRT. By the detection of collisions between sampling sites in state space, the target path is generated through backtracking, and the pre-planned path is divided into continuous particles, based on which intermediate path points are generated. When the drone falls into the local minimum, a closer waypoint provides a gravitational force to help the drone escape the local minimum. At the same time, taking into account the separation between the drone and the obstruction and the radius of obstacle itself, dynamically adjust the gravitational and repulsive coefficients, set up a non-gravitational zone around the obstacle, which is beneficial for the drone to avoid the obstacle, and set up a repulsive limited action zone to reduce unnecessary turns in the trajectory to achieve the effect of path optimization.
3.1. Generation of pre-planned path
The original RRT technique creates a random expanding tree by adding leaf nodes at random intervals and using a starting point as the root. The route from the beginning to the target will be found through the random tree by using backtracking strategy when a leaf node in the random tree contains a target point or enters a target region. This method's distinctive ability to swiftly and thoroughly explore high-dimensional space, direct the search to a blank area using random sample points in the state space, and thereafter identify a predetermined route between the beginning and target. It is appropriate to solve route planning in complex and dynamic environments (this process shows as Figure 2).
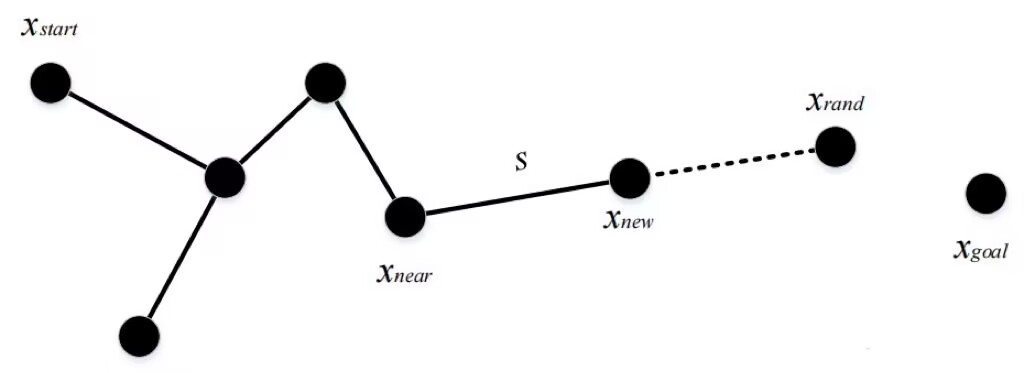
Figure 2. The schematic diagram of RRT.
Step 1 Establish a tree with the root node as the initial point and specify the target;
Step 2 Read map data;
Step 3 Obtain a point on the map randomly and record it as p_rand;
Step 4 Read the current entire tree, find the point closest to the random point, and record it as p_near;
Step 5 By p_near random point p_rand expands the distance by one step, recording the step as Delta, and the expanded point as p_new;
Step 6 Detect this p_new is there or not point on the obstacle. If it is on the obstacle, it will jump out of this cycle and restart from step 3;
Step 7 Place the newly generated point p_new into the entire tree;
Step 8 When the separation between p_new and the goal is less than a certain range, exit the search and generate a complete path.
3.2. Improvement on influence coefficient
Under the pre-planned path, a new APF function is established. The potential field coefficient has a significant impact on the optimization of the trajectory. When the gravitational coefficient is set too large or the repulsive force coefficient is set to limit, traditional APF methods will not be able to avoid obstacles; if the gravitational coefficient is set too small or the repulsive force coefficient is set too large, it can lead to unnecessary curvature of the trajectory or inability to converge to the target point. This article dynamically adjusts the gravitational and repulsive coefficients based on the separation from the drone to the barrier and the influence radius of the barrier, and sets the unmanned gravitational radius near the obstacle, which is beneficial for the drone to avoid the obstacle. At the same time, a limited radius of repulsion is set to reduce unnecessary turning maneuvers in the trajectory. Meanwhile, ensure a smooth transition and construct a new gravitational field function:
\( {U_{att}} (x) = \frac{1}{2} {k_{att}} η{ ({X_{u}} -{X_{g}} )^{2}} \) (7)
\( η=\begin{cases} \begin{array}{c} \frac{1}{2}[sin(\frac{ ({X_{u}} -{X_{g}} )-{R_{0}}}{{ρ_{0}}}·π-\frac{π}{2})+1] , {R_{0}}≤({X_{0}}-{X_{u}}) \lt {R_{0}}+{ρ_{0}} \\ 1 , ({X_{0}}-{X_{u}})≥{R_{0}}+{ρ_{0}} \end{array} \end{cases} \) (8)
Where, η is a dynamic gravitational factor with a range of action in the gravitational transition zone, reflecting the intensity of the drone reaching the target, \( {R_{0}} \) is obstacle radius.
The repulsion field function is:
\( {U_{rep}} (x)= -λ {k_{rep}}{(\frac{1}{({X_{u}}-{X_{ob}})}-\frac{1}{{ρ_{0}}})^{2}} \) (9) \( λ=\begin{cases} \begin{array}{c} \frac{1}{2}[cos(\frac{ ({X_{u}} -{X_{g}} )-{ρ_{0}}}{{ρ_{0}}}·π)+1] , {ρ_{0}}≤({X_{0}}-{X_{u}}){≤ρ_{1}} \\ 0 , ({X_{0}}-{X_{u}})≥{ρ_{1}} \end{array} \end{cases} \) (10)
Where \( λ \) is the dynamic repulsive force factor, and the range of action is the repulsive transition zone, reflecting the urgency of UAVs avoiding obstacles, \( {ρ_{1}}=2{ρ_{0}} \)
The schematic diagram of the potential field action region obtained from the above formula is shown in the following Figure 3(the region constituting the radius \( {R_{0}} \) is an obstacle without gravity inside; the region constituting the radius \( {ρ_{0}} \) is a gravitational transition region, the region constituting the radius \( {ρ_{1}} \) is a repulsive transition region, and the region outside the radius \( {ρ_{1}} \) is a non repulsive region):
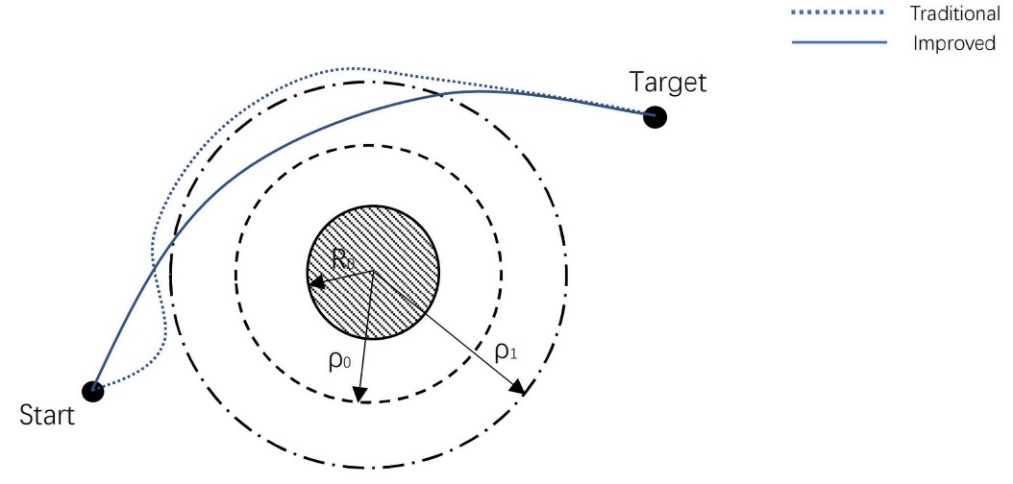
Figure 3. The schematic diagram of potential region.
Based on the equation, the resultant force applied to the motion of an object can be obtained, and the resultant force is projected onto the normal direction of velocity. Based on this, the velocity direction can be changed to achieve real-time update of the heading angle, achieving the effect of changing the direction of motion and avoiding obstacles.
4. Simulation results
In order to verify the effectiveness of the above algorithm, simulation was conducted on a computer based on Matlab2016b. Seven obstacles were set, with a gravitational coefficient of 5, a repulsive coefficient of 3, and an obstacle impact radius of 0.5m:
First, the RRT generates a pre-planned path, and generates a random tree from the starting point to the destination through random sampling. Then, the RRT pre planned path is filtered through backtracking, as shown in the red track in Figure 4:
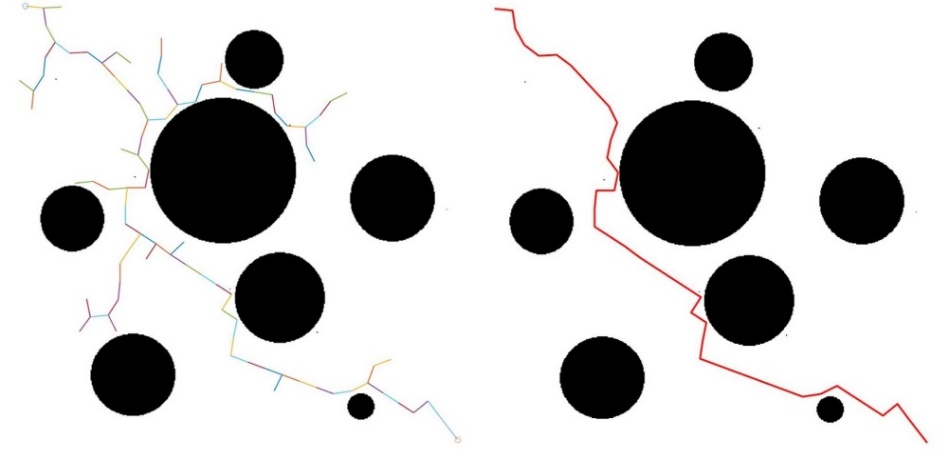
Figure 4. The route of RRT pre-planning.
Based on the obtained pre-planned path and the updated APF algorithm, the traditional APF algorithm and the improved APF algorithm are used to generate a planning route under a same obstacle map, and then placed in the same map for comparison, as shown in Figure 5(dotted line refers to the traditional APF method planning route; solid line refers to the improved planning route):
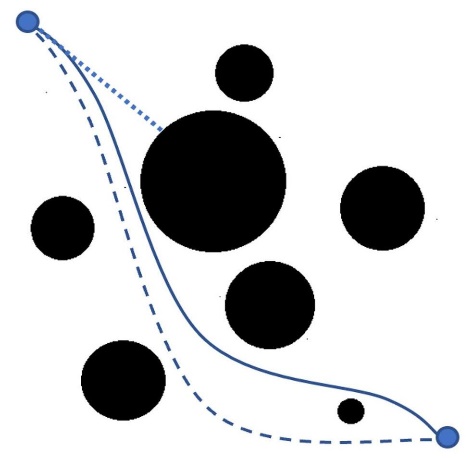
Figure 5. The simulation of traditional, guidance by pre planning path and improved APF method.
In the above flight environment, UAV needs to fly from the starting point to the target point in a constant speed, using traditional APF methods, respectively. The APF method based on pre-planning route proposed in this paper and a coefficient optimization of the traditional APF method are used for path planning. The advantages of the improved algorithm can be clearly seen from the simulation diagrams of the three algorithms. Firstly, when conducting path planning on a given map based on the traditional APF method, there is an obstacle located on the line from the starting point to the target point, which causes the drone to fall into shock when running to the obstacle and cannot continue to move forward (as shown by the trajectory shown in the dotted line above); After generating a preplanned path based on RRT, the path is used to guide the drone at the shock point, helping the drone to shake off the shock and move forward smoothly (as shown in the dotted line above); At the same time, this article has adjusted the gravitational and repulsive coefficients of traditional APF functions, which can further optimize the path of UAVs and successfully reach the target point through a narrower but faster path (as shown by the trajectory shown in the solid line above).
5. Potential on cooperative planning for multiple UAVs
Multi UAV collaborative planning can better adapt to complex and variable mission environments. In order to ensure the flight safety of UAVs, it is necessary to study the dynamic collision avoidance trace planning algorithm for multiple UAVs based on the status information of multiple UAVs on the basis of single aircraft path planning. The goal is to ensure that multiple UAVs do not collide with each other during navigation, and successfully pass through randomly moving obstacles to reach the designated target point.
5.1. Basic ideas
Designate multiple drones to take off at the same time. To avoid collisions, it is necessary to ensure a safe distance between drones. During the process, UAV may encounter randomly moving obstacles. At this time, it is considered to collect the required environmental information through sensors in real time, conduct real-time communication with multiple UAV, and achieve cooperative track planning for multiple UAVs.
5.2. No collision constraints
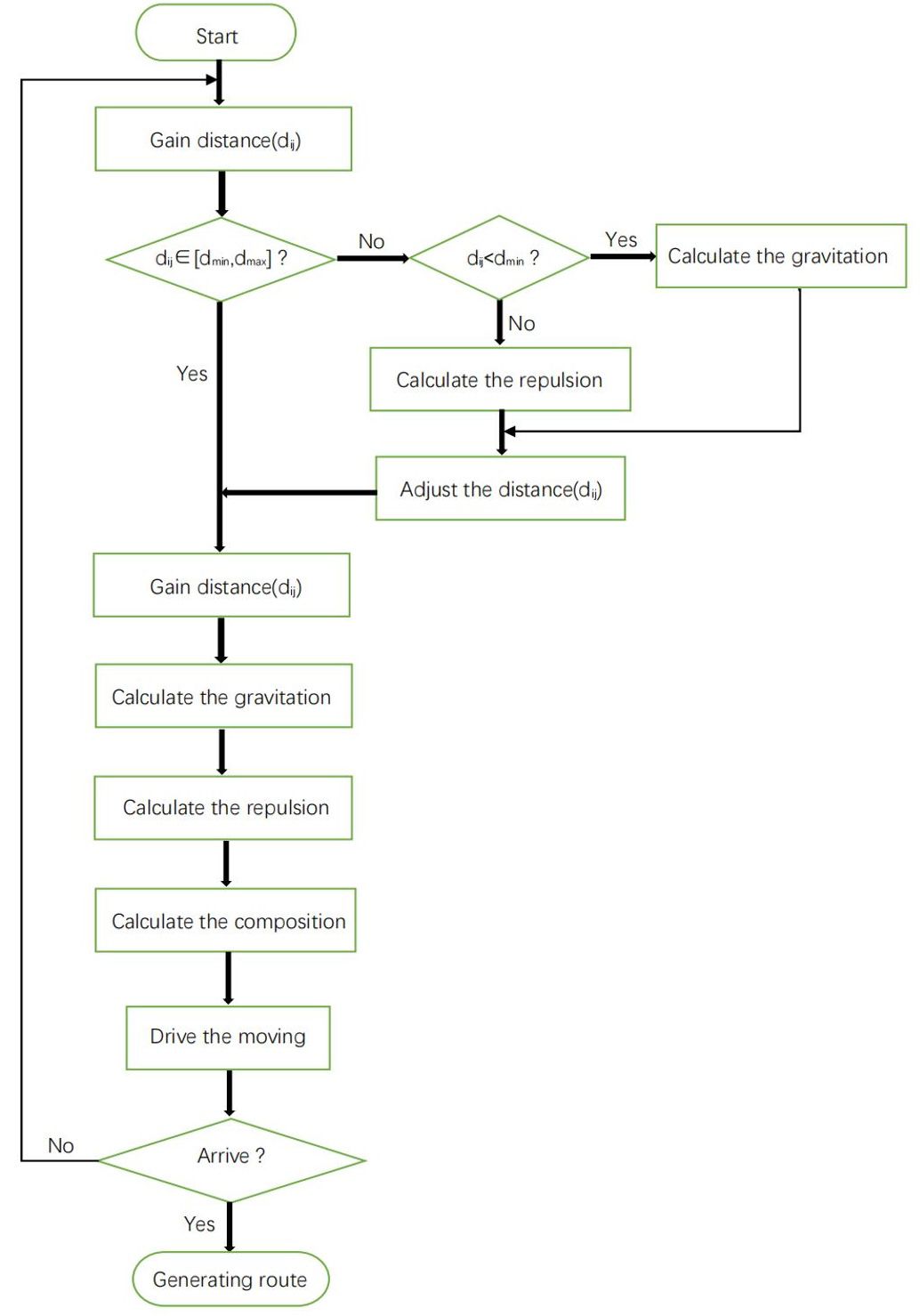
It is necessary to ensure that a certain safety distance is maintained between UAVs and there is no collision within this distance. First, define the safety distance interval between UAVs as \( [{d_{min}},{ d_{max}}] \) . If the distance between two UAVs: i and j is defined as \( {d_{ij}} \) , then for any \( {d_{ij}} \) , \( \lbrace {d_{ij}} | {d_{ij}}∈[{d_{min}},{ d_{max}}]\rbrace \) should be satisfied:
When \( {d_{ij}} \lt {d_{min}} \) , collision problems may occur between UAVs. At this time, in a virtual potential field environment, a repulsive force field needs to be generated between UAVs to drive them away from each other and prevent collision. Until the distance \( {d_{ij}} \) between UAVs is within the safe distance interval \( [{d_{min}},{ d_{max}}] \) , the repulsive force function between UAVs disappears;
When \( {d_{ij}} \gt {d_{max}} \) , in order to ensure timely collaboration and communication in a virtual potential field environment, attraction between drones drives drones to approach each other until the distance between drones returns to a safe range, and the gravitational field function between drones disappears.
The process for considering cooperative flight of multiple UAVs is shown in Figure 6.
| Figure 6. The flow chart of cooperative planning for multiple UAVs. |
6. Conclusion
Based on traditional APF method, this essay proposes a fresh route planning algorithm for UAVs. RRT is used to produce a pre-planning route in advance to solve the local minima problem of the generic APF algorithm. The gravitational and repulsive coefficients of the APF function for further enhancements on overcoming local minima and achieving trajectory optimization. Based on the result of simulation, trajectories generated based on this method are more suitable for UAVs.
At the same time, the cooperative flight of multiple UAVs in the process is considered to achieve a more complete planning. In the future, the speed, the energy consumption and many other aspects are also need to be improved for the better UAV’s path planning.
References
[1]. L. C. Shen, 2003 Theories and Methods of Autonomous Cooperative Control for Multiple UAVs, vol. 1, 1st ed. Beijing, China: National Defence Industry Press, 2003, pp. 1–25.
[2]. I. Maza, F. Caballero, J. Capitan, J. R. 2011 Martinez-de-Dios, and A. Ollero, A distributed architecture for a robotic platform with aerial sensor transportation and self-deployment capabilities J. Field Robot., vol. 28, no. 3,pp. 303–328, May 2011.
[3]. Han, G. L. 2021. Automatic parking path planning based on ant colony optimization and the grid method. Journal of Sensors, 2021, 1-10..
[4]. Silva J B B,Siebra C A, Nascimento T P D. 2016 A new cost func-tion heuristic applied to A* based path planning in static and dunamic environments. Arlington; Latin American Robotics Symposium,IEEE.
[5]. Wang W. Research and application of path planning method for multi robot based on multi agent system University of Electronic Science and Technology of China, 2015.
[6]. Zhen R, Zhen B S, Wu X L. An Algorithm for UAV Path Planning Based on Artificial Potential Field.Hebei University of Science and technology, 2017, 38(3): 513-522.
[7]. XU, X., WANG, M., and MAO, Y. 2020. Path planning of mobile robot based on improved artificial potential field method. Journal of Computer Applications, 40(12), 3508.
[8]. Zhang D F, Liu F 2013 Research and development trend of path planning based on artificial potential field method. Computer Engineering & Science, 25(6):83-97.
[9]. Shen Yongzeng, Chen Rui, Huang Haigang 2013 Vehicle naviga-tion path planning based on genetie neural network. Computer System Applications, 22(8) :210 -213.
[10]. Perazzo P, Sorbelli F B, Conti M, et al 2017 Drone Path Planning for Secure Positioning and Secure Position Verification. IEEE Transactions on Mobile Computing, PP(99):1-1.
[11]. Oland E, Kristiansen R. 2013 Collision and terrain avoidance for UAVs using the potential field method. Aerospace Conference. IEEE, 2013:1-7.
Cite this article
Lu,X. (2023). Improved path planning method for unmanned aerial vehicles based on artificial potential field. Applied and Computational Engineering,10,64-71.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2023 International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. L. C. Shen, 2003 Theories and Methods of Autonomous Cooperative Control for Multiple UAVs, vol. 1, 1st ed. Beijing, China: National Defence Industry Press, 2003, pp. 1–25.
[2]. I. Maza, F. Caballero, J. Capitan, J. R. 2011 Martinez-de-Dios, and A. Ollero, A distributed architecture for a robotic platform with aerial sensor transportation and self-deployment capabilities J. Field Robot., vol. 28, no. 3,pp. 303–328, May 2011.
[3]. Han, G. L. 2021. Automatic parking path planning based on ant colony optimization and the grid method. Journal of Sensors, 2021, 1-10..
[4]. Silva J B B,Siebra C A, Nascimento T P D. 2016 A new cost func-tion heuristic applied to A* based path planning in static and dunamic environments. Arlington; Latin American Robotics Symposium,IEEE.
[5]. Wang W. Research and application of path planning method for multi robot based on multi agent system University of Electronic Science and Technology of China, 2015.
[6]. Zhen R, Zhen B S, Wu X L. An Algorithm for UAV Path Planning Based on Artificial Potential Field.Hebei University of Science and technology, 2017, 38(3): 513-522.
[7]. XU, X., WANG, M., and MAO, Y. 2020. Path planning of mobile robot based on improved artificial potential field method. Journal of Computer Applications, 40(12), 3508.
[8]. Zhang D F, Liu F 2013 Research and development trend of path planning based on artificial potential field method. Computer Engineering & Science, 25(6):83-97.
[9]. Shen Yongzeng, Chen Rui, Huang Haigang 2013 Vehicle naviga-tion path planning based on genetie neural network. Computer System Applications, 22(8) :210 -213.
[10]. Perazzo P, Sorbelli F B, Conti M, et al 2017 Drone Path Planning for Secure Positioning and Secure Position Verification. IEEE Transactions on Mobile Computing, PP(99):1-1.
[11]. Oland E, Kristiansen R. 2013 Collision and terrain avoidance for UAVs using the potential field method. Aerospace Conference. IEEE, 2013:1-7.