







1. Introduction
Powered exoskeletons are movable machines that are worn on users and detect and respond to their movements. They improve users' abilities, such as strength or speed, by using electric motors, hydraulic systems, and so on. The Hardiman was the first powered exoskeleton developed by General Electric Company in 1960 [1]. Following that, more and more powered exoskeletons have been developed, with the prospect of application in military, medical, manufacturing, and a variety of other fields. Powered exoskeletons predict human action intentions using a variety of control methods. The goal of this paper is to review the control strategies used by various powered exoskeletons, with a focus on the control method of sEMG (surface electromyography) signals.
The author reviews the literature and summarizes the development of control methods for powered exoskeletons thus far. Simultaneously, the author investigated a single control method, that of surface electromyography signals. The paper explained how surface electromyography signals are generated, how they are captured by the powered exoskeleton, and how they are processed by the powered exoskeleton.
The exoskeleton's perception of human motion intentions gradually shifts from passive to active. A powered exoskeleton, controlled by surface electromyography signals, senses directly from the source of human action, electrical muscle signals, in this case. These powered exoskeletons use sensors to capture electrical signals from the user's body surface and then analyze these electrical signals to create a model of muscle movement to construct the user's movement posture. The powered exoskeleton can perform corresponding actions to assist the user in achieving a specific goal based on the user's movement posture. Some powered exoskeletons that are controlled by surface electromyography signals are already on the market, and some of them are excellent.
This paper reviewed the literature and summarized the development of control methods for powered exoskeletons so far. Simultaneously, the author investigated a single control method, that of surface electromyography signals. Furthermore, the author described how surface electromyography signals are generated, how they are captured by the powered exoskeleton, and how they are processed by the powered exoskeleton.
By explaining the sEMG signal generation process, the paper demonstrates how to use sEMG signals to control the power exoskeleton, as well as the benefits and drawbacks of this type of power exoskeleton. This paper assists researchers in related fields in quickly understanding the working principle of the power exoskeletons controlled by sEMG signals in the current stage.
2. The development of powered exoskeletons
Powered exoskeletons, also known as powered suits, have a wide range of applications. They assist paralyzed patients in moving their limbs for the purpose of rehabilitation; in the military, they assist individual soldiers in carrying heavier weapons or better armor, so that soldiers' combat effectiveness or survival rate can be improved; and in logistics, they assist workers in transporting more goods at one time and reducing the weight burden of the workers, so that workers' efficiency is improved and their health is also guaranteed. Because today's robots are really not intelligent enough to do everything, powered exoskeletons would be ideal for all physically demanding jobs.
Powered exoskeletons currently face two major challenges: energy and control. Control determines the maneuverability of a powered exoskeleton device. Human movement intentions cannot be directly expressed through digital signals that machines can understand via exoskeletons. As a result, we must devise appropriate methods for converting human motion intentions into digital signals.
Control systems for powered exoskeletons were primitive at first. Taking Hardiman into account, the first powered exoskeleton produced by General Electric Company, t he primary goal of the powered exoskeleton Hardiman was to assist soldiers in walking and relieve fatigue caused by long-distance heavy marching. However, it did not accomplish this goal. Despite the fact that, according to the experimenter's description, lifting a 150-kilogram object was as simple as lifting a 6-kilogram object. However, because it weighs 682 kilograms and has 28 hydraulic joints, the soldiers' walking speed was reduced to 0.76 meters per second after wearing it. Inadequately, the wearer had to control each joint of this massive machine via a series of handles and buttons on the powered exoskeleton [1].
|
Figure 1. A photo of Hardiman in the experiment (In the photo, the researcher put his hand into Hardiman's hand and tried to move the arm of Hardiman) [1]. |

Hardiman represents the beginning of powered exoskeletons, but it demonstrates that powered exoskeletons cannot be operated using traditional mechanical control methods such as handles, buttons, or keyboards. These methods of control are inefficient and complex. Exoskeletons developed after Hardiman use various control methods to solve the problem.
People attempted to change the exoskeleton's control method after Hardiman. People specifically hope that the exoskeleton will be able to directly and spontaneously perceive the user's movement intention while the user is moving.
A common example is BLEEX [2], which stands for Berkeley Lower Extremity Exoskeleton. The University of California, Berkeley created this weight-bearing powered exoskeleton for the US military. A soldier wearing BLEEX can walk at 4.68 kilometers per hour while carrying an additional 34 kg of equipment. The goal of BLEEX is similar to that of the previously mentioned Hardiman, but it is clearly more practical. The BLEEX powered exoskeleton's legs and soles are outfitted with pressure sensors. The pressure sensor data is then processed by BLEEX's computer, which builds the user's gait based on the pressure data. It also employs algorithms to boost the overall sensitivity of the system for "prediction" purposes. As a result, BLEEX can detect almost in real time how much torque is required for each joint, as well as the user's pace and stride [3].
|
Figure 2. BLEEX powered exoskeleton and the experimenter who worn it (BLEEX debuted at UC Berkeley's Human Engineering and Robotics Laboratory in 2004. The experimenter was rigidly connected to the spine part of the BLEEX through a vest and rigidly connected to the foot of the BLEEX through shoes. The power unit and central calculator of BLEEX are located in the lower part of the entire backpack.) (More photos can be found at http://bleex.me.berkeley.edu) [2]. |

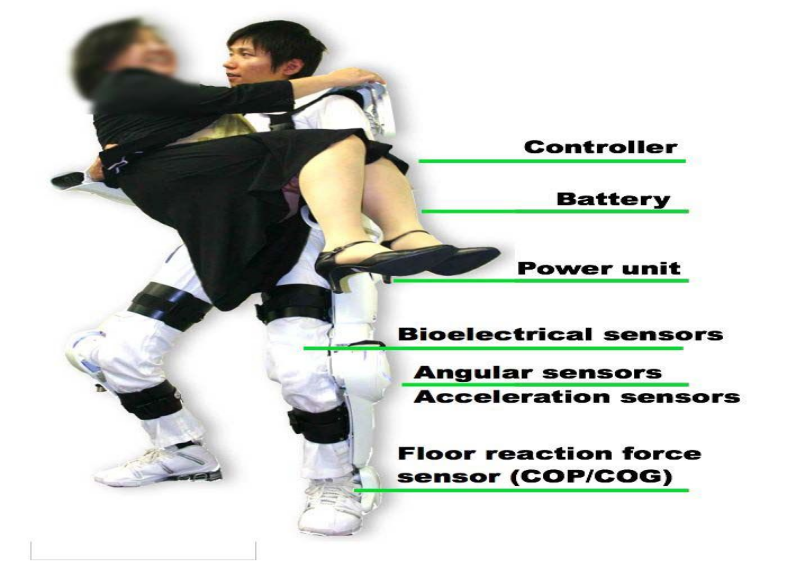
In comparison to BLEEX, the HAL exoskeleton developed by Professor Yoshiyuki Sankai of Japan's University of Tsukuba uses a more direct control method [4]. HAL, also known as Hybrid Assistive Leg, is primarily controlled by surface electromyography (sEMG). HAL was created to assist patients with stroke, hemiplegia, paraplegia, and amputees in regaining mobility. Because moving is difficult or impossible for these patients, the powered exoskeleton cannot judge their movement intention through their movements. Powered exoskeletons, on the other hand, can judge the user's movement intention by sensing these muscle electrical signals from the body surface because their motor nerves still exist and can generate muscle electrical signals [4].
|
Figure 3. The presenter using the HAL to lift a woman (It can be seen from the picture that HAL is a full-body exoskeleton that monitors the tester's surface EMG signals through electrodes) [4]. |
The control method used by HAL, namely the sEMG signals for control, will be investigated in this paper. This paper will first investigate the principle of muscle electrical signal generation, then explain how sEMG signals are detected, then introduce the sEMG signal processing method, and finally summarize the benefits and drawbacks of sEMG signals and look ahead to how to optimize the design of exoskeletons using sEMG signals in the future.
3. The generation of electrical muscle signals
All human motion intentions begin in the brain. The brain anticipates a goal and arranges the relevant muscles to contract or relax. The nervous system relays these arrangements to the muscles, and normally, a sequence of muscles responds, causing a human to produce an action that assists the brain in accomplishing the action it desires. For example, if someone wants to type his or her name "Ziji" on the computer, the brain will make the following deductions: " To type Ziji, you must press Z, I, J, I on the keyboard in that order". The Z must be capitalized, and you must also press the Shift key while pressing the Z. According to the memorized keyboard layout, the left little finger must press the Shift key, while the ring finger presses the Z key, and then the two fingers are lifted. Lift your right hand's middle finger and press the I button... Then, in order to complete this series of actions, someone must mobilize various muscles in his or her hands, such as contracting M.flexor digiti minimi... his or her mind finished in an instant. This series of complex thoughts and specific arrangements of muscle activity are transmitted to the hand muscles via nerves. The operator's muscles completed these movements, and his or her eyes saw the name "Ziji" appear on the computer, proving that the operator had successfully completed the task of "typing the name on the computer."
In this process, the brain's "arrangement" of muscles is pulsed electrical signals, which are transmitted through the Interneurons on the spine to the motor neurons in my hands, where motor neurons encode pulsed electrical signals, causing the muscles to contract or relax [5].
The brain's instructions are converted into neurotransmitters by neurons between each neural unit. Neurotransmitters are delivered to axonal cells, causing them to open and close the sodium-potassium pumps on their cell membrane on a regular basis, creating a potential difference inside and outside the axon cell membrane and forming a pulsing electric current. The current causes the next axon cell to release the corresponding neurotransmitter. The brain's instructions are thus transmitted to the motor neurons in the muscles via the continuous chemical reaction and current generation. Each motor neuron in a muscle receives the same neural signal, and when it reaches a threshold, it is activated to produce an electrical pulse. It can be considered as a circuit made up of stable batteries, capacitors, and small light bulbs, as illustrated in Figure 4.
|
Figure 4. A circuit consisting of stable batteries, capacitors, and small light bulbs (original). |
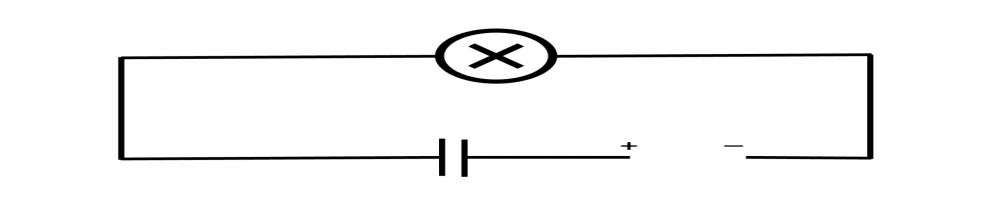
The light bulb will not turn on until the capacitor is fully charged. However, the threshold for neural signals varies by motor neuron, which means that the interval at which the threshold is reached varies by motor neuron. As a result, different motor neurons will produce different electrical impulses for the same nerve signal that interneurons previously transmitted. All of the electrical impulses combine to form a signal that controls the movement of the muscle. This signal tells the muscle whether it needs to contract or relax, as well as in what direction and with what force. At this point, the muscle serves as an actuator and amplifier, assisting the brain in achieving its goal. The induced current effect causes the electrical signal on the muscle to be transmitted to the body surface, and this portion of the electrical signal to the body surface is the surface electromyography signals, or sEMG signals.
4. Collection of surface electromyography signals for powered exoskeleton
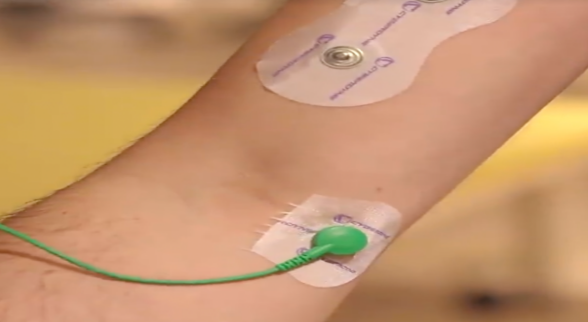
The current standard method for collecting sEMG signals is to place electrodes in specific locations on the skin. Suction cups or glue can be used to hold such electrodes in place. Using HAL as an example, electrodes are directly pasted on a specific location on the user's body surface, as shown in Figures 5 and 6. These locations have been pre-detected and are thought to be the best places to receive clear sEMG signals.
|
Figure 5. An experimenter demonstrating how to move the arm part of the HAL (When he bends his left arm, HAL's left arm bends accordingly. It can be seen that he has two electrodes attached to his left arm, which are connected to the HAL by two wires.) [6] |
|
Figure 6. A close-up of two electrodes on the left arm of the experimenter [6]. |

Since the best position for collecting sEMG signals on each person's muscles will differ slightly, users should generally adjust the placement of electrodes before use.
Similar sensors used to detect sEMG are extremely inexpensive. In general, if you play enough, you can get a set of sensors and A/D conversion modules for tens or even a few dollars.
There are also more practical sEMG signal collection methods. Consider the recently popular EMG wristbands depicted in Figure 7. They only detect sEMG signals produced by hand movements and must be worn around the wrist. Students are widely using such wristbands in various sEMG-related learning projects, and they may become an important component of the topic of "gesture control." However, the cost of wearing convenience may be relatively low sensitivity in comparison to patch-type sensors, and feedback may be delayed.
|
Figure 7. The MYO EMG wristband released by Thalmic Labs in Canada in 2013 able to detect EMG signals without sEMG patches [7]. |

5. Processing of powered exoskeleton for surface electromyography signals
As shown in Figure 8, the sEMG signals output directly from the muscle to the body surface are generally disorganized.
|
Figure 8. A typical sEMG signal detected by a sensor (It is pointless to input it directly into a computer. It does not carry information that the machine can understand) [8]. |
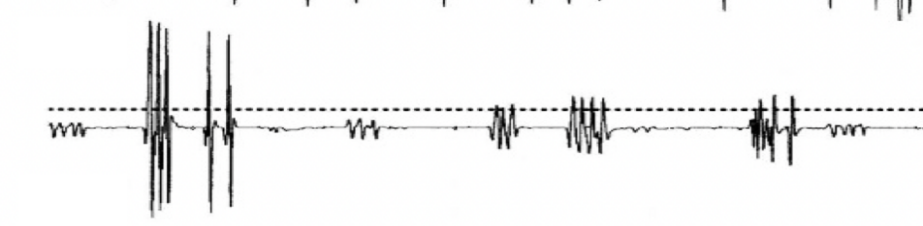
At the same time, because sEMG signals are so small, typically ranging from 1 to 10 millivolts, they are susceptible to power frequency interference. Electrical currents generated by electrical appliances operating in the environment can frequently cause significant disruption, not to mention that the sEMG signals we're discussing are used to control powered exoskeletons. The various sensors, effectors, processors, displays, and power supplies on the powered exoskeleton are sources of interference for them.
The author describes the processing of sEMG signals using Professor Yoshiyuki Sankai's HAL-3 processing method [8]. Professor Yoshiyuki Sankai's ideas are depicted in the figure below.
|
Figure 9. Schematic diagram shown by Yoshiyuki Sankai in the paper of HAL-3 [8]. |
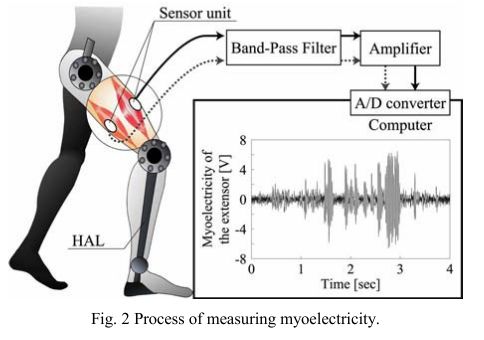
The original sEMG signals in HAL-3 are first passed through a band-pass filter (33-500Hz frequency band) to remove ambient high-frequency noise and useless low-frequency noise. Following that, the sEMG signals enter the amplifier, where the weak electrical signal is converted into a ±5V electrical signal. The amplified sEMG signal must also be processed using root mean square filtering, as follows [8]:
\( E(t)=\sqrt[]{(\frac{1}{T})\int _{t-T}^{t}{m^{2}}(t)dt} \) (1)
Among them, \( T \) is the sampling period, and \( m(t) \) is the sEMG signals after filtering and amplification [8].
The meaning of formula (1) is that in a sampling period, the root mean square (effective value) of \( m(t) \) is used as the control quantity \( E(t) \) , which is the same idea as using the effective value of alternating current, which is derived from the energy angle is equivalent. The frequency of the sEMG signals after band-pass filtering is up to 500Hz, so the sampling frequency must be at least 1kHz or more in order to obtain an undistorted sEMG signals [9].
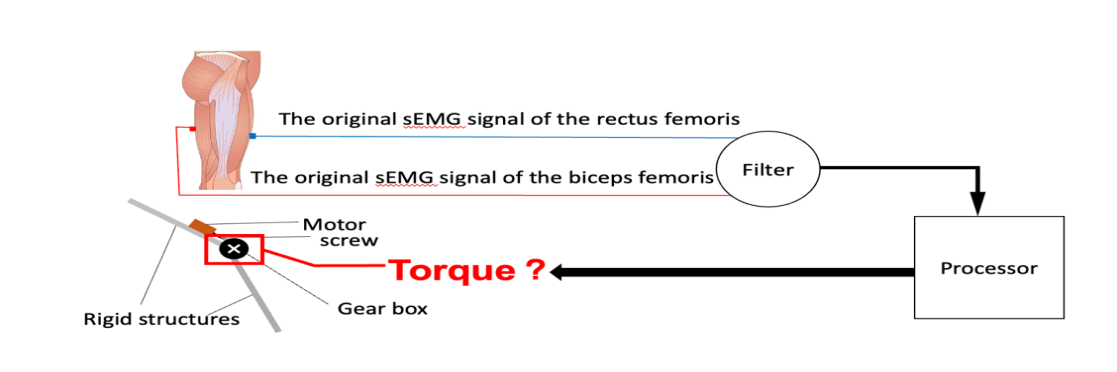
Then the sEMG signals is converted into a digital signal through A/D, and the estimated joint torque is output through the muscle-joint torque model. This process is performed online on a PC (Linux system). The muscle-joint moment model presented here simplifies the process of imitating human motion by powered exoskeletons. Because for humans, controlling a joint to rotate requires many muscles to work together. But with powered exoskeletons, turning a joint might just require hooking up a motor to the joint. Therefore, we only need to know the motion states of the muscles related to a joint and use them to obtain the moment of this joint and let the driver on the power exoskeleton directly apply the corresponding moment to its joint. By adjusting the multiple of this moment, the exoskeleton can amplify the user's strength. In Figure 10, the author briefly shows how HAL-3 determines how to move from the sEMG signal of the user's legs.
|
Figure 10. How HAL-3 determines how to move from the sEMG signal of the user's leg (original). |
6. Advantages and disadvantages of powered exoskeletons based on surface electromyography signals control
The sEMG signals are the physical manifestation of muscle electrical signals on the human body surface, and the electrical signals and muscle contractions occur almost simultaneously. As a result, the powered exoskeleton can obtain the most accurate and immediate perception of the user's movement intention via sEMG signals. Simultaneously, unlike BLEEX [2], which uses pressure sensor data to build a user's motion model, a power exoskeleton such as HAL-5 [4], which uses sEMG signals to build a user's motion model, does not require the user to be mobile. That gives patients with Muscular Dystrophy hope of being able to move again. At the same time, because the neuro-muscular system can be linked at different levels at will, paraplegic patients can directly transplant advanced nerves into muscles via nerve transfers, amplify muscle electrical signals via muscles, and then let powered exoskeletons collect sEMG signals, regaining the ability to exercise. Previously, they could only implant neural excuses or brain-computer interfaces, both of which carry a high risk of infection.
However, the drawbacks of powered exoskeletons controlled by sEMG signals are clear. First, as previously stated, because the best position for collecting sEMG signals on each person's muscles will differ slightly, users must generally adjust the placement of electrodes before use. This is obviously an impractical solution for mass production. Second, due to immature technology, most powered exoskeletons controlled by sEMG signals cannot completely filter out interfering signals and cannot clearly analyze sEMG signals, resulting in insufficient precision reading of powered exoskeletons and high latency, typically around 1 second, which is obviously inconvenient.
7. Discussion
Powered exoskeletons continue to struggle with perceiving human motion intent. However, combining the benefits of each product may not allow us to optimize them. Raytheon Company of the United States developed the power exoskeleton XOS2 hand structure, which uses the control scheme of handle + pressure sensor [10]. While moving the arm, the wearer uses the handle to correct the motion model created by the pressure sensor. Simultaneously, XOS2 has a sensitivity gain algorithm similar to BLEEX, which reduces the control delay almost to zero. A soldier wearing the XOS2 can easily lift a cannonball and even play football, as shown in figures 11 and 12.
|
Figure 11. Arm structure of XOS2 [11]. |
|
Figure 12. A soldier is using XOS2 to lift a missile [12]. |

Similarly, if the sEMG signal can be combined with other control schemes, the exoskeleton may be able to detect the user's motion intentions more accurately.
8. Conclusion
The powered exoskeleton's perception accuracy for the user's motion intention determines its work efficiency and the user's experience. Powered exoskeletons controlled by surface electromyography signals now hold great promise because they can be used for not only general power-assisted exoskeletons, but also for medical rehabilitation. However, there are numerous issues that must be addressed. Human life will be altered if these issues are resolved and the power exoskeleton industry is developed.
References
[1]. Fick, B. R., & Makinson, J. B. (1971). Hardiman I prototype for machine augmentation of human strength and endurance. GENERAL ELECTRIC CO SCHENECTADY NY SPECIALTY MATERIALS HANDLING PRODUCTS OPERATION.
[2]. Zoss, A., Kazerooni, H., & Chu, A. (2005, August). On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX). In 2005 IEEE/RSJ international conference on intelligent robots and systems (pp. 3465-3472). IEEE.
[3]. Kazerooni, H., Racine, J. L., Huang, L., & Steger, R. (2005, April). On the control of the berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the 2005 IEEE international conference on robotics and automation (pp. 4353-4360). IEEE.
[4]. Sankai, Y. (2010). HAL: Hybrid assistive limb based on cybernics. In Robotics research (pp. 25-34). Springer, Berlin, Heidelberg.
[5]. Robinson, D. A. (1989). Integrating with neurons. Annual review of neuroscience, 12(1), 33-45.
[6]. An experimenter demonstrating how to move the arm part of the HAL. (2020). https://zhuanlan.zhihu.com/p/115288318
[7]. The MYO EMG wristband released by Thalmic Labs in Canada in 2013 able to detect EMG signals without sEMG patches (2021). https://wearables.com/collections/thalmic-labs/products/myo
[8]. Sankai, Y. (2017). U.S. Patent No. 9,539,162. Washington, DC: U.S. Patent and Trademark Office.
[9]. Kawamoto, H., & Sankai, Y. (2002, July). Power assist system HAL-3 for gait disorder person. In International Conference on Computers for Handicapped Persons (pp. 196-203). Springer, Berlin, Heidelberg.
[10]. Mills, K. R. (2005). The basics of electromyography. Journal of Neurology, Neurosurgery & Psychiatry, 76(suppl 2), ii32-ii35.
[11]. Arm structure of XOS2, 2012. <https://www.ele.uri.edu/courses/bme281/F12/TimothyB_2.pdf>
[12]. “Hands On With The Sarcos XOS 2 – The Real Life Iron Man” <http://techcrunch.com/2010/09/27/sarcos-xos2-the-real-life-iron- man/>
Cite this article
Cheng,Z. (2023). Review on powered exoskeleton’s perception of human motion intentions. Theoretical and Natural Science,4,274-282.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Biological Engineering and Medical Science (ICBioMed 2022), Part II
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Fick, B. R., & Makinson, J. B. (1971). Hardiman I prototype for machine augmentation of human strength and endurance. GENERAL ELECTRIC CO SCHENECTADY NY SPECIALTY MATERIALS HANDLING PRODUCTS OPERATION.
[2]. Zoss, A., Kazerooni, H., & Chu, A. (2005, August). On the mechanical design of the Berkeley Lower Extremity Exoskeleton (BLEEX). In 2005 IEEE/RSJ international conference on intelligent robots and systems (pp. 3465-3472). IEEE.
[3]. Kazerooni, H., Racine, J. L., Huang, L., & Steger, R. (2005, April). On the control of the berkeley lower extremity exoskeleton (BLEEX). In Proceedings of the 2005 IEEE international conference on robotics and automation (pp. 4353-4360). IEEE.
[4]. Sankai, Y. (2010). HAL: Hybrid assistive limb based on cybernics. In Robotics research (pp. 25-34). Springer, Berlin, Heidelberg.
[5]. Robinson, D. A. (1989). Integrating with neurons. Annual review of neuroscience, 12(1), 33-45.
[6]. An experimenter demonstrating how to move the arm part of the HAL. (2020). https://zhuanlan.zhihu.com/p/115288318
[7]. The MYO EMG wristband released by Thalmic Labs in Canada in 2013 able to detect EMG signals without sEMG patches (2021). https://wearables.com/collections/thalmic-labs/products/myo
[8]. Sankai, Y. (2017). U.S. Patent No. 9,539,162. Washington, DC: U.S. Patent and Trademark Office.
[9]. Kawamoto, H., & Sankai, Y. (2002, July). Power assist system HAL-3 for gait disorder person. In International Conference on Computers for Handicapped Persons (pp. 196-203). Springer, Berlin, Heidelberg.
[10]. Mills, K. R. (2005). The basics of electromyography. Journal of Neurology, Neurosurgery & Psychiatry, 76(suppl 2), ii32-ii35.
[11]. Arm structure of XOS2, 2012. <https://www.ele.uri.edu/courses/bme281/F12/TimothyB_2.pdf>
[12]. “Hands On With The Sarcos XOS 2 – The Real Life Iron Man” <http://techcrunch.com/2010/09/27/sarcos-xos2-the-real-life-iron- man/>