






1. Introduction
In recent years, with the continuous development of vehicle technology, the number of missions in multi-media environments has been increasing, and vehicles that can only work and operate in a single-media environment can no longer meet the mission requirements. At the same time, the increasing anti-missile capability of countries around the world and the emergence of new modes of warfare have limited the strike programme of single-medium vehicles and placed higher demands on their ability to conduct cross-domain surprise attacks [1]. In order to make full use of the high maneuverability of air flight and the high stealth of underwater navigation, break the limitations of a single medium on the vehicle, and expand the application scenarios and working range of the vehicle, researchers have turned their attention to the trans-media vehicle with multi-environmental adaptive capability.
The concept of transmedia vehicles dates back to the 1920s and 1930s, however, due to the limited technology available at the time, none of the ideas proposed were translated into concrete engineering models. It was the Soviet Union's “flying submarine” programme [2], proposed before the Second World War, that really put the concept of transmedia vehicles into practice. At the same time, the United States was also interested in transmedia vehicles, the early development of which in the United States was closely linked to the military needs of the Navy. Driven by the U.S.-Soviet technology race, transmedia vehicle research gradually shifted from traditional manned military programmes to the unmanned domain. After entering the 21st century, the research of unmanned systems has been paid attention by various countries, and with the development of UAV technology, the technological concepts of these early transmedia vehicles can be continued in the field of UAVs, such as the Cormorant UAV designed by Lockheed Martin Company in 2005, the Sea Scout seaplane UAV designed by Oregon Iron Work in the United States in 2006 , and the Seagull series of drones designed by the United Kingdom in 2008. The emerging field of amphibious cross-media unmanned aerial vehicles (UAVs), which are able to flexibly switch between air flight and underwater navigation, has demonstrated great potential for application, especially in search and rescue, environmental monitoring, military reconnaissance, and other complex tasks, playing a unique role.


Figure 1: (a) Cormorant UAV. (b) Sea Scout seaplane UAV.
This paper analyses the characteristics and applications of water-air amphibious transmedia unmanned aerial vehicles (UAVs), and through researching the current research status of water-air amphibious transmedia UAVs at home and abroad, according to the classification of fixed-wing, rotor, and bionic aerial vehicles, it introduces the research progress of foreign countries since 2015 and focuses on the discussion of the research progress of the domestic research in the last few years, as well as the technical difficulties of water-air amphibious transmedia UAV research is analysed, finally, a summary and outlook are presented.
2. Characteristics and Applications of Water-Air-Amphibious Transmedia Unmanned Aerial Vehicles (UAVs)
The water-air amphibious trans-medium unmanned aerial vehicle (UAV) combines the speed advantage of aerial vehicles and the stealthy characteristics of underwater submersibles, and possesses the following distinctive features: (a) High adaptability: able to navigate alternately in water and air, which are two completely different mediums, breaking the limitations of traditional vehicles. (b) High concealment: through the free conversion between different flight modes, the amphibious cross-media unmanned aerial vehicle can effectively make use of the blind zones of detection equipment to break through the defense line quickly and stealthily. (c) Multi-mission capability: the high adaptability of aquatic-air amphibious trans-media UAV makes it possible to navigate in the air, on the surface of the water, and underwater, and it can also carry out a variety of tasks, so as to satisfy diversified operational and civil needs. (d) Rapid deployment capability: with the help of aerial flight capability, the aquatic-air amphibious trans-media UAV can quickly arrive at the designated area to carry out its operations, thus improving the efficiency of task execution.
Amphibious trans-medium unmanned aerial vehicles (UAVs) have a wide range of military and civilian applications [2]: (a) Military reconnaissance and strike: The water and air amphibious cross-media unmanned aerial vehicle has high adaptability to the environment, which can be maneuvered from underwater and can also fly close to the sea, and can effectively use the blind spot of detection equipment to achieve precision strikes. At the same time, the high stealth of the amphibious transmedia UAV makes it possible to fulfill the reconnaissance mission. (b) Maritime rescue and search: In the event of an accident, the water-air amphibious cross-media unmanned aerial vehicle (UAV) can quickly arrive at the scene to carry out rescue and search and rescue work without the need for multi-aircraft co-operation or formation co-operation [2], and a single aircraft can complete the task, thus improving the rescue efficiency. (c) Exploration of marine resources: Using the underwater diving capability of the amphibious transmedia unmanned aerial vehicle, marine resources can be explored and exploited, thus contributing to the development of the marine economy. (d) The water-air amphibious trans-media UAV can also test water quality, measure hydrometeorology, observe marine organisms, and other amphibious operational tasks.
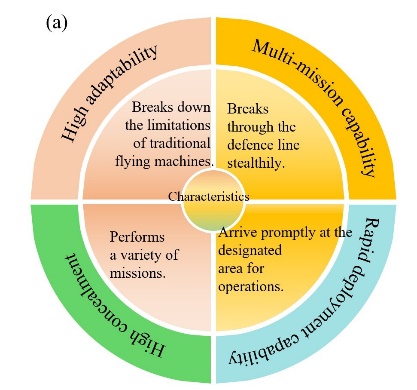
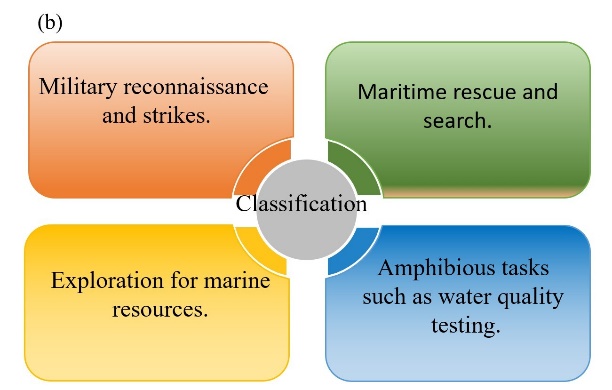
Figure 2: Characteristics and applications of aquatic-air amphibious trans-media unmanned aerial vehicles (UAVs).
In summary, with their unique characteristics and application advantages, water-air amphibious transmedia unmanned aerial vehicles will play an important role in more fields in the future. With the continuous progress and innovation of technology, this type of vehicle will bring more possibilities for human beings to explore and make use of ocean space.
3. Current research status at home and abroad
The research of water-air amphibious trans-media unmanned aerial vehicle involves many disciplines such as aerodynamics, hydrodynamics, material science, etc. Since it needs to navigate in two kinds of media, it requires to take into account the structure and shape, propulsion, navigation and communication, and other requirements, which makes it technically difficult. In terms of research in related fields, abroad started earlier and accumulated certain results, in contrast, domestic research is relatively late, and the corresponding research results are also more limited. Early domestic research was conducted on some principles, such as the research of the Chinese Academy of Sciences (CAS) on the anti-wave interference control system in 2011 [3], and the research of an organization in Kunming on the steering characteristics of water surface skipping in 2012 [4]. These early research efforts laid an important foundation for the subsequent development of water-air amphibious transmedia UAVs.
3.1. Abroad Research Status
3.1.1. Fixed wing
In 2016, Warren Weisler et al. solved the problem of conflicting densities of transmedia vehicles in air and water [5] by employing a water-immersible wing, as well as the use of an integrated spoiler and open wingtips in order to achieve rapid drainage. The designed test prototype has a wingspan of 1.5m, a length of 1.40m, and a weight of 56.05N, and uses brushless motors and propellers as drives, with two separate batteries to provide power. The test prototype is capable of multiple transitions for air, surface, and underwater operations, providing ideas for future research.
In 2018, William Stewart et al. from North Carolina State University proposed EagleRay [6], a fixed-wing water-air amphibious vehicle. Stewart designed exhaust ports on the wings, so that when the vehicle enters the water, water flows into the ports, counteracting buoyancy by increasing self-weight; When the wing is raised above the water surface, water flows out of the exhaust port. The propeller collided with the water when it entered the water resulting in greater damage, future work will design a folding propeller to solve this problem. Meanwhile, the vehicle dives by changing its own weight, which is less efficient and has poorer performance [7].
|
| |
Figure 3: EagleRay. | Figure 4: Test prototype developed by the National University of Singapore. |

In 2019, the Imperial College of London designed a transmedia vehicle for water-jet propulsion that generates thrust through explosions [8]. Water from the badlands is pumped through a small pump into a container containing calcium carbide, and this chemical reaction produces acetylene gas, which is mixed with air and ignited to explode. The reaction gives off a lot of heat and the temperature and pressure in the chamber rise rapidly which forces the water through a nozzle and out of the combustion chamber, creating the required thrust.
3.1.2. Rotary wing
In 2015, Marco Moreno Maia et al. designed an eight-axis multi-propeller unmanned aerial vehicle, the Naviator [9]. To achieve the water-air cross-media requirements, it uses different propulsion modes: in the air, it uses vertical propulsion mode to generate lift and thrust; in the water, it uses horizontal propulsion mode to generate thrust.
In 2018, Hamzeh Alzu'bi et al. proposed a water-air amphibious vehicle Loon Copter with active buoyancy control [10]. The design uses only four brushless DC motors for aerial propulsion and four propellers for underwater propulsion. The Loon Copter dives and floats without the use of propellers through a ballast system, a buoyancy control device, which improves the stability of the vehicle underwater and reduces power consumption. Underwater wireless communications and further weight reduction of the vehicle will be investigated in the future.
To further improve the transition of transmedia rotorcraft at the water-air interface, Yu Herng Tan et al. of the National University of Singapore proposed a scheme in 2019 [11]. The scheme adds a variability design to the quadrotor vehicle by changing the orientation of the rotor through a balanced tilt device to achieve the transition from airborne to underwater configurations. The current propulsion system for the prototype of this scheme in both media is an aerial propulsion system, and future work is needed to improve the underwater propulsion performance.
3.1.3. Bionic
The first insect-like UAV with aerial and aquatic capabilities was finally studied by a Harvard University group in 2015 [12]. The group compared flapping wing flight in air and water through 3D-CFD simulations and experiments, and found that good passive pitch could be obtained in both water and air using the same wing hinge design. In addition, the group demonstrated open-loop swimming in an aquatic environment using RoboBee. The bionic flapping wing provides a solution to problems such as spanning domains that exist in designing transmedia vehicles.
In 2016, Robert Siddall et al. designed a transmedia unmanned aerial vehicle modeled on a booby [13]. The vehicle is based on the boobies and uses folding wings that unfold to provide lift when flying over water, fold and dive and splash down into the water when entering the water, which is achieved by altering its aerodynamic behavior and reducing the impact loads as it falls into the water. In terms of propulsion, it still uses water-jet propulsion, but is equipped with propellers that work with the foldable wings to improve flight efficiency.
Table 1: Development history of transmedia unmanned aerial vehicles in foreign countries.
Year | Category | Name | Research organization | Promotion method | Special design |
2015 | Rotary wing | Naviator | Rutgers University | Aerial: vertical propeller. Underwater: horizontal propeller | Twin propeller system for media conversion |
2015 | Bionic | Insect-like unmanned aerial vehicle | Harvard University | Flapping Wing Drive | Powered by flapping wings |
2016 | Bionic | Skipjack transmedia unmanned aerial vehicle | Imperial College of London | Water jet propulsion, propeller for propulsion efficiency | Foldable wings modeled on boobies |
2016 | Fixed wing | Blackwing | American Aviation Environment Corporation | Propeller propulsion | Launchable from platforms such as submarines and UAVs |
2016 | Fixed wing | Fixed wing UAV | North Carolina State University | Brushless motor and propeller as drive | Submersible wings and open tips |
2018 | Rotary wing | Loon Copter | Oakland University | Aerial: four brushless motors. Underwater: four propellers | Depth control via ballast system |
2018 | Fixed wing | EagleRay | North Carolina State University | Water jet propulsion | Exhaust ports on the wing |
2019 | Rotary wing | Quadcopter transmedia | National University of Singapore | Rotor blades | Balanced tilt mechanism to change rotor orientation |
2019 | Fixed wing | New transmedia aerial vehicle | Imperial College of London | Explosive water jet propulsion | Explosive water spray through chemical reaction |
3.2. Domestic research status
3.2.1. Fixed wing
In 2011, Nanchang Hangkong University proposed two types of UAV models [14], both of which have hollow wings that can be rotated backward by 90°, and the drive modes used are all-electric and hybrid oil-electric drive, respectively. The all-electric test prototype is powered by a lithium battery, which drives propellers mounted under the tail and above the head of the fuselage for underwater and surface low-speed flight and air and surface high-speed flight, respectively. The oil-electric hybrid test prototype is powered by a piston engine for aerial flight and an electric motor for underwater navigation, but the test prototype still suffers from a lack of institutional rigidity during the wing transformation process.
In 2023 Peking University proposed a new trans-domain vehicle, code-named QianXiang II [15]. It can glide rapidly over water and then take off. QianXiang II is fitted with a foldable air propeller at the head, which opens during cross-domain liftoff to provide important power for the vehicle and is supplemented by water-jet propulsion. The back is fitted with foldable wings, which fold when navigating on the water surface, reducing navigational drag and space. Meanwhile, two sets of T-shaped hydrofoils are mounted on the belly of the vehicle. The combination of foldable wings and hydrofoils enables QianXiang II to have a larger load, a faster surface navigation speed, and a more stable landing process compared with ordinary cross-domain vehicles.
In order to solve the problems of high resistance and cross-domain difficulty in underwater navigation of fixed-wing vehicles, Harbin Engineering University proposed a fixed-wing UAV with foldable wings in 2023 [16]. Named Longbow II, the vehicle has a fuselage length of 1.95 m, a wingspan of 2.535 m, and a weight of 13.3 kg. It adopts a lightweight design and fills the interior with buoyant materials. The wings are trapezoidal in shape, which not only facilitates machining but also reduces induced drag.
In 2024, a new transmedia unmanned aerial vehicle (UAV) was proposed by the Dalian University of Technology [17]. The UAV is modeled on the characteristics of manta rays, and the typically elongated fuselage is changed into a flat fuselage, with the upper surface protruding more than the lower surface, which is similar to the design of a wing; at the same time, it is modeled on the characteristics of a flying fish entering and exiting the water, and the connection between the wing and the fuselage is changed into an extendable type so that the wing is extended from the inside of the fuselage in the air, and retracted in water, which reduces the impact and resistance of the wing when entering the water.
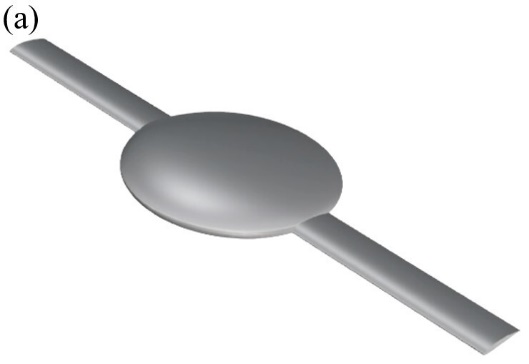
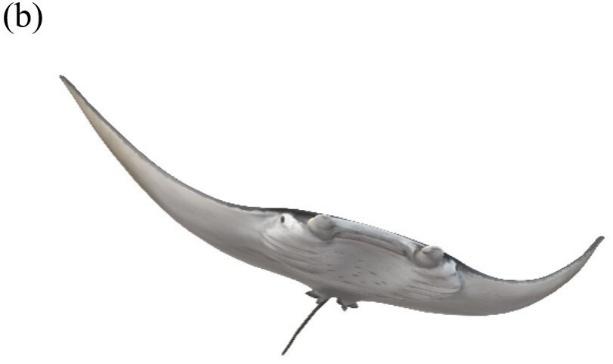
Figure 5: Comparison between the new transmedia unmanned aerial vehicle. (a) The new transmedia unmanned aerial vehicle. (b) Manta ray.
3.2.2. Rotary wing
In 2022, Ang et al. from Nanjing University of Aeronautics and Astronautics proposed a crossable water-air unmanned aerial vehicle with different operating morphologies in different work areas using the transition control of tilting propeller technology to achieve cross-domain [18]. The fuselage is designed with a rectangular triangular cross-section body in the lower part of the fuselage and an approximately rectangular cross-section body in the upper part of the fuselage which is more conducive to maintaining the stability of the navigator. Foldable and deployable wings are designed to meet the requirements of two different mediums: water and air. The unmanned aerial vehicle can take off and land vertically, which has a broad application prospect.
In 2022, Shanghai Jiao Tong University developed a small, lightweight amphibious unmanned aerial vehicle named Nezha-mini [19]. It weighs only 953 grams and has an A4 size. The unique "X+Δ" distribution gives the vehicle a good cross-domain flight capability. Although the two sets of thrusters greatly improve the vehicle's maneuverability in different media, they also increase the weight of the entire propulsion system, which will be further reduced in future work. The group then developed the Nezha-F [20], a vehicle with a folding and self-deploying arm. The folding and unfolding of the arm is achieved by a piston variable buoyancy system and a crank-slider mechanism. The folding and unfolding of the arm can reduce the resistance of Nezha-F when entering and navigating underwater and achieves the compatibility of airborne and underwater structures without adding too many actuators, which provides an idea for the miniaturization of this type of vehicle.
In 2023, Shanghai Jiao Tong University developed Nezha-IV [21], which focuses on solving the problem of vehicle operation in harsh environments. To solve this problem, the project focused on the robustness of the vehicle, adopting a multi-rotor layout and designing a streamlined buoyant material to provide the required buoyancy. The special layout provides the vehicle with six degrees of freedom of control, which increases the flexibility and agility of underwater operation, as well as provides stable operation under harsh natural environments.
In 2023, Wang et al. from Chang’an University proposed a water-air amphibious unmanned aerial vehicle called ABDragon [22], which can dive, fly in the air and float on the surface of the water. The vehicle is similar to a bamboo dragonfly in appearance, with a cylindrical layout, including a propulsion system, navigation and communication compartment, depth control compartment, flight control, and energy compartment. The design of the rotor system and the power system are also designed to ensure the continuity of the power system and the stability of the vehicle.
3.2.3. Bionic
In 2009, Beihang University developed a cross-media amphibious drone, the Flying Fish, which mimics flying fish and water birds [23]. The UAV refers to the variable density method of waterbirds entering water, and changes the self-weight control of diving or floating through the suction and discharge control of the built-in water pump; it also imitates the wings of the flying fish retracted when it enters the water, and designs a 90°back-swept wing, which can be retracted when it enters the water, so as to reduce the resistance of moving in the water.

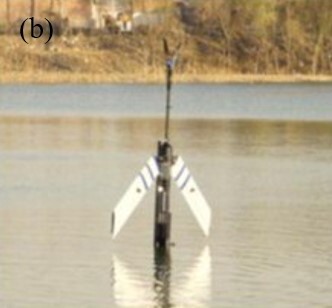
Figure 6: The process of Flying Fish entering and exiting the water. (a) Entering the water. (b) Exiting the water.
In 2019, Chen Huaiyuan of the Nanjing University of Aeronautics and Astronautics modeled on the swimming principle of stingrays and used the bionic annular pectoral fins as the underwater propulsion system [24], based on which he chose the culvert propeller system that matched it as the air propulsion system. At the same time, in order to achieve rapid strikes, the annular pectoral fins were added with a throw-away design, which can reduce the weight of the vehicle when needed and improve flight efficiency. Future research will further optimize the vehicle structure and control strategy.
Table 2: Development of domestic amphibious trans-medium unmanned aerial vehicles.
Year | Category | Name | Research organization | Promotion method | Special design |
2009 | Bionic | Flying Fish | Beihang University | Aerial: propulsion by twin propellers Underwater: advance by water jets | 90° rear swept wing, suction, and drainage for depth control |
2011 | Fixed wing | All-electric drive drones | Nanchang Hangkong University | Lithium battery-powered propeller propulsion | Hollow wing with 90° rearward rotation |
2011 | Fixed wing | Hybrid drive UAV | Nanchang Hangkong University | In the air: piston engine Underwater: electric motor | Hollow wing with 90° rearward rotation |
2019 | Bionic | Soft morphing fins | Beihang University | Flying Squid Water Jet Propulsion | Foldable and unfoldable soft deformation fins |
2019 | Bionic | Bionic annular pectoral fin transmedia vehicle | Nanjing University of Aeronautics and Astronautics | In the air: Culvert propeller Underwater: Bionic ring fins | Removable ring pectoral fin design |
2022 | Rotor wing | Water-air unmanned vehicle | Nanjing University of Aeronautics and Astronautics | Propeller Propulsion | Variable axis tilt propeller |
2023 | Fixed wing | QianXiang Ⅱ | Peking University | Aerial: Air propeller Not realized for underwater navigation | Combination of foldable wing and hydrofoil |
2023 | Fixed wing | Longbow Ⅱ | Harbin Engineering University | Aerial: air propeller Underwater: specially designed underwater propeller | Foldable trapezoidal wings, self-locking |
2023 | Rotor wing | ABDragon | Chang’an University | Co-axial rotor and motor | Large aspect ratio and rotating body design |
2024 | Fixed wing | New water-air amphibious vehicle | Dalian University of Technology | Propeller propulsion | Flat fuselage, hybrid wing design |
4. Technical difficulties
The density of water is more than 800 times that of air, the viscosity coefficient is 59 times that of air, and there are huge differences in physical properties such as thermal expansion and compressibility. The water-air amphibious cross-media unmanned aerial vehicle is not a simple superposition of airborne unmanned aerial vehicle technology and underwater submersible technology but needs to consider the shape and layout of the vehicle, power system, control strategy, structure and materials, and other aspects of technical requirements.
4.1. Structure and form design
Due to the large difference in the physical properties of the two media, water and air, the performance requirements for navigation in water and air are different. If the vehicle enters the water directly from the air, in order to reduce the lift generated by the wings to make the vehicle dive, it is necessary to reduce the angle of approach to zero lift angle, but it will increase the resistance of underwater navigation. To solve this problem, most of the vehicles adopt the variant technology, which adapts to the flight environment and improves the dynamic performance by actively changing the shape. Vehicle variants are mainly realized by deformation structures, which can be divided into two types of deformation structures: centralized-driven and distributed-driven [25]. Since the deformation process will change the aerodynamic layout, the aerodynamic changes are complicated, so it is necessary to make a careful study of its dynamic characteristics.
4.2. Conversion of water-air medium
The current test prototype enters the water by sliding into the water and splashing into the water and exits the water by catapulting out of the water, skidding for takeoff, rocket boosting out of the water, and propeller or high-pressure gas boosting out of the water [2]. From the viewpoint of water entry mode, although sliding into the water is more stable than splashing into the water, it takes a long time and is inefficient. Splashing into the water improves the water entry efficiency and distance but at the cost of facing a huge impact load, which puts forward the requirements on the structural strength of the vehicle. From the viewpoint of the water discharge method, the ejection water discharge, and skidding take-off ensure the stability of the vehicle at the same time to ensure that the vehicle has enough speed, and the other three water discharge methods need to be designed the relevant propulsion device, taking into account the jet speed and vehicle attitude control.
4.3. Dynamical system
In order to achieve air flight and underwater navigation, most of the current water-air amphibious trans-media unmanned aerial vehicles use two sets of independent propulsion systems for air propulsion and underwater propulsion, respectively, and take the engine and electric motor as the main power source [2], and the main propulsion mode of these two power sources is the spiral will be propelled, but also includes jet propulsion, flap-wing propulsion, rocket propulsion and so on. The traditional air flight and underwater propulsion systems are difficult to directly apply to trans-media vehicles, but also to face the problem of excessive weight, low propulsion efficiency, etc., so we should build the overall configuration of the power system applicable to multi-environmental media [1]; underwater and air propulsion systems require different energy sources, and different fuels lead to changes in the working conditions, so we need to study the combustion chamber technology can be adapted to a variety of fuels [1].
4.4. Materials and durability
The material properties of the water-air amphibious trans-media unmanned aerial vehicle, as a special vehicle capable of flying in the air and navigating in the water, are an important aspect of the design and manufacturing process. In terms of material selection, lightweight and high-strength materials should be chosen to ensure structural strength while reducing the weight of the vehicle. Selected materials also need to have corrosion resistance, to prevent seawater erosion leading to structural damage. For components that need to be sealed, such as batteries, the selected materials also need to be waterproof. In addition, deformation materials are of great importance for variant technology [26]. In order to enhance the durability of the vehicle, the impact loads during the transverse domain can be reduced by optimizing the water-air transition; the structural design can be optimized, for example, by designing streamlined wings and fuselage according to bionic principles; and the durability can be increased by adding redundancy to critical structures.
5. Conclusion
As a new type of unmanned system, the water-air amphibious transmedia unmanned aerial vehicle (UAV) has a broad application prospect in both military and civil fields. In this paper, according to the classification of fixed-wing, rotary-wing and bionic, the current research status of foreign water-air-amphibious transmedia unmanned aerial vehicles since 2015 is reviewed, and the domestic research progress in recent years is highlighted. At the same time, the technical difficulties of water-air amphibious transmedia UAVs are analyzed.
Current research shows that fixed-wing vehicles have excellent duration performance and aerodynamic efficiency, but the stability of their trans-domain process is a major challenge; rotary-wing vehicles have good maneuverability and stability, but their applications are limited by sailing speed and endurance. With the in-depth study of amphibious organisms such as flying fish, boobies, cormorants, flying squid and so on in nature, the future water-air amphibious trans-media UAVs can draw more on the body structure and characteristics of these organisms, and combine biomimetic technology with the water-air amphibious trans-media UAVs to tap the potentials of biomimetic water-air amphibious UAVs.
References
[1]. Tang, S., Zhang, B., Yue, C., Sang, C., & Guo, J. (2021). Analysis of key technology and flight dynamics research trend of trans-medium aircraft. Aerodynamic Missile Journal (pp. 7–13). no. 6, doi: 10.16338/j.issn.1009-1319.20210843.
[2]. Yang, X., Liang, J., Wen, L., & Wang, T. (2018). Research status of water-air amphibious trans-media unmanned vehicle. Robot (pp. 102–114). vol. 40, no. 1, doi: 10.13973/j.cnki.robot.170241.
[3]. Zhu, Y., Fan, G., & Yi, J. (2011). Modeling longitudinal aerodynamic and hydrodynamic effects of a flying boat in calm water. 2011 IEEE International Conference on Mechatronics and Automation (pp. 2039-2044). doi: 10.1109/ICMA.2011.5986240.
[4]. Li, J., Yang, A., & Su, L. (2012). Modeling and Simulation of Dynamic Characteristics of Slide Jump Steering Trajectory for Trans-media UAV. Torpedo Technology (pp. 401–406). vol. 20, no. 6.
[5]. Weisler. W., Stewart. W., Anderson, M. B., Peters, K. J., Gopalarathnam, A., & Bryant, M. (2018). Testing and Characterization of a Fixed Wing Cross-Domain Unmanned Vehicle Operating in Aerial and Underwater Environments. IEEE Journal of Oceanic Engineering (pp. 969–982). vol. 43, no. 4, doi: 10.1109/JOE.2017.2742798.
[6]. Stewart, W., Weisler, W., MacLeod, M., Powers, T., Defreitas, A., Gritter, R., Anderson, M., Peters, K., Gopalarathnam, A., & Bryant, A. (2018). Design and demonstration of a seabird-inspired fixed-wing hybrid UAV-UUV system. Bioinspiration & Biomimetics. vol. 13, no. 5, p. 056013, doi: 10.1088/1748-3190/aad48b.
[7]. Zhang, X., Xiao, H., Liu, X., Xing, K., & Lu, X. (2024). Design and Realization of a New Ducted Fan Water-Air Amphibious UAV. Acta Armamentarii (pp. 1–10).
[8]. Zufferey, R., Ortega Ancel, A., Farinha, A., Siddall, R., Armanini, S. F., Nasr, M., Brahmal, R.V., Kennedy, G., & Kovac, M. (2019). Consecutive aquatic jump-gliding with water-reactive fuel. Science Robotics. https://www.science.org/doi/10.1126/scirobotics.aax7330
[9]. Maia, M. M., Soni, P., & Diez, F. J. (2015). Demonstration of an Aerial and Submersible Vehicle Capable of Flight and Underwater Navigation with Seamless Air-Water Transition. ArXiv: arXiv:1507.01932. doi: 10.48550/arXiv.1507.01932.
[10]. Alzu'bi, H., Mansour, I., & Rawashdeh, O. (2018). Loon Copter: Implementation of a hybrid unmanned aquatic–aerial quadcopter with active buoyancy control. Journal of Field Robotics. https://onlinelibrary.wiley.com/doi/10.1002/rob.21777
[11]. Tan, Y. H., & Chen, B. M. (2019). Design of a Morphable Multirotor Aerial-Aquatic Vehicle. In OCEANS 2019 MTS/IEEE SEATTLE (pp. 1–8). doi: 10.23919/OCEANS40490.2019.8962867.
[12]. Chen, Y., Helbling, E. F., Gravish, N., Ma, K., & Wood, R. J. (2015). Hybrid aerial and aquatic locomotion in an at-scale robotic insect. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 331–338.). doi: 10.1109/IROS.2015.7353394.
[13]. Siddall, R., Ortega Ancel, A., & Kovaˇc, M. (2016). Wind and water tunnel testing of a morphing aquatic micro air vehicle. Interface Focus. https://royalsocietypublishing.org/doi/epdf/10.1098/rsfs.2016.0085
[14]. Liu, W. (2013). The diving plane design and the aerodynamic shape structural design and analysis. `.
[15]. Zou, Y., You, C., Tan, X., Wang, Y., Wang, J., Li, C., He, M., Lv, K., Zou, Y., Song, H., Lv, P., & Li, H. (2023). Design and implementation of a gliding cross-domain vehicle. Ocean Engineering, vol. 280, p. 114549, doi: 10.1016/j.oceaneng.2023.114549.
[16]. Sun, X., Cao, J., Li, Y., & Wang, B. (2024). Design and field test of a foldable wing unmanned aerial–underwater vehicle. Journal of Field Robotics (pp. 347–373). vol. 41, no. 2, doi: 10.1002/rob.22265.
[17]. Wang, W., Wang, L., Zhang, K., & Huang, Y. Lift–Drag Performance of a New Unmanned Aerial Vehicle in Different Media and Ground Effect. Journal of Marine Science and Engineering, vol. 12, no. 7, Art. no. 7, doi: 10.3390/jmse12071052.
[18]. Ang, H., & Wang, Y. (2022). Design and Control Technology of a Variable Axis Propeller Unmanned Vehicle Cross Region of Water and Air. Unmanned Systems Technology (pp. 1–11). vol. 5, no. 3, doi: 10.19942/j.issn.2096-5915.2022.3.022.
[19]. Bi, Y., Jin, Y., Lyu, C., Zeng, Z., & Lian, L. (2022). Nezha-Mini: Design and Locomotion of a Miniature Low-Cost Hybrid Aerial Underwater Vehicle. IEEE Robotics and Automation Letters (pp. 6669–6676). vol. 7, no. 3, doi: 10.1109/LRA.2022.3176438.
[20]. Bai, Y., Jin, Y., Liu, C., Zeng, Z., & Lian, L. (2023). Nezha-F: Design and Analysis of a Foldable and Self-Deployable HAUV. IEEE Robotics and Automation Letters (pp. 2309–2316). vol. 8, no. 4, doi: 10.1109/LRA.2023.3252343.
[21]. Jin, Y., Bi, Y., Lyu, C., Bai, Y., Zeng, Z., & Lian, L. (2023). Nezha‐IV: A hybrid aerial underwater vehicle in real ocean environments. Journal of Field Robotics. https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22274
[22]. Wang, C., Hui, Q., & Zhang, F. (2023). Design of water⁃air cross⁃domain multi⁃mode coaxial UAV. Acta Aeronautica et Astronautica Sinica (pp. 335–347). vol. 44, no. 21.
[23]. Yao, G., Liang, J., Wang, T., Yang, X., Liu, M., & Zhang, Y. (2014). Submersible unmanned flying boat: Design and experiment. 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014) (pp. 1308–1313). doi: 10.1109/ROBIO.2014.7090514.
[24]. Chen, H. (2020). The design and analysis of fluid dynamic characteristics for submersible unmanned aerial vehicle. Nanjing: Nanjing University of Aeronautics and Astronautics. doi: 10.27239/d.cnki.gnhhu.2019.001532.
[25]. Lu, Y., He, Z., & Lu, Y. (2008). Morphing Aircraft Technology. Aeronautical Manufacturing Technology (pp. 26–29). no. 22.
[26]. Feng, J., Hu, J., &Qi, D. (2019). Study on development needs and key technologies of air-water trans-media vehicle. Journal of Air Force Engineering University (Natural Science Edition) (pp. 8–13). vol. 20, no. 3.
Cite this article
Li,Z. (2025). Overview of Aquatic-Air Amphibious Trans-Media Unmanned Aerial Vehicles (UAVs). Theoretical and Natural Science,87,173-184.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Computing Innovation and Applied Physics
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Tang, S., Zhang, B., Yue, C., Sang, C., & Guo, J. (2021). Analysis of key technology and flight dynamics research trend of trans-medium aircraft. Aerodynamic Missile Journal (pp. 7–13). no. 6, doi: 10.16338/j.issn.1009-1319.20210843.
[2]. Yang, X., Liang, J., Wen, L., & Wang, T. (2018). Research status of water-air amphibious trans-media unmanned vehicle. Robot (pp. 102–114). vol. 40, no. 1, doi: 10.13973/j.cnki.robot.170241.
[3]. Zhu, Y., Fan, G., & Yi, J. (2011). Modeling longitudinal aerodynamic and hydrodynamic effects of a flying boat in calm water. 2011 IEEE International Conference on Mechatronics and Automation (pp. 2039-2044). doi: 10.1109/ICMA.2011.5986240.
[4]. Li, J., Yang, A., & Su, L. (2012). Modeling and Simulation of Dynamic Characteristics of Slide Jump Steering Trajectory for Trans-media UAV. Torpedo Technology (pp. 401–406). vol. 20, no. 6.
[5]. Weisler. W., Stewart. W., Anderson, M. B., Peters, K. J., Gopalarathnam, A., & Bryant, M. (2018). Testing and Characterization of a Fixed Wing Cross-Domain Unmanned Vehicle Operating in Aerial and Underwater Environments. IEEE Journal of Oceanic Engineering (pp. 969–982). vol. 43, no. 4, doi: 10.1109/JOE.2017.2742798.
[6]. Stewart, W., Weisler, W., MacLeod, M., Powers, T., Defreitas, A., Gritter, R., Anderson, M., Peters, K., Gopalarathnam, A., & Bryant, A. (2018). Design and demonstration of a seabird-inspired fixed-wing hybrid UAV-UUV system. Bioinspiration & Biomimetics. vol. 13, no. 5, p. 056013, doi: 10.1088/1748-3190/aad48b.
[7]. Zhang, X., Xiao, H., Liu, X., Xing, K., & Lu, X. (2024). Design and Realization of a New Ducted Fan Water-Air Amphibious UAV. Acta Armamentarii (pp. 1–10).
[8]. Zufferey, R., Ortega Ancel, A., Farinha, A., Siddall, R., Armanini, S. F., Nasr, M., Brahmal, R.V., Kennedy, G., & Kovac, M. (2019). Consecutive aquatic jump-gliding with water-reactive fuel. Science Robotics. https://www.science.org/doi/10.1126/scirobotics.aax7330
[9]. Maia, M. M., Soni, P., & Diez, F. J. (2015). Demonstration of an Aerial and Submersible Vehicle Capable of Flight and Underwater Navigation with Seamless Air-Water Transition. ArXiv: arXiv:1507.01932. doi: 10.48550/arXiv.1507.01932.
[10]. Alzu'bi, H., Mansour, I., & Rawashdeh, O. (2018). Loon Copter: Implementation of a hybrid unmanned aquatic–aerial quadcopter with active buoyancy control. Journal of Field Robotics. https://onlinelibrary.wiley.com/doi/10.1002/rob.21777
[11]. Tan, Y. H., & Chen, B. M. (2019). Design of a Morphable Multirotor Aerial-Aquatic Vehicle. In OCEANS 2019 MTS/IEEE SEATTLE (pp. 1–8). doi: 10.23919/OCEANS40490.2019.8962867.
[12]. Chen, Y., Helbling, E. F., Gravish, N., Ma, K., & Wood, R. J. (2015). Hybrid aerial and aquatic locomotion in an at-scale robotic insect. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) (pp. 331–338.). doi: 10.1109/IROS.2015.7353394.
[13]. Siddall, R., Ortega Ancel, A., & Kovaˇc, M. (2016). Wind and water tunnel testing of a morphing aquatic micro air vehicle. Interface Focus. https://royalsocietypublishing.org/doi/epdf/10.1098/rsfs.2016.0085
[14]. Liu, W. (2013). The diving plane design and the aerodynamic shape structural design and analysis. `.
[15]. Zou, Y., You, C., Tan, X., Wang, Y., Wang, J., Li, C., He, M., Lv, K., Zou, Y., Song, H., Lv, P., & Li, H. (2023). Design and implementation of a gliding cross-domain vehicle. Ocean Engineering, vol. 280, p. 114549, doi: 10.1016/j.oceaneng.2023.114549.
[16]. Sun, X., Cao, J., Li, Y., & Wang, B. (2024). Design and field test of a foldable wing unmanned aerial–underwater vehicle. Journal of Field Robotics (pp. 347–373). vol. 41, no. 2, doi: 10.1002/rob.22265.
[17]. Wang, W., Wang, L., Zhang, K., & Huang, Y. Lift–Drag Performance of a New Unmanned Aerial Vehicle in Different Media and Ground Effect. Journal of Marine Science and Engineering, vol. 12, no. 7, Art. no. 7, doi: 10.3390/jmse12071052.
[18]. Ang, H., & Wang, Y. (2022). Design and Control Technology of a Variable Axis Propeller Unmanned Vehicle Cross Region of Water and Air. Unmanned Systems Technology (pp. 1–11). vol. 5, no. 3, doi: 10.19942/j.issn.2096-5915.2022.3.022.
[19]. Bi, Y., Jin, Y., Lyu, C., Zeng, Z., & Lian, L. (2022). Nezha-Mini: Design and Locomotion of a Miniature Low-Cost Hybrid Aerial Underwater Vehicle. IEEE Robotics and Automation Letters (pp. 6669–6676). vol. 7, no. 3, doi: 10.1109/LRA.2022.3176438.
[20]. Bai, Y., Jin, Y., Liu, C., Zeng, Z., & Lian, L. (2023). Nezha-F: Design and Analysis of a Foldable and Self-Deployable HAUV. IEEE Robotics and Automation Letters (pp. 2309–2316). vol. 8, no. 4, doi: 10.1109/LRA.2023.3252343.
[21]. Jin, Y., Bi, Y., Lyu, C., Bai, Y., Zeng, Z., & Lian, L. (2023). Nezha‐IV: A hybrid aerial underwater vehicle in real ocean environments. Journal of Field Robotics. https://onlinelibrary.wiley.com/doi/epdf/10.1002/rob.22274
[22]. Wang, C., Hui, Q., & Zhang, F. (2023). Design of water⁃air cross⁃domain multi⁃mode coaxial UAV. Acta Aeronautica et Astronautica Sinica (pp. 335–347). vol. 44, no. 21.
[23]. Yao, G., Liang, J., Wang, T., Yang, X., Liu, M., & Zhang, Y. (2014). Submersible unmanned flying boat: Design and experiment. 2014 IEEE International Conference on Robotics and Biomimetics (ROBIO 2014) (pp. 1308–1313). doi: 10.1109/ROBIO.2014.7090514.
[24]. Chen, H. (2020). The design and analysis of fluid dynamic characteristics for submersible unmanned aerial vehicle. Nanjing: Nanjing University of Aeronautics and Astronautics. doi: 10.27239/d.cnki.gnhhu.2019.001532.
[25]. Lu, Y., He, Z., & Lu, Y. (2008). Morphing Aircraft Technology. Aeronautical Manufacturing Technology (pp. 26–29). no. 22.
[26]. Feng, J., Hu, J., &Qi, D. (2019). Study on development needs and key technologies of air-water trans-media vehicle. Journal of Air Force Engineering University (Natural Science Edition) (pp. 8–13). vol. 20, no. 3.