






1. Introduction
Various types of stroke occur, including ischemic and hemorrhagic strokes .[1]Stroke can affect individuals of any age, but generally, the risk of stroke increases with age, stroke patients are mainly older people ,especially in elderly individuals aged over 65.Around 50% of acute stroke survivors still suffer major cognitive or physical deficits after receiving treatment for their strokes.[2]The impaired function of the upper extremities after a stroke significantly impacts daily living activities, thereby decreasing quality of life. [3]In addition, the inconvenience caused by the movement will also have a small impact on the emotional state of the patient.So the social integration of patients with disabilities is generally difficult. [4] Therefore, helping stroke patients to carry out effective rehabilitation is a problem worthy of further study.
Executive control functions are crucial to success from a brain perspective, in terms of their functional strength, health, and ability .[5]Rehabilitation through exercise is an important way to treat brain control function. Among the key factors determining motor recovery is high intensity training offered by robotic therapy.[6]It has been found that robotic exoskeletons, which are also known as exosuits, are complex devices that are capable of assisting, amplifying, substituting, or counteracting the movement of individual body parts.[7] Many studies illustrated exoskeletal robotics, has emerged as a means of supporting health and independence.[8]
For prehension, communication, and sensation, the fingers play an important role[9] like the remaining phalanges, the pollex exhibits opposition, a distinctive biomechanical capability enabling retrograde movement vis-à-vis the four digital rays (i.e., index, middle, ring, and minimus). [11]This opposability confers the capacity for fine motor control in precision grip and pinch actions pivotal to object dexterity, constituting a substantial proportion, approximately 40%, of manual functionality.[12]How to design the exoskeleton to accurately simulate the natural movement of the thumb while providing sufficient auxiliary force is an important challenge in hand exoskeleton research. Exoskeletons for the hand can be either light or complex and cost a variety of amounts .[13]Recently, exoskeleton technology for hand rehabilitation has advanced remarkably as modern medicine and engineering technology have integrated and developed rapidly .[14]After extensively reviewing the literature, the researchers have identified that addressing the driving system and thumb movement process are pivotal technical challenges in hand exoskeleton research. Current hand exoskeleton devices often suffer from bulkiness, impeding natural movements of users, and a lack of real-time feedback and deep learning algorithms for intention prediction. Therefore, designing an exoskeleton that accurately emulates natural thumb movement while providing sufficient auxiliary force remains a crucial area requiring further investigation in hand exoskeleton research.With such purpose,the primary objective of this article is to outline the fundamental characteristics of the hand, and delve into the intricate movements of the thumb. Subsequently, we provide a comprehensive overview of the diverse driving modes employed by the thumb module of the hand exoskeleton, and offer a concise summary and comparative analysis to discern the prevailing trends and research lacunae in this domain. This information will facilitate the progression of both existing and novel devices, thereby aiding patients suffering from brain strokes in their recovery process. The remaining sections of the paper are structured as follows: The “Method” section elucidates the search method and selection criteria employed to identify pertinent articles; the screening criteria for different drive modes of hand exoskeleton devices are delineated under the header "Defining Inference Model". The “Results” section presents an overview of the equipment in accordance with the inferred model. Lastly, the key findings are discussed in the " Conclusions" section, and potential design hypotheses for further exploration in this field are enumerated.
2. Methodology
2.1. Journal selection
To identify robotic/mechanical devices for post-stroke thumb rehabilitation, the authors conducted a systematic literature search using the following electronic databases: PubMed/Medline, Web of Science, Scopus, IEEE Xplore, Google Scholar, and China National Knowledge Infrastructure (CNKI). The search terms employed were (Hand exoskeleton AND/OR Thumb motion AND/OR Mechanic AND/OR Exoskeleton AND/OR Rehabilitation AND/OR Actuator mechanisms), the time range of search is 2009-2023, with exclusion criteria applied to devices lacking sufficient technical information in order to refine the search. Keywords such as hand rehabilitation device, active and active-assisted rehabilitation therapy, hand exoskeleton, and hand orthosis were utilized to compile a comprehensive list of these powered devices.
2.2. Defining retrieval model
The retrieval model illustrated in Figure 1 offers a thorough examination of the actuation system utilized in the hand rehabilitation exoskeleton, adeptly analyzing inductive data. This model predominantly concentrates on evaluating the propulsion system of hand devices and performing detailed data analysis regarding different categories, actuation system, and incorporation of other fingers supported as reference points.
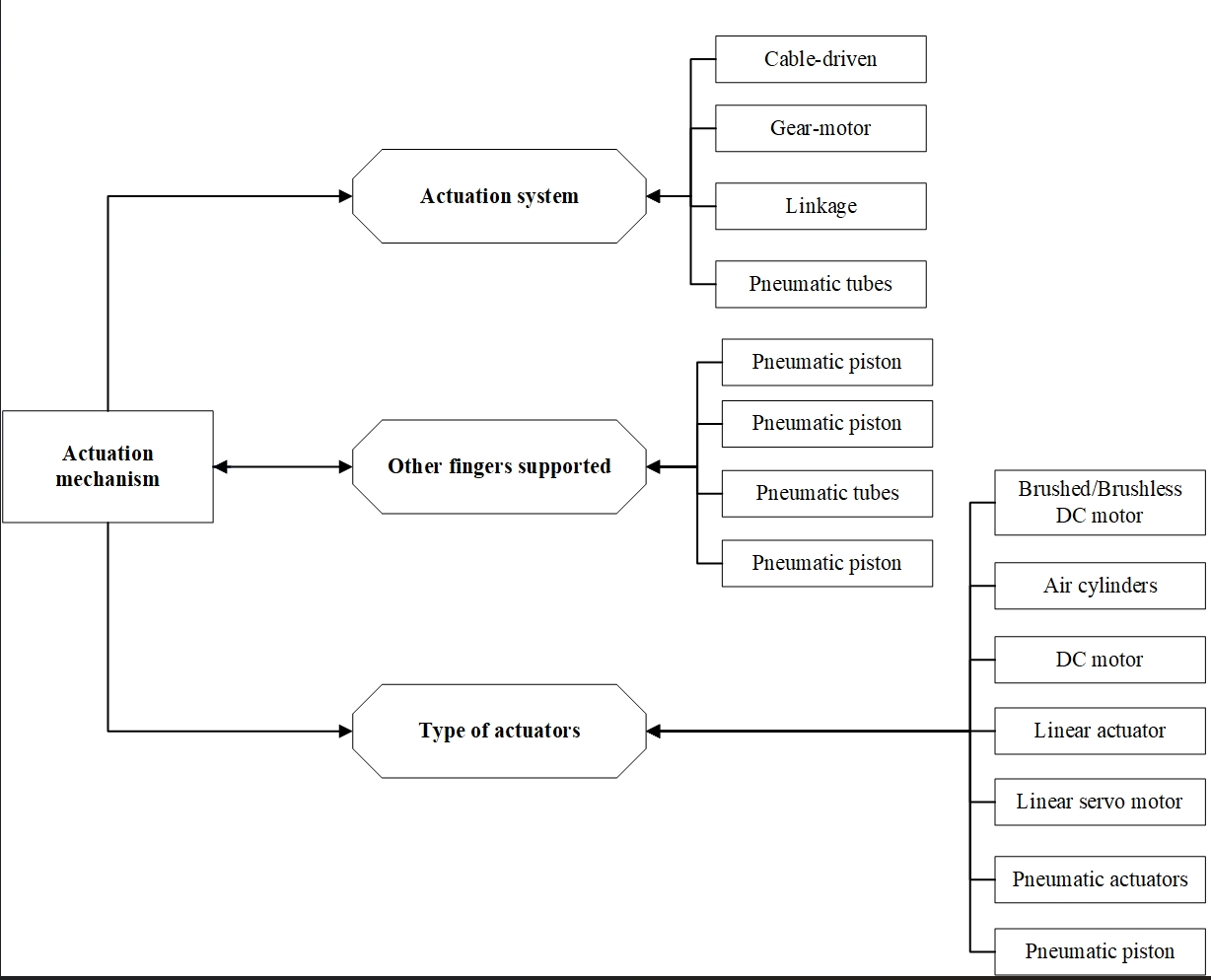
Figure 1. Hand exoskeleton retrieval model
3. Discussion and Results
3.1. Anatomical structure of hand
Both sensory acquisition and motor control occur in the human hand, making it one of the most complex structures in the body . [15]It is possible that the complex structure and function of the hand as well as the neural basis that supports hand function contribute to the great difficulty of hand function rehabilitation after stroke.[16]Hand skeletons have 27 bones in total, including eight carpal bones in two rows, five metacarpals, and fourteen phalanges.[17]The skeletal structure of the hand consists of 8 carpal bones arranged in two rows, connecting the forearm to the palm; 5 metacarpal bones, which connect the fingers to the wrists, with the first metacarpal bone corresponding to the thumb and the second to fifth metacarpal bones forming the palm; and 14 phalanges, with the thumb composed of proximal and distal phalanges, and the fingers (excluding the thumb) composed of proximal, middle, and distal phalanges. Among five fingers, thumb has only two phalangeal segments (distal and proximal). The joints of the hand are named after the bones they connect to. Therefore, each finger has a metacarpophalangeal joint (MCP) and two interphalangeal joints (IP): distal (DIP) and proximal (PIP). The thumb has only one IP joint. In addition, each knuckle contains a carpometacarpal joint (CMC). The CMC joint of the thumb is also called the thumb carpometacarpal joint (TMC), because it is where the thumb metacarpal bone connects with the trapezius bone.
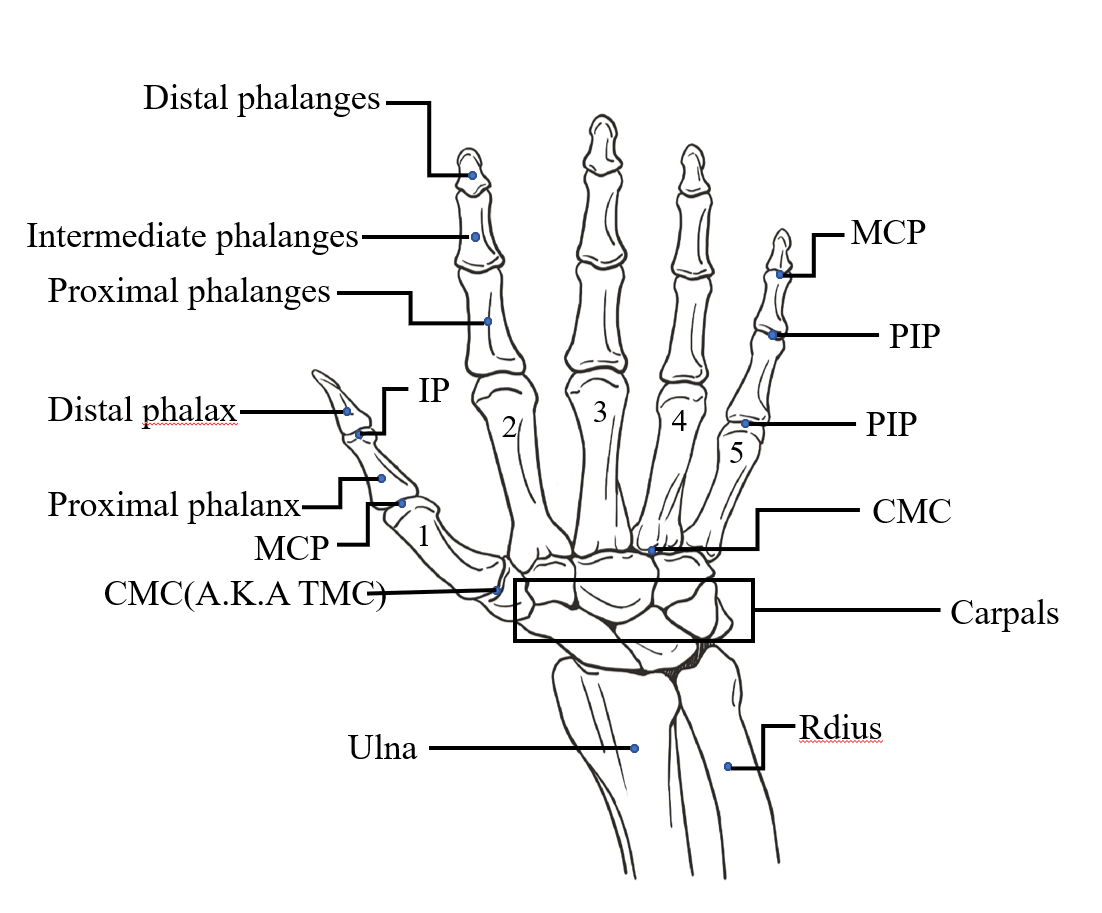
Figure 2. Schematic diagram of skeletal structure of the hand
3.2. Thumb motion anaylsis
The thumb exhibits a wider range of motion compared to the other fingers, with the ability to flex upwards, downwards, inwards, outwards, forwards, and backwards, while the other fingers are limited to bending within a fixed plane. Norkin and White, as well as Barakat et al.[18-19] established a standardized method in 2013 based on the thumb's range of motion, indicating the complexity of thumb movement. The thumb demonstrates a higher degree of independence relative to the other fingers, allowing for individual control during fine motor tasks, whereas the other fingers typically require coordination with the thumb. This independence affords the thumb greater flexibility and adaptability in various scenarios requiring intricate manual dexterity. Tang et al.[20] conducted a comprehensive marker-based study on thumb motion, noting that the first metacarpal generally moves in an oblique direction relative to the anatomy of the carpometacarpal (CMC) joint. Additionally, the American Medical[21-22]Association's research further supports these findings.
Analyzing thumb motion involves examining the range and direction of movement in the three main joints. The carpometacarpal joint, located at the base of the thumb, allows for a wide range of movements such as flexion and extension. Radial Deviation is when the thumb moves outward from the wrist, while Ulnar Deviation is when the thumb moves inward. Rotation allows the thumb to point towards other fingers or away from the palm. The MCP joint enables flexion, extension, and lateral movement of the thumb, with flexion being the main movement. The proximal phalanx moves away from the metacarpal bone, while the Interphalangeal Joint (IP) between the thumb's phalanges allows for flexion and extension. Coordination of these joints enables complex hand movements.
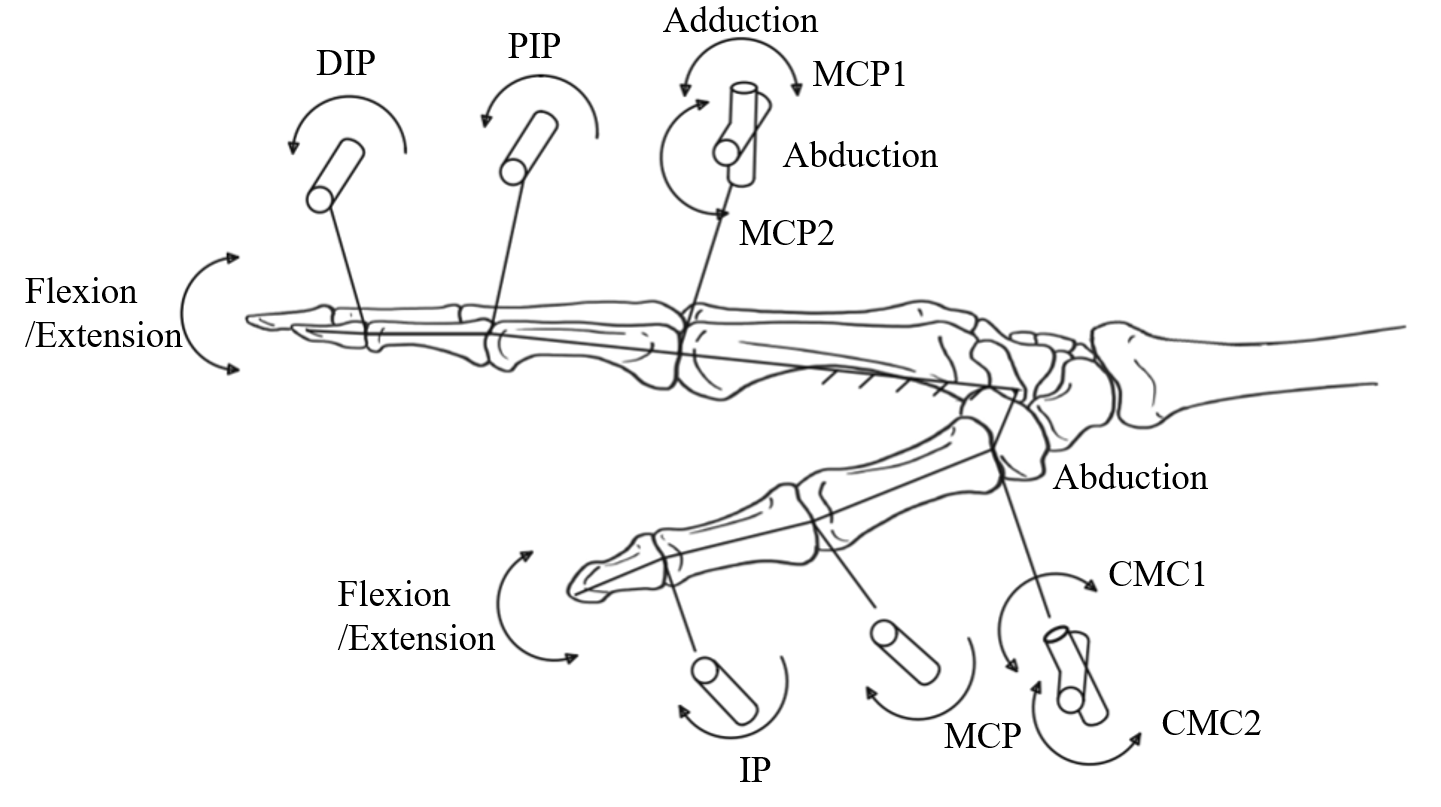
Figure 3. Thumb motions analysis diagram
3.3. Hand exoskeleton actuation system
The driving mechanism of hand exoskeleton devices encompasses the system utilized to regulate the movement of different joints of the exoskeleton, converting energy into mechanical motion through various physical methods to aid in the movement of human hands. The actuation systems outlined in this study are primarily categorized into five groups: Cable actuation, linkage-based actuation, Pneumatic actuation, and gear-motor actuation. Furthermore, other actuation systems such as Spring sheet actuation,Soft actuation are not addressed in this analysis. Cable actuation controls joint movement with ropes or cables. Linkage-based actuation uses rigid linkages connected to motors.Pneumatic actuation uses pneumatic actuators for force. Gear-motor actuation uses a motor to create rotating motion, which is then converted into linear motion for the finger through gears.
Table 1. Thumb module of devices
Author/enterprise | Device name | Actuation system | Type of actuators | Other fingers supported |
Fischer et al.[23] | X-Glove | Linkage | Linear servo motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Takagi et al.[24] | -- | Linkage | Air cylinders | Ⅱ、Ⅲ |
K.O.Thielbar et al.[25] | VAEDA | Cable-driven | DC motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Borboni,A et al.[26] | Gloreha | Cable-driven | Pneumatic piston | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Connelly.L et al.[27] | Pneuglove | Pneumatic tubes | Pneumatic actuators | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Tong et al.[28] | Hand of hope | Linkage | Linear actuator | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Iqbal et al.[29-31] | HEXOSYS Ⅰ | Linkage | Linear actuator | Ⅱ |
Iqbal et al.[32] | HEXOSYS Ⅱ | Linkage | DC motor | Ⅱ、Ⅲ、Ⅳ |
Fischer et al.(festo enterprise)[33] | ExoHand | Linkage | Linear actuator | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Troncossi et al.[34-35] | BRAVO | Linkage | DC motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Y.Zhou et al.[36] | Wear Me | Cable-driven | Brushless DC motor | Ⅱ |
Aubin et al.[37] | IOTA(Isolated orthosis for thumb actuation) | Cable-driven with Linkage | Servo motor | -- |
Tong et al.[38] | -- | Linkage | Linear servo motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Meeker et al.[39] | Meeker | Cable-driven | Brushed DC motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Delph et al.[40] | Delph | Cable-driven | Servo motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Sandoval-Gonzalez O et al.[41] | Exok'ab | Gear-motor | Brushless DC motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Haghshenas-Jaryani et al.[42] | REHABGlove | Pneumatic tubes | Pneumatic actuators | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
Gupta et al.[43] | ATX | Linkage(and flexible shafts) | DC motor(5,one per motion pair) | -- |
MOTUS NOVA[44] | Motus Hand | Linkage | Pneumatic actuators | -- |
Ochoa et al.[45] | J-Glove | Cable-driven(tendon based) | DC motor | Ⅱ、Ⅲ、Ⅳ、Ⅴ |
3.3.1. Cable actuation
In terms of actuators, cable-driven transmissions are the most common .[46]Cable-driven mechanisms use a series of ropes or cables to control the joint movements of the exoskeleton by stretching or relaxing these cables. This mechanism usually involves one or more motors that regulate the tension of the cables by rotating an actuator (e.g., a pulley) to allow for bending and stretching of the fingers.
The primary limitation of a cable-driven system lies in its intricate control requirements, necessitating precise tension regulation to facilitate coordinated and seamless finger movement. This complexity often demands sophisticated control mechanisms and algorithms to effectively manage the tension across multiple cables to prevent inconsistencies in motion. Furthermore, friction between the cables and various mechanical components, such as pulleys and guideways, during operation can result in gradual wear and deterioration, ultimately compromising the system's overall performance over time. Michael A Delph II et al. created a soft robotic glove called Delph that uses a cable-driven system to control finger movements. However, the system faces challenges with weight distribution, safety design, cable maintenance, and personalized adjustment, especially in managing tangled or damaged cables. [47]Yue Zhou et al. created a WearME Glove with a cable-driven system for precise control of finger and wrist movements, but cable slack can delay motor response and impact accuracy.[36]
3.3.2. Linkage-based actuation
Linkage actuation systems are mechanical transmission devices that transform rotary motion into linear motion. The primary purpose of these systems is to convert the rotational energy of a motor into linear reciprocating motion, enabling precise position control and force transmission. These systems are preferred for their precise control capabilities, efficient use of space, and simplified mechanical design, making them particularly suitable for applications requiring precision and limited space. Daniele Leonardis introduced the Bravo hand exoskeleton, which utilizes a Linkage actuation system to accurately replicate grip pressure across various experimental settings, allowing subjects to adapt their grip force in accordance with task demands. [34-35] Gupta et al. on the other hand, developed the ATX hand rehabilitation robot, which also employs Linkage actuation to enhance hand functionality through joint motor exercises and finger coordination training.[43]
Linkage actuation systems exhibit constraints in load-carrying capacity, dynamic response, and cost-effectiveness. The mechanical design may entail intricacies necessitating precise calibration and upkeep. Despite attempts at weight reduction, the exoskeleton may still impose strain on the patient's wrist, thereby compromising comfort. Furthermore, limitations in real-time feedback exist, particularly in instances involving patients with elevated muscle tension or muscle atrophy, rendering the accurate estimation and replication of force challenging.
3.3.3. Pneumatic actuation
Pneumatic actuation mechanisms employ gas pressure to facilitate the transmission of force and motion. Typically, these mechanisms incorporate one or multiple cylinders that generate linear or rotational motion when pressurized, thereby propelling the joints of the exoskeleton. While this method can yield significant force output, it often necessitates an external compressed air or hydraulic pump to serve as the primary power source.The research team led by Lauri Connelly has developed a pneumatic glove called PneuGlove, which is able to provide independent stretching assistance for each finger while allowing full arm movement, allowing patients to achieve significant improvements in areas such as the Fugl-Meyer assessment, the Box and Blocks test, and palm pinching force.[27] The pneumatic actuation system enables individualized control of finger assistance, accommodating the diverse rehabilitation requirements of patients. The lightweight pneumatic system gloves facilitate portability and usage in various positions, offering versatility and immediate feedback for therapists to tailor the training intensity and complexity.
Pneumatic systems exhibit certain limitations necessitating regular maintenance for optimal functionality and cleanliness of airbags. These systems may restrict the natural range of finger motion, particularly when airbags are inflated, and may necessitate supplementary hardware like air compressors and piping, thereby increasing system complexity and cost. Additionally, pneumatic gloves may lack precision in controlling movement within finger joints, thereby limiting their efficacy in intricate hand movement training scenarios.
3.3.4. Gear-motor actuation
The actuation mechanism of the hand exoskeleton typically involves the utilization of a gear motor system, comprising gears and a motor, to supply power and regulate the motion of the fingers or wrists. Within this system, the rotational energy produced by the motor is transformed into linear motion or alters the direction of movement through the gear transmission mechanism, thereby facilitating the articulation of the exoskeleton joints in flexion, extension, and other movements. The geared motor drive system offers accurate control over position and force, which is crucial for achieving precise movements in the context of rehabilitation.Sandoval-Gonzalez et al. introduced a new type of rehabilitation manipulator exoskeleton (ExoK'ab) that uses a gear motor drive system and is specially designed for position and force-position control. [41]
The challenges associated with gear motor drives parallel those of linkage drives, as their intricate mechanical design can pose challenges in terms of maintenance and adjustment. While initially intended to be cost-effective, the incorporation of high-precision sensors and motors may contribute to an increase in overall expenses. Furthermore, the complex gearing system of gear motor drives may impact their portability and usability.
3.4. Hybrid actuation system
Some hand exoskeletons utilize a hybrid drive system in addition to a single actuation system. The hybrid drive system combines various actuation modes to better accommodate the diverse needs of users and hand sizes, providing personalized assistance. Y. Zhang et al. developed a flexible hand exoskeleton robot with dexterous operation capabilities, optimizing the hybrid drive configuration to enable three-dimensional movement of the human thumb, assisted stroke patients to complete various training tasks, and significantly improved the fingertip force level.[48] The research and development of this hybrid drive system provides a new technological approach to hand rehabilitation.
The hybrid actuation modes of the exoskeleton allow for seamless transitions between various phases and tasks, or the simultaneous utilization of different drive modes, in order to enhance energy efficiency and movement effectiveness. This hybrid drive system enables the exoskeleton to deliver the requisite strength and stability during precise movements, while also offering sufficient flexibility for tasks requiring compliance.

Figure 4. Hand exoskeleton rehabiliation devices.
4. Conclusion
This article provides a comprehensive overview of thumb hand exoskeleton equipment, analyzing and discussing the motion model of the thumb and the driving mode of the exoskeleton. The unique construction of the thumb presents a challenge in accurately defining a suitable thumb movement model for the design of hand exoskeletons, which remains an unresolved task. A significant portion of the equipment remains in the experimental phase, necessitating additional research prior to its implementation in clinical settings to effectively augment therapist efforts by enabling rigorous treatment through accurate and reproducible exercises. Due to the varying rehabilitation preferences of individual patients, a comprehensive unified model for hand rehabilitation assisted therapy that adequately addresses all needs has yet to be developed. The hybrid drive system enables intricate hand movements, including delicate gripping and manipulation, crucial for rehabilitation and daily activities. Ongoing research and development of hybrid-driven hand exoskeletons aim to enhance functionality, adaptability, and user experience to effectively aid patients with hand dysfunction in rehabilitation and daily living tasks.
References
[1]. Zhai L, Liu M, Wang T, Zhang H, Li S, Guo Y. Picroside II protects the blood-brain barrier by inhibiting the oxidative signaling pathway in cerebral ischemia-reperfusion injury. PLoS One. 2017 Apr 7;12(4):e0174414.
[2]. Hill K, House A, Knapp P, Wardhaugh C, Bamford J, Vail A. Prevention of mood disorder after stroke: a randomised controlled trial of problem solving therapy versus volunteer support. BMC Neurol. 2019 Jun 14;19(1):128.
[3]. Taketomi M, Shimizu Y, Kadone H, Kubota S, Kagai Y, Okamoto Y, Hada Y, Yamazaki M. Shoulder Joint Hybrid Assistive Limb Treatment for Chronic Stroke Patients with Upper Limb Dysfunction. J Clin Med. 2023 Feb 3;12(3):1215.
[4]. González AK, Rodríguez-Reséndiz J, Gonzalez-Durán JEE, Olivares Ramírez JM, Estévez-Bén AA. Development of a Hip Joint Socket by Finite-Element-Based Analysis for Mechanical Assessment. Bioengineering (Basel). 2023 Feb 18;10(2):268.
[5]. Cripe CT, Mikulecky P, Sucher M, Huang JH, Hack D. Improved Sobriety Rates After Brain-Computer Interface-Based Cognitive Remediation Training. Cureus. 2022 Jan 19;14(1):e21429.
[6]. Perry BE, Evans EK, Stokic DS. Weight compensation characteristics of Armeo®Spring exoskeleton: implications for clinical practice and research. J Neuroeng Rehabil. 2017 Feb 17;14(1):14.
[7]. Vélez-Guerrero MA, Callejas-Cuervo M, Álvarez JC, Mazzoleni S. Assessment of the Mechanical Support Characteristics of a Light and Wearable Robotic Exoskeleton Prototype Applied to Upper Limb Rehabilitation. Sensors (Basel). 2022 May 25;22(11):3999.
[8]. Martini E, Crea S, Parri A, Bastiani L, Faraguna U, McKinney Z, Molino-Lova R, Pratali L, Vitiello N. Gait training using a robotic hip exoskeleton improves metabolic gait efficiency in the elderly. Sci Rep. 2019 May 9;9(1):7157.
[9]. Dastagir N, Obed D, Dastagir K, Vogt PM. Personalized Treatment Decisions for Traumatic Proximal Finger Amputations: A Retrospective Cohort Study. J Pers Med. 2023 Jan 26;13(2):215.
[10]. [10] Suarez-Escobar, M (Suarez-Escobar, Marian); Rendon-Velez, E (Rendon-Velez, Elizabeth). An overview of robotic/mechanical devices for post-stroke thumb rehabilitation. Disability and rehabilitation-assistive technology, vol.13,no.7,pp.683-703.
[11]. Segu SS, Athavale SN, Manjunath P. Osteoplastic Reconstruction for Post Traumatic Thumb Amputations Around Metacarpophalangeal Joint. J Clin Diagn Res. 2015 Aug;9(8):PC11-3.
[12]. Triolo ER, BuSha BF. Design and experimental testing of a force-augmenting exoskeleton for the human hand. J Neuroeng Rehabil. 2022 Feb 21;19(1):23.
[13]. Han Y, Xu Q, Wu F. Design of Wearable Hand Rehabilitation Glove With Bionic Fiber-Reinforced Actuator. IEEE J Transl Eng Health Med. 2022 Aug 4;10:2100610.
[14]. Abdouni A, Moreau G, Vargiolu R, Zahouani H. Static and active tactile perception and touch anisotropy: aging and gender effect. Sci Rep. 2018 Sep 24;8(1):14240.
[15]. Wang H, Arceo R, Chen S, Ding L, Jia J, Yao J. Effectiveness of interventions to improve hand motor function in individuals with moderate to severe stroke: a systematic review protocol. BMJ Open. 2019 Sep 27;9(9):e032413.
[16]. Gurusamy K, Begum Z Jr, Maria Francis Y, Karunakaran B, Raghunath G. A Study on Sexual Dimorphism of Adult Wet Scaphoid Specimens. Cureus. 2022 Feb 15;14(2):e22263.
[17]. Norkin CC, White DJ: Measurement of joint motion: a guide to goniometry, fourth edition. FA Davis, Philadelphia, Pennsylvania; 2009.
[18]. Barakat MJ, Field J, Taylor J: The range of movement of the thumb. Hand (N Y). 2013, 8:179-82.
[19]. Cocchiarella L, Turk MA, Andersson G: Improving the evaluation of permanent impairment . JAMA. 2000, 283:532-3.
[20]. Tang J, Zhang X, Li ZM. Operational and maximal workspace of the thumb. Ergonomics. 2008;51:1109-1118.
[21]. Halilaj E, Rainbow MJ, Got C, Schwartz JB, Moore DC, Weiss AP, Ladd AL, Crisco JJ. In vivo kinematics of the thumb carpometacarpal joint during three isometric functional tasks. Clin Orthop Relat Res. 2014 Apr;472(4):1114-22.
[22]. Bardi E, Gandolla M, Braghin F, Resta F, Pedrocchi ALG, Ambrosini E. Upper limb soft robotic wearable devices: a systematic review. J Neuroeng Rehabil. 2022 Aug 10;19(1):87.
[23]. H. C. Fischer et al., "Use of a Portable Assistive Glove to Facilitate Rehabilitation in Stroke Survivors With Severe Hand Impairment," in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 24, no. 3, pp. 344-351, March 2016.
[24]. Takagi M,Iwata K,Takahashi Y,et al.Development of a grip aid system using air cylinders.Proceedings of the IEEE International Conference on Robotics and Automation;2009 May 12–17;Kobe,Japan:IEEE.p. 2312–2317.
[25]. K. O. Thielbar et al., "Benefits of Using a Voice and EMG-Driven Actuated Glove to Support Occupational Therapy for Stroke Survivors," in IEEE Transactions on(Thielbar, Triandafilou et al. 2017) Neural Systems and Rehabilitation Engineering, vol. 25, no. 3, pp. 297-305, March 2017.
[26]. Rodigari A,Zancan A,Jedrychowska I,et al.Effectiveness of the treatment of hemiplegic patient's hand with robotic rehabilitation glove “Gloreha”:preliminary results. 42nd National Congress of the Italian Society of Physical and Rehabilitative Medicine(SIMFER); 2014 September 28–October 1,2014; Torino,Italy.DEVICES FOR POST-STROKE THUMB REHABILITATION 703.
[27]. L. Connelly, Y. Jia, M. L. Toro, M. E. Stoykov, R. V. Kenyon and D. G. Kamper, "A Pneumatic Glove and Immersive Virtual Reality Environment for Hand Rehabilitative Training After Stroke," in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 18, no. 5, pp. 551-559, Oct. 2010.
[28]. Tong KY,Ho SK,Pang PK,et al.An intention driven hand functions task training robotic system.Conference pro ceedings of the 32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (IEEE EMBS);2010;Buenos Aires,Argentina:IEEE. p.3406–3409.
[29]. Iqbal J,Tsagarakis NG,Caldwell DG.Human hand compat ible underactuated exoskeleton robotic system.Electron Lett.2014;50:494–496.
[30]. Iqbal J,Baizid K.Stroke rehabilitation using exoskeleton based robotic exercisers:mini review.Biomed Res. 2015;26:197–201.
[31]. Iqbal J,Tsagarakis NG,Fiorilla AE,Caldwell DG.A portable rehabilitation device for the Hand.Conference proceed ings of the 32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society(IEEE EMBS);2010;Buenos Aires,Argentina:IEEE.p.3694–3697.
[32]. Iqbal J,Ahmad O,Malik A.HEXOSYS II-towards realiza tion of light mass robotics for the hand.Proceedings of the IEEE 14th International Multitopic Conference(INMIC); 2011 Dec 22–24.Karachi,Pakistan:IEEE.p.115–119.
[33]. Fischer M,Knubben E,Neumann R,et al.and others. Germany:Festo AG&Co.KG;2012[cited 2017]. Available from:https://www.festo.com.cn/cn/zh/e/about-festo/research-and-development/bionic-learning-network/highlights-from-2010-to-2012-id_33625/(accessed on 25 February 2024).
[34]. Troncossi M,Mozaffari Foumashi M,Mazzotti C,et al. Design and manufacturing of a hand-and-wrist exoskel eton prototype for the rehabilitation of post-stroke patients.Quaderni del DIEM–GMA.Atti della Sesta Giornata di Studio Ettore Funaioli;2012.p.111–120.
[35]. D. Leonardis et al. "An EMG-Controlled Robotic Hand Exoskeleton for Bilateral Rehabilitation," in IEEE Transactions on Haptics, vol. 8, no. 2, pp. 140-151, 1 April-June 2015.
[36]. Y. Zhou, T. Desplenter, S. Chinchalkar and A. L. Trejos, "A Wearable Mechatronic Glove for Resistive Hand Therapy Exercises," 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 2019, pp. 1097-1102.
[37]. P. M. Aubin, H. Sallum, C. Walsh, L. Stirling and A. Correia, "A pediatric robotic thumb exoskeleton for at-home rehabilitation: The Isolated Orthosis for Thumb Actuation (IOTA)," 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 2013, pp. 1-6, doi: 10.1109/ICORR.2013.6650500.
[38]. Lu Z, Tong KY, Shin H, Li S, Zhou P. Advanced Myoelectric Control for Robotic Hand-Assisted Training: Outcome from a Stroke Patient. Front Neurol. 2017 Mar 20;8:107.
[39]. C. Meeker, S. Park, L. Bishop, J. Stein and M. Ciocarlie, "EMG pattern classification to control a hand orthosis for functional grasp assistance after stroke," 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 2017, pp. 1203-1210 .
[40]. M. A. Delph, S. A. Fischer, P. W. Gauthier, C. H. M. Luna, E. A. Clancy and G. S. Fischer, "A soft robotic exomusculature glove with integrated sEMG sensing for hand rehabilitation," 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 2013, pp. 1-7.
[41]. Sandoval-Gonzalez O, Jacinto-Villegas J, Herrera-Aguilar I, et al. Design and Development of a Hand Exoskeleton Robot for Active and Passive Rehabilitation. International Journal of Advanced Robotic Systems. 2016;13(2).
[42]. Haghshenas-Jaryani, M, Nothnagle, C, Patterson, RM, Bugnariu, N, & Wijesundara, MBJ. "Soft Robotic Rehabilitation Exoskeleton (REHAB Glove) for Hand Therapy." Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Volume 3: 19th International Conference on Advanced Vehicle Technologies; 14th International Conference on Design Education; 10th Frontiers in Biomedical Devices. Cleveland, Ohio, USA. August 6–9, 2017. V003T13A005. ASME. https://doi.org/10.1115/DETC2017-68291
[43]. Y. Fu, Q. Zhang, F. Zhang and Z. Gan, "Design and development of a hand rehabilitation robot for patient-cooperative therapy following stroke," 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 2011, pp. 112-117.
[44]. Motus Nova Stroke Rehab Recovery at Home.Available online:https://motusnova.com/hand/.(accessed on 26 February 2024).
[45]. J. M. Ochoa, Yicheng Jia, D. Narasimhan and D. G. Kamper, "Development of a portable actuated orthotic glove to facilitate gross extension of the digits for therapeutic training after stroke," 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 2009, pp. 6918-6921.
[46]. Xie Q, Meng Q, Yu W, Wu Z, Xu R, Zeng Q, Zhou Z, Yang T, Yu H. Design of a SMA-based soft composite structure for wearable rehabilitation gloves. Front Neurorobot. 2023 Feb 10;17:1047493.
[47]. Kabir R, Sunny MSH, Ahmed HU, Rahman MH. Hand Rehabilitation Devices: A Comprehensive Systematic Review. Micromachines (Basel). 2022 Jun 29;13(7):1033.
[48]. Y. Zhang, Z. Song and R. Fu, "Hand exoskeleton for rehabilitation using a flexible screw mechanism," 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), Koh Samui, Thailand, 2023, pp. 1-6.
Cite this article
Yuan,X. (2024). An overview about hand exoskeleton actuation system and thumb motions analysis. Applied and Computational Engineering,82,54-64.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Machine Learning and Automation
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Zhai L, Liu M, Wang T, Zhang H, Li S, Guo Y. Picroside II protects the blood-brain barrier by inhibiting the oxidative signaling pathway in cerebral ischemia-reperfusion injury. PLoS One. 2017 Apr 7;12(4):e0174414.
[2]. Hill K, House A, Knapp P, Wardhaugh C, Bamford J, Vail A. Prevention of mood disorder after stroke: a randomised controlled trial of problem solving therapy versus volunteer support. BMC Neurol. 2019 Jun 14;19(1):128.
[3]. Taketomi M, Shimizu Y, Kadone H, Kubota S, Kagai Y, Okamoto Y, Hada Y, Yamazaki M. Shoulder Joint Hybrid Assistive Limb Treatment for Chronic Stroke Patients with Upper Limb Dysfunction. J Clin Med. 2023 Feb 3;12(3):1215.
[4]. González AK, Rodríguez-Reséndiz J, Gonzalez-Durán JEE, Olivares Ramírez JM, Estévez-Bén AA. Development of a Hip Joint Socket by Finite-Element-Based Analysis for Mechanical Assessment. Bioengineering (Basel). 2023 Feb 18;10(2):268.
[5]. Cripe CT, Mikulecky P, Sucher M, Huang JH, Hack D. Improved Sobriety Rates After Brain-Computer Interface-Based Cognitive Remediation Training. Cureus. 2022 Jan 19;14(1):e21429.
[6]. Perry BE, Evans EK, Stokic DS. Weight compensation characteristics of Armeo®Spring exoskeleton: implications for clinical practice and research. J Neuroeng Rehabil. 2017 Feb 17;14(1):14.
[7]. Vélez-Guerrero MA, Callejas-Cuervo M, Álvarez JC, Mazzoleni S. Assessment of the Mechanical Support Characteristics of a Light and Wearable Robotic Exoskeleton Prototype Applied to Upper Limb Rehabilitation. Sensors (Basel). 2022 May 25;22(11):3999.
[8]. Martini E, Crea S, Parri A, Bastiani L, Faraguna U, McKinney Z, Molino-Lova R, Pratali L, Vitiello N. Gait training using a robotic hip exoskeleton improves metabolic gait efficiency in the elderly. Sci Rep. 2019 May 9;9(1):7157.
[9]. Dastagir N, Obed D, Dastagir K, Vogt PM. Personalized Treatment Decisions for Traumatic Proximal Finger Amputations: A Retrospective Cohort Study. J Pers Med. 2023 Jan 26;13(2):215.
[10]. [10] Suarez-Escobar, M (Suarez-Escobar, Marian); Rendon-Velez, E (Rendon-Velez, Elizabeth). An overview of robotic/mechanical devices for post-stroke thumb rehabilitation. Disability and rehabilitation-assistive technology, vol.13,no.7,pp.683-703.
[11]. Segu SS, Athavale SN, Manjunath P. Osteoplastic Reconstruction for Post Traumatic Thumb Amputations Around Metacarpophalangeal Joint. J Clin Diagn Res. 2015 Aug;9(8):PC11-3.
[12]. Triolo ER, BuSha BF. Design and experimental testing of a force-augmenting exoskeleton for the human hand. J Neuroeng Rehabil. 2022 Feb 21;19(1):23.
[13]. Han Y, Xu Q, Wu F. Design of Wearable Hand Rehabilitation Glove With Bionic Fiber-Reinforced Actuator. IEEE J Transl Eng Health Med. 2022 Aug 4;10:2100610.
[14]. Abdouni A, Moreau G, Vargiolu R, Zahouani H. Static and active tactile perception and touch anisotropy: aging and gender effect. Sci Rep. 2018 Sep 24;8(1):14240.
[15]. Wang H, Arceo R, Chen S, Ding L, Jia J, Yao J. Effectiveness of interventions to improve hand motor function in individuals with moderate to severe stroke: a systematic review protocol. BMJ Open. 2019 Sep 27;9(9):e032413.
[16]. Gurusamy K, Begum Z Jr, Maria Francis Y, Karunakaran B, Raghunath G. A Study on Sexual Dimorphism of Adult Wet Scaphoid Specimens. Cureus. 2022 Feb 15;14(2):e22263.
[17]. Norkin CC, White DJ: Measurement of joint motion: a guide to goniometry, fourth edition. FA Davis, Philadelphia, Pennsylvania; 2009.
[18]. Barakat MJ, Field J, Taylor J: The range of movement of the thumb. Hand (N Y). 2013, 8:179-82.
[19]. Cocchiarella L, Turk MA, Andersson G: Improving the evaluation of permanent impairment . JAMA. 2000, 283:532-3.
[20]. Tang J, Zhang X, Li ZM. Operational and maximal workspace of the thumb. Ergonomics. 2008;51:1109-1118.
[21]. Halilaj E, Rainbow MJ, Got C, Schwartz JB, Moore DC, Weiss AP, Ladd AL, Crisco JJ. In vivo kinematics of the thumb carpometacarpal joint during three isometric functional tasks. Clin Orthop Relat Res. 2014 Apr;472(4):1114-22.
[22]. Bardi E, Gandolla M, Braghin F, Resta F, Pedrocchi ALG, Ambrosini E. Upper limb soft robotic wearable devices: a systematic review. J Neuroeng Rehabil. 2022 Aug 10;19(1):87.
[23]. H. C. Fischer et al., "Use of a Portable Assistive Glove to Facilitate Rehabilitation in Stroke Survivors With Severe Hand Impairment," in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 24, no. 3, pp. 344-351, March 2016.
[24]. Takagi M,Iwata K,Takahashi Y,et al.Development of a grip aid system using air cylinders.Proceedings of the IEEE International Conference on Robotics and Automation;2009 May 12–17;Kobe,Japan:IEEE.p. 2312–2317.
[25]. K. O. Thielbar et al., "Benefits of Using a Voice and EMG-Driven Actuated Glove to Support Occupational Therapy for Stroke Survivors," in IEEE Transactions on(Thielbar, Triandafilou et al. 2017) Neural Systems and Rehabilitation Engineering, vol. 25, no. 3, pp. 297-305, March 2017.
[26]. Rodigari A,Zancan A,Jedrychowska I,et al.Effectiveness of the treatment of hemiplegic patient's hand with robotic rehabilitation glove “Gloreha”:preliminary results. 42nd National Congress of the Italian Society of Physical and Rehabilitative Medicine(SIMFER); 2014 September 28–October 1,2014; Torino,Italy.DEVICES FOR POST-STROKE THUMB REHABILITATION 703.
[27]. L. Connelly, Y. Jia, M. L. Toro, M. E. Stoykov, R. V. Kenyon and D. G. Kamper, "A Pneumatic Glove and Immersive Virtual Reality Environment for Hand Rehabilitative Training After Stroke," in IEEE Transactions on Neural Systems and Rehabilitation Engineering, vol. 18, no. 5, pp. 551-559, Oct. 2010.
[28]. Tong KY,Ho SK,Pang PK,et al.An intention driven hand functions task training robotic system.Conference pro ceedings of the 32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society (IEEE EMBS);2010;Buenos Aires,Argentina:IEEE. p.3406–3409.
[29]. Iqbal J,Tsagarakis NG,Caldwell DG.Human hand compat ible underactuated exoskeleton robotic system.Electron Lett.2014;50:494–496.
[30]. Iqbal J,Baizid K.Stroke rehabilitation using exoskeleton based robotic exercisers:mini review.Biomed Res. 2015;26:197–201.
[31]. Iqbal J,Tsagarakis NG,Fiorilla AE,Caldwell DG.A portable rehabilitation device for the Hand.Conference proceed ings of the 32nd Annual International Conference of the IEEE Engineering in Medicine and Biology Society(IEEE EMBS);2010;Buenos Aires,Argentina:IEEE.p.3694–3697.
[32]. Iqbal J,Ahmad O,Malik A.HEXOSYS II-towards realiza tion of light mass robotics for the hand.Proceedings of the IEEE 14th International Multitopic Conference(INMIC); 2011 Dec 22–24.Karachi,Pakistan:IEEE.p.115–119.
[33]. Fischer M,Knubben E,Neumann R,et al.and others. Germany:Festo AG&Co.KG;2012[cited 2017]. Available from:https://www.festo.com.cn/cn/zh/e/about-festo/research-and-development/bionic-learning-network/highlights-from-2010-to-2012-id_33625/(accessed on 25 February 2024).
[34]. Troncossi M,Mozaffari Foumashi M,Mazzotti C,et al. Design and manufacturing of a hand-and-wrist exoskel eton prototype for the rehabilitation of post-stroke patients.Quaderni del DIEM–GMA.Atti della Sesta Giornata di Studio Ettore Funaioli;2012.p.111–120.
[35]. D. Leonardis et al. "An EMG-Controlled Robotic Hand Exoskeleton for Bilateral Rehabilitation," in IEEE Transactions on Haptics, vol. 8, no. 2, pp. 140-151, 1 April-June 2015.
[36]. Y. Zhou, T. Desplenter, S. Chinchalkar and A. L. Trejos, "A Wearable Mechatronic Glove for Resistive Hand Therapy Exercises," 2019 IEEE 16th International Conference on Rehabilitation Robotics (ICORR), Toronto, ON, Canada, 2019, pp. 1097-1102.
[37]. P. M. Aubin, H. Sallum, C. Walsh, L. Stirling and A. Correia, "A pediatric robotic thumb exoskeleton for at-home rehabilitation: The Isolated Orthosis for Thumb Actuation (IOTA)," 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 2013, pp. 1-6, doi: 10.1109/ICORR.2013.6650500.
[38]. Lu Z, Tong KY, Shin H, Li S, Zhou P. Advanced Myoelectric Control for Robotic Hand-Assisted Training: Outcome from a Stroke Patient. Front Neurol. 2017 Mar 20;8:107.
[39]. C. Meeker, S. Park, L. Bishop, J. Stein and M. Ciocarlie, "EMG pattern classification to control a hand orthosis for functional grasp assistance after stroke," 2017 International Conference on Rehabilitation Robotics (ICORR), London, UK, 2017, pp. 1203-1210 .
[40]. M. A. Delph, S. A. Fischer, P. W. Gauthier, C. H. M. Luna, E. A. Clancy and G. S. Fischer, "A soft robotic exomusculature glove with integrated sEMG sensing for hand rehabilitation," 2013 IEEE 13th International Conference on Rehabilitation Robotics (ICORR), Seattle, WA, USA, 2013, pp. 1-7.
[41]. Sandoval-Gonzalez O, Jacinto-Villegas J, Herrera-Aguilar I, et al. Design and Development of a Hand Exoskeleton Robot for Active and Passive Rehabilitation. International Journal of Advanced Robotic Systems. 2016;13(2).
[42]. Haghshenas-Jaryani, M, Nothnagle, C, Patterson, RM, Bugnariu, N, & Wijesundara, MBJ. "Soft Robotic Rehabilitation Exoskeleton (REHAB Glove) for Hand Therapy." Proceedings of the ASME 2017 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Volume 3: 19th International Conference on Advanced Vehicle Technologies; 14th International Conference on Design Education; 10th Frontiers in Biomedical Devices. Cleveland, Ohio, USA. August 6–9, 2017. V003T13A005. ASME. https://doi.org/10.1115/DETC2017-68291
[43]. Y. Fu, Q. Zhang, F. Zhang and Z. Gan, "Design and development of a hand rehabilitation robot for patient-cooperative therapy following stroke," 2011 IEEE International Conference on Mechatronics and Automation, Beijing, China, 2011, pp. 112-117.
[44]. Motus Nova Stroke Rehab Recovery at Home.Available online:https://motusnova.com/hand/.(accessed on 26 February 2024).
[45]. J. M. Ochoa, Yicheng Jia, D. Narasimhan and D. G. Kamper, "Development of a portable actuated orthotic glove to facilitate gross extension of the digits for therapeutic training after stroke," 2009 Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Minneapolis, MN, USA, 2009, pp. 6918-6921.
[46]. Xie Q, Meng Q, Yu W, Wu Z, Xu R, Zeng Q, Zhou Z, Yang T, Yu H. Design of a SMA-based soft composite structure for wearable rehabilitation gloves. Front Neurorobot. 2023 Feb 10;17:1047493.
[47]. Kabir R, Sunny MSH, Ahmed HU, Rahman MH. Hand Rehabilitation Devices: A Comprehensive Systematic Review. Micromachines (Basel). 2022 Jun 29;13(7):1033.
[48]. Y. Zhang, Z. Song and R. Fu, "Hand exoskeleton for rehabilitation using a flexible screw mechanism," 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO), Koh Samui, Thailand, 2023, pp. 1-6.