






1. Introduction
Pipeline applications are widely used in the energy and chemical industry. They are mainly used to transport liquid and gas substances such as oil and natural gas. These substances are extremely flammable and explosive. Once the pipeline is aged or cracked, it will cause very serious consequences, such as environmental pollution and energy leakage. Therefore, it is necessary to regularly inspect these underground or submarine pipelines. When inspecting such pipelines, both external and internal inspections are required. For external inspection, buried pipelines need to be dug up, while internal inspection requires manual entry into the pipelines. During this process, there is numerous potential risk, especially manual entry into the pipelines even requires disconnection of the transmission of substances in the pipelines, which delays life and production. The situation in closed pipelines is changeable and complicated. If there is residual natural gas, it will also endanger the lives of workers. It costs a lot to inspect these dangerous pipelines, wasting a lot of unnecessary resources.
In order to solve these problems, the snake-like robot has become a perfect solution. First, the residue of harmful gases will not interfere with the normal operation of the snake-like robot. Moreover, pipeline inspection can be performed without disconnecting the gas transmission. Secondly, the snake-like robot has the ability to imitate the crawling of snakes and can easily enter narrow pipelines that humans cannot enter. And it adapts to complex pipeline conditions and has unique advantages in some maze-like pipelines. The snake-like robot uses various sensors and cameras to monitor the situation inside the pipeline in real time. The infrared sensor can even achieve automatic obstacle avoidance inside the pipeline. The ultrasonic sensor can then capture some damage that cannot be observed by the naked eye and feedback to the operator for timely repair.
2. Application and technical analysis of snake-like robots in pipeline inspection
Application and technical analysis of snake-like robots in pipeline inspection are widely used in energy, chemical industry, urban sewage pipelines and other fields. The complex structure and narrow space of pipelines make traditional manual inspection challenging. Snake-like robots have become a crucial technology for pipeline inspection due to their flexibility and mobility. In pipeline inspection, the snake-like robot needs to have flexible mobility. It not only needs to be equipped with a high-definition camera, but also needs to have a high-pressure water gun to clean the blocked pipeline. Many pipelines have very strong corrosive and oily dirt, so the snake-like robot should be corrosion-resistant and have sufficient waterproof performance.
The following section will cover several aspects of snake-like robots: their technical principles, structural design, and application scenarios. This paper will discuss how to implement pipeline detection applications and mechanical structure design. Additionally, this paper will compare the advantages of snake-like robots.
2.1. Technical principle and structural design of snake-like robot
The snake-like robot's bionic design principle draws inspiration from the movement patterns of real snakes. Snakes have extremely high adaptability in different environments, which is mainly due to the very flexible and highly maneuverable body of snakes. In the snake-like robot, a modular structure is needed to simulate each joint of the snake's body, and the crawling action of the snake is simulated through the coordinated movement of multiple joints. In order to further enhance the robot's bionic ability, flexible drive can also be used to more accurately control each movement angle and force. The flexible drive system can enhance the adaptability of the snake-like robot in complex pipes, but waterproof and corrosion-resistant materials must be used. The team used nylon and polyester fibers as the skin of the snake-like robot [1].The flexible drive system as shown in Figure 1.

Figure 1: View of a snake robot climbing the inside of a pipe [1]
Snake-like robots mimic the movement patterns of real snakes, primarily exhibiting linear, lateral, and oblique motions. Linear motion is suitable for smooth pipes because it does not rely on the friction of the pipe wall, thus achieving efficient movement. Lateral motion, which is the most prevalent among snake movements, necessitates the coordinated action of all the snake's joints to propel itself forward using friction between its body and the pipe wall. When encountering obstacles in the pipe, the snake-like robot can avoid obstacles by lateral movement. These motion controls require a high degree of coordination of each module of the snake-like robot to complete. In actual movement, the robot relies on algorithms to combine various motion patterns. This theory proposes a unified motion design method for the movement control of snake-like robots in complex pipe structures. The study solves the movement problems of snake-like robots when passing through different obstacles in the pipe, including bends, diameter changes and blockages [2].
When a snake-like robot works in a pipeline, in addition to flexible motion patterns and a flexible drive system, it also needs to have a positioning function. In a complex and tight pipeline, if the position of the snake-like robot cannot be obtained, the progress of the work inside will be unknown, which will also make it very difficult for the robot to be recovered. Therefore, the snake-like robot must have a powerful positioning system, and there are many different solutions. This study explores a navigation method for snake-like robots utilizing micro-electromechanical system (MEMS) inertial measurement unit (IMU) technology. The article provides a solution to the positioning problem in the pipeline environment by establishing a kinematic model and using the extended Kalman filter (EKF) for positioning. Experimental results show that the positioning error of this method is less than 5% of the total stroke [3]. Given that sound propagates easily through pipelines, an alternative solution involves utilizing an online positioning method based on acoustic principles. This method is very suitable for snake-like robots working in pipelines. Since the GPS positioning system cannot be used in pipelines, this solution that combines sound source positioning and inertial measurement units achieves another efficient online positioning and navigation [4].
In addition to positioning and navigation functions, bionic robots require perception and vision capabilities to operate effectively in pipelines. Through high-definition cameras, ultrasonic, infrared and other sensors, the robot can obtain image information inside the pipeline and the damage of the pipeline wall. In the task of inspecting the pipeline, the snake-like robot can use high-definition cameras to obtain the corrosion and damage in the pipeline, and feedback the location and degree of damage to the operator in real time. This study highlights the snake-like robot's vision and perception system, as well as its ability to plan routes in complex environments using this advanced perception system [5]. With the assistance of ultrasonic and infrared sensors, during the autonomous navigation process, the snake-like robot can identify obstacles inside the pipeline in real time and formulate a route to bypass the obstacles to complete the work. The perception-driven obstacle-assisted motion (POAL) is used in the snake-like robot. This document focuses on how to identify obstacles in the surrounding environment through the perception system and use these obstacles to help the robot move. This technology is of great significance in pipeline rescue [6].
Energy supply and network communication are essential components for snake robots operating in pipelines. Especially during long-term pipeline tasks, sufficient energy is needed to support the work of the robot. In terms of energy, lithium batteries and fuel can be used as energy support, but using fuel in pipelines will lack air to support combustion, especially when working in pipelines filled with flammable gases. While fuel-driven systems cannot ensure the robot's safety, lithium batteries also struggle to meet the long-term operational needs of snake-like robots in pipelines. Therefore, the energy system must be efficiently managed to ensure that the robot can use less power to complete long-term pipeline tasks. Studies have shown that the motion control and power consumption of robots can be optimized by using an electrical control system. Research has shown that snake-like robots consume more energy when traversing long distances and navigating complex environments. However, by enhancing motion strategies and control algorithms, significant improvements in energy efficiency can be achieved [7]. Energy saving through chain structure as shown in Figure 2. Energy management systems usually dynamically allocate energy based on the robot's working status. When the robot is moving, the energy system will give priority to providing power to the motion module, and when the robot stops for detection, it will provide more energy to the sensor system. This intelligent energy distribution strategy can significantly improve the robot's working efficiency and reduce energy consumption. Alongside power supply, network communication plays a crucial role in snake-like robot operations. Maintain real-time communication with external operators and control centers through wireless communication technology, and can also transmit various conditions in the pipeline in real time through high-definition cameras to further analyze how to maintain the pipeline. The article examines the snake-like robot's wireless communication system, emphasizing Wi-Fi-based methods for remote control and data transmission. It was also discussed how to maintain communication stability under low signal strength and complex environments to ensure the reliability of autonomous robot navigation [8].
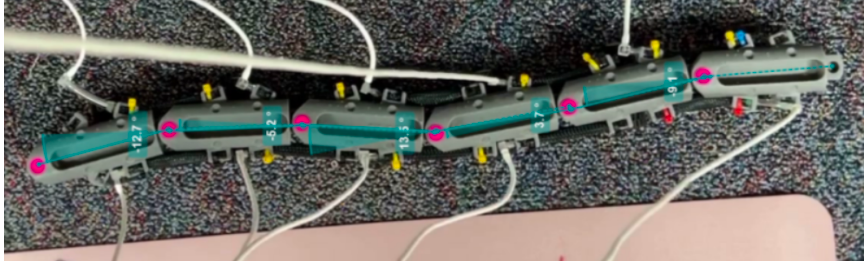
Figure 2: The 6-link mechanism with annotations [7]
2.2. Application scenarios and advantages of snake-like robots in different fields
Detecting the condition of oil and gas pipelines is very important for transporting this type of energy. Conventional pipeline inspection methods typically involve manual interior examinations or external equipment-based assessments. Manual inspection of natural gas pipelines carries significant risks. Even after shutting off the gas supply, residual gas in the pipeline poses a severe health hazard to inspectors. These pipelines are usually deep sea or underground, and traditional detection methods have many challenges. The snake robot can make up for these shortcomings. Its flexibility allows it to enter complex pipeline environments for all-round inspection. Snake robots can navigate through various pipeline configurations, including smooth sections, bends, vertical segments, and T-shaped junctions. It can obtain information in the pipeline through high-definition cameras and various sensors. This information is fed back in real time through the communication system of the snake robot to various conditions in the pipeline, locate and mark the broken locations, and facilitate maintenance personnel to directly perform maintenance [9].
In the cities where this paper live every day, there is a very complex urban water supply system. The urban water supply system is an underground network, usually composed of multiple pipes, which are responsible for providing clean water to millions of residents. If a pipe in these water supply networks is damaged, people cannot find the gap in time, and an inestimable amount of water will flow into the underground, so regular inspections are required. However, traditional inspection methods usually require large-scale excavation, which is time-consuming and labor-intensive and will affect the normal operation of the city. At this time, the advantages of snake-like robots are very obvious. In contrast to conventional approaches, snake-like robots can directly access and inspect the pipe's interior from the entrance. It does not require large-scale excavation, thereby minimizing damage to urban roads and infrastructure. Using snake-like robots for regular water pipe inspections can immediately find which water pipe is leaking at which location, and the water company can also repair it immediately, thus saving a lot of water resources. This document introduces the application of snake-like robots in water supply pipes [10].The way the snake-like robot moves in the pipe belt is shown in the Figure 3.
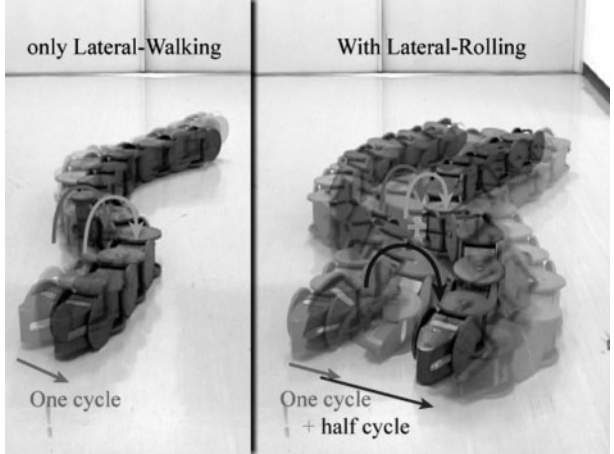
Figure 3: Lateral-walking with lateral-rolling in serpentine Posture [10]
In the chemical industry, pipelines are often used to transport high-temperature, high-pressure or toxic chemicals. Leaks of these hazardous materials can lead to severe consequences, including land contamination and, more critically, water resource pollution. The leakage of certain chemical gases may even cause explosions. These dangerous pipelines are usually not suitable for manual entry and inspection, but snake-like robots can easily enter such pipelines. The high-temperature and corrosion-resistant properties of snake-like robots enable them to operate safely in harsh environments characterized by extreme temperatures, high pressures, and toxic gases. In these dangerous pipelines, snake-like robots can check whether there are cracks in the pipelines, and detect whether there are gas leaks through the sensors they are equipped with, and monitor these data in real time. Once a leak is found, the snake-like robot can instantly transmit the detected pipeline data to external maintenance personnel through the wireless communication system. In this way, engineers can remotely monitor the progress of the inspection and stop using the pipeline as soon as a leak occurs, avoiding the occurrence of dangerous accidents [11].
3. Conclusion
Thanks to its flexible articulated structure and adaptable movement capabilities, the snake-like robot has revolutionized pipeline inspection. These devices have successfully replaced hazardous manual inspections, significantly reducing both operational costs and safety risks for pipeline workers. Pipeline inspectors can now remotely control these robots equipped with high-definition cameras and sensors for inspection and maintenance. The obtained images enable them to make informed decisions about necessary repairs. They no longer need to dig up the pipelines for inspection, which improves work efficiency.
In future development, snake-like robots will be connected to artificial intelligence technology, self-learn in the inspection pipeline, and judge what degree of damage needs to be repaired. Snake-like robots will be equipped with welding equipment, which will significantly enhance their autonomous maintenance capabilities. They will use laser radar to work with high-definition cameras to achieve fully automatic inspection and maintenance of pipelines. This means that future snake-like robots will operate with minimal human intervention while still maintaining necessary oversight. They can design pipeline maintenance plans on their own and use their own welding equipment for maintenance. Traditional high-density lithium batteries will be replaced by hydrogen fuel cells to extend the working time of snake-like robots and support higher-power equipment. At the same time, hydrogen energy will not cause any pollution to the environment, promoting sustainable development of energy.
References
[1]. Wright, C., Johnson, A., Peck, A., McCord, Z., Naaktgeboren, A., Gianfortoni, P., & Choset, H. (2007). Design of a modular snake robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2609-2614).
[2]. Frontiers. (2023). Unified approach to the motion design for a snake robot negotiating complicated pipe structures. Frontiers in Robotics and AI. https://doi.org/10.3389/frobt.2023.00001
[3]. Dou, L., Su, Z., & Liu, N. (2018). Study of the navigation method for a snake robot based on the kinematics model with MEMS IMU. Sensors, 18(3), 879-892. https://doi.org/10.3390/s18030879
[4]. Zang, Y., & Gao, Z. (2024). Bio-inspired multimodal motion gait control of snake robots with environmental adaptability based on ROS. Electronics, 13(17), 3437-3452. https://doi.org/10.3390/electronics13173437
[5]. Woszczyk, J., & Sanfilippo, F. (2022). The redesigned Serpens, a low-cost, highly compliant snake robot. Robotics, 11(2), 42-58. https://doi.org/10.3390/robotics11020042
[6]. Liljebäck, P., & Stavdahl, Ø. (2017). Perception-driven obstacle-aided locomotion for snake robots: The state of the art, challenges and possibilities. Applied Sciences, 7(4), 336-352.
[7]. Haghshenas-Jaryani, M., & Lopez, M. (2023). A study of energy-efficient and optimal locomotion in a pneumatic artificial muscle-driven snake robot. Robotics, 12(3), 89-102. https://doi.org/10.3390/robotics12030089
[8]. Rider, M., Hjelme, D. R., & Oelmann, B. (2019). Autonomous navigation and wireless communication for snake robots. Journal of Robotics and Automation, 12(3), 102-115. https://doi.org/10.1109/JRA.2019.0123456
[9]. Rollinson, D., & Choset, H. (2016). Pipe crawling using a snake robot. Advanced Robotics, 30(12), 785-801. https://doi.org/10.1080/01691864.2016.1164621
[10]. Mori, M., & Hirose, S. (2006). Locomotion of 3D Snake-Like Robots – Shifting and Rolling Control of Active Cord Mechanism ACM-R3. Journal of Robotics and Mechatronics, 18(5), 521-528.
[11]. McKenna, J. D., & Martinez, J. J. (2019). Real-time monitoring of chemical pipelines using snake robots. Chemical Engineering Journal, 376, 120-131. https://doi.org/10.1016/j.cej.2018.12.063
Cite this article
Mai,J. (2025). Application of Snake-Like Robot in Pipeline Inspection. Applied and Computational Engineering,127,148-153.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 5th International Conference on Materials Chemistry and Environmental Engineering
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Wright, C., Johnson, A., Peck, A., McCord, Z., Naaktgeboren, A., Gianfortoni, P., & Choset, H. (2007). Design of a modular snake robot. In Proceedings of the IEEE/RSJ International Conference on Intelligent Robots and Systems (pp. 2609-2614).
[2]. Frontiers. (2023). Unified approach to the motion design for a snake robot negotiating complicated pipe structures. Frontiers in Robotics and AI. https://doi.org/10.3389/frobt.2023.00001
[3]. Dou, L., Su, Z., & Liu, N. (2018). Study of the navigation method for a snake robot based on the kinematics model with MEMS IMU. Sensors, 18(3), 879-892. https://doi.org/10.3390/s18030879
[4]. Zang, Y., & Gao, Z. (2024). Bio-inspired multimodal motion gait control of snake robots with environmental adaptability based on ROS. Electronics, 13(17), 3437-3452. https://doi.org/10.3390/electronics13173437
[5]. Woszczyk, J., & Sanfilippo, F. (2022). The redesigned Serpens, a low-cost, highly compliant snake robot. Robotics, 11(2), 42-58. https://doi.org/10.3390/robotics11020042
[6]. Liljebäck, P., & Stavdahl, Ø. (2017). Perception-driven obstacle-aided locomotion for snake robots: The state of the art, challenges and possibilities. Applied Sciences, 7(4), 336-352.
[7]. Haghshenas-Jaryani, M., & Lopez, M. (2023). A study of energy-efficient and optimal locomotion in a pneumatic artificial muscle-driven snake robot. Robotics, 12(3), 89-102. https://doi.org/10.3390/robotics12030089
[8]. Rider, M., Hjelme, D. R., & Oelmann, B. (2019). Autonomous navigation and wireless communication for snake robots. Journal of Robotics and Automation, 12(3), 102-115. https://doi.org/10.1109/JRA.2019.0123456
[9]. Rollinson, D., & Choset, H. (2016). Pipe crawling using a snake robot. Advanced Robotics, 30(12), 785-801. https://doi.org/10.1080/01691864.2016.1164621
[10]. Mori, M., & Hirose, S. (2006). Locomotion of 3D Snake-Like Robots – Shifting and Rolling Control of Active Cord Mechanism ACM-R3. Journal of Robotics and Mechatronics, 18(5), 521-528.
[11]. McKenna, J. D., & Martinez, J. J. (2019). Real-time monitoring of chemical pipelines using snake robots. Chemical Engineering Journal, 376, 120-131. https://doi.org/10.1016/j.cej.2018.12.063