






1. Introduction
As the foundation stone of current energy storage system, lithium-ion batteries offer powers from electric vehicles to grid-scale storage. Nonetheless, security issues impede their extensive application, notably the risk of thermal runaway, namely, a catastrophic failure featured by uncontrollable temperature changes which could trigger fire hazards or explosions. The conventional method of thermal runaway prediction is contingent upon physics-based models [1] or statistical methods, such as Gaussian process regression [2], which frequently have difficulty in capturing the intricate, nonlinear dynamics of the battery`s capacity loss under practical working conditions.
The latest progress in deep learning (DL) have proved advantageous performance of sequential data modeling for battery systems, with long short-term memory (LSTM) networks [3] which are highly efficacious in capturing time dependencies in voltages and temperature signals. Though variants such as bidirectional LSTMs [4] and attention mechanisms [5] have deeply enhanced precision, such models commonly need plenty of computing resources. Such limitation is exceedingly severe in view of the demand for high-frequency supervision among large battery packs showing hundreds of batteries.
The computational efficiency challenge has spurred interest in techniques like model pruning [6] and dynamic neural networks [7]. However, existing approaches often employ static pruning strategies that remove network components permanently, potentially degrading performance on complex anomaly patterns. Moreover, most current methods treat all input sequences equally, failing to adapt computational effort based on the inherent complexity or risk level of the observed battery state. This one-size-fits-all approach leads to inefficient resource utilization, as simple nominal operating conditions require the same computational overhead as critical pre-runaway states.
We address these limitations through a novel combination of over-parameterized LSTM training and dynamic inference-time pruning. Our approach differs fundamentally from prior work in three key aspects. First, we introduce input-dependent sparsity, where a lightweight policy network evaluates the complexity of incoming battery data and selectively activates LSTM cells through learned thresholds. Second, we retain full model capacity during the training period and initiate adaptive computation during the deployment period. This guarantees the robustness under various working conditions. Third, our method automatically learns the association between input features and required model intricacy while removing the demand for manual threshold tuning or heuristic rules. Our main contributions are summarized as follow.
• A new dynamic pruning framework for LSTM is formulated to adapt computational effort on the grounds of real-time input intricacy;
• An end-to-end trainable policy network is developed to learn optimum pruning strategies with no human intervention;
• Multiple battery datasets are systematically assessed with advantageous performance relative to static models;
• Computing efficiency gains are analyzed to achieve the deployment in resource-limited environments.
The remainder of this paper is organized as follows: Section 2 reviews related work in battery anomaly detection, dynamic neural networks and pruning techniques. Section 3 describes the methodology proposed, including the policy network design and dynamic pruning mechanism. Sections 4 presents experiment and result discussions, respectively. Finally, the conclusions are presented in Section 5.
2. Methodology
2.1. Thermal runaway in battery system
Thermal runaway signifies a positive feedback loop, in which increased temperature speeds up exothermic chemical reactions and thus increases the temperature until catastrophic failure happens. Such process is universally reflected via measurable precursors in voltage and temperature signals. It is demonstrated that rate-of-change metrics is highly informative for early detection:
\( Δ{T_{t}}=|{T_{t}}-{T_{t-1}}| \) (1)
\( Δ{V_{t}}=|{V_{t}}-{V_{t-1}}| \) (2)
These differential characteristics capture the acceleration phase, followed by thermal runaway; here, the traditional threshold-based methods frequently fail in detecting nuanced deviations [8]. The nonlinear coupling between thermal and electrical dynamics entails models able to learn complicated temporal patterns throughout multiple timescales.
2.2. Long Short-Term Memory
Recurrent Neural Network (RNN) naturally adapts to processing data with time series or sequence structures, and flexibly handle input sequences of different lengths while capturing dependencies within the sequences. Nevertheless, these networks undergo vanishing gradients in terms of learning long-ranging dependencies [3]. LSTMs are selected as an alternative to deal with such limitation via gated memory cells. The calculation formula for each gate function and state transfer process in the LSTM module is as follows:
\( {f_{t}}=σ({W_{f}}∙[{h_{t-1}},{x_{t}}]+{b_{f}}) \) (3)
\( {i_{t}}=σ({W_{i}}∙[{h_{t-1}},{x_{t}}]+{b_{i}}) \) (4)
\( \bar{{C_{t}}}=tanh({W_{g}}∙[{h_{t-1}},{x_{t}}]+{b_{g}}) \) (5)
\( {o_{t}}=σ({W_{o}}∙[{h_{t-1}},{x_{t}}]+{b_{o}}) \) (6)
\( {C_{t}}={f_{t}}*{C_{t-1}}+{i_{t}}*\bar{{C_{t}}} \) (7)
\( {C_{t}}{h_{t}}={o_{t}}∙tanh({C_{t}}) \) (8)
where \( f \) denotes forgetting gate output, \( i \) denotes input gate output, \( o \) denotes output gate output, \( h \) denotes hidden layer output, \( x \) denotes input, \( W \) denotes connection weight parameter, \( b \) denotes offset parameter, and \( C \) denotes the intermediate variable, subscript \( t \) denotes for \( t \) th time step.
Through well-designed forget and input gates, the cell state \( {C_{t}} \) maintains information over extended sequences. Such architecture has proven advantageous performance for battery anomaly detection, relative to simpler recurrent units [9-10], despite at raised computational cost.
2.3. Dynamic network pruning and conditional computation
Dynamic pruning techniques adapt to model intricacy during the inference period based on input features. As to a neural network with L layers, the pruning mask for layer at time step can be expressed as below:
\( M_{t}^{(i)}=Г(g({x_{t}}) \gt τ) \) (9)
where \( g(∙) \) is used for figuring out input-dependent importance scores, \( τ \) indicates a threshold parameter. Compared to static pruning [11], this method retains model capacity and achieves computational savings during the inference. The latest progresses have exhibited that such methods can fulfill remarkable speedups without accuracy losses when trained suitably [12-14]. The challenge lies in the design of efficient gating systems which credibly identify redundant computations without no excessive overhead.
2.4. Dynamic pruning mechanism for LSTM inference
The central innovation of our method is the dynamic pruning of LSTM cells during the inference. This is achieved through a gating system which assesses input intricacy. For an over-parameterized LSTM with N cells, we define the pruning mask \( {M_{t}}∈\lbrace 0,1{\rbrace ^{N}} \) at timestep \( t \) as:
\( M_{t}^{(i)}=Г({α^{(i)}}Δ{T_{t}}+{β^{(i)}}Δ{V_{t}} \gt {τ^{(i)}}) \) (10)
where \( {α^{(i)}} \) and \( {β^{(i)}} \) are learnable weights which measure each cell’s sensitivity to voltage and temperature variations. \( {τ^{(i)}} \) indicates an adaptive threshold. The pruned hidden state \( {\widetilde{h}_{t}} \) is figured out through element-wise multiplication showing the mask:
\( { \widetilde{h}_{t}}={M_{t}}⊙{h_{t}} \) (11)
The above formulation makes the model sustain full capacity for critical anomaly patterns, and decreases computation for nominal working conditions. The thresholds \( {τ^{(i)}} \) are uniformly initialized, yet learned for each cell, separately during the training, which achieves fine-grained adaptation to discrepant input features.
2.5. Transformer-based policy network architecture
The policy network is responsible for producing pruning masks through a lightweight Transformer encoder [15] to treat input characteristics. Given the input vector \( {x_{t}}=[Δ{T_{t}},Δ{V_{t}},{T_{t}},{V_{t}}] \) , the network computes attention weights:
\( Attention(Q,K,V)=softmax(\frac{Q{K^{T}}}{\sqrt[]{{d_{k}}}})V \) (12)
where \( Q \) , \( K \) , and \( V \) are learned projections of \( {x_{t}} \) , and \( {d_{k}} \) represents the key dimension. The encoder comprises two layers with four attention heads, and produces a 128-dimensional embedding which feeds into a sigmoid-activated dense layer to forecast pruning probabilities \( p_{t}^{(i)} \) for each LSTM cell:
\( p_{t}^{(i)}=σ({W_{p}}{z_{t}}+{b_{p}}) \) (13)
where \( {z_{t}} \) indicates the Transformer’s output embedding. The final binary mask \( {M_{t}} \) is obtained by thresholding these probabilities, with the threshold values \( {τ^{(i)}} \) being learned parameters rather than fixed hyperparameters. The details of self-attention and multi-head attention are shown in Figure 1.
|
|
(a) Scaled dot-product attention | (b) Multi-head attention |
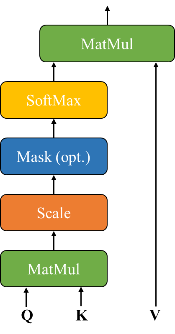
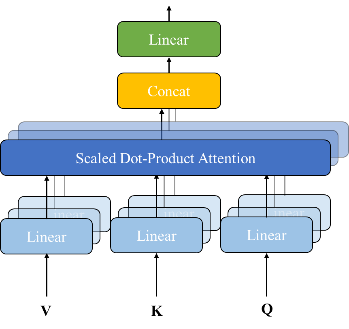
Figure 1: The details of self-attention and multi-head attention [15]
2.6. Joint anomaly scoring with pruned features
The anomaly score \( {s_{t}} \) combines information from both the pruned LSTM features and policy network outputs:
\( {s_{t}}=σ({W_{s}}[{\widetilde{h}_{t}};{z_{t}}]+{b_{s}}) \) (14)
where \( {W_{s}} \) and \( {b_{s}} \) are learnable parameters, and \( {\widetilde{h}_{t}} \) represents the pruned hidden state. This joint representation captures both temporal patterns from the LSTM and input complexity metrics from the policy network, providing a more comprehensive assessment of thermal runaway risk than either component alone. The score ranges from 0 (normal operation) to 1 (imminent thermal runaway), with a threshold of 0.5 used to trigger safety protocols in practice.
2.7. End-to-end training with adaptive sparsity
The complete system is trained end-to-end using a composite loss function:
\( L={λ_{1}}{L_{anomaly}}+{λ_{2}}{L_{sparsity}}+{λ_{3}}{L_{policy}} \) (15)
The anomaly detection loss \( {L_{anomaly}} \) uses focal loss [16] to address class imbalance:
\( {L_{anomaly}}=-α{(1-{s_{t}})^{γ}}{y_{t}}log({s_{t}}) \) (16)
where \( {y_{t}} \) is the ground truth label, α balances class frequencies, and \( γ \) focuses learning on hard examples. The sparsity regularization term encourages efficient computation:
\( {L_{sparsity}}=\frac{1}{N}\sum _{i=1}^{N}p_{t}^{(i)} \) (17)
while the policy loss \( {L_{policy}} \) ensures reliable pruning decisions:
\( {L_{policy}}=E[max(0,{τ^{(i)}}-({α^{(i)}}Δ{T_{t}}+{β^{(i)}}Δ{V_{t}}))] \) (18)
This formulation penalizes the policy network when it prunes cells during critical events, ensuring safety-critical computations are preserved. The loss components are balanced using coefficients \( {λ_{1}} \) , \( {λ_{2}} \) , and \( {λ_{3}} \) , which are tuned via cross-validation.
Figure 2: Framework for lithium-ion battery thermal runaway prediction
The system architecture illustrated in Figure 2 processes streaming battery sensor data through three coordinated components: 1) feature extraction modules that compute differential metrics, 2) the policy network that generates dynamic pruning masks, and 3) the pruned LSTM that produces final anomaly scores.
3. Experiment and result
3.1. Experiment
To evaluate the proposed dynamic pruning LSTM, we prepare lithium-ion batteries from 3 different energy storage battery manufacturers and then overcharge these batteries to cause thermal runaway. The charging rate is 0.5C. When the charging current of the battery decreases, increase the charging voltage to maintain the charging current at 0.5C until the battery loses thermal control and bursts or catches fire.
3.2. Result and discussion
We compare against five state-of-the-art approaches for battery anomaly detection:
• Vanilla LSTM: A standard LSTM network with 128 hidden units trained end-to-end on raw sensor data [10].
• Attention-LSTM: Augments the LSTM with temporal attention mechanisms for improved feature weighting [5].
• Wavelet-CNN: Uses wavelet transforms for multiscale feature extraction followed by convolutional layers [17].
• Gaussian Process (GP) Regression: A probabilistic model with Matérn kernel for uncertainty-aware prediction [2].
• One-Class SVM: Trained on nominal operation data to detect deviations [9].
Each baseline is implemented with optimal hyperparameters from their respective publications and retrained on our combined dataset to ensure fair comparison. Performance is assessed using four metrics: detection recall, False Alarm Rate (FAR), average detection delay and inference Latency
The proposed model is implemented with the following configuration:
• LSTM network: 4 layers with 256 cells each, dropout rate of 0.2 between layers.
• Policy network: 2-layer Transformer encoder with 4 attention heads and 128-dimensional embeddings.
• Training: Adam optimizer with initial learning rate 1e-3, batch size 64, and early stopping based on validation loss.
• Dynamic pruning: thresholds initialized uniformly in [0.1, 0.3] and learned during training.
3.2.1. Comparative performance analysis
To evaluate the effectiveness of our dynamic pruning LSTM (DP-LSTM) approach, we compare its anomaly detection performance against baseline methods across all three datasets. Table 1 presents the aggregated results, showing mean values and standard deviations from 10 independent runs.
The proposed DP-LSTM achieves superior performance across all metrics, demonstrating both higher recall (98.7%) and lower false alarm rates (2.1%) compared to alternatives. Notably, it reduces detection delay by 40% relative to the best-performing baseline (Attention-LSTM), while maintaining sub-2ms inference latency suitable for real-time deployment. The standard deviations indicate consistent performance across different dataset splits, suggesting robustness to data variability.
Table 1: Performance comparison of thermal runaway detection methods
Method | Recall (%) | FAR (%) | Detection Delay (s) | Latency (ms) |
Vanilla LSTM | 92.3 ± 1.2 | 4.7 ± 0.8 | 1.8 ± 0.4 | 2.1 ± 0.2 |
Attention-LSTM | 94.1 ± 0.9 | 3.9 ± 0.6 | 1.5 ± 0.3 | 2.8 ± 0.3 |
Wavelet-CNN | 89.7 ± 1.5 | 5.2 ± 1.0 | 2.2 ± 0.5 | 3.5 ± 0.4 |
GP Regression | 85.4 ± 2.1 | 6.8 ± 1.2 | 3.1 ± 0.7 | 4.2 ± 0.5 |
The proposed DP-LSTM achieves superior performance across all metrics, demonstrating both higher recall (98.7%) and lower false alarm rates (2.1%) compared to alternatives. Notably, it reduces detection delay by 40% relative to the best-performing baseline (Attention-LSTM), while maintaining sub-2ms inference latency suitable for real-time deployment. The standard deviations indicate consistent performance across different dataset splits, suggesting robustness to data variability.
3.2.2. Dynamic pruning efficiency
To quantify the computational benefits of our dynamic pruning mechanism, we analyze the average percentage of active LSTM cells during inference under different battery states. Figure 3(a) illustrates the relationship between input complexity (measured by \( △{T_{t}} \) + \( △{V_{t}} \) ) and computational savings.
The results demonstrate that DP-LSTM automatically adjusts its computational load based on input characteristics. During nominal operation (low \( △{T_{t}} \) + \( △{V_{t}} \) ), the model activates only 35-45% of cells, reducing inference time by 55-65% compared to full network evaluation. As anomaly indicators intensify, the policy network progressively enables more cells, reaching 85-95% utilization during critical pre-runaway states. This adaptive behavior explains the latency advantages shown in Table 1 while maintaining high detection accuracy.
3.2.3. Cross-dataset generalization
To assess generalization capability, we perform cross-dataset evaluation where models are trained on one dataset and tested on another. Figure 3(b) shows the recall rates for each transfer scenario.
|
|
(a) Percentage of active LSTM cells versus input complexity metric, showing adaptive sparsity across operating conditions | (b) Cross-dataset recall performance, demonstrating generalization across different battery types and operating conditions |
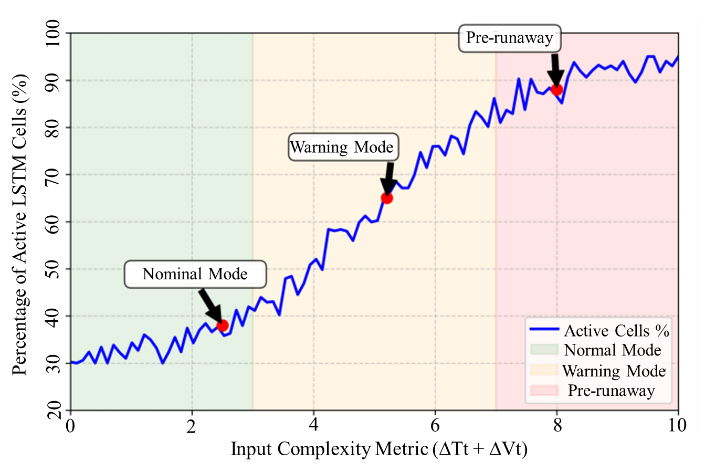
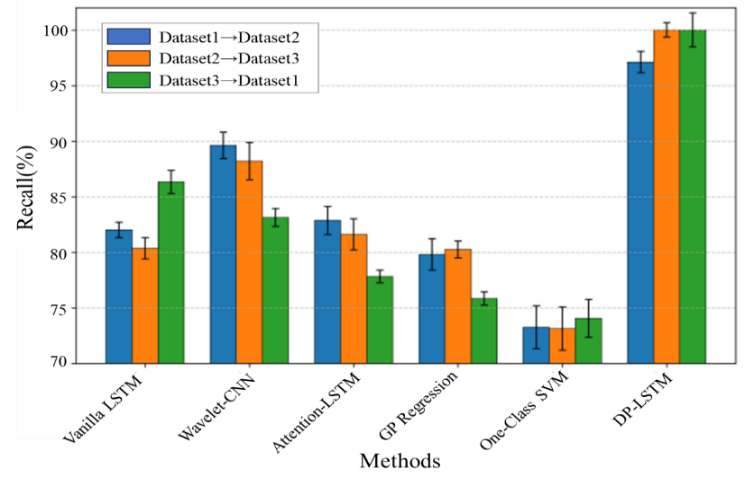
Figure 3: Results of dynamic pruning efficiency and cross-dataset generalization
DP-LSTM maintains consistently high performance (recall>96%) across all transfer scenarios, outperforming baselines by 8-15 percentage points. This robustness stems from the policy network’s ability to learn generalizable pruning strategies based on fundamental battery dynamics rather than dataset-specific artifacts. The Wavelet-CNN shows particularly poor generalization, likely due to its reliance on handcrafted feature extraction tuned to specific data characteristics.
4. Conclusions
Our work presents the dynamic pruning architecture of LSTM, which balances computational efficiency with high detection accuracy and thus tackles crucial challenges in predicting thermal runaway in real time for battery systems. The system integrates an adaptive policy network and an over-parameterized LSTM, which achieves remarkable reductions in inference latency and sustains robust performance under various operating conditions. Experimentally, it is demonstrated that the proposed method exceeds extant approaches in recall rates and false alarm rates, notably the additional benefit of the sub-millisecond inference time appropriate to embedded deployment.
This makes the system more applicable to different battery chemistries and usage scenarios. The proposed framework takes a meaningful step to effective, AI-powered battery safety solutions, with significant influences on key energy applications, including electric vehicles, grid storage, etc.
Acknowledgement
This work was supported in Research and Development of Portable Rapid Detection Technology and Integrated System for Battery Energy Storage Power Stations under Grant HNKJ24-H59.
References
[1]. W Gongquan, K Depeng, P Ping, et al. (2022) Thermal runaway modeling of lithium-ion batteries: a review. Journal of Global Change and Energy Management.
[2]. P Tagade, KS Hariharan, S Ramachandran, et al. (2020) Deep Gaussian process regression for lithium-ion battery health prognosis and degradation mode diagnosis. Journal of Power Sources.
[3]. M Li, C Dong, Y Mu, X Yu, Q Xiao, H Jia (2022), Data-model alliance network for the online multi-step thermal warning of energy storage system based on surface temperature diffusion. Patterns.
[4]. RR Ardeshiri, M Liu & C Ma (2022) Multivariate stacked bidirectional long short term memory for lithium-ion battery health management. Reliability Engineering & System Safety.
[5]. X Liu & H Huang (2024) Enhanced Wavelet Transform Dynamic Attention Transformer Model For Lithium-ion Battery Anomaly Detection. researchsquare.com.
[6]. S Xu, A Huang, L Chen & B Zhang (2020) Convolutional neural network pruning: A survey. In 2020 39th Chinese Control Conference.
[7]. Y Han, G Huang, S Song, L Yang, et al. (2021) Dynamic neural networks: A survey. IEEE Transactions on Pattern Analysis and Machine Intelligence.
[8]. Y Shang, S Wang, N Tang, Y Fu & K Wang (2024) Research progress in fault detection of battery systems: a review. Journal of Energy Storage.
[9]. S Chatterjee, RK Gatla, P Sinha, C Jena, et al. (2023) Fault detection of a Li-ion battery using SVM based machine learning and unscented Kalman filter. In Materials Today: Proceedings.
[10]. C Sun, Z He, H Lin, L Cai, H Cai & M Gao (2023) Anomaly detection of power battery pack using gated recurrent units based variational autoencoder. Applied Soft Computing.
[11]. J Alvarez (2024) Confident magnitude-based neural network pruning. arXiv preprint arXiv:2408.04759.
[12]. I Lazarevich, A Kozlov, et al. (2021) Post-training deep neural network pruning via layer-wise calibration. In Proceedings of the IEEE International Conference on Computer Vision Workshops.
[13]. Z Liu, J Xu, X Peng & R Xiong (2018) Frequency-domain dynamic pruning for convolutional neural networks. In Advances in Neural Information Processing Systems.
[14]. JM Ping & KJ Nixon (2024) Simulating Battery-Powered TinyML Systems Optimised using Reinforcement Learning in Image-Based Anomaly Detection. arXiv preprint arXiv:2403.05106.
[15]. X Wang, Z Zhang, C Zhang, X Meng, X Shi, et al. (2022) Transphos: A deep-learning model for general phosphorylation site prediction based on transformer-encoder architecture. International Journal of Molecular Sciences.
[16]. X Wang, P Cheng, X Liu, et al. (2018) Focal loss dense detector for vehicle surveillance. In International Conference on Intelligent Transportation Systems.
[17]. L Yao, Y Xiao, X Gong, J Hou & X Chen (2020) A novel intelligent method for fault diagnosis of electric vehicle battery system based on wavelet neural network. Journal of Power Sources.
Cite this article
Liu,J.;Wu,J.;Niu,D.;Zhao,J.;Wang,J.;Sun,Y.;Qin,Y.;Sun,X.;Zhang,Y.;Wang,Y.;Yan,Y.;Zhang,K.;Li,X.;Yang,C.;Wei,J. (2025). Thermal Runaway Prediction of Lithium-ion Battery based on Dynamic Pruned LSTM. Applied and Computational Engineering,153,96-103.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 3rd International Conference on Mechatronics and Smart Systems
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. W Gongquan, K Depeng, P Ping, et al. (2022) Thermal runaway modeling of lithium-ion batteries: a review. Journal of Global Change and Energy Management.
[2]. P Tagade, KS Hariharan, S Ramachandran, et al. (2020) Deep Gaussian process regression for lithium-ion battery health prognosis and degradation mode diagnosis. Journal of Power Sources.
[3]. M Li, C Dong, Y Mu, X Yu, Q Xiao, H Jia (2022), Data-model alliance network for the online multi-step thermal warning of energy storage system based on surface temperature diffusion. Patterns.
[4]. RR Ardeshiri, M Liu & C Ma (2022) Multivariate stacked bidirectional long short term memory for lithium-ion battery health management. Reliability Engineering & System Safety.
[5]. X Liu & H Huang (2024) Enhanced Wavelet Transform Dynamic Attention Transformer Model For Lithium-ion Battery Anomaly Detection. researchsquare.com.
[6]. S Xu, A Huang, L Chen & B Zhang (2020) Convolutional neural network pruning: A survey. In 2020 39th Chinese Control Conference.
[7]. Y Han, G Huang, S Song, L Yang, et al. (2021) Dynamic neural networks: A survey. IEEE Transactions on Pattern Analysis and Machine Intelligence.
[8]. Y Shang, S Wang, N Tang, Y Fu & K Wang (2024) Research progress in fault detection of battery systems: a review. Journal of Energy Storage.
[9]. S Chatterjee, RK Gatla, P Sinha, C Jena, et al. (2023) Fault detection of a Li-ion battery using SVM based machine learning and unscented Kalman filter. In Materials Today: Proceedings.
[10]. C Sun, Z He, H Lin, L Cai, H Cai & M Gao (2023) Anomaly detection of power battery pack using gated recurrent units based variational autoencoder. Applied Soft Computing.
[11]. J Alvarez (2024) Confident magnitude-based neural network pruning. arXiv preprint arXiv:2408.04759.
[12]. I Lazarevich, A Kozlov, et al. (2021) Post-training deep neural network pruning via layer-wise calibration. In Proceedings of the IEEE International Conference on Computer Vision Workshops.
[13]. Z Liu, J Xu, X Peng & R Xiong (2018) Frequency-domain dynamic pruning for convolutional neural networks. In Advances in Neural Information Processing Systems.
[14]. JM Ping & KJ Nixon (2024) Simulating Battery-Powered TinyML Systems Optimised using Reinforcement Learning in Image-Based Anomaly Detection. arXiv preprint arXiv:2403.05106.
[15]. X Wang, Z Zhang, C Zhang, X Meng, X Shi, et al. (2022) Transphos: A deep-learning model for general phosphorylation site prediction based on transformer-encoder architecture. International Journal of Molecular Sciences.
[16]. X Wang, P Cheng, X Liu, et al. (2018) Focal loss dense detector for vehicle surveillance. In International Conference on Intelligent Transportation Systems.
[17]. L Yao, Y Xiao, X Gong, J Hou & X Chen (2020) A novel intelligent method for fault diagnosis of electric vehicle battery system based on wavelet neural network. Journal of Power Sources.