






1. Introduction
Brain-computer interface (BCI) technologies allow for direct connection between the brain and external devices. These systems have the potential to significantly improve human-computer interaction and provide assistance to people who have movement disabilities. Motor imagery (MI), sensorimotor rhythms (SMRs), and P300-based paradigms are among the many BCI paradigms that have been the subject of much investigation due to the unique mechanisms and applications that each of these paradigms brings to the table. Through the use of electroencephalography (EEG) rhythms, MI-BCI is able to facilitate device control without the need for real motor execution. This is accomplished by focusing on the mental rehearsal of movements. The SMR-BCI system is based on the detection of oscillations in the alpha and beta frequency bands across the sensorimotor cortex. These oscillations are then translated into commands for prosthetics and virtual environments. Through the utilization of event-related potentials, the P300-based paradigm is able to identify the intentions of the user, which in turn enables communication and control of external equipment. This research also digs into advanced control techniques for brain-computer interface (BCI) systems. These strategies include proportional-integral-derivative (PID) control, model predictive control (MPC), and shared control, all of which improve the precision and responsiveness of BCI applications.
2. Non-invasive brain-computer interface mechanism research
2.1. Motor imagery paradigm
The motor imagery paradigm also known as MI-BCI (motor imagery-based brain-computer interface), involves mentally rehearsing a motor action without any physical movement. The primary electroencephalography rhythms can be modulated by MI, presented as decreased or increased EEG power in mu/alpha (8-13 Hz) and beta (14-30) bands [1]. There are also many MI to improve motor imagery patterns such as using dynamic video guidance. Research has demonstrated that this technique can lead to a more pronounced decrease in brain activity and enhance the accuracy of MI-BCI classification [2]. Another example is the use of multimodal stimulation paradigms, such as visual-auditory stimulation and electrical stimulation with proprioceptive stimulation, which have been shown to significantly improve the accuracy of classifying motor imagery tasks [2]. In addition, ta study compared the impact of electrical stimulation and visual stimulation on motor imagery and discovered that using multiple modes of stimulation can increase cortical activation during motor imagining [3]. The combination of visual stimulation and functional electrical stimulation (FES) can enhance motor cortical activation and classification performance during motor imagery tasks [4]. These examples demonstrate the effectiveness of multimodal stimulation paradigms in improving motor imagery patterns and BCI classification performance.
2.2. Sensorimotor paradigm
The sensorimotor paradigm involves using sensorimotor rhythms (SMRs) in the brain to regulate BCI. SMRs are oscillations in the alpha (8-13 Hz) or beta (13-30 Hz) frequency bands over the motor and sensorimotor cortex that are associated with motor imagery and execution. By detecting changes in SMRs through EEG, BCIs can be controlled noninvasively through motor imagery tasks [5]. BCIs can interpret neural signals related to motor imagery activities, such as envisioning the movement of a missing limb, by detecting changes in SMRs. These interpreted signals can then be used as orders for controlling prosthetic limbs [6]. SMRs can also translate these neural signals into commands for manipulating virtual objects in computer-generated environments. This application has implications for virtual reality, gaming, and human-computer interaction, offering new avenues for immersive experiences and user interfaces [7]. The use of sensory threshold neuromuscular electrical stimulation (STM) is a promising approach to enhance sensorimotor BCI performance. STM involves the application of electrical impulses at 40 Hz to modulate activity in the sensorimotor cortices and improve MI classification for BCI control [8]. Studies have demonstrated that STM can be utilized to specifically address the recovery of hand motor skills and produce both immediate and lasting enhancements in hand sensorimotor performance [9]..
2.3. P300 based paradigm
The P300 BCI paradigm is a type of BCI that relies on the P300 event-related potential (ERP) to detect brain activity and translate it into commands for external devices. The P300 ERP is a positive deflection in the EEG that occurs approximately 300 milliseconds after a stimulus is presented to the user [10]. The P300-speller paradigm is an example of P300 BCI paradigm, which detects the P300 ERP. The system can determine the user's intended character selection, allowing for communication without physical actions [11]. A novel method called the omitted elicited paradigm has been proposed to optimize the P300 BCI paradigm, where subjects are asked to pay attention to the pause of the stimulator while the others are vibrating together [12]. Compared to the traditional sequential paradigm, the omitted-elicited paradigm has two main advantages: The omitted elicited paradigm leads to a higher ITR compared to the traditional sequential paradigm. This improvement is achieved by changing the way of tactile stimulation to shorten the time spent per trial, resulting in a faster and more efficient BCI system [13]. The omitted elicited paradigm requires subjects to pay more attention to the pause of the target stimulator, which helps them concentrate on the target stimuli [14].
3. Research of external machine control paths
3.1. PID Control Strategy
The proportional-integral-derivative (PID) control system is a feedback control mechanism in engineering and industrial applications. The output of the PID controller is the sum of these three components:
\( τ(t)=Kp{e_{θ}}(t)+{K_{1}}∫ⅇ(t)ⅆt+{K_{d}}\frac{ⅆ{e_{θ}}(t)}{ⅆt} \)
To incorporate a PID control strategy in a BCI, it is necessary to use feedback control to regulate the system based on signals derived from the user's brain activity. BCI systems typically measure neural signals, such as EEG signals, which allow the user to interact with the device or control an external system [15].
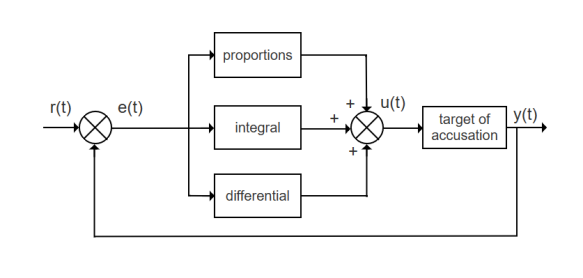
Figure 1. the PID pathway
3.2. MPC Strategy
The use of Model Predictive Control (MPC) in BCI systems can contribute to improving the management and engagement between a user's brain signals and external devices compared to traditional linear control methods. MPC employs a mathematical model to predict its future actions and determine the optimal state [16].
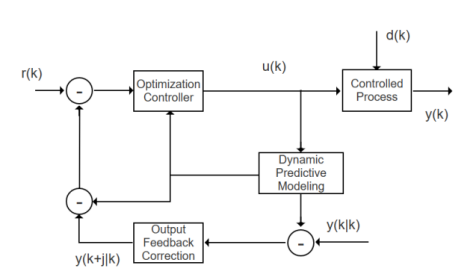
Figure 2. the MPC pathway
3.3. Shared Control Strategy and Application
Shared control is a collaborative control method where both human operators and autonomous systems or robots contribute to the control of a system or complete a task. This approach combines the decision-making and adaptability of human operators with the accuracy and effectiveness of autonomous systems [17]. Shared control is the process of combining the output of the BCI decoder with data from external sensors to regulate the behavior of dynamic devices. This approach has been primarily utilized for implementing emergency stopping, obstacle avoidance, and semiautonomous navigation in various dynamic devices [18]. Shared control can be categorized into two main branches: systems that solely provide sensor feedback to the BCI user, and systems that involve an element of automation, where a controller carries out actions based on sensor data [19].
Implementing PID control in BCI system enables more precisely and stable control of an external machine using signals collected from user’s brain. For a Fuzzy PID Control in BCI control system, it plays a vital role in realizing synergistic control between automation and brain control. By accessing the current status of the external machine in the non-invasive BCI and its switching rate,rather than relying solely on direct user instructions, the control system is able to determine the switching mechanism between automatic and brain control, thus improving the overall control performance [20]. By combing the Fuzzy PID control with the PID control, control signals can be optimized based on environmental conditions and user intent [21].
4. Arithmetic simulation
4.1. Algorithm
Within the realm of control systems, simulation refers to the process of constructing a mathematical representation of the system and utilizing the software tool MATLAB 2023b to examine the system's behavior under various circumstances. This entails implementing PID, fuzzy PID, and MPC controllers, as well as analyzing the system's reaction to the diverse control strategies. PID controllers are widely used because of their simplicity and effectiveness in regulating the behavior of a system.
The PID controller calculates the output control signal based on the error between the desired setpoint and the actual process variable. The PID controller consists of three components: the proportional term, the integral term, and the derivative term. Each component serves a distinct purpose in control. The proportional term provides an immediate response to the error, while the integral term is employed to reduce steady-state error. immediate response, the integral term is used to eliminate steady-state errors, and the derivative term is used to damp oscillations.
The tuning parameters of the PID controller, namely the proportional, integral, and differential parameters, significantly impact the system control's effectiveness. As the differential tuning parameter becomes smaller, the step response of the PD controller has a larger overshoot, but the control response of the system is slower. On the contrary, as the differential tuning parameter becomes larger, the overshot of the system decreases, and the control response of the system is faster.
4.2. Result
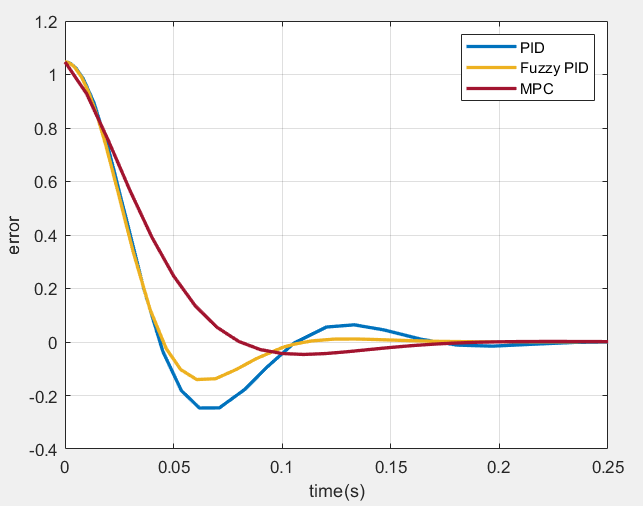
Figure 3. Simulation result
Based on the simulation results, it can be observed that the PID controller exhibits a greater overshoot and requires the most time to reach a condition of convergence. For the fuzzy PID controller, the overshoot is smaller than the PID controller and the convergence speed is faster, so its performance is better than the traditional PID controller. The MPC controller exhibits little overshoot and achieves the fastest stabilization, making it the ideal choice for control performance. However, the rise time of the MPC is relatively slower, taking approximately 0.1s to complete. However, in practice, the two main factors that play an influence on the control object are the overshooting of the controller and the convergence stabilization time. Therefore, the MPC controller has the best control effect, followed by the fuzzy PID controller and the least PID controller. According to the aforementioned findings, the utilization of Model Predictive Control (MPC) is deemed superior to the other two control methods due to the intricate nature of the Brain-Computer Interface (BCI) signal. Conversely, the response time of Proportional-Integral-Derivative (PID) control is slower and more susceptible to errors.
5. Conclusion
To summarise, motor imaging, sensorimotor rhythms, and P300-based paradigms are fundamental methods in BCI research, each with distinct advantages and uses. The use of multimodal stimulation has greatly improved the accuracy of MI-BCI, while the versatility of SMR-BCI is seen in its application for prosthesis control and virtual environments. The P300 paradigm, especially with advancements like as the omitted elicited paradigm, is continuously progressing, enhancing the effectiveness of communication between users and devices. Control techniques like as PID, MPC, and shared control are essential for optimising the performance of BCI systems. Simulations have shown that MPC is particularly successful in controlling complicated BCI signals.
In the future, researchers should persist in investigating methods to optimise the user experience of EEG-based biometrics. This encompasses the reduction of cognitive burden, the minimization of user irritation, and the guarantee of a comfortable and efficient engagement with the technology. Furthermore, it is imperative to create more user-friendly and functional instructions for managing devices through EEG signals. Research could investigate novel command paradigms, such as assistive technology tailored for those with profound mobility limitations, such as utilising facial gestures, to enhance detection accuracy and user contentment. Future research should prioritise the development of collections that integrate traditional machine learning, deep learning approaches, and brain-computer interface control system algorithms in order to enhance the overall performance of BCI control systems.
References
[1]. Gu, Bin, Kun Wang, Long Chen, et al. Study of the Correlation between the Motor Ability of the Individual Upper Limbs and Motor Imagery Induced Neural Activities. [J] Neuroscience 530 (2023): 56-65.
[2]. Optimized Motor Imagery Paradigm via Multimodal Stimulation and Explainable LSTM Model in fNIRS-based BCI
[3]. Bhattacharyya, S., Clerc, M., and Hayashibe, M. (2019). Augmenting motor imagery learning for brain–computer interfacing using electrical stimulation as feedback. IEEE Transactions on Medical Robotics and Bionics, 1(4), 247–255.
[4]. Song, M. and Kim, J. (2019). A paradigm to enhance motor imagery using rubber hand illusion induced by visuo-tactile stimulus. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 27(3), 477–486.
[5]. Baxter, Bryan S., et al. "Sensorimotor rhythm BCI with simultaneous high definition-transcranial direct current stimulation alters task performance." Brain stimulation 9.6 (2016): 834-841.
[6]. Wolpaw JR, McFarland DJ. Control of a two-dimensional movement signal by a noninvasive brain-computer interface in humans. Proc Natl Acad Sci USA 2004;101:17849–54. doi:10.1073/pnas.0403504101.
[7]. Kübler A, Nijboer F, Mellinger J, Vaughan TM, Pawelzik H, Schalk G, et al. Patients with ALS can use sensorimotor rhythms to operate a brain-computer interface. Neurology 2005;64:1775–7. doi:10.1212/01.WNL.0000158616.43002.6D.
[8]. Blankertz, B., Sannelli, C., Halder, S., Hammer, E.M., Kübler, A., Müller, K.-R., Curio, G., Dickhaus, T., 2010. Neurophysiological predictor of SMR-based BCI performance. Neuroimage 51 (4), 1303–1309.
[9]. Vidaurre, C., Murguialday, A. R., Haufe, S., Gómez, M., Müller, K. R., & Nikulin, V. V. (2019). Enhancing sensorimotor BCI performance with assistive afferent activity: an online evaluation. Neuroimage, 199, 375-386.
[10]. S. Sutton, P. Tueting, J. Zubin, and E. R. John, "Information delivery and the sensory evoked potential," Science, vol. 155, pp. 1436-9, Mar 17 1967.
[11]. Lu, Z., Gao, N., Zhou, W., Yang, J., Wu, J., & Li, Q. (2019, October). A comparison of facial p300-speller paradigm based on famous face and the familiar face. In 2019 12th CISP-BMEI (pp. 1-6).
[12]. Cao, B., Han, X., Tang, J., Zhou, Z., & Liu, Y. (2018, July). An optimizational tactile P300 brain-computer interface paradigm. In 2018 37th Chinese Control Conference (CCC) (pp. 8215-8220). IEEE.
[13]. Kaufmann T, Herweg A, Kübler A. Toward brain-computer interface based wheelchair control utilizing tactually-evoked event-related potentials[J]. Journal of NeuroEngineering and Rehabilitation, 2014, 11(1):1-17.
[14]. Xu R, Jiang N, Dosen S, et al. Endogenous Sensory Discrimination and Selection by a Fast Brain Switch for a High Transfer Rate Brain-Computer Interface[J]. 2016, 24(8):901-910
[15]. Azeez, M. I., Abdelhaleem, A. M. M., Elnaggar, S., Moustafa, K. A., & Atia, K. R. (2023). Optimization of PID trajectory tracking controller for a 3-DOF robotic manipulator using enhanced Artificial Bee Colony algorithm. Scientific reports, 13(1), 11164.
[16]. Chen, Tianhao, et al. "An improved finite control set-MPC-based power sharing control strategy for islanded AC microgrids." IEEE Access 8 (2020): 52676-52686.
[17]. L. Zhou, Y. Dou, H. Liu, W. Zhang, J. Hu and C. Yang, "Shared Control Method for Coal Mine Rescue Robots," 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 2021, pp. 1-6, doi: 10.1109/CVCI54083.2021.9661251.
[18]. Padfield, N., Camilleri, K., Camilleri, T., Fabri, S., & Bugeja, M. (2022). A comprehensive review of endogenous EEG-based BCIs for dynamic device control. Sensors, 22(15), 5802.
[19]. Li, J.; Li, Z.; Feng, Y.; Liu, Y.; Shi, G. Development of a Human-Robot Hybrid Intelligent System Based on Brain Teleoperation and Deep Learning SLAM. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1664–1674.
[20]. Dong, N., Zhang, W., & Gao, Z. (2019). Research on fuzzy PID Shared control method of small brain-controlled uav. ArXiv, abs/1905.12240.
[21]. R. Zahid and L. Bi, "Fuzzy-Based Shared Control for Brain-controlled Mobile Robot," 2020 39th Chinese Control Conference (CCC), Shenyang, China, 2020, pp. 3759-3764, doi: 10.23919/CCC50068.2020.9188584.
Cite this article
Zhu,M. (2024). A study of external machine control pathways based on brain-computer interfaces. Theoretical and Natural Science,58,83-88.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 4th International Conference on Biological Engineering and Medical Science
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Gu, Bin, Kun Wang, Long Chen, et al. Study of the Correlation between the Motor Ability of the Individual Upper Limbs and Motor Imagery Induced Neural Activities. [J] Neuroscience 530 (2023): 56-65.
[2]. Optimized Motor Imagery Paradigm via Multimodal Stimulation and Explainable LSTM Model in fNIRS-based BCI
[3]. Bhattacharyya, S., Clerc, M., and Hayashibe, M. (2019). Augmenting motor imagery learning for brain–computer interfacing using electrical stimulation as feedback. IEEE Transactions on Medical Robotics and Bionics, 1(4), 247–255.
[4]. Song, M. and Kim, J. (2019). A paradigm to enhance motor imagery using rubber hand illusion induced by visuo-tactile stimulus. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 27(3), 477–486.
[5]. Baxter, Bryan S., et al. "Sensorimotor rhythm BCI with simultaneous high definition-transcranial direct current stimulation alters task performance." Brain stimulation 9.6 (2016): 834-841.
[6]. Wolpaw JR, McFarland DJ. Control of a two-dimensional movement signal by a noninvasive brain-computer interface in humans. Proc Natl Acad Sci USA 2004;101:17849–54. doi:10.1073/pnas.0403504101.
[7]. Kübler A, Nijboer F, Mellinger J, Vaughan TM, Pawelzik H, Schalk G, et al. Patients with ALS can use sensorimotor rhythms to operate a brain-computer interface. Neurology 2005;64:1775–7. doi:10.1212/01.WNL.0000158616.43002.6D.
[8]. Blankertz, B., Sannelli, C., Halder, S., Hammer, E.M., Kübler, A., Müller, K.-R., Curio, G., Dickhaus, T., 2010. Neurophysiological predictor of SMR-based BCI performance. Neuroimage 51 (4), 1303–1309.
[9]. Vidaurre, C., Murguialday, A. R., Haufe, S., Gómez, M., Müller, K. R., & Nikulin, V. V. (2019). Enhancing sensorimotor BCI performance with assistive afferent activity: an online evaluation. Neuroimage, 199, 375-386.
[10]. S. Sutton, P. Tueting, J. Zubin, and E. R. John, "Information delivery and the sensory evoked potential," Science, vol. 155, pp. 1436-9, Mar 17 1967.
[11]. Lu, Z., Gao, N., Zhou, W., Yang, J., Wu, J., & Li, Q. (2019, October). A comparison of facial p300-speller paradigm based on famous face and the familiar face. In 2019 12th CISP-BMEI (pp. 1-6).
[12]. Cao, B., Han, X., Tang, J., Zhou, Z., & Liu, Y. (2018, July). An optimizational tactile P300 brain-computer interface paradigm. In 2018 37th Chinese Control Conference (CCC) (pp. 8215-8220). IEEE.
[13]. Kaufmann T, Herweg A, Kübler A. Toward brain-computer interface based wheelchair control utilizing tactually-evoked event-related potentials[J]. Journal of NeuroEngineering and Rehabilitation, 2014, 11(1):1-17.
[14]. Xu R, Jiang N, Dosen S, et al. Endogenous Sensory Discrimination and Selection by a Fast Brain Switch for a High Transfer Rate Brain-Computer Interface[J]. 2016, 24(8):901-910
[15]. Azeez, M. I., Abdelhaleem, A. M. M., Elnaggar, S., Moustafa, K. A., & Atia, K. R. (2023). Optimization of PID trajectory tracking controller for a 3-DOF robotic manipulator using enhanced Artificial Bee Colony algorithm. Scientific reports, 13(1), 11164.
[16]. Chen, Tianhao, et al. "An improved finite control set-MPC-based power sharing control strategy for islanded AC microgrids." IEEE Access 8 (2020): 52676-52686.
[17]. L. Zhou, Y. Dou, H. Liu, W. Zhang, J. Hu and C. Yang, "Shared Control Method for Coal Mine Rescue Robots," 2021 5th CAA International Conference on Vehicular Control and Intelligence (CVCI), Tianjin, China, 2021, pp. 1-6, doi: 10.1109/CVCI54083.2021.9661251.
[18]. Padfield, N., Camilleri, K., Camilleri, T., Fabri, S., & Bugeja, M. (2022). A comprehensive review of endogenous EEG-based BCIs for dynamic device control. Sensors, 22(15), 5802.
[19]. Li, J.; Li, Z.; Feng, Y.; Liu, Y.; Shi, G. Development of a Human-Robot Hybrid Intelligent System Based on Brain Teleoperation and Deep Learning SLAM. IEEE Trans. Autom. Sci. Eng. 2019, 16, 1664–1674.
[20]. Dong, N., Zhang, W., & Gao, Z. (2019). Research on fuzzy PID Shared control method of small brain-controlled uav. ArXiv, abs/1905.12240.
[21]. R. Zahid and L. Bi, "Fuzzy-Based Shared Control for Brain-controlled Mobile Robot," 2020 39th Chinese Control Conference (CCC), Shenyang, China, 2020, pp. 3759-3764, doi: 10.23919/CCC50068.2020.9188584.