







1. Introduction
Nowadays, the population growth of seniors older than 65 years old has already surpassed the growth of the younger generation's population. In addition to this, seniors will have a variety of different diseases associated with aging. This includes but is not limited to arthritis, cancer, chronic kidney, dementia, and Parkinson's Disease. Those diseases will cause a variety of different symptoms, which will take away seniors’ ability to live independently. Age-related changes in physical, perceptual, and cognitive abilities may make performing these tasks more difficult or challenging for older adults[2]. In fact, seniors usually have three or more limitations for activities in their daily life in long-term care facilities [2]. Eating limitations is one of the biggest problems for seniors. According to research, more than 40% of people older than 65 years old in the nursing home of the Village of Winston Park, Kitchener, Ontario, Canada cannot eat properly[4]. One of the diseases is Parkinson's Disease.
A tremor is one of the main Parkinson's Disease symptoms. It starts with a trembling of the tongue, followed by tremors of the fingers, then tremors of the hands, and finally tremors of the rest of the body [5]. When they are eating, they spill the food on the table easily. The situation for patients is likely to get even worse in the future. The main food source for most seniors with Parkinson's disease is liquid food since it is easier to eat and digest. Seniors’ digestive systems will become weaker and weaker as they get older. The strength of their jaws will also decrease. In this case, liquid food is best for their bodies to get the nutrition they need, and at the same time, it is easy for the patients to eat. Parkinson's disease affects around 1% of people older than 60 and 5% of people over 85. The percentage of Parkinson’s patients has been increasing. This disease causes physical disability that negatively affects the quality of life of the sufferers and their families physically, emotionally, socially, and economically [1]. In terms of eating, they would need the aid of a caretaker to eat. However, Robots have the potential to support the various physical, perceptual, and cognitive aspects of tasks of everyday living [2] such as eating. In fact, Parkinson’s patients feel positive about robots helping them in their daily life [7].
This study is going to design and develop a prototype of a mechanical feeding system that is going to be able to feed. In order to develop the prototype, Computer Aided Design is used to create the 3D model of the design. This study used a laser cutter to cut the flat pieces and a 3D printer to print the nonstandard pieces. Finally, the prototype was assembled along with off-the-shelf pieces. The product should be able to feed Parkinson's patients at a low cost. The machine should also be easy to install and easy to use. This study provides a reference for improving the quality of life of Parkinson's patients by providing a tool that could help patients eat independently. This is going to help the patients and their families economically, physically, and psychologically.
2. Design process
2.1. Design criteria
2.1.1. Lower price. The solutions should be modularly applied from an economical point of view. Most existing projects do not meet this criterion since they are either using complicated designs or very expensive materials. They are also using advanced technologies [3]. This includes vision systems, kinaesthetic learning, motors, microcontrollers, and a lot of other technologies [6]. The aim of the design is that it would be able to replace the job of a caretaker and feed the target audience at a low cost. The labor cost would be reduced and the seniors would be able to get assistance when they are eating with only a little cost. In other words, the amount of material that the design use should be relatively small, and the cost of the material should be cheap.
2.1.2. Simple installation. The feeding machine needs to be easy to integrate and install in the nursery or the senior's home. This is also something that most exciting projects fail to achieve since they are usually very big in terms of size. The design would aim to be as simple and as small as it could be so that it would be easier for seniors to use. This is related to the previous criterion because simple designs typically cost less for customers.
2.1.3. Minimized training. The system would require little training or no training for the users to use it. This is because the target audience for the design is older people who usually have difficulties with technologies and to make it convenient for them, the system should be easy to use [4]. In other words, everything is calculated already and there are not a lot of adjustments that the users need to make.
2.1.4. Feeding function. The last and most important criterion is its ability to feed target audiences successfully. This is because this system would need to replace the job of a caretaker effectively. The system will help with feeding the elderly liquid food. So this would be able to send food from the container of the machine to the senior's mouth without spilling or creating a mess.
2.2. Feasible ideas
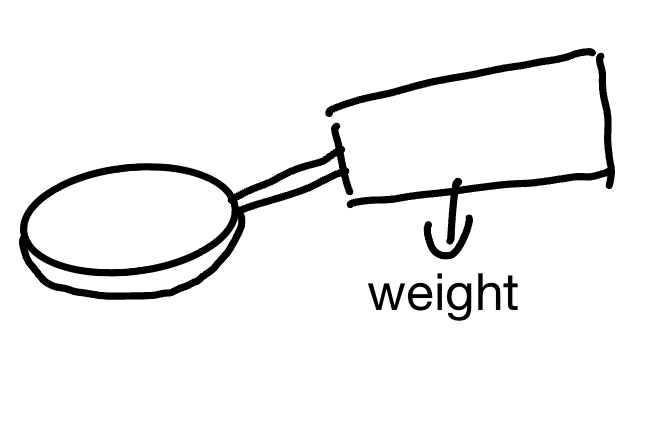
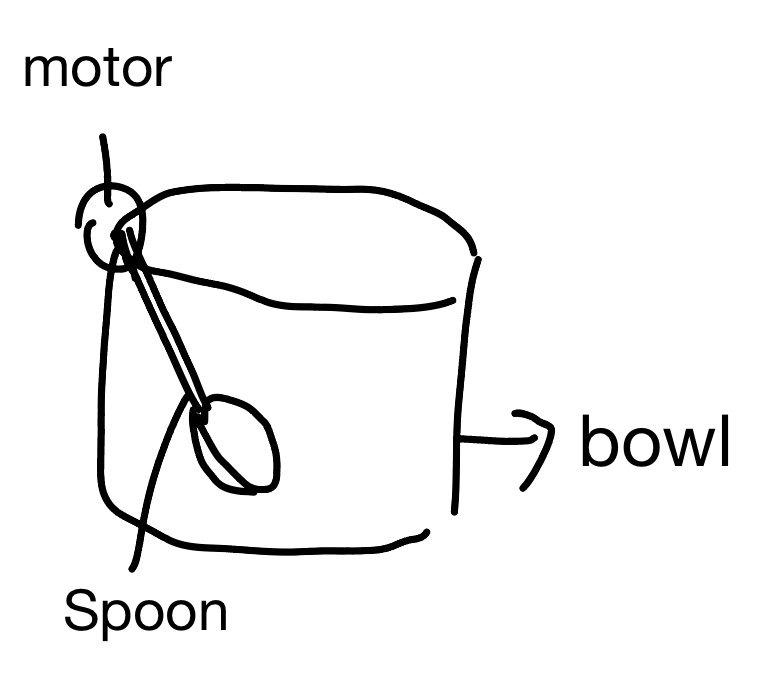
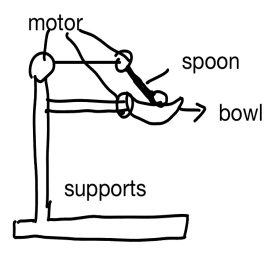
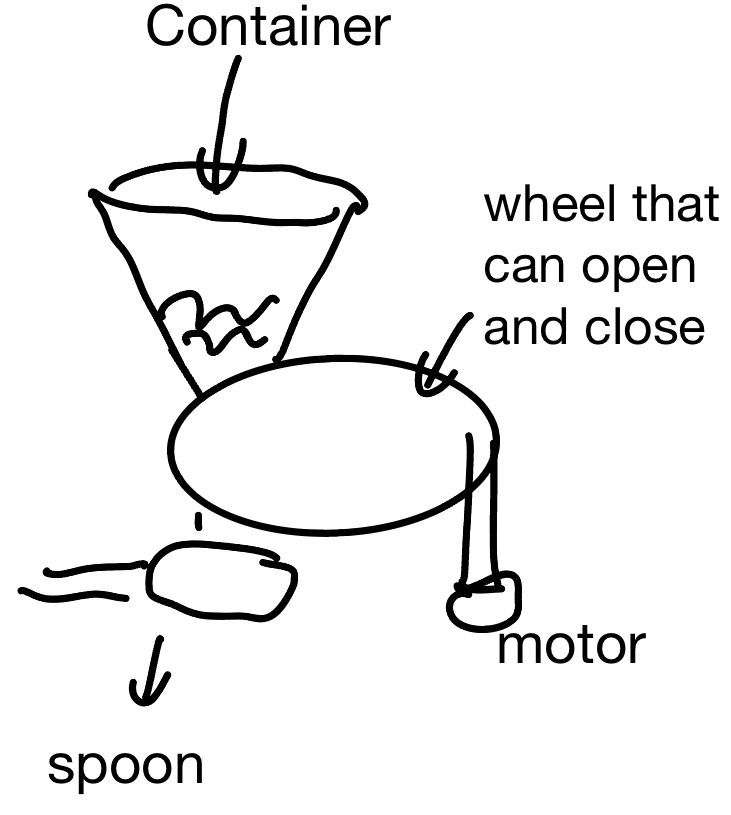
This study begins with 4 different ideas that might be able to feed seniors with Parkinson's disease. As shown in the figure below, the four feasible design ideas are sketched and analyzed. The first one is a weighted spoon. Users would hold it and it would be able to reduce tremors since it is heavier than a normal spoon. The second one is a bowl with a spoon inside. The spoon is connected to the edge by a motor and the motor will move up and down to get the food from the bowl to the spoon and the month of users. The third one is a mechanical arm. It has three motors that will be able to move the spoon, the arm, and the bowl. The last design is a bowl with an opening. The food will flow to the bottom of the container and the cutting wheel will let a certain amount of food out of the container every time the wheel rotates. Then each feasible design was analyzed based on the criteria that were created for evaluating the design (see analysis in Table 1 below).
Table 1. Feasible feeding machine design ideas and evaluations based on design criteria.
Design Ideas | Diagram | Easy to Install | Cheap | Minimized Training | *Able to Feed Successfully |
1. Weighted Spoon |
| Easy to make and can be carried around. | - All of them is made of 3D printed parts and laser cut parts. - Are not planning to use any expensive material for any of them. - Servo motors (relatively cheap) is going to be use for the motion for all designs. | Need to train the seniors to use it. | Only work for mild tremor. |
2. A Bowl with a Spoon |
| Relatively small in size. Can replace a bowl. | Would be able to feed people by taking the food out of the container. | Cannot take all the food out of the container. Some of the food would remain in the bowl. | |
3. Mechanical Arm |
| A little bit hard to implicate since it is relatively big and need space to store it. | The machine will send the food right in the front of people’s month. All they need to do is click a button. | Would work just like a caretaker. The simplified version the existing solutions. | |
4. A Bowl with Opening |
| Relatively small in size. | Would be able to feed the same amount of food every time. |
2.3. Operating principle
| Figure 1. Diagram for Version 3 Feeding Machine Design and the Names for Each Component (Geneva gears and spoon are not shown). |
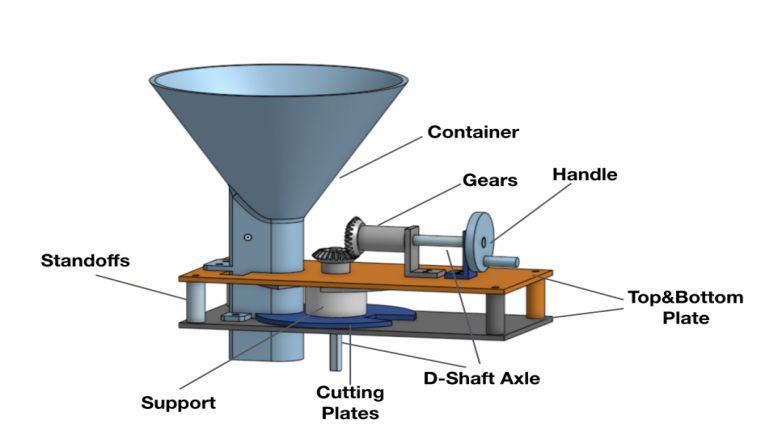
It can be observed from Figure 1 that the operating principle is that the patient would be able to control the spoon by doing exercise. The patient will rotate the handle themselves. It is going to be a very big handle and even if users have tremors in their hands, they will be able to do so. This works in conjunction with exercise treatments for Parkinson's patients. As the handle rotates, the gears will rotate and the wheel will rotate with the gears. When the tube of the container reaches the opening of the first wheel, the food will be loaded between the wheels. As the cutting wheels keep rotating, the food will eventually be located in an enclosed area between the wheels and eventually leave the tube to the spoon. The spoon will rotate 90 degrees for every rotation of the cutting wheel since it will be connected by geneva gears. The geneva gear is connected to the spoon, which is at the end of the tube. The drive wheel is connected to the axle for the cutting wheel. The gears can make sure when the cutting wheel is rotating, the spoon will not rotate until a certain point.
2.4. Evaluation based on design criteria
To begin with, the feeding machine can feed as described in the operating principle part of the results. Each part has its own usage, which was stated in the design analysis. Moreover, from testing, the feeding machine was able to feed raw rice successfully. However, there is still room for improvement for other kinds of food. There has not been any testing for other kinds of food yet.
Secondly, the feeding machine is easy to install. All parts are lightweight. All the manufactured pieces are relatively small and the dimensions are standard. 0.125 in plywood and 0.125 acrylics would be able to be cut by most laser cutters. Additionally, the 3D printed parts would be able to be manufactured using less than 1 coil of PLA. It would also be small enough in dimensions so that all 3D printers would be able to print it. For off-the-shelf parts, only hex screws and D-shaft are used. They are both very easy to get and use. It only has M3 and M4 screws and a quarter-inch D-shaft. The only tools that would be needed would be hex screwdrivers. With the help of the manufacturing guide, everyone should be able to integrate and install it, as is shown in Table 2.
Table 2. the cost of each material used in Version 3 Feeding Machine Design.
Unit price, quantity used, and the cost for different materials in a Version 3 feeding machine | |||
material | unit price | quantity used | cost |
PLA | $15-$20/kg | 0.25kg | 3.75 |
Wood | $13.24/18in*24in | 40in^2 | $1.50 |
acrylic | $7/6in*6in | 10in^2 | $2 |
d-shaft | 12$/5 | 2 | $5 |
screws | $12/box | 10 | $1 |
Total cost:$10.25
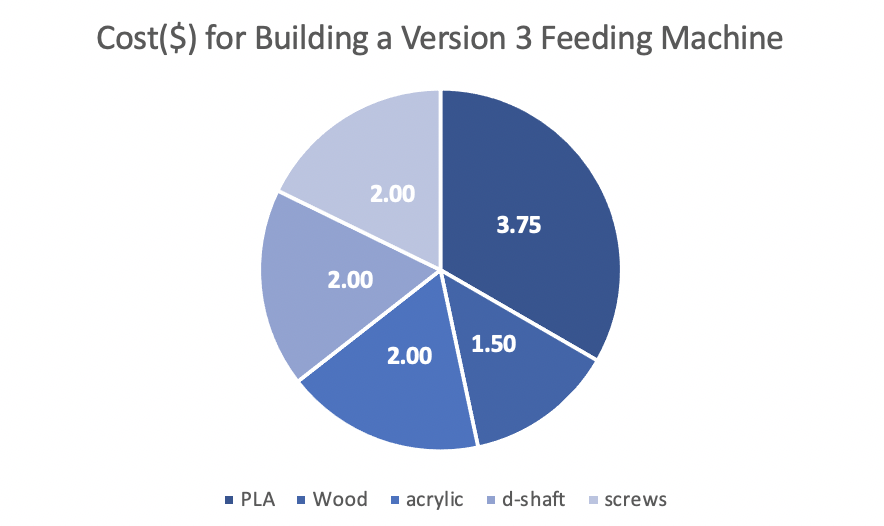
Figure 2. Pie chart for the cost of Version 3 Feeding Machine Design.
Thirdly, the feeding machine is cheap. As it is shown in Table 2 and Figure 2, the total cost of building the feeding machine is around $10 and no more than 20$. The material that the design is using is PLA, which costs around $3.75. It is the 3D printing material for the container in the middle, the spacer between the wheels, the crown gears and geneva gears, the spoon, the supports, the angle brackets, and the rotating handle. The wood is 125-inch plywood. It is used to integrate wood pieces for both wheels and the geneva gears. It is going to be around $1.50. Acrylic is used for the cutting wheels and it would be around $2.00. A D-Shaft is an axle that is used in my design. It is D-shaped and it would help with the rotations. 2 quarter-inch D-shaft is used in the design. One of them is vertical while the other one is horizontal. The prototype also used M3 and M4 screws for integrating the supports, the container, and the angle brackets to the wooden integration plate. It would be around $1.00.
Finally, the feeding machine requires minimal training. The user would need to move the handle 180 degrees for each spoon and that is all they need to do. The study would also attach a user manual for the users to integrate the machine and use the machine.
3. Conclusion
In conclusion, this feeding machine for Parkinson’s patients can not only help seniors with Parkinson's disease eat without a caretaker. The feeding machine met all the criteria listed in figure 2. It can perform the task of feeding with a minimal cost since all materials used are cheap. Minimal training is required to use it. The user only needs to pour their liquid food into the container and move the handle back and forth when they are eating. It is also easy to install and replace the job of a caretaker. In the future, the research would first finish working on integrating the spoon and the geneva gears, and by changing the handle design into motion, allowing users to get the exercise they need when they rotate the handle. After that, the prototype would try different types of food and modify the design based on the performance of the machine when handling different foods. On top of that, making the system waterproof by adding rubber on the sides of the tube and making the wheels thinner would be beneficial. Finally, the study would like to make the feeding machine available to more people. The study would publish the 2D drawings and 3D CAD of the design by attaching them to a paper or website. The research would also take it to nursing houses so that it would help seniors with Parkinson's disease. This would also include more testing and development with specialists and Parkinson's patients.
Acknowledgment
This research was supported by the ‘Iolani School honored independent research class, and fabrication lab by providing the 3D printer and laser cutter. This research would not have been possible without Dr. Yvonne Chan. She gave me critical feedback about the design and the paper. I would also like to thank Mr. Thomas Kuan. Although he is not physically present when I am making this, all the zoom meetings helped me a lot in the designing process. He inspired me to design the feeding machine the way it is. I wish to extend my special thanks to my family, especially my grandpa. He inspired me to conduct this research, and I wish it could help Parkinson's patients like him in the future.
References
[1]. Song, W., & Kim, J. (2012). Novel Assistive Robot for Self-Feeding. In (Ed.), Robotic Systems - Applications, Control and Programming. IntechOpen. https://doi.org/10.5772/25756
[2]. Smarr, Cory-Ann & Fausset, Cara & Rogers, Wendy. (2011). Understanding the potential for robot assistance for older adults in the home environment. Georgia Institute of Technology.
[3]. Higa, H., Kurisu, K., & Uehara, H. (2014). A Vision-Based Assistive Robotic Arm for People with Severe Disabilities. Transactions on Machine Learning and Artificial Intelligence, 2(4), 12–23. https://doi.org/10.14738/tmlai.24.309
[4]. Pourmohammadali, H., Kofman, J., & Khajepour, A. (2007). Design of a Multiple-User Intelligent Feeding Robot for Elderly and Disabled People. CMBES Proceedings, 30(1). Retrieved from https://proceedings.cmbes.ca/index.php/proceedings/article/view/180
[5]. Mshana, G., Dotchin, C. L., & Walker, R. W. (2011). 'We call it the shaking illness': perceptions and experiences of Parkinson's disease in rural northern Tanzania. 11(1), 1-8.
[6]. Kruthika, K., Kumar, B. K., & Lakshminarayanan, S. (2016, October). Design and development of a robotic arm. At the 2016 International Conference on Circuits, Controls, Communications, and Computing. 1-4 IEEE.
[7]. Briggs, P., Scheutz, M., & Tickle-Degnen, L. (2015, March). Are Robots Ready for Administering Health Status Surveys' First Results from an HRI Study with Subjects with Parkinson's Disease? In Proceedings of the tenth annual ACM/IEEE international conference on human-robot interaction 327-334.
Cite this article
Ge,R. (2023). Liquid food feeding machine prototype for seniors with Parkinson’s disease. Theoretical and Natural Science,5,58-63.
Data availability
The datasets used and/or analyzed during the current study will be available from the authors upon reasonable request.
Disclaimer/Publisher's Note
The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of EWA Publishing and/or the editor(s). EWA Publishing and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content.
About volume
Volume title: Proceedings of the 2nd International Conference on Computing Innovation and Applied Physics (CONF-CIAP 2023)
© 2024 by the author(s). Licensee EWA Publishing, Oxford, UK. This article is an open access article distributed under the terms and
conditions of the Creative Commons Attribution (CC BY) license. Authors who
publish this series agree to the following terms:
1. Authors retain copyright and grant the series right of first publication with the work simultaneously licensed under a Creative Commons
Attribution License that allows others to share the work with an acknowledgment of the work's authorship and initial publication in this
series.
2. Authors are able to enter into separate, additional contractual arrangements for the non-exclusive distribution of the series's published
version of the work (e.g., post it to an institutional repository or publish it in a book), with an acknowledgment of its initial
publication in this series.
3. Authors are permitted and encouraged to post their work online (e.g., in institutional repositories or on their website) prior to and
during the submission process, as it can lead to productive exchanges, as well as earlier and greater citation of published work (See
Open access policy for details).
References
[1]. Song, W., & Kim, J. (2012). Novel Assistive Robot for Self-Feeding. In (Ed.), Robotic Systems - Applications, Control and Programming. IntechOpen. https://doi.org/10.5772/25756
[2]. Smarr, Cory-Ann & Fausset, Cara & Rogers, Wendy. (2011). Understanding the potential for robot assistance for older adults in the home environment. Georgia Institute of Technology.
[3]. Higa, H., Kurisu, K., & Uehara, H. (2014). A Vision-Based Assistive Robotic Arm for People with Severe Disabilities. Transactions on Machine Learning and Artificial Intelligence, 2(4), 12–23. https://doi.org/10.14738/tmlai.24.309
[4]. Pourmohammadali, H., Kofman, J., & Khajepour, A. (2007). Design of a Multiple-User Intelligent Feeding Robot for Elderly and Disabled People. CMBES Proceedings, 30(1). Retrieved from https://proceedings.cmbes.ca/index.php/proceedings/article/view/180
[5]. Mshana, G., Dotchin, C. L., & Walker, R. W. (2011). 'We call it the shaking illness': perceptions and experiences of Parkinson's disease in rural northern Tanzania. 11(1), 1-8.
[6]. Kruthika, K., Kumar, B. K., & Lakshminarayanan, S. (2016, October). Design and development of a robotic arm. At the 2016 International Conference on Circuits, Controls, Communications, and Computing. 1-4 IEEE.
[7]. Briggs, P., Scheutz, M., & Tickle-Degnen, L. (2015, March). Are Robots Ready for Administering Health Status Surveys' First Results from an HRI Study with Subjects with Parkinson's Disease? In Proceedings of the tenth annual ACM/IEEE international conference on human-robot interaction 327-334.